创建用户自定义msg和srv文件
目录
创建用户自定义msg和srv文件
一、程序编写
1、创建软件包
2、创建msg消息和srv服务文件夹
3、定义msg消息示例
4、定义srv服务示例
5、修改和添加编译选项
6、软件包设置
二、程序测试
1、编译软件包
2、测试查询信息
3、测试查询服务
· 上一讲回顾,我们使用C++实现编写简单的服务器和客户端。里面使用消息定义和服务定义都是示例中的定义。本章节讲解我们如何自定义自己专用的消息和服务。废话不多说,开启代码之旅。
#include <std_msgs/msg/string.hpp>
#include <example_interfaces/srv/add_two_ints.hpp>一、程序编写
1、创建软件包
ros2 pkg create --build-type ament_cmake tutorial_interfaces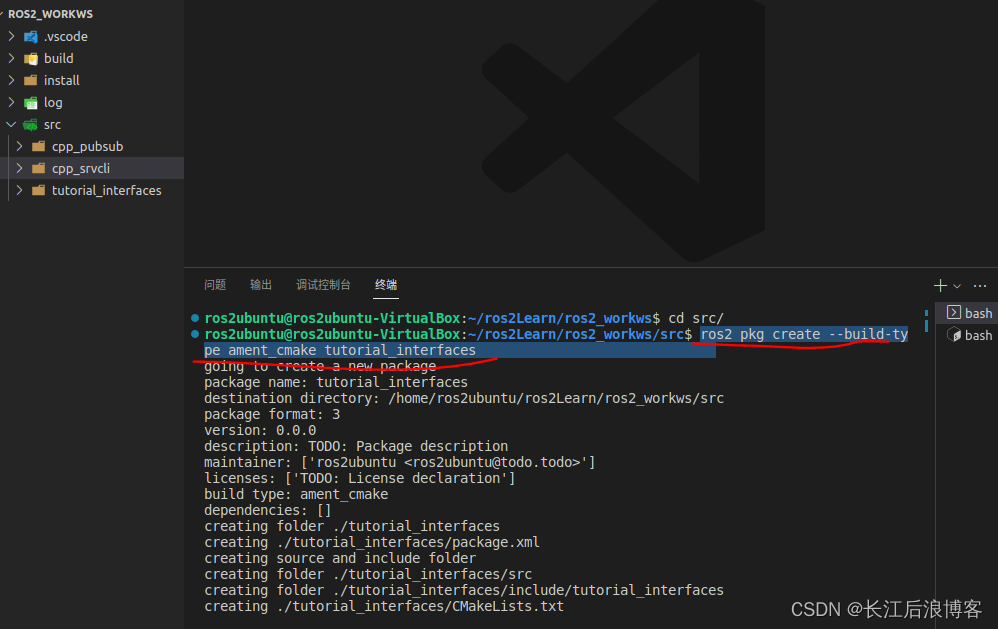
2、创建msg消息和srv服务文件夹
在软件包中创建两个文件夹:msg消息和srv服务文件夹
mkdir msg srv
3、定义msg消息示例
src/tutorial_interfaces/msg/Num.msgint64 num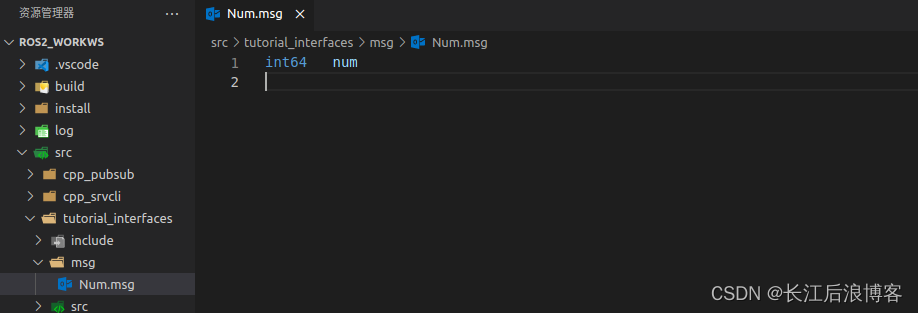
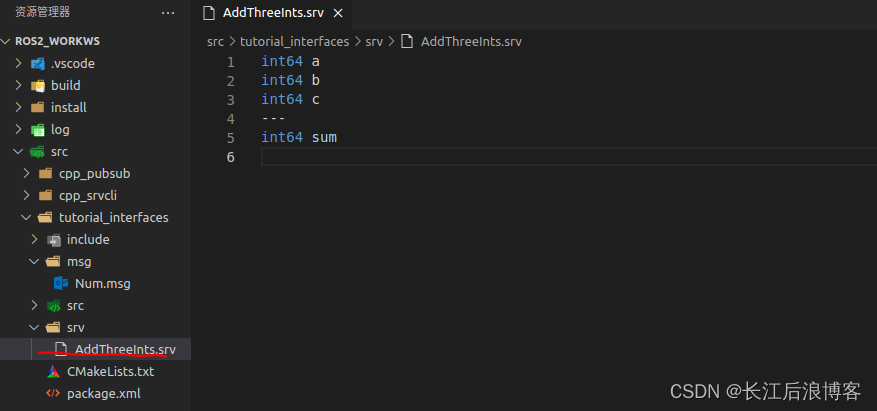
4、定义srv服务示例
src/tutorial_interfaces/srv/AddThreeInts.srvint64 a
int64 b
int64 c
---
int64 sum
5、修改和添加编译选项
cmake_minimum_required(VERSION 3.8)
project(tutorial_interfaces)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rosidl_default_generators REQUIRED)
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/Num.msg"
"srv/AddThreeInts.srv"
)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
6、软件包设置
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>tutorial_interfaces</name>
<version>0.0.0</version>
<description>defined msg and srv</description>
<maintainer email="motion_gui@126.com">gmotion</maintainer>
<license>Apache License 2.0</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<build_depend>rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
二、程序测试
1、编译软件包
colcon build --packages-select tutorial_inter2、测试查询信息
. install/setup.bash
ros2 interface show tutorial_interfaces/msg/Num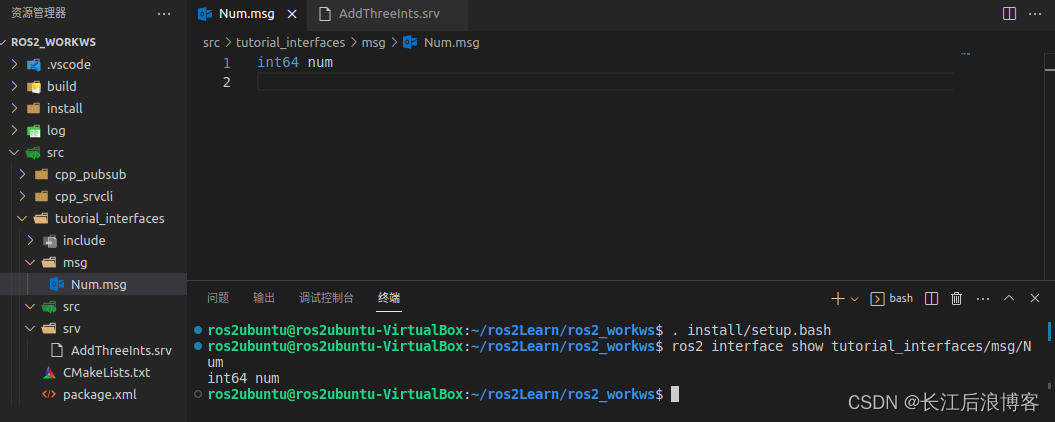
3、测试查询服务
. install/setup.bash
ros2 interface show tutorial_interfaces/srv/AddThreeInts 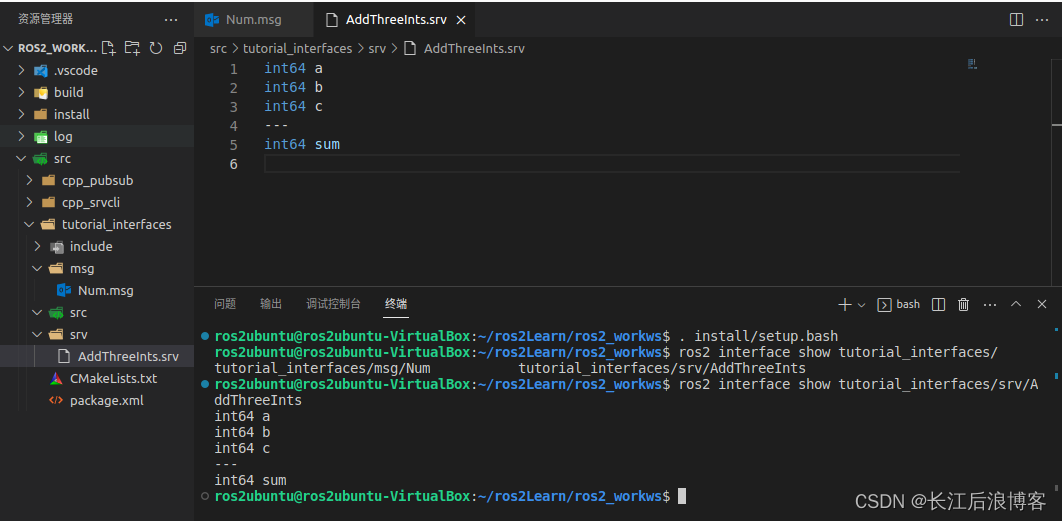
4、其他软件包引用问题
需要在对应的软件包引用此软件包。软件包引用后才能头文件包含目录
<depend>tutorial_interfaces</depend>消息和服务正确发布出来,这章节就不做带入代码编程,在下一章节中进行叙述。谢谢大家的阅读,下一章节我们再会。谢谢大家。。。