目录
PID算法是一种控制算法
下面分别介绍PID算法中的三个参数
MATLAB代码实现PID
MATLAB代码实现PID
PID算法是一种控制算法
用于控制系统的稳定性和精度。PID算法的名称来源于其三个组成部分:比例(P)、积分(I)和微分(D)。PID算法通过不断测量系统的输出值和目标值之间的误差,并根据误差的大小和变化率来调整系统的控制参数,从而实现对系统的控制。
比例(P)控制是PID算法的最基本部分。它根据当前误差的大小来调整系统的输出值。比例控制的优点是简单易懂,但是对于系统的稳定性和精度有限。
积分(I)控制是PID算法的第二个部分。它根据误差的积累来调整系统的输出值。积分控制的优点是可以消除系统的稳态误差,但是容易导致系统的震荡和不稳定。
微分(D)控制是PID算法的第三个部分。它根据误差的变化率来调整系统的输出值。微分控制的优点是可以消除系统的瞬态误差,但是容易受到噪声的影响。
PID算法通过将比例、积分和微分控制结合起来,可以实现对系统的快速响应、精确控制和稳定性。它广泛应用于自动控制、机器人控制、工业控制等领域。
PID算法是一种用于控制系统的反馈控制算法,通常采用比例(P)、积分(I)和微分(D)三个参数来控制系统的输出。PID算法的目标是控制系统输出使其尽可能地接近所需的目标值或设定点。
下面分别介绍PID算法中的三个参数
1. 比例(P)参数
比例参数是最简单的一种参数,它根据偏差的大小来产生一个输出反馈。它的计算公式为:
P = Kp * Error
其中,Kp为比例系数,Error为控制变量与设定值之间的差值。比例参数是控制系统中最敏感的参数。它会直接影响系统的响应速度和稳态误差。
2. 积分(I)参数
积分参数用于纠正比例参数控制过程中产生的稳态误差。它的计算公式为:
I = Ki * ∫(Error * dt)
其中,Ki为积分系数,Error为控制变量与设定值之间的差值,dt是时间间隔。积分参数可以使系统产生更准确的控制效果,但如果积分参数调节不当,则会导致系统出现振荡和不稳定的情况。
3. 微分(D)参数
微分参数用于稳定系统并防止过度调节。它的计算公式为:
D = Kd * d(Error) / dt
其中,Kd为微分系数,Error为控制变量与设定值之间的差值,dt是时间间隔。微分参数可以使系统更加稳定,但如果微分参数调节不当,则会导致系统出现过度调节和噪声的情况。
MATLAB代码实现PID
用matlab写一个pid算法的程序,用于控制车的速度
方法一:
clear all;
close all;
% 假设小车的速度是v,设定目标速度为20km/h
target_v = 20/3.6; % 转换单位为 m/s
% 初始化PID参数
Kp = 0.5;
Ki = 0.0001;
Kd = 0.2;
% 初始化误差和
sum_error = 0;
last_error = 0;
% 初始化时间变量
t = 0; % 时间从0开始
dt = 0.05; % 时间间隔设定为50毫秒
% 循环模拟小车速度
while t < 60 % 模拟60秒钟的过程
% 测量当前速度
current_v = get_current_speed(); % 这里需要根据实际情况来测量当前速度
% 计算误差
error = target_v - current_v;
% 计算P、I、D控制量
P = Kp * error;
sum_error = sum_error + error;
I = Ki * sum_error;
d_error = (error - last_error) / dt; % 计算斜率
D = Kd * d_error;
% 计算输出控制量
output = P + I + D;
% 更新速度
update_speed(output); % 这里需要根据实际情况来实现更新小车速度的函数
% 更新误差变量
last_error = error;
% 更新时间
t = t + dt;
% 绘制速度曲线
plot(t, current_v, 'ro');
hold on;
end
xlabel('Time (s)');
ylabel('Speed (m/s)');
title('PID Control of Car Speed');
% 获取当前速度函数
function current_v = get_current_speed()
current_v = rand()*10; % 假设当前速度为一个随机的小数
endMATLAB代码实现PID
import matplotlib.pyplot as plt
# 定义PID控制器的参数
Kp = 0.5
Ki = 0.2
Kd = 0.1
# 定义目标速度和当前速度
target_speed = 50
current_speed = 0
# 定义误差和误差积分
error = 0
error_sum = 0
last_error = 0
# 定义控制器的输出
output = 0
# 定义时间步长和运行时间
dt = 0.1
t = 0
# 定义速度曲线列表
speed_list = []
# 循环运行PID控制器
while t < 10:
# 计算误差
error = target_speed - current_speed
# 计算误差积分
error_sum = error_sum + error * dt
# 计算误差微分
error_diff = (error - last_error) / dt
last_error = error
# 计算PID控制器的输出
output = Kp * error + Ki * error_sum + Kd * error_diff
# 更新当前速度
current_speed = current_speed + output * dt
# 将当前速度添加到速度曲线列表中
speed_list.append(current_speed)
# 更新时间
t = t + dt
# 绘制速度曲线图
plt.plot(speed_list)
plt.xlabel('Time')
plt.ylabel('Speed')
plt.title('PID Speed Control')
plt.show()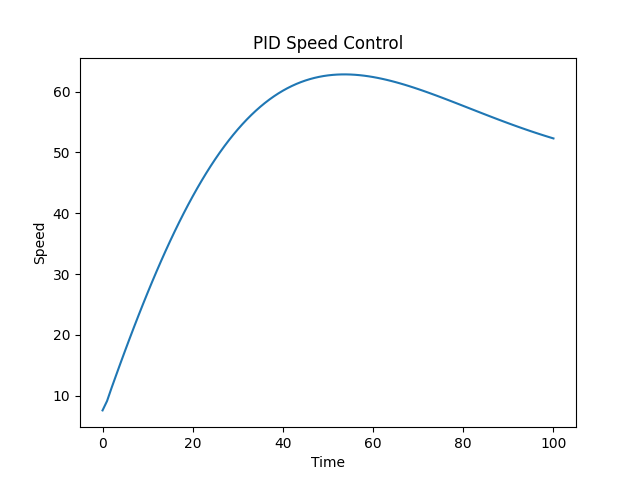
需要注意的是,该程序中需要根据实际情况来实现相关函数
例如get_current_speed()用于测量当前速度,update_speed()用于更新小车速度。此外,PID参数的设定和误差和的累加时需要根据实际情况进行调整。get_current_speed() 和 update_speed()需要根据实际情况去实现和定义。这两个函数分别用于获取当前速度和更新小车速度,以下是一个例子:
% 获取当前速度函数
function current_v = get_current_speed()
current_v = rand()*10; % 假设当前速度为一个随机的小数
end
方法二:
% 定义PID控制器的参数
Kp = 0.5;
Ki = 0.2;
Kd = 0.1;
% 定义目标速度和当前速度
target_speed = 50;
current_speed = 0;
% 定义误差和误差积分
error = 0;
error_sum = 0;
last_error = 0;
% 定义控制器的输出
output = 0;
% 定义时间步长和运行时间
dt = 0.1;
t = 0;
% 循环运行PID控制器
while t < 10
% 计算误差
error = target_speed - current_speed;
% 计算误差积分
error_sum = error_sum + error * dt;
% 计算误差微分
error_diff = (error - last_error) / dt;
last_error = error;
% 计算PID控制器的输出
output = Kp * error + Ki * error_sum + Kd * error_diff;
% 更新当前速度
current_speed = current_speed + output * dt;
% 输出当前时间和速度
fprintf('Time: %f, Speed: %f\n', t, current_speed);
% 更新时间
t = t + dt;
end>> PID
Time: 0.000000, Speed: 7.600000
Time: 0.100000, Speed: 9.144800
Time: 0.200000, Speed: 11.299590
Time: 0.300000, Speed: 13.363043
Time: 0.400000, Speed: 15.405731
Time: 0.500000, Speed: 17.417549
Time: 0.600000, Speed: 19.397028
Time: 0.700000, Speed: 21.341974
Time: 0.800000, Speed: 23.250441
Time: 0.900000, Speed: 25.120632
Time: 1.000000, Speed: 26.950900
Time: 1.100000, Speed: 28.739744
Time: 1.200000, Speed: 30.485810
Time: 1.300000, Speed: 32.187878
Time: 1.400000, Speed: 33.844867
Time: 1.500000, Speed: 35.455825
Time: 1.600000, Speed: 37.019926
Time: 1.700000, Speed: 38.536469
Time: 1.800000, Speed: 40.004866
Time: 1.900000, Speed: 41.424649
Time: 2.000000, Speed: 42.795455
Time: 2.100000, Speed: 44.117027
Time: 2.200000, Speed: 45.389210
Time: 2.300000, Speed: 46.611945
Time: 2.400000, Speed: 47.785263
Time: 2.500000, Speed: 48.909287
Time: 2.600000, Speed: 49.984220
Time: 2.700000, Speed: 51.010348
Time: 2.800000, Speed: 51.988029
Time: 2.900000, Speed: 52.917694
Time: 3.000000, Speed: 53.799843
Time: 3.100000, Speed: 54.635035
Time: 3.200000, Speed: 55.423894
Time: 3.300000, Speed: 56.167096
Time: 3.400000, Speed: 56.865369
Time: 3.500000, Speed: 57.519490
Time: 3.600000, Speed: 58.130282
Time: 3.700000, Speed: 58.698606
Time: 3.800000, Speed: 59.225364
Time: 3.900000, Speed: 59.711489
Time: 4.000000, Speed: 60.157949
Time: 4.100000, Speed: 60.565736
Time: 4.200000, Speed: 60.935870
Time: 4.300000, Speed: 61.269391
Time: 4.400000, Speed: 61.567358
Time: 4.500000, Speed: 61.830847
Time: 4.600000, Speed: 62.060948
Time: 4.700000, Speed: 62.258761
Time: 4.800000, Speed: 62.425395
Time: 4.900000, Speed: 62.561964
Time: 5.000000, Speed: 62.669587
Time: 5.100000, Speed: 62.749384
Time: 5.200000, Speed: 62.802476
Time: 5.300000, Speed: 62.829978
Time: 5.400000, Speed: 62.833004
Time: 5.500000, Speed: 62.812661
Time: 5.600000, Speed: 62.770046
Time: 5.700000, Speed: 62.706249
Time: 5.800000, Speed: 62.622348
Time: 5.900000, Speed: 62.519407
Time: 6.000000, Speed: 62.398479
Time: 6.100000, Speed: 62.260599
Time: 6.200000, Speed: 62.106787
Time: 6.300000, Speed: 61.938045
Time: 6.400000, Speed: 61.755357
Time: 6.500000, Speed: 61.559687
Time: 6.600000, Speed: 61.351980
Time: 6.700000, Speed: 61.133158
Time: 6.800000, Speed: 60.904122
Time: 6.900000, Speed: 60.665751
Time: 7.000000, Speed: 60.418900
Time: 7.100000, Speed: 60.164403
Time: 7.200000, Speed: 59.903066
Time: 7.300000, Speed: 59.635673
Time: 7.400000, Speed: 59.362985
Time: 7.500000, Speed: 59.085734
Time: 7.600000, Speed: 58.804631
Time: 7.700000, Speed: 58.520359
Time: 7.800000, Speed: 58.233577
Time: 7.900000, Speed: 57.944918
Time: 8.000000, Speed: 57.654989
Time: 8.100000, Speed: 57.364374
Time: 8.200000, Speed: 57.073630
Time: 8.300000, Speed: 56.783288
Time: 8.400000, Speed: 56.493857
Time: 8.500000, Speed: 56.205818
Time: 8.600000, Speed: 55.919631
Time: 8.700000, Speed: 55.635729
Time: 8.800000, Speed: 55.354521
Time: 8.900000, Speed: 55.076396
Time: 9.000000, Speed: 54.801716
Time: 9.100000, Speed: 54.530821
Time: 9.200000, Speed: 54.264032
Time: 9.300000, Speed: 54.001643
Time: 9.400000, Speed: 53.743930
Time: 9.500000, Speed: 53.491148
Time: 9.600000, Speed: 53.243529
Time: 9.700000, Speed: 53.001288
Time: 9.800000, Speed: 52.764619
Time: 9.900000, Speed: 52.533696
Time: 10.000000, Speed: 52.308678
在实际应用中,PID算法的准确性和稳定性很大程度上取决于这三个参数的调节。不同的应用场景需要不同的PID参数调节方法,包括经验法、试验法和优化算法等。