机器人导航必备的栅格地图数学模型及使用
- 占据栅格地图(Occupancy Grid Map)
- 占用栅格地图基础概念
- 占据栅格地图的数学模型
- ROS中使用OccupancyGrid
占据栅格地图(Occupancy Grid Map)
占用栅格地图基础概念


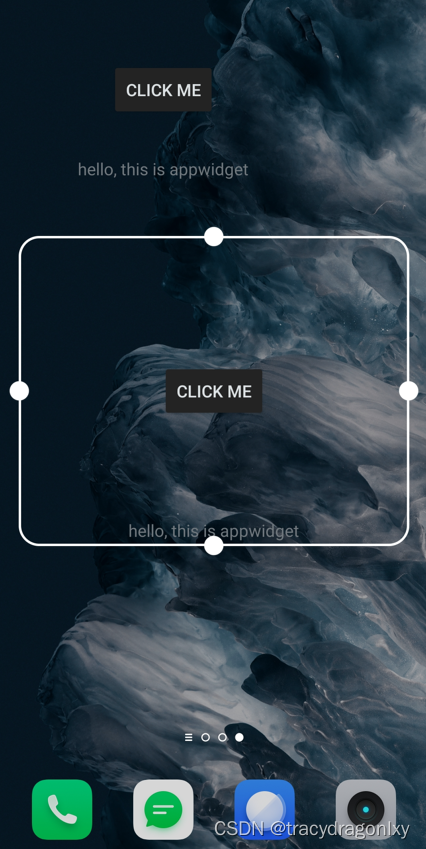
上图就是一个ROS中的占据栅格地图显示
栅格地图定义 :栅格地图就是用一个个栅格组成的网格来代表地图. 栅格里可以存储不同的数值, 代表这个栅格的不同含义.
ROS的栅格地图使用
- 白色代表空闲,也就是可通过区域,其存储的值为 0;
- 黑色代表占用,也就是不可通过区域,其存储的值为 100;
- 灰色代表未知,就是说目前还不清楚这个栅格是否可以通过,其存储的值为 -1.
占据栅格地图的数学模型
占据率(Occupancy)
在通常的尺度地图中,对于一个点,它要么有(Occupied状态)障碍物,要么没有(Free状态)障碍物
在占据栅格地图中,对于一个点,用
p
(
s
=
0
)
p(s=0)
p(s=0)来表示它是Free状态的概率;
用 p ( s = 1 ) p(s=1) p(s=1)来表示它是Occupied状态的概率.两者的和为1
引入两者的比值来作为点的状态: O d d ( s ) = p ( s = 1 ) p ( s = 0 ) Odd(s)=\frac{p(s=1)}{p(s=0)} Odd(s)=p(s=0)p(s=1)
对于一个点,新来了一个测量值,之后我们需要更新它的状态,假设测量值来之前,该点的状态为
O
d
d
(
s
)
Odd(s)
Odd(s),
我们要更新它为:
O
d
d
(
s
∣
z
)
=
p
(
s
=
1
∣
z
)
p
(
s
=
0
∣
z
)
Odd(s|z)=\frac{p(s=1|z)}{p(s=0|z)}
Odd(s∣z)=p(s=0∣z)p(s=1∣z)
这种表达方式类似于条件概率,表示在发生z的条件下s的状态。
根据贝叶斯公式,我们有:
p
(
s
=
1
∣
z
)
=
p
(
z
∣
s
=
1
)
p
(
s
=
1
)
p
(
z
)
p(s=1|z)=\frac{p(z|s=1)p(s=1)}{p(z)}
p(s=1∣z)=p(z)p(z∣s=1)p(s=1)
p
(
s
=
0
∣
z
)
=
p
(
z
∣
s
=
0
)
p
(
s
=
0
)
p
(
z
)
p(s=0|z)=\frac{p(z|s=0)p(s=0)}{p(z)}
p(s=0∣z)=p(z)p(z∣s=0)p(s=0)
带入
O
d
d
(
s
∣
z
)
Odd(s|z)
Odd(s∣z)中得到
O
d
d
(
s
∣
z
)
=
p
(
s
=
1
∣
z
)
p
(
s
=
0
∣
z
)
=
p
(
z
∣
s
=
1
)
p
(
s
=
1
)
/
p
(
z
)
p
(
z
∣
s
=
0
)
p
(
s
=
0
)
/
p
(
z
)
=
p
(
z
∣
s
=
1
)
p
(
z
∣
s
=
0
)
O
d
d
(
s
)
Odd(s|z)=\frac{p(s=1|z)}{p(s=0|z)}=\frac{p(z|s=1)p(s=1)/p(z)}{p(z|s=0)p(s=0)/p(z)}=\frac{p(z|s=1)}{p(z|s=0)}Odd(s)
Odd(s∣z)=p(s=0∣z)p(s=1∣z)=p(z∣s=0)p(s=0)/p(z)p(z∣s=1)p(s=1)/p(z)=p(z∣s=0)p(z∣s=1)Odd(s)
对两边取对数得:
l o g O d d ( s ∣ z ) = l o g p ( z ∣ s = 1 ) p ( z ∣ s = 0 ) + l o g O d d ( s ) logOdd(s|z)=log\frac{p(z|s=1)}{p(z|s=0)}+logOdd(s) logOdd(s∣z)=logp(z∣s=0)p(z∣s=1)+logOdd(s)
这样,含有测量值的项就只剩下了
l
o
g
p
(
z
∣
s
=
1
)
p
(
z
∣
s
=
0
)
log\frac{p(z|s=1)}{p(z|s=0)}
logp(z∣s=0)p(z∣s=1)称这个比值为测量值的模型,标记为
l
o
m
e
a
s
lomeas
lomeas
测量值的模型只有两种
l
o
f
r
e
e
=
l
o
g
p
(
z
=
0
∣
s
=
1
)
p
(
z
=
0
∣
s
=
0
)
lofree=log\frac{p(z=0|s=1)}{p(z=0|s=0)}
lofree=logp(z=0∣s=0)p(z=0∣s=1)和
l
o
o
c
c
u
=
l
o
g
p
(
z
=
1
∣
s
=
1
)
p
(
z
=
1
∣
s
=
0
)
looccu=log\frac{p(z=1|s=1)}{p(z=1|s=0)}
looccu=logp(z=1∣s=0)p(z=1∣s=1)
这样,如果我们用
O
d
d
(
s
)
Odd(s)
Odd(s)来表示位置s的状态S的话,我们的更新规则就进一步简化成了:
S
+
=
S
−
+
l
o
m
e
a
s
S^+=S^-+lomeas
S+=S−+lomeas
其中
S
+
S^+
S+和
S
−
S^-
S−分别表示测量值之后和之前的状态。
另外,在没有任何测量值的初始状态下,一个点的初始状态 S i n i t = l o g O d d ( s ) = l o g p ( s = 1 ) p ( s = 0 ) = l o g 0.5 0.5 = 0 S_{init}=logOdd(s)=log\frac{p(s=1)}{p(s=0)}=log\frac{0.5}{0.5}=0 Sinit=logOdd(s)=logp(s=0)p(s=1)=log0.50.5=0
经过这样的建模,更新一个点的状态就只需要做简单的加减法了。
例如
假设我们设定
l
o
o
c
c
u
=
0.9
looccu=0.9
looccu=0.9
l
o
f
r
e
e
=
−
0.7
lofree=-0.7
lofree=−0.7
那么, 一个点状态的数值越大,就表示越肯定它是Occupied状态,相反数值越小,就表示越肯定它是Free状态。
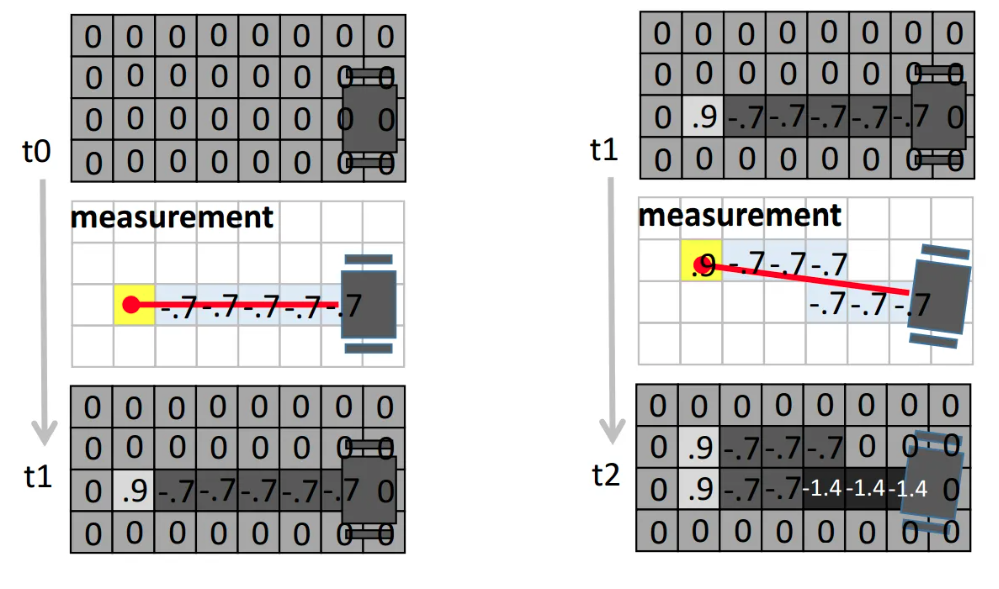
上图就展示了用两个激光传感器的数据更新地图的过程。在结果中,一个点颜色越深表示越肯定它是Free的,颜色越浅表示越肯定它是Occupied的。
ROS中使用OccupancyGrid
在ros中的数据格式定义如下:(官网链接)
std_msgs/Header header
nav_msgs/MapMetaData info
int8[] data
后续
详情参考 古月居