悲观锁和乐观锁
悲观锁:在每次取数据时,总是担心数据会被其他线程修改,所以会在取数据前先加锁(读锁,写锁,行 锁等),当其他线程想要访问数据时,被阻塞挂起。(互斥锁就是一种悲观锁)
乐观锁:每次取数据时候,总是乐观的认为数据不会被其他线程修改,因此不上锁。但是在更新数据前, 会判断其他数据在更新前有没有对数据进行修改。主要采用两种方式:版本号机制和CAS操作。(C++原子操作是基于CAS的乐观锁)
自旋锁

由于挂起等待也有一定的消耗,万一在挂起时直接再次申请锁就成功了,挂起锁的消耗就更高。自旋锁类似于在加锁时采用:
while(pthread_mutex_trylock(&mutex));的方式加锁。很有可能会反复申请锁,浪费CPU资源,只有在临界区的时间特别短才能使用
比如抢票代码:
#include<iostream>
#include<pthread.h>
#include<vector>
#include<string>
#include<unistd.h>
using namespace std;
int ticket = 1000;
class mutexGuard
{
public:
mutexGuard(pthread_spinlock_t* pmutex)
{
_pmutex = pmutex;
pthread_spin_lock(_pmutex);
}
~mutexGuard()
{
pthread_spin_unlock(_pmutex);
}
private:
pthread_spinlock_t* _pmutex;
};
class threadDate
{
public:
threadDate(const string& name, pthread_spinlock_t* pmutex)
:_name(name)
,_pmutex(pmutex)
{}
string _name;
pthread_spinlock_t* _pmutex;
};
void* getTicket(void* args)
{
threadDate* td = static_cast<threadDate*>(args);
while(ticket > 0)
{
{
mutexGuard mg = mutexGuard(td->_pmutex);
if(ticket > 0)
{
usleep(1000);
--ticket;
cout << td->_name << " : " << ticket << endl;
}
}
}
delete td;
return nullptr;
}
int main()
{
vector<pthread_t> tid(5);
int cnt = 0;
pthread_spinlock_t mutex;
pthread_spin_init(&mutex, PTHREAD_PROCESS_PRIVATE);
for(auto& e : tid)
{
threadDate* td = new threadDate("thread ", &mutex);
++cnt;
td->_name += to_string(cnt);
int n = pthread_create(&e, nullptr, getTicket, td);
}
//等待线程
for(auto& e : tid)
{
pthread_join(e, nullptr);
}
//销毁锁
pthread_spin_destroy(&mutex);
return 0;
}但如果临界区中有IO,就不要使用自旋锁。
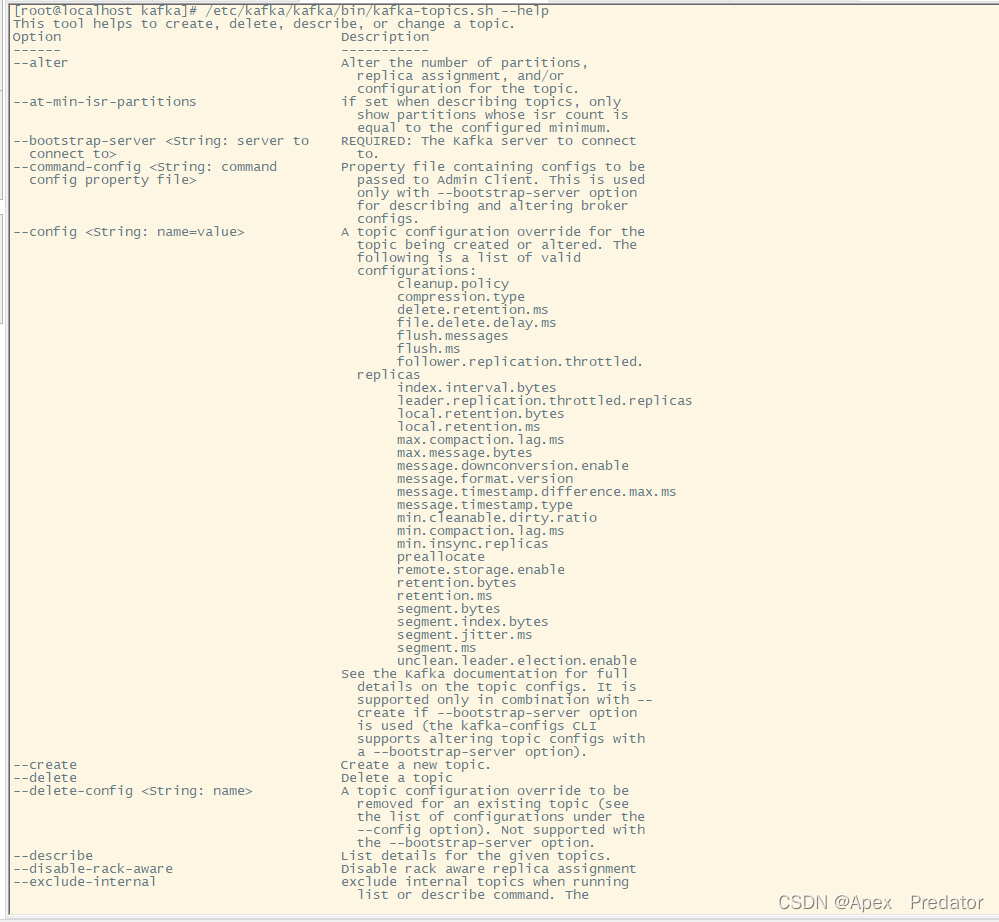
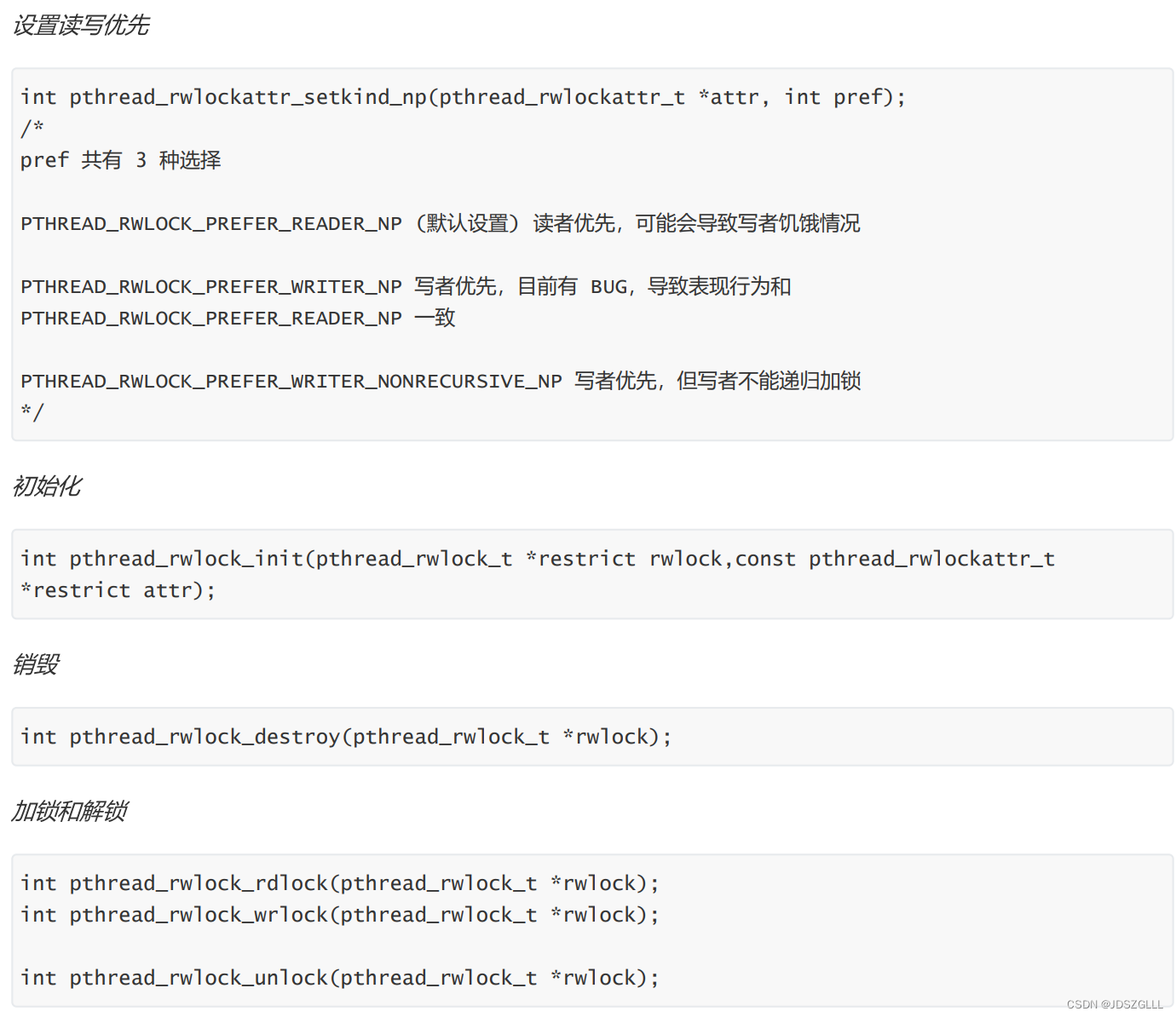
读写锁
在编写多线程的时候,有一种情况是十分常见的。那就是,有些公共数据修改的机会比较少。相比较改写,它们读的 机会反而高的多。通常而言,在读的过程中,往往伴随着查找的操作,中间耗时很长。给这种代码段加锁,会极大地 降低我们程序的效率。那么有没有一种方法,可以专门处理这种多读少写的情况呢? 有,那就是读写锁。
写者之间是互斥关系
读者之间没有关系
读者和写者之间是互斥且同步的关系




![P1039 [NOIP2003 提高组] 侦探推理](https://img-blog.csdnimg.cn/img_convert/a6e0b45b676d8b20ba3321a37e64fb7d.png)