轻量化是未来AR眼镜的发展趋势,为了缩减尺寸,AR眼镜厂商尝试了多种方案,长期来看Micro LED光机在小型化上更有优势,但现阶段LCoS光机的图像表现更好。在CES 2023期间,DigiLens、Lumus、Vuzix、OPPO、Avegant也展出了不同的轻量化AR方案。

近期,AR/VR光学专家Karl Guttag根据自己在CES 2023上的体验,总结了一些值得关注的Micro LED/LCoS+光波导的AR方案,并对两种光机在尺寸、图像、效率等方面进行了详细对比。本文篇幅较长,主要讨论了以下几个关键点:
- ◎ Micro LED和LCoS光机尺寸对比;
- ◎ Micro LED和LCoS图像质量对比;
- ◎ 反射和衍射光波导图像质量对比;
- ◎ 阵列光波导、衍射光波导+Micro LED的效率对比;
- ◎ Micro LED和LCoS效率对比;
- ◎ 眼镜外形可行性。
AR原型汇总
1)Vuzix Ultrallite与OPPO Air Glass 2
Ultralite和Air Glass 2均为双目AR一体机,采用JBD的单绿色光机(分辨率640x480)。两款AR眼镜的外观、图像质量、分辨率足够接近,重量也差不多在38g左右(包括镜框、处理单元、通讯模组、电池)。Air Glass 2还包括了麦克风和扬声器,可支持语音转文本、接打电话等功能。
Ultralite采用Vuzix自研的衍射波导(玻璃材质),可实现约30°FOV,3000尼特亮度。而OPPO则采用树脂材质的光波导(可配处方镜片),以及和Meta Bounds联合开发的Micro LED光学引擎,可实现27°FOV、1400尼特。Guttag指出,这是他第一次在可量产的AR产品中看到树脂光波导。

2)Lumus Z-Lens
Z-Lens配备了2Kx2K分辨率全彩LCoS光机,FOV可达50°,显示面积是其他AR头显的3-4倍,因此输出的光也要相应增加,像素总量相当于DigiLens Argo的4.5倍,Vuzix Ultralite、OPPO Air Glass 2的13倍以上。
Z-Lens为分体式设计,不能独立运行,主要是为了展示显示能力,并未内置电池和处理单元。可以将它看作是一种面向OEM厂商的AR参考设计。
3)DigiLens Argo
DigiLens Argo搭载了全彩LCoS光机(1280x720分辨率),该AR原型搭载了SLAM相机、GNSS、Wi-Fi模块、蓝牙模块、4800万像素彩色相机(支持像素binning)、语音识别模块、电池、CPU等部件,功能比Air Glass 2、Ultralite、Z-Lens更多。
DigiLens将向AR品牌、OEM发售Argo参考设计,同时也会发售光波导光学模组。
相机实拍图像
Guttag利用单反相机(OM-D E-M5 Mark III+17mm镜头)拍摄了四款AR眼镜的实际显示效果,照片中也体现了不同方案之间的显示面积差异。Lumus Z-Lens具有更大FOV、更高分辨率,在高亮度下色彩均匀性更好。此外,Z-Lens的阵列光波导搭配Micro LED在光效上有优势。
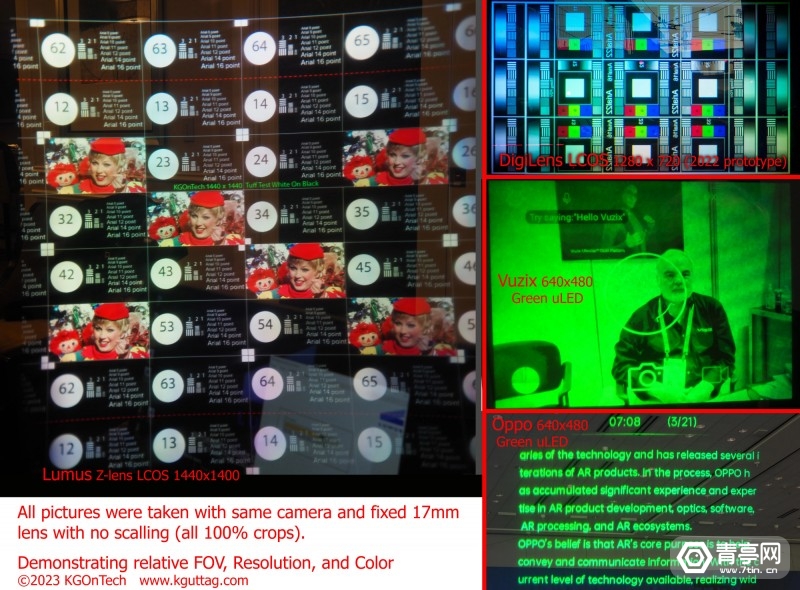
尽管LCoS光机在显示大面积、明亮图像方面,比Micro LED更有效,但Micro LED更省电,在显示稀疏图像时比LCoS更有优势。
光学引擎尺寸对比
Vuzix在CES 2023上展示了三款AR光机:Vuzix Blade的DLP方案、Micro LED合色棱镜(RGB),以及Ultralite、Shield采用的单绿色Micro LED方案。其中,单绿色Micro LED的尺寸最小。

DigiLens Argo采用比较传统的LCoS引擎(基于Omnivision方案,采用ASIC驱动),图中的虚线指出了光学引擎对光波导的遮挡。正是由于这种遮挡,Argo镜片上半部分看起来比较深,目的是隐藏这种缺点。Guttag指出,其他公司为了避免光学引擎遮挡视线,通常都会改变引擎的位置,但DigiLens却没这么做,因此Argo上半部分有一段较宽的黑色挡板,看起来就像是某种刘海。

Lumus研发阵列光波导已经近20年时间,早期的一维扩瞳光波导方案需要使用较宽的光学引擎,后来随着二维扩瞳方案推出,光学引擎尺寸也得到缩小。而Z-Lens则采用了更小的光学引擎,引擎对光波导的遮挡也得到改善。

而OPPO Air Glass 2利用宽镜框来隐藏光学引擎。
Z-Lens消除光波导气隙层
通常,彩色衍射波导通常会将两层或三层光波导叠加在一起,每层之间有气隙,这种气隙会造成额外的全内反射,因此需要增透膜来消除反射,提升光效。
Z-Lens采用的光波导和Lumus此前的方案不同,它不需要在光波导表面和封装塑料之间留有空隙。这种空隙通常会导致光线在通过时产生损失或发散,还会带来设计、成本等问题。因此通过减少气隙,Z-Lens改善了这些问题。Guttag还指出,这种设计可以更好的集成处方镜片或是保护层。
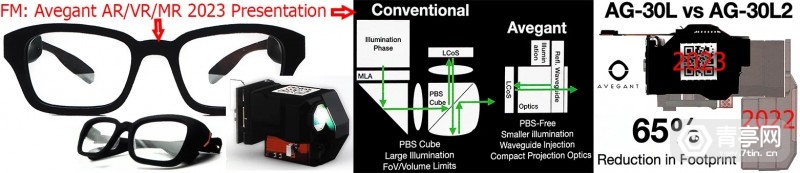
对比Avegant和ML2的LCoS引擎
Guttag指出,传统的LCoS引擎尺寸比较大,而Z-Lens、Avegant、ML2所采用的LCoS引擎,尺寸得到优化,比常见的Micro LED光机更小,而且对光波导的遮挡减少。
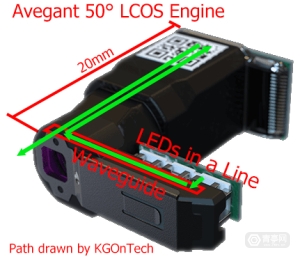
在2022年时,Avegant曾展示一款L形光学引擎,其特点是大部分位于镜腿位置,前部对镜片的遮挡很小。这种设计的缺点,是会阻碍AR眼镜的镜腿折叠。

而在2023年,Avegant公布了新的LCoS引擎,特点是尺寸比之前缩小了65%(长15.6mm,宽12.4mm),可实现更轻量化的AR眼镜设计,而且可以让镜腿有一定程度的折叠。此外,该方案可实现30°FOV、34PPD,其全彩模式的亮度在1500尼特以上,在户外场景可以有限色彩显示。
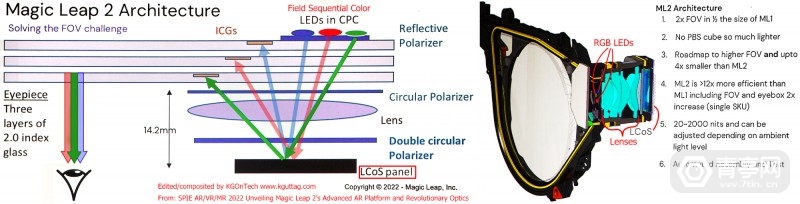
ML2则进一步缩小了光学引擎的尺寸,并将LED和LCoS光源放在光波导两侧,宣称可实现2000尼特亮度、70°视场角。
对比Birdbath透光性
光波导AR眼镜的透光率大约在80-90%左右,相比于Birdbath(透光率通常25%),光波导可透过更多环境光。

目前,市面上一些Birdbath AR眼镜(比如Nreal、联想A3)的设计与早期的ODG R6眼镜相似。尽管ODG已经倒闭,但曾就职于该公司的设计师依然在AR行业,有的进入了联想,也有的在Pulsar、DigiLens等AR公司就职。相比于ODG所使用的Birdbath光学方案,光波导方案为AR眼镜带来多项升级,比如外形更轻、更薄,而且适眼距更大、透光性更好、光效更高、更省电。由于AR眼镜尺寸缩小,因此可以集成计算单元等更多元件。
前向漏光(eye glow)
在此前的文章中,Guttag多次强调AR眼镜中常见的一种eye glow现象,这种现象与AR眼镜的光路设计有关,由于产生了向前投影,AR光线不仅进入人眼,也会从镜片外面透出,看起来就像是眼镜在发光。这种现象在HoloLens 1和2、ML1和2头显上都比较明显,常见的Birdbath AR眼镜也存在该问题,但因为其透光性比较差,外观看起来更像是墨镜,因此发光问题看起来比较不明显。

近年来,Dispelix、DigiLens、Lumus等公司正在尝试改善AR的eye glow现象,其中Lumus采用的反射式光波导可以比较好的改善向前投影,DigiLens Argo也减少了eye glow现象。而Vuzix Shield,则还存在一些向前投影问题(也会照亮用户脸颊)。OPPO Air Glass 2也有明显的向前投影。

DigiLens Argo深度解析
DigiLens的光学方案以衍射光波导为主,此前曾展示接近成品的AR眼镜原型,后来在2021年经历了一次重大管理层变化,随后业务战略也发生了改变,主要分为三大块:新兴材料、光波导、AR智能眼镜。在今年1月,该公司推出了AR眼镜ARGO,不同于以往的AR原型,ARGO是其首款轻量化AR整机,主要面向to B场景。
为了进一步了解为什么DigiLens的业务从开发AR模组扩展到开发AR整机,Guttag向该公司咨询了具体的商业模式,得到了关于其业务的详细解释:
1)授权光学解决方案:DigiLens向OEM厂商授权光波导制造工艺(可扩展打印、非接触式复制),允许客户在此基础上设计和制造自定义光波导方案;这项业务主要针对可量产AR眼镜的大公司,应用场景以消费级AR眼镜为主;
2)to B AR眼镜:向企业、工业客户提供ARGO等AR整机,其特点是可批量供应,并可根据目标应用场景的需求定制,以满足合规性和可靠性;DigiLens的AR整机将基于自研光学技术,由一个在企业级、工业级AR眼镜上有丰富经验的内部团队打造(成员曾就职于Daqri、ODG、RealWear);
◎ 关于图像质量
在过去几年里,DigiLens的AR光波导技术在图像质量上不断提升,eye glow和图像均匀性问题都得到改善,但在观影、显示照片上效果还不够理想。尽管如此,ARGO作为一款to B产品,图像质量只是其中一个卖点,产品的整体实用性也很重要。就像是HoloLens 2,尽管在显示效果上存在彩虹效应等问题,但还是可以满足一些企业场景的需求,比如显示AR指示信息(箭头、数字、线条)时,只需要清晰显示几种颜色就足够实用。
◎ 关于FOV
ARGO的视场角为30°,用来玩AR游戏可能不够用,但是在企业级AR场景则可以满足。实际上,不同于VR,AR不需要很宽的视场角,大视场角不仅容易导致视觉疲劳,也会增加AR眼镜的重量、功耗和成本。
◎ 关于功能
作为AR整机,ARGO内置了企业应用所需的多项功能,比如拍照/视频、SLAM/3D深度/6DoF定位、Wi-Fi、GNSS、麦克风/扬声器等等。此外,它采用一体机设计,内置了电池。与同样是AR一体机的HoloLens 2(52°FOV)相比,ARGO的FOV更小,但图像质量要更好。

◎ 关于语音操作
DigiLens管理团队的部分成员来自RealWear,因此在工业级穿戴式设备上具有经验。据悉,RealWear此前曾收购Kopin的可穿戴设备业务线Golden-i,该公司的智能眼镜也参考了Golden-i的一些设计,比如支持优秀的语音识别功能,即使在吵闹的环境中也能准确识别语音信息。同样,ARGO搭载了5个麦克风单元,以实现更好的语音输入效果。
在大多数企业级AR应用场景中,“免提操作”是一个关键的亮点,这指的是AR眼镜可以通过眼球输入、语音输入来省去手柄,从而解放双手,允许使用者一边查看AR内容,同时一边操作其他工作。
尽管手势追踪省去了对手柄的依赖,但依然占用使用者的手,而且手势追踪的准确性和响应速度通常不如手柄,在使用时容易让人分心。另外,在输入密码、文字方面,手势的效率相当低。
与此同时,如果语音输入在吵闹环境下也可以准确运行,那么它实际上在解放双手上更有优势。不过,这依赖于良好的语音识别技术,如果出现单词、短语难以识别、错误识别的问题,那么用起来会比较麻烦,可能需要使用者多次修改和验证。
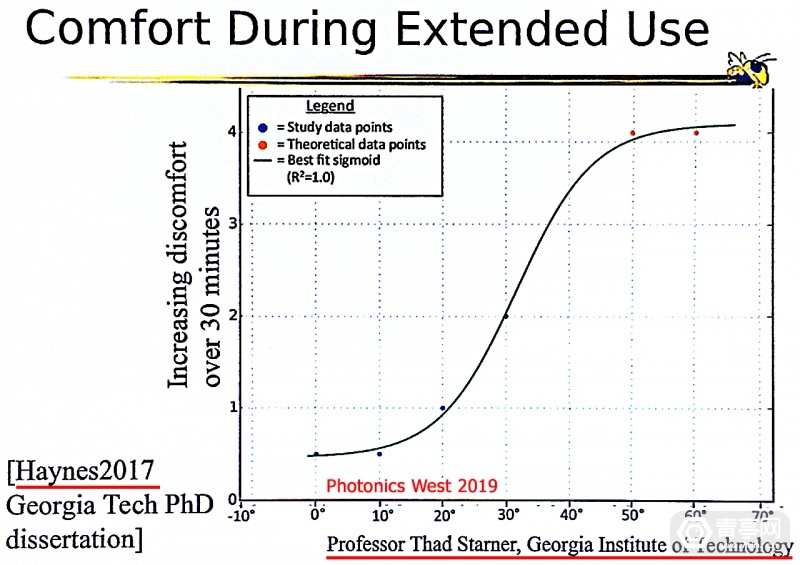
◎ 关于头带设计
考虑到长时间使用的实用性,ARGO并未采用普通的镜腿设计,而是将镜腿尾部做得比较弯,更贴合头部,类似于HoloLens 2头箍和镜腿的折中版。相比于HoloLens 2(566g),ARGO要轻得多(不到185g),但它比Nreal Light(106g)等BB方案的分体式AR眼镜要更重。实际上,人的耳朵和鼻梁不能长时间承受太大重量,因此ARGO如果采用普通镜腿设计,长时间使用可能会给面部带来压力。
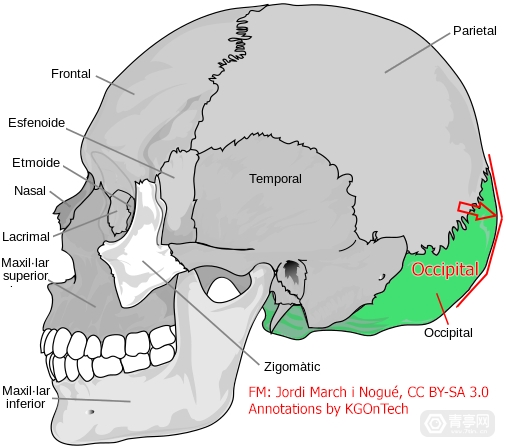
不过Guttag指出,后脑勺上部能对分担AR眼镜重量的作用很小,因此弯曲的镜腿并不能很好的抓取头骨,AR眼镜的重量还是会向前倾,除非将镜腿环绕在后脑勺枕骨下方。

松下MeganeX也采用类似的镜腿设计,区别是MeganeX在额头采用了衬垫来提供支撑,而ARGO则是采用了一个较厚的鼻托来提供缓冲。Guttag认为,柔软的厚鼻托并不能很好的缓解AR眼镜的重量感,而且这种设计并不适合多样的鼻型,而且很难和屈光眼镜叠加使用。

除了贴合头部的设计外,ARGO镜腿尾部可选择接入可调节绑带,该绑带设计简单、轻巧,采用布面材质,主要通过书包上常见的塑料扣来调节长度。

◎ 关于前后配重
AR眼镜重量的均匀分布很重要,因此HoloLens 2将电池等部件放在后脑勺位置,作为配重来平衡前部的显示单元,从而优化头显的整体舒适性。尽管前后配重的设计减少了AR头显前部的体积,但整体还是比较笨重,而并没有朝着AR眼镜的方向去优化设计。
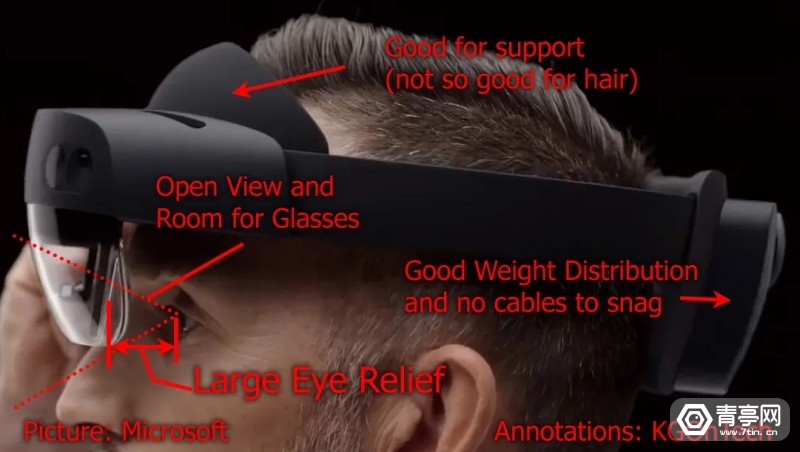
◎ 关于适眼距
HoloLens 2具有较大的适眼距,为用户留出了佩戴普通眼镜的空间。ARGO的适眼距并不小,可叠加额外的眼镜来使用,但由于其人体工学设计,鼻托部分并没有为普通眼镜框留出空间。除此之外,ARGO的上半部部分有较宽的“刘海”,叠加屈光眼镜会有一定遮挡问题。因此,用户需要使用插入式屈光镜片来调节视力。

插入式镜片有一个缺点,就是可能会造成额外的eye glow效果,Guttag猜测可能是因为没有使用理想的抗反射涂层。
Guttag指出,ARGO追求轻量化的眼镜外形,而牺牲了对近视眼用户的实用性。如果从舒适性和功能性出发,也许DigiLens可以采用不同外形、尺寸的光学引擎。
总结
长期来看,尽管Micro LED在尺寸等方面具有优势,但现阶段在图像质量、色彩等方面还无法与LCoS媲美。因此,当前LCoS和光波导结合的AR方案会比Micro LED更加常见,LCoS不仅在尺寸、形状上有竞争力,它还可以实现比现有Micro LED更高的分辨率和更高的FOV。

而且出于对成本、色彩、图像质量的考虑,Micro LED在轻量化数据眼镜中的应用比较有限(数据眼镜仅通过AR来显示箭头等基础信息,不需要显示高质量视频)。应用场景方面,单色AR数据眼镜在企业级场景足够用,但对消费者的吸引力可能不大,消费级应用场景更倾向于观影、玩游戏,对彩色显示的质量、分辨率要求较高。
在光波导方面,Lumus Z-Lens的二维阵列光波导在图像质量、效率方面比许多衍射波导更好,而且它的无气隙封装工艺也是一大优势。尽管如此,当前大多数光波导AR方案基于衍射波导,原因是市面上供应的衍射波导选择更多,而且容易定制。相比之下,二维反射波导技术主要由Lumus控制,而且其成本较高。
至于ARGO AR眼镜,它体现了现阶段硬件厂商在功能性和外形上的取舍,即AR眼镜搭载的功能越多,其外观越笨重,越不像普通眼镜。通常,AR眼镜设计以眼镜形态为目标,但成品却总是接近HoloLens的头显形态。参考:KG