STM32CubeMX | 使用STM32定时器的PWM输入模式测量脉冲宽度和周期
目录
- STM32CubeMX | 使用STM32定时器的PWM输入模式测量脉冲宽度和周期
- 1、介绍
- 2、STM32CubeMX配置
- 2.1 基本配置
- 2.2 PWM输出配置
- 2.3 PWM输入捕获配置
- 3、程序修改和测试
本篇博客以STM32F103C8为例,其他系列MCU可能稍有不同,但原理一样。
相关链接博文:
- STM32CubeMX | STM32使用HAL库实现定时器PWM输出
- STM32CubeMX | STM32使用HAL库进行脉冲宽度和周期测量
1、介绍
以前写过一篇博文,介绍的是如何使用定时器的输入捕获功能测量脉冲的宽度以及周期,适合测量某个脉冲或者测量按键按下时候的保持时间(见上面链接博客),不适合测量连续输出的脉冲场景。
STM32的定时器还存在一个PWM输入模式,只要将未知PWM波接入到定时器输入模式的引脚上,会自动算出占空比和周期,相当于示波器探针了。
2、STM32CubeMX配置
2.1 基本配置
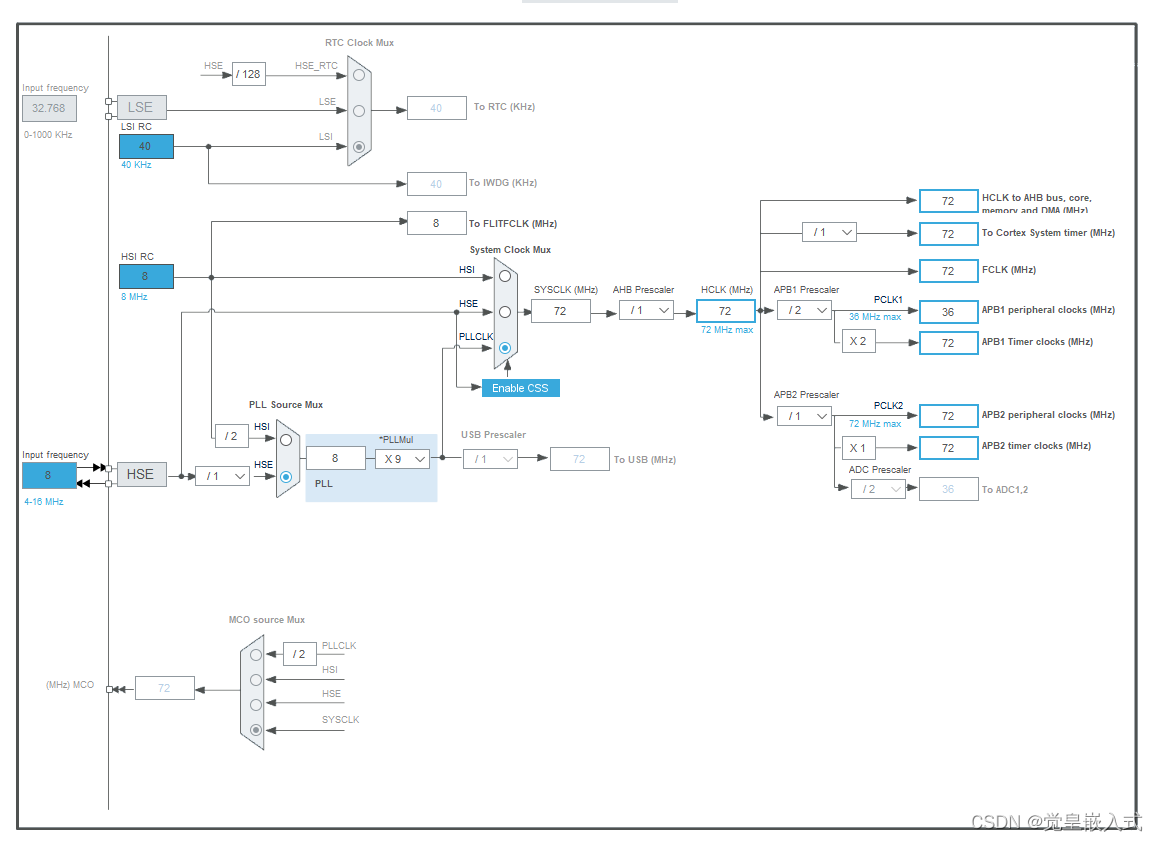
使用的是STM32F103C8,时钟配置到72M主频:
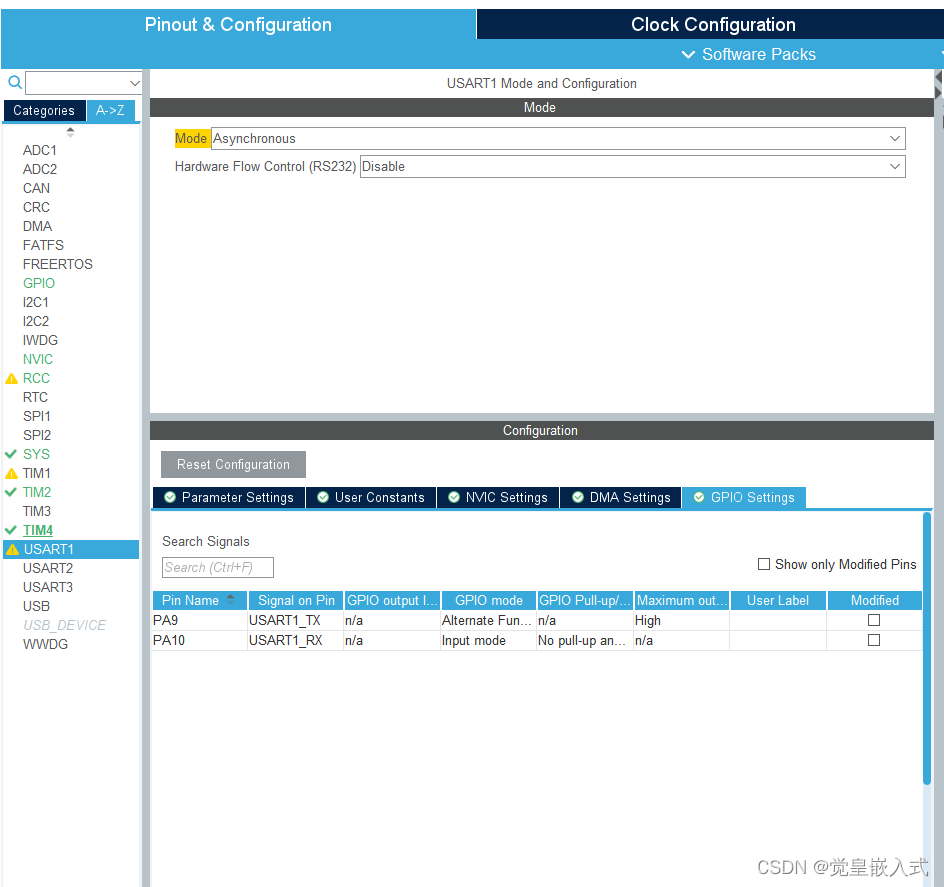
使能串口1,用于调试打印:
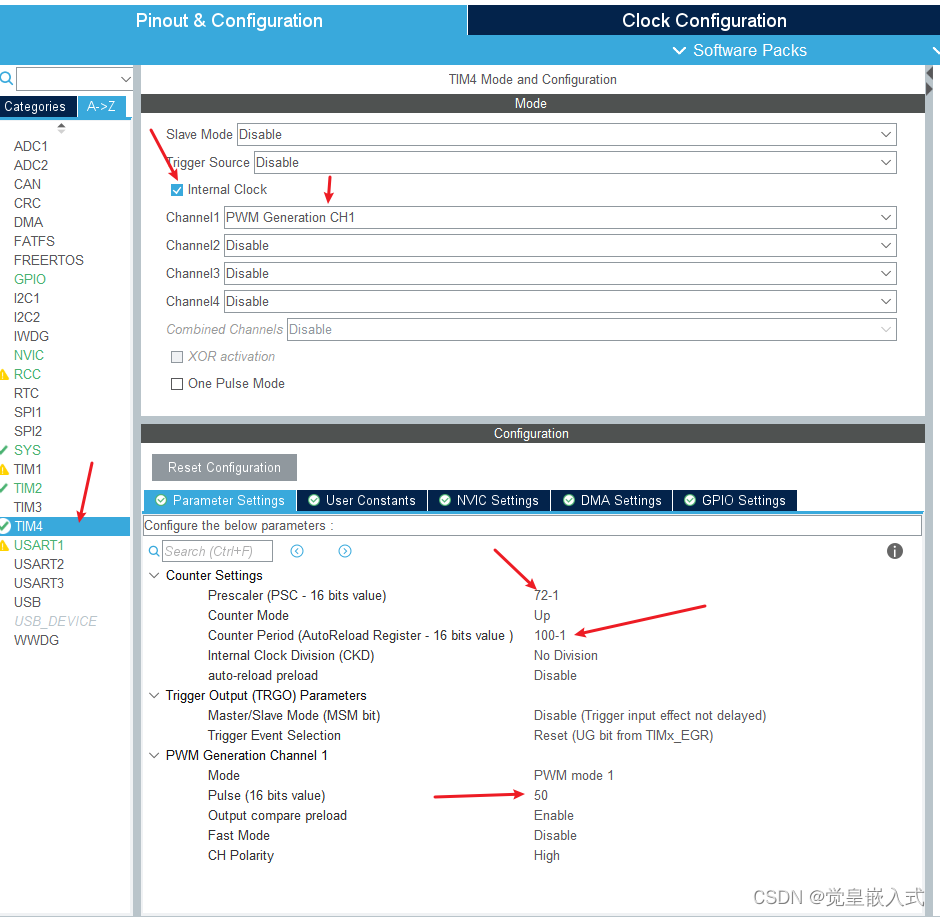
2.2 PWM输出配置
想要测试PWM输入功能对不对,那么首先要让定时器生成一路用于测试的PWM脉冲,这里我利用TIM4的通道2输出一个10KHz、占空比50%的PWM波,PWM输出到PB6引脚上:
定时器分频系数设置为72,72MHz/72=1MHz的计数频率,重载值设置为100,则1MHz/100=10KHz的计数频率。
因为将重载设置为了100,设置脉冲0~100的范围就正好是占空比0%至100%。
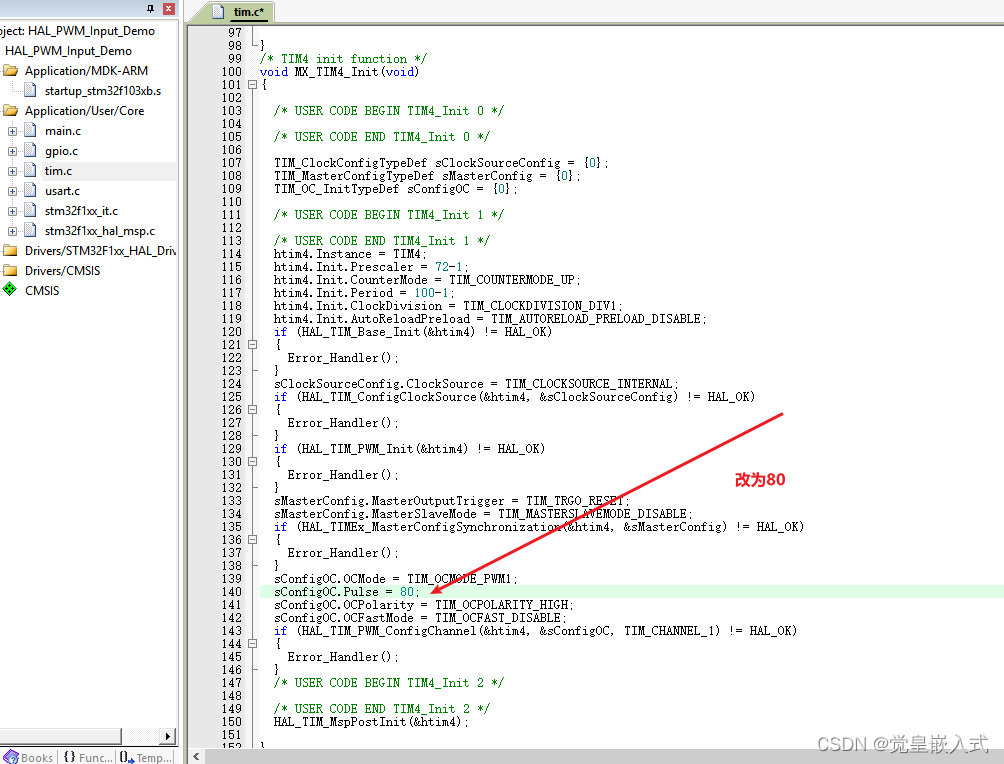
Pulse设置的是有效电平的时间,
将Pulse设置为50,有效时间正好占用一半,此时的占空时间也就是50,占空比就为50/100=0.5=50%
如果将脉冲设置为80,那么有效时间是80,占空时间就是20,占空比就为20/100=0.2=20%
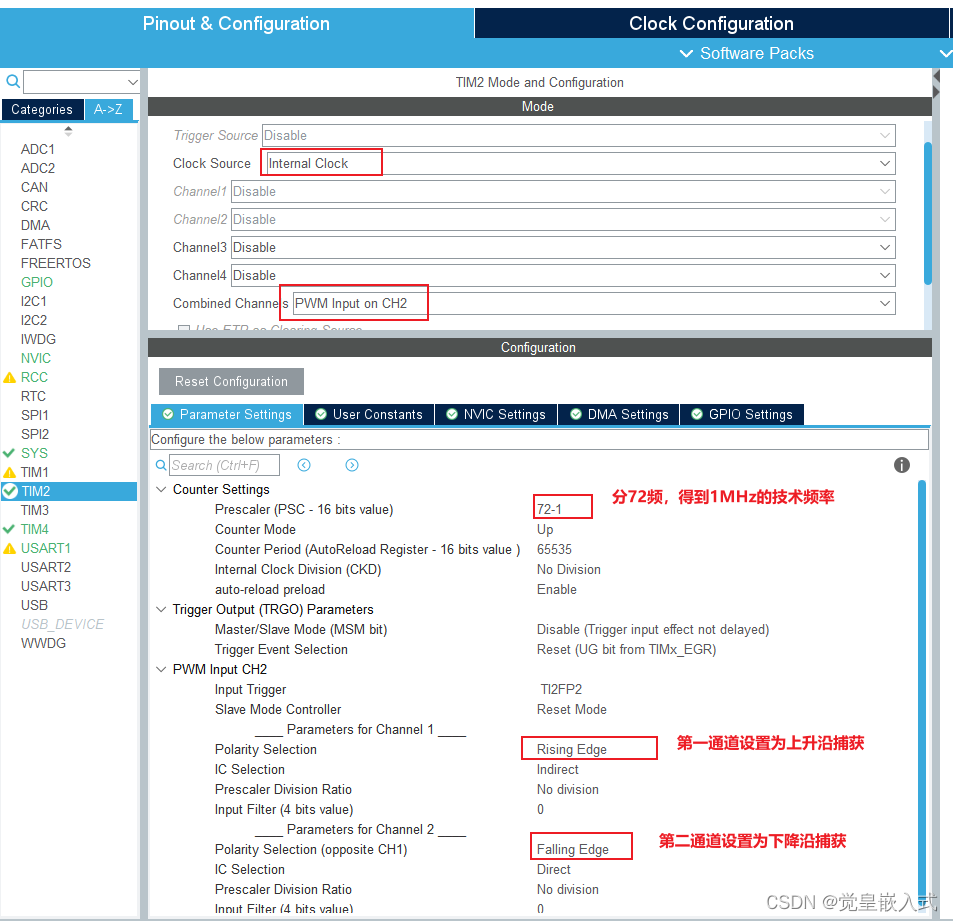
2.3 PWM输入捕获配置
将TIM2配置为PWM输入模式,我是使用的PWM输入通道2,也就是PA1引脚。
PWM输入模式开启后,会使用到通道一和通道2,一路用于捕获上升沿、一路用于捕获下降沿,这里要注意!
设置为72分频得到1MHz的计数频率,TIM2计一个数就是1us,这样设置比较好计算。
使能TIM2的全局中断:
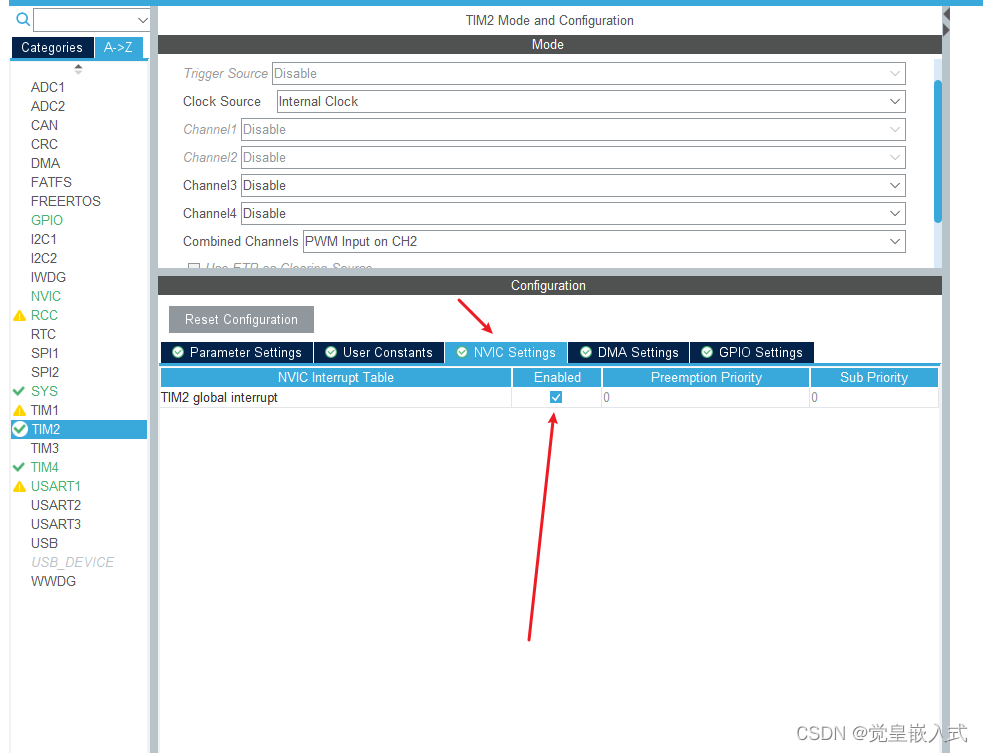
生成代码即可~!
3、程序修改和测试
uint32_t uiDutyCycle;
uint32_t uiCycle;
uint32_t uiFrequency;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == htim2.Instance)
{
switch(htim->Channel)
{
case HAL_TIM_ACTIVE_CHANNEL_1:
uiDutyCycle = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1); /* 占空比 */
break;
case HAL_TIM_ACTIVE_CHANNEL_2:
uiCycle = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_2); /* 周期 */
break;
default:break;
}
}
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM2_Init();
MX_USART1_UART_Init();
MX_TIM4_Init();
HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1); /* 使能定时器4通道1输出PWM波 */
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); /* 使能定时器2通道1的PWM输入捕获 */
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_2); /* 使能定时器2通道2的PWM输入捕获 */
while(1)
{
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
HAL_Delay(500);
uiFrequency = 1000000 / uiCycle;
printf("占空:%dus 周期:%dus 频率:%dHz \r\n", uiDutyCycle, uiCycle, uiFrequency);
}
}
int fputc(int ch, FILE* fp)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, HAL_MAX_DELAY);
return ch;
}
先用示波器接到PB6引脚上,看看TIM4输出的10KHz对不对:

验证后没问题,然后将PB6接到PA1引脚上。
再看串口输出的测量结果:
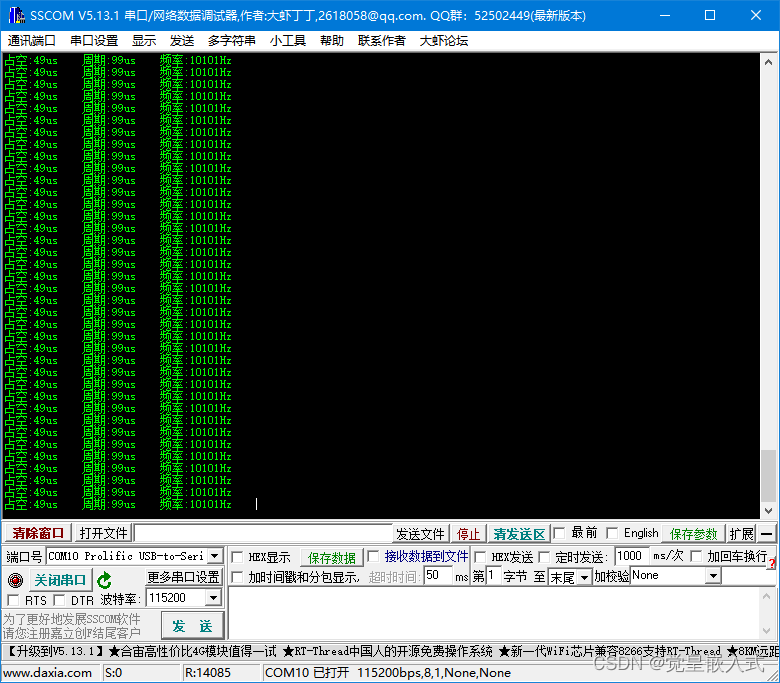
基本准确,但是存在误差!
在程序中将脉冲改为80,那么此时的PWM波,一个周期内的高电平时间是80,低电平时间是20,则占空比就是20%:
在看输出结果:
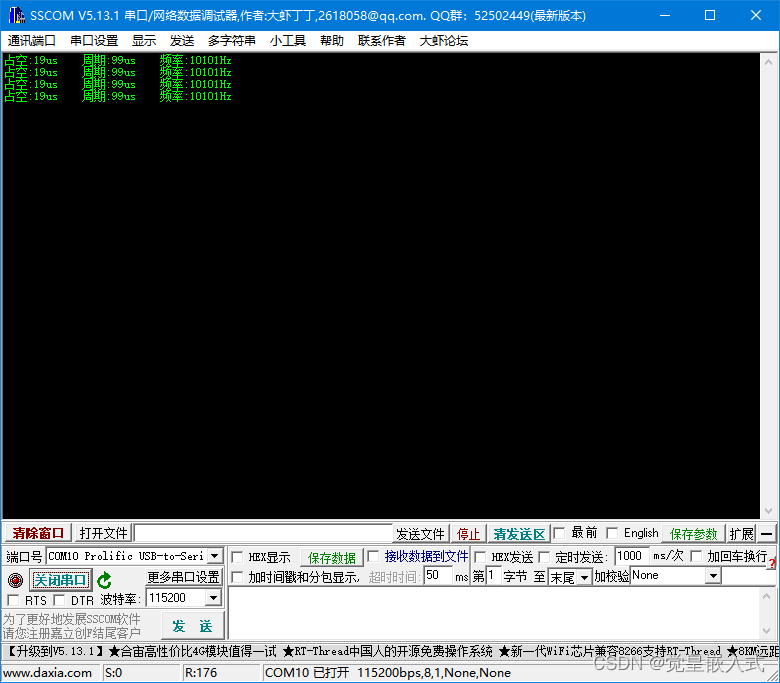
没问题,捕获的正确~!
ends…