论文信息
题目:
Dynamic SLAM Based on Planar Features
基于平面特征的动态SLAM
论文地址:
https://ieeexplore.ieee.org/abstract/document/9834113
发表期刊:
2022 7th International Conference on Automation, Control and Robotics Engineering (CACRE)
标签
静态语义特征提取、基于平面的语义特征
摘要
为解决动态环境下传统的及时定位与地图构建(SLAM)算法会降低位姿估计精度和系统鲁棒性的问题,提出一种适用于动态环境的视觉惯性SLAM系统。文中设计了一种结合注意力机制的编码器-解码器结构的平面分割网络scSE-PlaneNet。scSE PlaneNet用于为后续的SLAM系统提供静态平面特征。然后,利用平面单应性原理计算得到的误差加速位姿优化;在ADVIO数据集的多个序列上进行了实验,结果表明,与当前最先进的VINS-MONO系统相比,所提出的方法可以获得更高的相机位姿估计精度。
内容简介
本文使用语义分割来检测平坦、稳定、大面积、无处不在的平面特征,而不是可移动的先验动态类别。另一方面,利用平面单应性构造语义分割网络的部分代价函数,实现几何信息和语义信息的紧耦合。
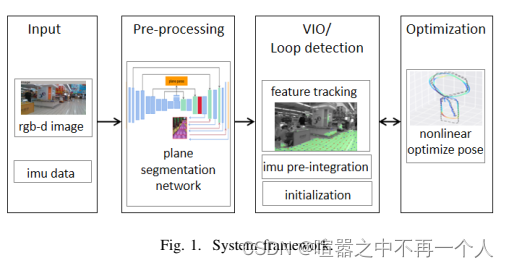
视觉-惯性系统可细分为图像预处理、视觉-惯性里程计和后端优化3个部分。图像预处理部分主要是利用基于scse的平面分割网络从输入图像中提取平面掩模。视觉-惯性里程计部分主要利用平面掩模图像跟踪静态特征,通过相机和IMU数据的紧耦合进行位姿估计。后端优化部分主要通过非线性优化方法进行位姿优化。
评价
所提出的scSE-PlaneNet网络可以在室内或室外场景中实现平面分割。通过将网络分割得到的平面信息应用到VISLAM系统中,使VISLAM系统尽可能只基于静态特征进行姿态估计,从而实现VISLAM在高动态场景中的精确定位。由于数据集的限制,该系统仅使用SYTHIA数据集来训练平面分割网络。这使得训练的平面分割模型不一定适用于与SYTHIA数据集有较大差距的场景。
该系统的主要贡献包括:
•设计并构建了scSE-PlaneNet平面分割网络,负责为后续的SLAM提供静态平面特征。
•采用基于平面单应性约束的重投影误差来增强SLAM后端的非线性优化。
•成功构建了适用于动态场景的视觉惯性SLAM,提高了VISLAM算法在动态场景中的定位精度。
阅读总结
文章提出的问题:
1、传统语义分割都是对动态目标进行分割,会导致分割不准确的问题
2、大多数的语义+几何信息方法都是松耦合
文章提出的解决方法:
1、设计了基于scSE-PlaneNet的平面分割网络,来提取静态平面特征,然后投喂到SLAM系统
我认为该方法还是比较可靠的,在前端只提取静态特征点来进行定位,在动态特征点不多的情况下定位精度肯定有所提升,但是我感觉该文章还有更多值得挖掘的地方。比如,将几何约束与静态语义信息相结合,来避免动态特征点过多,语义信息不足的问题。最近好多创新点哈哈哈,是不是有进步了