学习高飞博士的路径规划课程所总结的学习笔记。
目录
1、配置空间(Configuration Space, C-space)
2、图(Graphs)
3、图搜索(Graph Search Basis)
3.1、总体框架
3.2、两种基本的图遍历算法
3.3、启发式搜索(Heuristic search)
3.4、移动的代价
1、配置空间(Configuration Space, C-space)
首先解释一下机器人的工作空间这个概念,机器人的工作空间是指机器人所能达到的空间点的集合,在此空间中,机器人是有大小和形状的,因此很难进行运动规划。
配置空间是学习路径规划的基础,绝大多数路径规划算法都是基于配置空间提出的。如下图,配置空间中,机器人将变成一个质点,而机器人本身的大小和形状将会与障碍物做一个结合,以便进行碰撞检测。

图1-1. 圆形机器人的工作空间与配置空间

图1-2 方形机器人的工作空间与配置空间
图1-1和图1-2是两种简单的机器人在配置空间中的表示。需要注意的是,因为机器人在工作空间中可能存在多个自由度,这时候将其转换到配置空间就会变得很复杂。因此,实际上经常采用近似的表示方法,即将机器人看作一个球体,然后再到配置空间中以球体半径为长度膨胀所有障碍物,如图1-3。

图1-3. 无人机的配置空间
2、图(Graphs)
图是有节点和边的表达方式,节点与节点之间的关系:
1)无向:机器人可以在任意连接的节点之间移动。
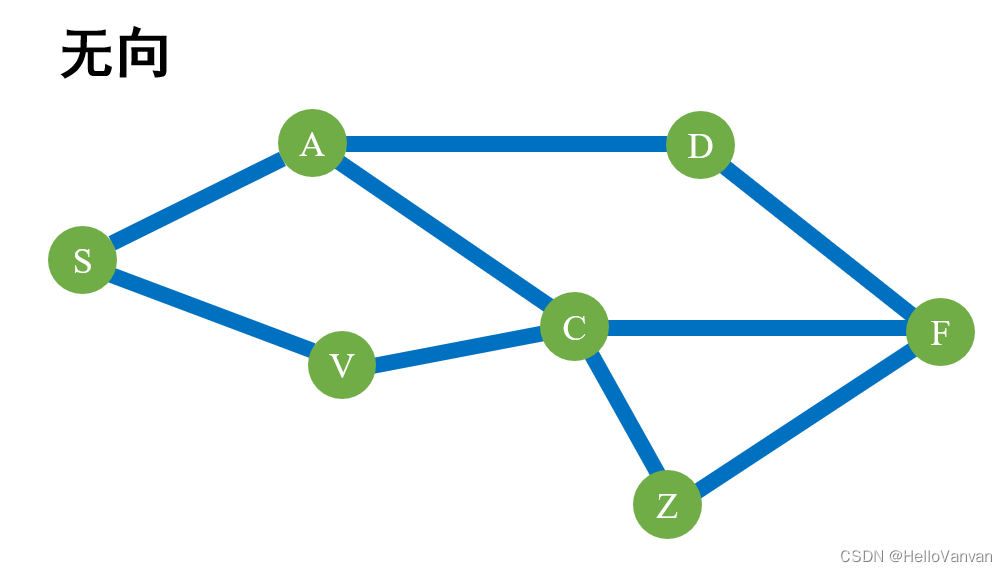
图2-1. 无向示意图
2)有向:节点与节点只能根据箭头方向移动,例如图中机器人可以从节点S移动到节点A,但不能从节点A移动到节点S。
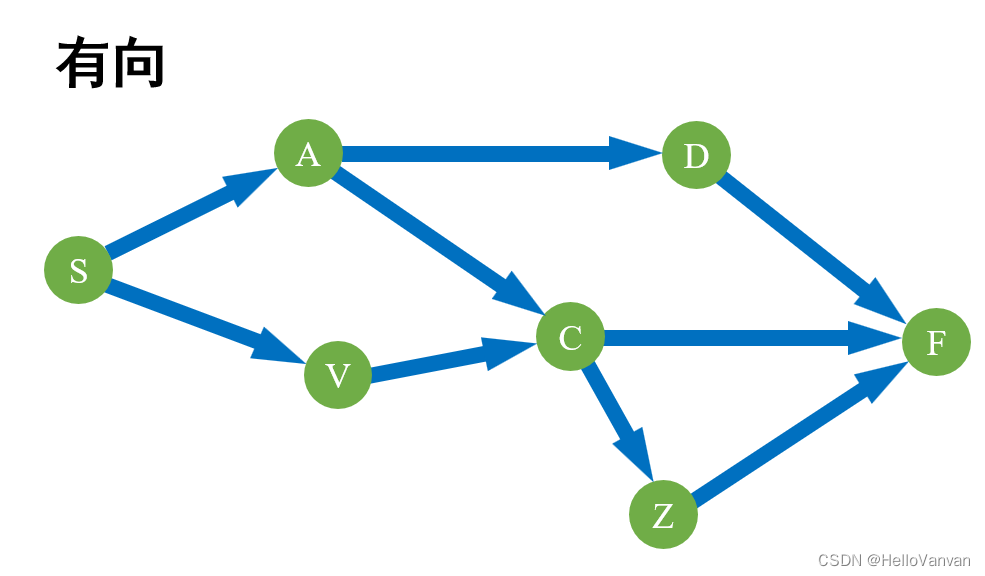
图2-2. 有向示意图
3)权重:机器人在节点间移动的代价,代价可以是机器人移动的距离,也可以是机器人移动需要消耗的能量、时间等,可以根据问题自定义。
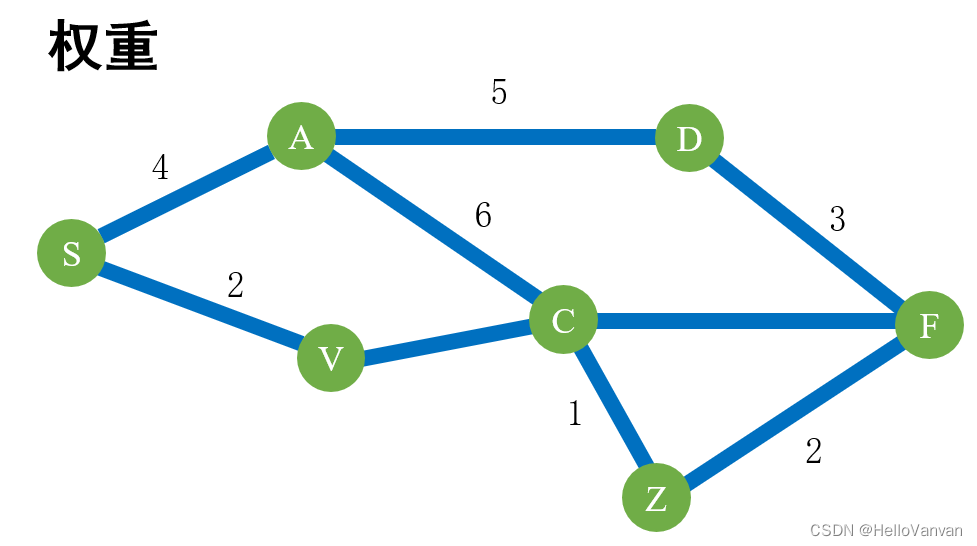
图2-3. 权重示意图
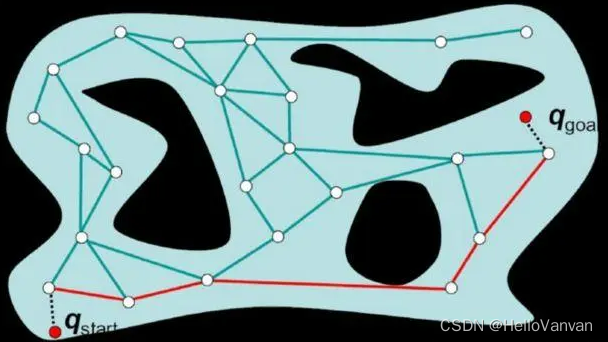
对于任何一个路径规划的问题,必须先人为构造一个图。以下为两种常用地图:图2-4(a)为栅格地图,栅格地图每个节点之间天然形成了连接,栅格地图是基于搜索的路径规划方法用的地图;图2-4(b)为基于采样生成的地图,本身是只有障碍物而不具备任何节点,需要基于采样生成节点然后连接生成地图,是基于采样的路径规划方法用的地图。

(a) (b)
图2-4. 两种常用地图。(a)栅格地图,(b)基于采样生成的地图
3、图搜索(Graph Search Basis)
3.1、总体框架
- 建立一个容器,这个容器用以包含所有要访问的节点;
- 容器由初始节点进行初始化;
- 循环过程:
- 根据预先设定好的目的或指标弹出一个节点(访问一个节点);
- 拓展:获取所有该节点的相邻节点;
- 将这些相邻节点储存到容器中。
- 结束循环。
两个问题:
1、什么时候结束循环?
两种可能:a)当容器是空的时候会结束循环;b)得到目标路径。
2、如果图是循环的那该怎么办?(两个节点互通)
为了防止死循环,可以新建一个容器,这个容器会包含所有已经被访问过的节点,这些节点不会被再次访问。
3.2、两种基本的图遍历算法
1)深度优先搜索(Depth First Search,DFS):后进先出(LIFO)

图3-1. 深度优先搜索示意图
特点:每次访问都会优先访问容器中(如图3-1中的栈)最深(后)的节点。通俗地讲,深度优先搜索会一条路径搜索到底(深),没有找到目标则回溯再搜索其他路径。

图3-2. 搜索示意图

图3-3. 深度优先搜索流程
举例:假设S为起始节点,G为目标节点。图3-2、图3-3中,容器首先由初始节点S初始化,随后弹出S进行拓展有A、V,按照某种规则将它们依次放入容器中(假设先入A),则容器中有V、A;弹出V,进一步拓展有C、F,按照某种规则依次放入容器中(假设先入C),则容器中现有F、C、A;下一步弹出F,无拓展则回溯;之后弹出C,拓展可得Z,放入容器中;弹出Z,Z拓展有G,G为目标节点,则循环结束,返回该路径SVCZG。事实上,可以看出SADG才是最短路径,因此,深度优先搜索找到的路径可能不是最优解。
动图展示:

2)广度优先搜索(Breadth First Search,BFS):先进先出(FIFO)
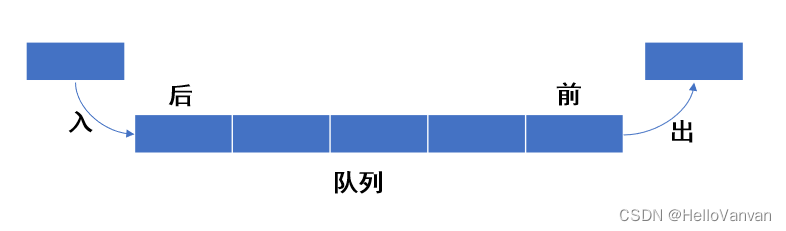
图3-4. 广度优先搜索示意图
特点:每次访问都会优先访问容器中(如图3-4中的队列)最先进入的节点。通俗地讲,广度优先搜索会如图3-5中的树状图一层一层地搜索完,直到找到目标。

图3-5. 搜索示意图
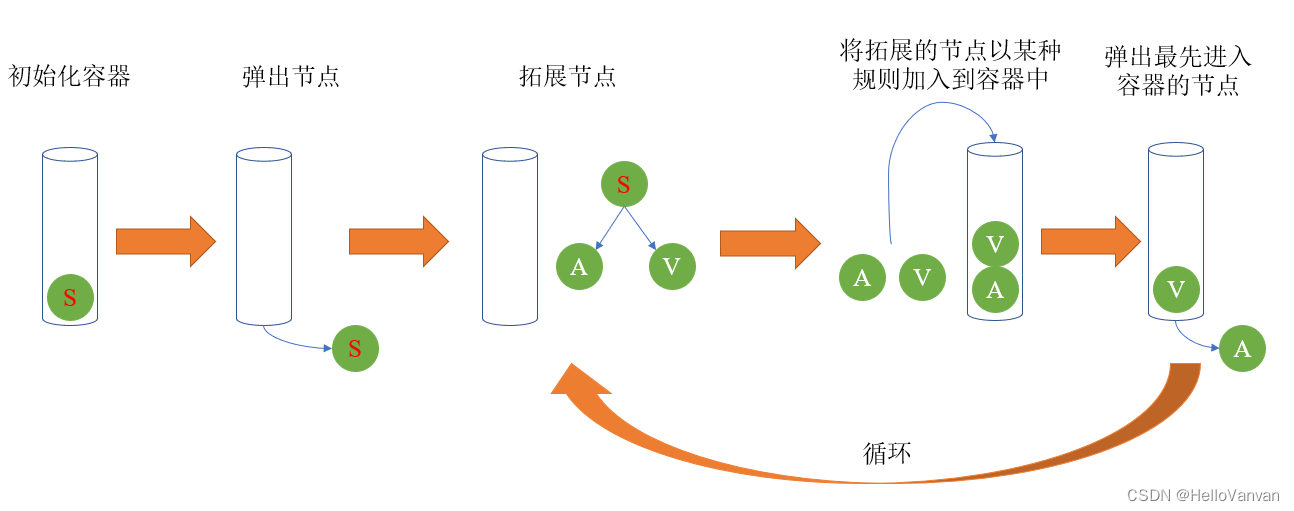
图3-6. 广度优先搜索流程
举例:图3-5、图3-6中,可以看出,与深度优先搜索从容器顶部弹出节点不同,广度优先搜索是从容器底部弹出节点的。容器首先由初始节点S初始化,弹出S进行拓展有A、V,按照某种规则将它们依次放入容器中(假设A先入容器),则容器中有V、A;弹出A,拓展有C、D,按照某种规则依次放入容器中(假设C先放入),则此时容器中有D、C、V;下一步弹出V拓展可得C、F,按照某种规则依次放入容器中(假设C先放入),此时容器中有F、C、D、C;弹出节点C,……。如此循环直至搜索到目标G这一层则结束循环返回路径。按图3-5来,则会在ZGZ这一层结束循环,返回路径为SADG,该路径为最短路径。广度优先搜索会找到全局最优路径。
动图展示:

以上可以看出,深度优先搜索和广度优先搜索都是遵循3.1中的总体框架进行的。
3)广度优先搜索VS.深度优先搜索:使用哪一种?
上述动画展示可以看出,按照两种搜索方式的特点,广度优先搜索更有利于找到最短路径,因此将广度优先搜索作为图搜索的基础。
3.3、启发式搜索(Heuristic search)
前面提到的深度优先搜索和广度优先搜索是按照FIFO或者LIFO的方式将节点弹出容器。启发式搜索(贪心算法)与这两种不同的是,它弹出节点的方式是靠自定义的规则弹出的,这种规则称为启发(Heuristic)。启发的本质是猜测目标节点与当前节点有多近。注意这里说的是猜测,因为搜索过程中无法知道目标节点与当前节点的距离。如图3-7,一般合理的猜测有:1)欧式距离(Euclidean Distance),即两个节点间的距离(忽略障碍物);2)曼哈顿距离(Manhattan Distance),即两个点在标准坐标系上的绝对轴距总和。启发会引导节点到正确的方向,但必须容易计算,否则反而降低搜索效率。
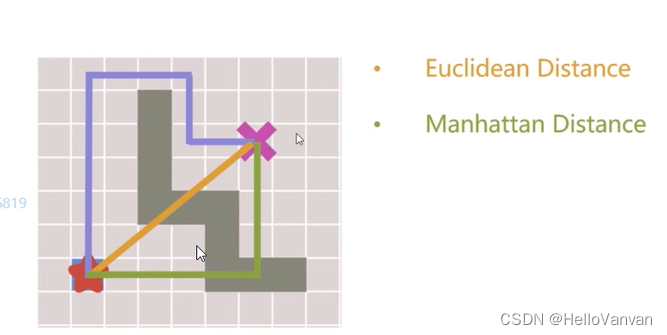
图3-7. 欧式距离与曼哈顿距离的示意图
动图展示(无障碍物):

Greedy Best-First Search Breadth First Search
动图展示(有障碍物):

Greedy Best-First Search Breadth First Search
总结:启发式搜索(贪心算法)在无障碍物的情况下可以快速地得到最优全局路径,具有很强的目的性,会优先拓展离终点更近的节点;相对应地,广度优先搜索算法是层层递进地找最优全局路径。然而,实际中是有很多障碍物的,在这种情况下,广度优先搜索算法虽然花了更多的时间找到路径,但所找到的路径是最优的;启发式算法快速地找到了路径,但所找到的路径确是次优的(局部最优)。这是因为启发式算法在估计当前点到终点的距离时是忽略障碍物的。
3.4、移动的代价
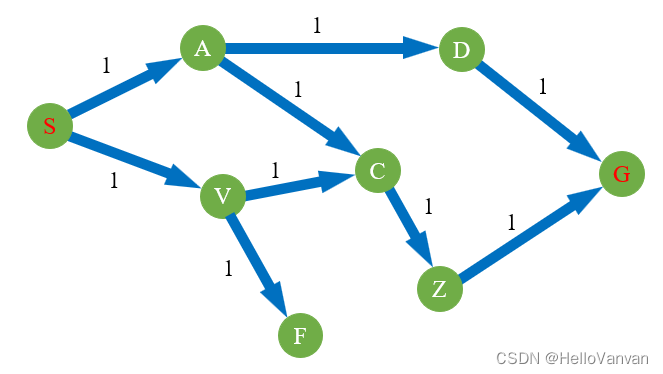
图3-8. 深度优先搜索/广度优先搜索地图
事实上,深度优先搜索与广度优先搜索使用的地图节点间的边是有权重的,且所有边的权重是相同的,如图3-8。在这种地图上,深度优先搜索与广度优先搜索才能成功实施。然而,对于一个机器人搜索问题,地图上节点间的边权重通常都是不同的。对于这种情况,则需要其他算法来进行搜索,例如:Dijkstra和A*等,在下篇笔记中会分析。
此处给出两个路径规划算法可视化的网址,以便理解:
1、PathFinding.js
2、Pathfinding Visualizer
注:以上部分图片截取自高飞博士课件,高飞博士的教学视频(Motion Planning for Mobile Robots)可在深蓝学院中找到。
(转载请标明源地址)