导言
目前轨道系统中最常见的便是基于通信的列车控制系统(Communication Based Train Control, CBTC),其中各集成商各条线路采用了不同级别的自动化技术,本文将针对CBTC的运用,从其系统组成、系统升级改造、系统主要功能、自动化等级以及系统性能评估这几个方面来介绍城市轨道交通的自动化技术。
1、自动化列车控制系统技术的背景与特点
随着城市化的进程全世界越来越多的人涌向城市,预计到2050年前后将有三分之二以上的人口居住在城市里。为了满足这部分人口的生活、住房和工作等的需求,必须保障城市交通的可持续发展,其中由公共汽车、无轨电车、有轨电车、地下铁道等运营系统构成的城市公共交通系统因其运送效率高、节约能源等优点扮演着重要角色。
在现代大城市中,快速有轨电车和地下铁道等系统逐渐发展成为城市交通的骨干。尤其是地铁系统不占用地面资源,可在地下高速运行,同时它载量大、能源消耗低、相对准时,已成为了现代大城市中上班族通勤的首选交通工具。综合利用地下铁路的配套资源,提高单条地铁线路的运力和效率,是目前地铁发展的首要任务。本文将着重介绍目前地铁中最常见的列车控制自动化技术,下图展示了自动化列控系统中运营效率相关的基本参数。
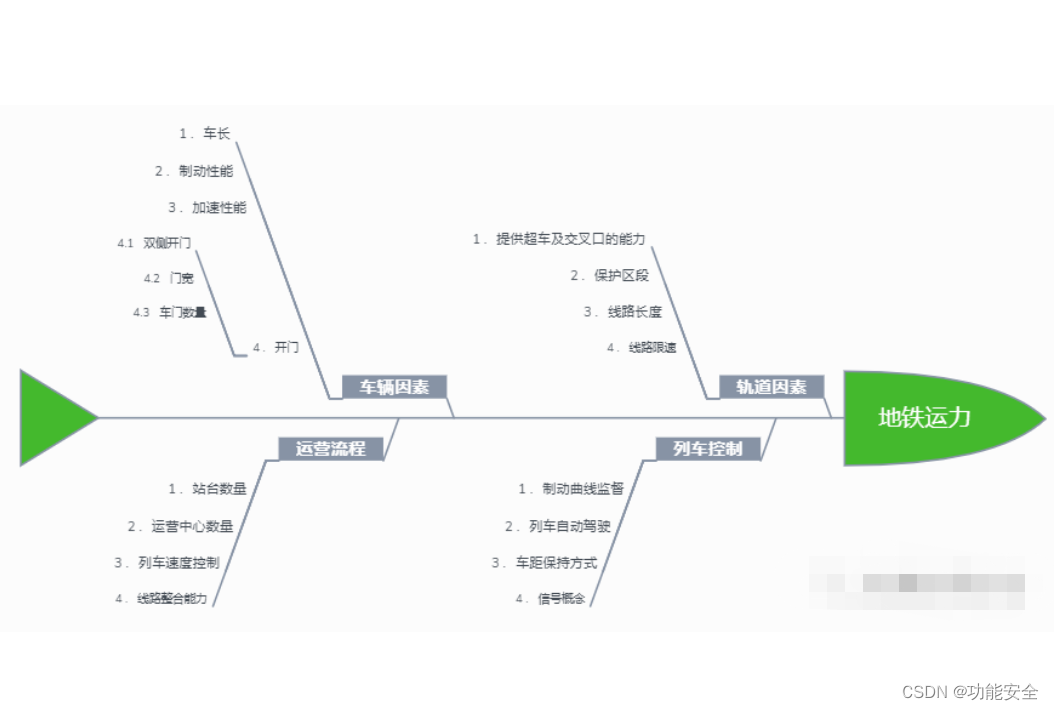 地铁运力影响参数
地铁运力影响参数
在城市快速轨道交通中,自动化的列车控制技术有以下几个显著优点:
运力增大:首先通过对每个危险点之前的连续制动曲线监督,相比传统铁路可以大大缩短保护区段的长度;如此可以减少列车的跟车时间,因而单条线路的运营能力得到提高;通过移动闭塞技术可以进一缩减列车的跟车时间,即乘客的等车时间。
弹性资源利用:对于自动化列车控制的最高等级无人驾驶UTO来说,乘客需求和车辆投入可以高效融合,根据不同时间的客流量需求向线路投入不同数目的列车,从而避免不必要的空车运营。这也是使用无人驾驶技术的最初目的。
经济性:从经济学的角度我们需要考虑自动化列控系统的建设成本(capital expenditure, CAPEX)和运营成本(operational expenditure, OPEX),一般来说自动化列控系统的寿命周期远大于传统的信号系统,单次的建设投资可以保障更长的运营年限;同时自动化列控对有效降低运营成本、减少列车耗能等有很大积极作用,更贴合客流量需求的运力投放也能极大降低线路的运营成本。
2、自动化列控系统组成与系统的改造升级
现今世界各地新建的地铁线路都选择装备自动化列控系统,而运营多年的线路也在逐步的实施系统自动化改造,以提高线路运营能力,增强地铁在城市公共交通领域的竞争力。旧线改造是在线路运营的同时进行既有系统的转换升级,同时涉及到建设与运营的方方面面。例如纽约、巴黎、香港等大城市的地铁线路改造,相比新建线路,地铁系统的自动化升级改造面临着更多的技术难点。本章节首先介绍自动化列车控制系统的组成,然后根据系统需求等引出地铁系统改造的具体内容。
2.1、自动化列控系统组成
总的来说,自动列控系统由以下几个不同部分组成:
车载设备:车载计算机是车载设备的核心,它是列车在不同自动化等级下运营的基础。
车载设备接收来自轨旁的应答器位置、道岔位置、停车点、线路限速等信息,最终收到轨旁综合计算给出的移动授权,从而列车在连续监督下安全行驶。具体的,车载设备还包括以下组件:
驾驶室信号:通过驾驶室信号司机/车辆接收当前所允许的驾驶行为及自动化等级,当降级到人工运行时,司机需对列车的安全负责。通过驾驶室信号可以省略轨旁的信号机设备。
测距测速设备:列车需向轨旁周期性地传输列车位置,列车通过冗余的异构的传感器来实现列车的测速与测距,并结合线路上的固定应答器来提高其测量精度。
接收与发送装置:列车与轨旁连续的信息交换由车载的接收/发送装置来保障,即周期性地接收轨旁发来的移动授权等信息,并周期性地向地面报告列车位置。
轨旁设备 :
轨旁设备在其管辖区域内监督相关现场设备,包括传统的联锁设备或者高度集成的CBTC系统设备。轨旁子系统根据列车位置、危险点、轨道空闲、运营限制信息等计算出移动授权,并周期性发送给管辖区域内的列车。
列车监控系统ATS:
自动化的列车监控( Automatic Train Supervision, ATS)实现对自动化轨道线路的全面监控,包括列车、轨旁设备以及通信网络。ATS通过例如停站时间的控制、临时限速和越站等调度方式来协调线路的运营,保障系统准点高效运行。同时,它还会借助SCADA(Supervisory Control and Data Acquisition)或者PIS(Passenger Information System)等系统来辅助其运行。
数据通信系统DCS:
数据通信系统的任务是保障CBTC系统内双向的可靠的安全的通信。当前使用的较多的是WLAN(Wireless Local Area Network)和LTE(Long Term Evolution)无线通信系统。然而,传统的硬线导体传输也有其优势,例如更大的带宽,安装与维护更简单等。
2.2、自动化列控系统的改造升级
系统的升级改造,即向高自动化等级改造,如传统的有人人工驾驶通过对现有设备的改造以及新技术新设备的运用最终升级为无人驾驶的自动列控系统。除上一小节所述的基本系统组成外,基于通信的列车控制系统(CBTC)改造升级还包括以下几种具体形式:
乘客信息系统
乘客是交通企业努力提高运营服务质量的核心。自动列车控制系统的技术基础是精确的列车定位信息。而实时的乘客信息系统也可以充分借用这一精确的列车定位信息;双向的通信通道也向乘客信息系统提供了一些新功能(非安全)的可能性,例如车内车站视频、等待时间告知以及其他给乘客的临时通知等。
建筑设备自动化
轨道交通系统的状态信息应可在站台及轨行区等位置实时获得,尤其是那些安全相关的信息应及时传输给CBTC系统,以使CBTC系统能做出及时的响应,例如:火灾报警装置、隧道逃生设备、站台门防夹防跌落设备、紧急停车按钮
自动列车驾驶
自动列车控制给列车自动驾驶提供了接口,在高自动化等级的运营中,除了必须处理的列车牵引与制动行为、开关门策略外,诸如列车障碍物识别、脱轨检测、站台门区域防乘客摔落、乘客触发的紧急停车等技术也应加入到列车自动驾驶中来,以代替传统的司机人工驾驶。
轨道基础设施设备
首先应保障轨道系统的限界安全,当外界物体侵入时,系统能有效识别并做出及时反应。同时隧道应有防洪防淹的能力,不得威胁到地铁列车正常行驶;某些情况下交通管理部门也可对隧道的通风条件、轨道断裂识别等提出具体的技术要求。
列车牵引电力供应
正常运营中,应保证列车的连续牵引电力供应;当然故障情况在系统设计中也必须被考虑,如当供电系统发生故障时,应至少保证隧道内的高压设备对从下车处到安全逃生口的路线上的乘客无任何人身安全威胁。
系统维护维修
不管是自动化列控系统还是整个轨道交通系统的自动化运营,其对系统的可用性都有很高的要求。当系统某组件故障并对系统正常运行产生影响时,需要尽快的识别故障并维修或更换相应组件,以使系统恢复常态运行。系统服务与诊断技术可以有效解决这一问题,并且运营人员和技术售后人员都应当熟悉这套系统。
3、自动列控系统的主要功能
本章节将介绍自动列车控制系统的安全功能需求。它们包括列车运行安全,列车驾驶安全,以及乘客上下车的安全监督;在高等级的自动列控系统中例如无人驾驶UTO中,对于限界的安全将会有更高的要求,同时有更多功能来实现故障识别与故障管理,保障自动列车运行的安全。自动列车控制因各国法规等的差异会涵盖大量的不同的功能,以下将列出其典型的安全功能。
3.1、列车运行的安全功能
列车运行安全由以下多个顶层功能实现,
列车路径安全
保障列车路径安全,则应像传统的铁路联锁技术那样满足进路的安全功能。公众号第一篇文章轨道信号是什么?中提到轨道安全技术最基本的任务就是防止列车的碰撞与脱轨,例如道岔的安全、轨道裂缝检测功能可以防止列车脱轨;列车的侧向防护、对向防护以及轨道限界的安全防护、轨道交叉口的防护可以防止列车与其他列车或物体发生碰撞事故。列车路径安全功能的目的就是保证列车在其专用空间内的行车安全。
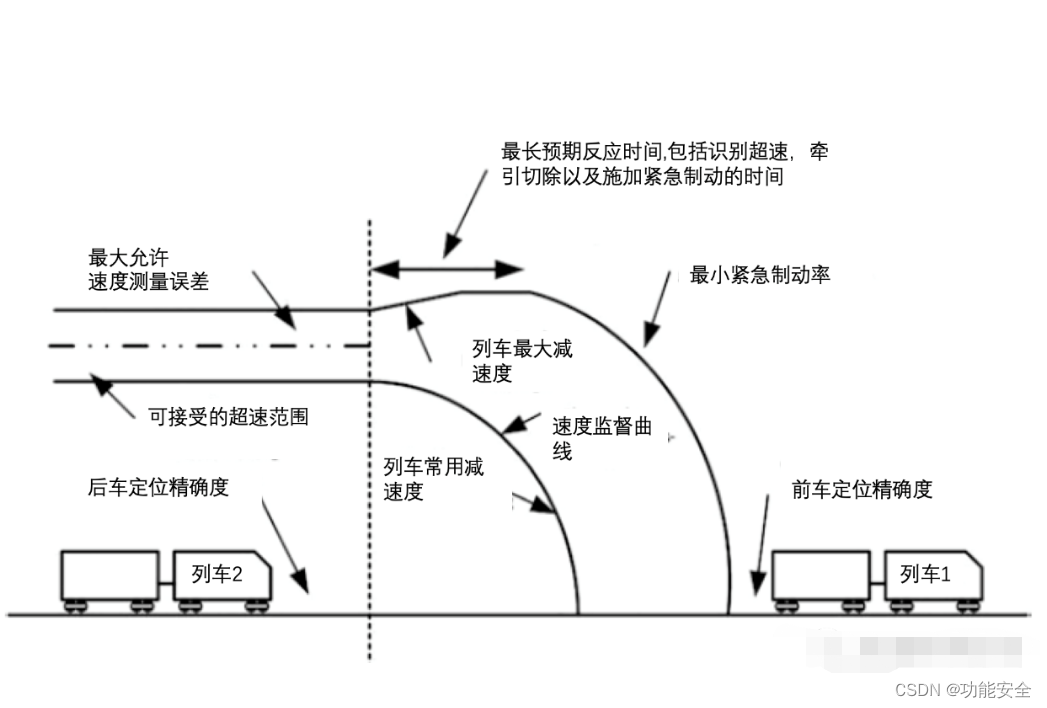
列车跟车安全
CBTC系统支持列车在移动闭塞区间内行驶,当前车突然制动停车时,应能保证后车及时反应并制动停在前车后而不发生碰撞。这就需要CBTC系统及时向列车传输进路空闲及移动授权终点的信息。轨道定位的精确度、前车是否是CBTC装备列车、轨道是否装备CBTC设备以及轨道物理逻辑区段的定义等等这些都是跟列车跟车安全功能相关的技术定义。
列车速度安全
列车在不同区段内的速度限制也是为了防止列车脱轨与碰撞事故的发生,CBTC内普遍的技术方法是向列车传输的移动授权内包含速度限制的报文信息。列车速度安全功能首先需要定义静态速度曲线和动态速度曲线两个概念:
固定线路相关的速度限制值我们成为静态速度曲线,而由列车相关(如车长、制动特性、测速测距误差等)以及CBTC系统相关(如系统通信延时、反应时间等)的参数计算出的速度限制值则称为动态速度曲线。
CBTC装备列车的安全制动曲线监督
其中,该功能应使列车在允许的范围内以规定的速度行驶,列车精确测速测距的能力是其前提条件。我们都知道误差可分为随机误差与系统误差,例如车轮的空转打滑会导致测速的随机误差,而长期的车轮磨损或更换车轮则会带来测量的系统误差。为了提高相应的定位精确度,CBTC系统中采用了如车轮里程表、雷达测距等几个传感器相结合的技术。如下图,随着列车行驶距离的增加,测量误差也随之增大;使用重定位点让这些传感器重新测量重新计算,那么如固定应答器之间的距离设置也代表了系统允许的测量误差范围。
3.2、列车驾驶功能
列车驾驶功能指的是列车驾驶模式的确定以及各工况下对列车的控制功能。
确定驾驶模式
轨道调度技术(CBTC中的Automatic Train Supervision, ATS)支持更优化的列车行驶速度,ATS根据当前系统运营状况选择相应的驾驶策略以期达到某方面的最优值。这种策略总体上可以分为省时为导向的和节能为导向的驾驶策略:
省时为导向的驾驶策略:在列车晚点到达本站的情况下,可以通过控制列车的停站时间或者到下一站的行驶时间(加速度、减速度、行驶速度)来减小本次晚点对全线运营的影响。ATS会将这种策略转换成相应的指令,传给司机驾驶室或直接传给自动驾驶的ATO(Automatic Train Operation)子系统。见下方左图中上侧的速度-路程-曲线,列车的行驶速度基本贴合最大允许速度,列车使用完全加速和完全制动,有效减少了区间内的行驶时间。
节能为导向的驾驶策略:CBTC系统通过线路数据库识别轨道的线路拓扑(道岔、坡度和站台),借助这些数据并结合列车的实际驾驶速度,调度中心计算出最节能的目标驾驶方式并实时传给车辆。如图中上侧所示,列车巡航一定时间后进入惰性工况,最终在站台制动停车。很明显,这种驾驶策略需要更长的区间行驶时间;根据Rahn(参考文件8)的算法这种驾驶策略可以减少10%到20%的牵引能量损耗,同时这也能减少制动时车轮的磨损程度。
列车驾驶控制
对于列车的控制,可以将整个过程看作一个关闭的调节环路。向该闭环输入给定的目标距离和目标速度等,并实时测量车辆的行驶距离和行驶速度(定位功能),以期使不断调节后的实际值无限趋向于给定的目标值。其中,ATS应给出不同驾驶策略下的目标值,列车通过调节加速度、减速度和牵引切除来不断调节行驶速度以贴近各策略下的目标值。
3.3、乘客上下车监督功能
对于没有司机的自动驾驶,为保障乘客上下车的安全系统应至少包含以下功能;而对于低自动化等级的列控系统来说,因为司机的存在,部分功能可以交由司机人工实现。
门释放的控制与监督功能
安全的门控制需要满足以下技术要求:
列车按精确度要求精确停在指定的停车点;
列车能识别停稳状态;
列车有防溜逸的功能;
列车能按开门策略打开指定一侧的车门或两侧车门。
车辆的人员安全防护功能
在列车与乘客的耦合区域,应防止例如醉酒者、盲人等从站台跌落或闯入车辆限界而被列车撞击。目前国内普遍采用站台屏蔽门的方式来保障这些乘客在站台的安全;而国外在没有屏蔽门的情况下会采用该区域的红外监控,当列车离开站台10米以后才会将此红外监控功能关闭。
除乘客的人员安全外,还应保证工作人员在该耦合区域的安全,通用的做法是设置人员防护开关,将全线自动运行区域划分为不同的防护区域,保障各区域内运营人员的安全。
站台防跌落功能
尤其是无人驾驶必须保证乘客在站台边界的安全,防止乘客被夹在站台门或甚至是跌落到车门与站台门的缝隙中。有三种技术要求来实现这一功能:
避免列车过大的停车误差:通过列车的精确停车来减小列车车门与站台门之间的差值;紧急情况下,乘客也可安全的通过应急车门下车。
车门站台门故障对位隔离:车门与站台门之间能相互接收并发送彼此的状态,当某方发生故障时,车门/站台门能相应的隔离开并保持关闭状态。
车门与站台门间的距离限定:车门与站台门之间的距离应足够小而不会导致乘客意外情况下摔落到轨道上。
目前对于站台门在全自动驾驶系统中的应用需要其满足SIL4的应用要求,但传统的商用站台门采用PLC系统控制开关门,其安全性和可用性不能满足新技术的要求。通过加装一些硬件设备如红外探测的同时,需要对站台门的系统架构、安全可靠的平台、自检和冗余配备等提出具体的更高的要求。
3.4、限界安全监督功能
对于传统的人工驾驶的列控系统来说,司机对列车行驶中的限界安全负责,而在全自动无人驾驶中需要增加新功能的外部接口来替代人工的限界安全监督功能。
CBTC系统应避免列车在轨道区域内行驶的所有安全威胁因素:
机械条件(如防淹门侵入)
建筑条件(如不平整的轨道)
电力条件(如不合适的牵引电流)
其它暂时的行驶限制条件(如临时施工场所)
其它长期的行驶限制条件(如长期限速点)
以上这些限制条件应被及时识别并告知给控制中心,CBTC轨旁设备给出相应的通行和速度限制指令,车载系统接收这些指令并执行和监督可能的减速或紧急制动等。
限界安全监督功能也会保障侵入限界内的人员的安全,包括正线轨行区和站台区域、车辆段/停车场以及轨道尽头线等。列车紧急停在隧道内时,应保障人员疏散通道的安全。
3.5、列车自动运营功能
在高等级的全自动运营中,列车可自动上下线。根据线路实际的运力需要,在ATS的调度控制之下,全自动列车可在自动场段实现自主休眠下线或唤醒上线。全自动运营中需实时监督所有车辆状态,当出现故障列车时其能在指定地点自主下线。
未来列车自动运营功能还应使列车可在两站之间自动变更行驶方向,并根据线路载量实际需要,对单列车次自动进行增减车厢数量。目前由于各种技术限制,全自动运营暂未具备此功能。
3.6 、故障识别与故障管理功能
全自动无人驾驶运用中尤其重要的是,列车运行过程中故障的自动识别与相应系统组件等对故障正确及时的处理,或至少故障会报警给运营中心以使运营人员做出安全反应。以下列出了几种故障场景与处理方式:
火灾报警
全自动列车应装备火灾探测报警器,通过温度传感器与烟雾报警装置在规定时间内向运营中心报告列车火灾情况。设置专用的无线或有线火灾报警通道,使列车在火灾状态下立即停车疏散乘客或驶往最近的下一站再进行人员的疏散。
区间疏散逃生
区间疏散逃生与紧急停车功能相关,当列车因故障停在区间时,应保持该列车停稳,同时封锁该区间,防止同向及对向的列车驶入。轨道上的高压电也应被关闭,以使乘客安全的离开该区间。
轨道障碍物检测
首先全自动运营系统应能探测到侵入轨道限界的障碍物,列车及时施加人性的制动,使其能停稳在障碍物之前。
列车脱轨识别
列车脱轨的检测技术上可借助轴向的加速度传感器设备,当车轮的加速度未施加到轨道上时,传感器会发出列车脱轨报警,列车紧急停车并报告给运营中心采取相应的措施。
4、自动化等级
城市轨道交通系统是复杂的人-机-交互系统。在轨道交通行业的许多标准中都定义了自动化等级,其出发点都是针对不同等级的自动化程度需实现不同的功能。自动化等级越高,机器所实现的技术功能越来越多,而人需要参与的工作也越来越来越少。在最高等级的范畴内则可实现全自动运营–列车正常运营中不需要人的参与介入。
上文描述的各安全功能也对应到不同等级的自动化技术中,更高级别的自动化运营中,对轨道列车和信号系统等也提出了更高的要求。
4.1、目视运行
在这一级别中司机通过目视驾驶列车,对列车运行的安全负责。尤其是在道路与轨道混用的城市有轨电车系统中,司机依据轨旁的固定信号机及遵守相应的运行规则下驾驶列车,对列车运行安全负责。
4.2、有列车防护的人工运行
这一级别中增加了列车防护功能,司机持续负责控制列车的运行、停止、开关门和处理突发事件等。列车防护功能监督列车的安全运行。
4.3、半自动运行(STO)
在STO中列车自动运行和停车,自动控制列车的牵引制动,与低级别一样司机还需要在驾驶室中,控制列车关门和处理突发事件等。
4.4、有人看守的无人驾驶(DTO)
在DTO级别的运行中,司机无需再坐在驾驶室,但需要相应的列车助理员协助作业并对处理突发情况,当列车因故障而降级时,助理员需要接管列车并对列车安全负责。由于正常运营中无人驾驶,此级别必须具备限界安全监督功能。当然DTO中运营人员也可人工关闭车门,在列车终点站这将有效节省不少时间。
4.5、无人看守的全自动运行(UTO)
在最高等级的全自动列车运行中,真正实现了无人运营,包括在停车场与车辆段,列车可自动上下线。但当系统发生故障时,应能保证远程的列车控制,或者至少运营人员能在较短时间内迅速到达事故地点,因此运营中心与列车的通信是不可或缺的。尤其需要注意的是,列车自动开关门,门控制系统应能探测识别人、背包、宠物等,具备防夹防掉落功能。
5、系统性能评估
轨道交通系统的最终目的是按计划安全的运送乘客/货物,其运营服务质量可以通过多个参数来考核,例如总运营时长、班次间隔、收费结构等。同时系统的可靠性、可用性及其安全性也应当被考量。本章节将介绍城市轨道交通系统运营及服务质量的一些特性参数。
除了上述的功能性需求外,自动列控系统还应满足以下这些非功能性需求。
5.1、可信赖性
在轨道交通领域对于系统的可信赖性考量有个专业的名词叫RAMS,即可靠性(Reliability), 可用性(Availability), 可维修性(Maintainability)和安全性(Safety and Security),以下将对这些概念做个粗略解释(由于篇幅限制,后续会详细介绍实现各等级要求的技术与应用):
可靠性:产品在规定的条件和规定的时间内,完成规定功能的能力。
可用性:产品在任意随机时刻需要和开始执行任务时,处于可工作或可使用状态的程度。高可用性即要保证产品最大的工作时间与最小的宕机时间。提高单个组件可用性的同时,还可通过配置冗余设备,改变系统结构,增加故障预测系统等来提高产品的可用性。
可维修性:产品在规定条件下和规定时间内,按规定的程序和方法进行维修时,保持或恢复到规定状态的能力。
安全性:产品所具有的不导致人员伤亡、系统损坏、重大财产损失、不危害员工健康与环境的能力。安全性实际上包含产品的功能安全与IT-信息安全等。
5.2、生命周期费用(LCC)
城市轨道交通的自动化建设与运营需要大量的资本投入,并且这种投资是贯穿系统全生命周期的,往往都在几十年以上。初期错误的决定造成的后果在后期很难改善,带来极大的资源浪费。IEC60300-3-3标准中对轨道系统生命周期费用做出了详细具体要求。更优情况下,对于长周期的系统(例如25年以上)来说,增加初期的建设投入可能会降低后期的运营维护成本。相比传统的轨道系统,全自动的列控系统具有以下优势:
更少的轨旁室外设备–通过连续的车地间无线通信,可以大量减少轨旁的空闲检测设备;驾驶室信号的运用可以舍弃轨旁的信号机。这些设备的省略能节省投入与维护成本。
节省能源–3.2中提及的列车自动驾驶功能可以为节省列车牵引耗电做出巨大贡献。
更多的运营收入–更贴合乘客运力需求的全自动列控系统可以增强轨道交通在城市公共交通领域的竞争力,为轨道运营带来更多创收。
5.3、系统性能
全自动列控系统可以提高线路的使用效率,它得益于:
连续的列车监督与速度监控可以减短所需保护区段的长度,并缩短列车的班次间隔。
连续的轨道空闲检测和移动闭塞技术可以缩短列车的跟车间隔时间。
6、展望
过去几十年越来越多的城市在其轨道交通运营中使用了基于通信的列车控制技术,国内例如北京、上海、南京、苏州、成都、武汉等城市在新建的一些地铁线路中都选择了GoA3级别的无人驾驶运行技术。然而至今由于各生产商集成商的差异性,轨道交通最终的互联互通一体化还有很长的路要走。尤其是无人驾驶线路,A厂商的列车还暂不可能在B厂家提供安全防护的线路上运行。
互联互通路漫漫,轨道交通投资建设运营涉及到各行各业的生产制造商;但革命者却不断的尝试在迈开步伐走得更远,例如在国内西南某城市地铁线路上已初步实践了互联互通发展。长远来看,城市轨道交通全自动运营改造已是大势所趋,在满足上文所介绍的一些功能性能等要求同时,还应至少遵从以下这些准则:乘客运营影响最小化、改造过程中技术和运营风险最小化、列车和设备费用成本最小化、尽可能短的项目建设周期、尽可能降低设备维护成本。