目 录
1 绪论 1
1.1 物料搬运装置的概述 1
1.2 物料搬运装置的发展史 1
1.3 气动技术及气动物料搬运装置的发展过程 2
1.4 物料搬运装置未来的发展趋势 3
1.5 本课题研究内容 6
1.6 课题研究的意义 6
2 物料搬运装置的总体设计方案 7
2.1 物料搬运装置的工作原理及系统组成 7
2.2 物料搬运装置基本形式的选择 8
2.3 驱动机构的选择 9
2.4 物料搬运装置详细设计参数 9
2.5 本章小结 9
3 物料搬运装置手部结构设计及计算 10
3.1 手部结构 10
3.2 物料搬运装置手爪设计计算 10
3.3 夹紧气缸的设计 12
3.4 手爪夹持范围计算 14
3.5 物料搬运装置手爪夹持精度的分析计算 15
3.6 弹簧的设计计算 16
3.7 本章小结 18
4 腕部的设计计算 19
4.1 腕部设计的基本要求 19
4.2 腕部的结构以及选择 19
4.3 腕部的驱动力矩计算 20
4.4 腕部工作压力的计算 21
4.5 气压缸盖螺钉的计算 22
4.6 动片和输出轴间的连接螺钉 23
4.7 本章小结 24
5 物料搬运装置手臂机构的设计 25
5.1 手臂的设计要求 25
5.2 伸缩气压缸的设计 25
5.3 导向装置 29
5.4 本章小结 29
6 物料搬运装置腰部和基座结构设计及计算 30
6.1 结构设计 30
6.2 控制手臂上下移动的腰部气缸的设计 30
6.3 导向装置 33
6.4 平衡装置 33
6.5 机身回转机构的计算 33
6.6 本章小结 34
7 物料搬运装置的PLC控制系统设计 35
7.1 气压传动系统工作原理图 35
7.2 可编程序控制器的选择及工作过程 36
7.3 可编程序控制器的使用步骤 36
7.4 物料搬运装置可编程序控制器控制方案 37
7.5 本章小结 47
8 结论 48
参考文献 49
致 谢 50
2 物料搬运装置的总体设计方案
2.1 物料搬运装置的工作原理及系统组成
物料搬运装置的工作原理:物料搬运装置主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。在PLC程序控制的条件下,采用气压传动方式,来实现执行机构的相应部位发生规定要求的,有顺序,有运动轨迹,有一定速度和时间的动作[7]。
(1)执行机构
包括手部、手腕、手臂和立柱等部件,有的还增设行走机构。
a.手部
即与物件接触的部件。由于与物件接触的形式不同,可分为夹持式和吸附式手在本课题中我们采用夹持式手部结构。夹持式手部由手指(或手爪)和传力机构所构成。手指是与物件直接接触的构件,常用的手指运动形式有回转型和平移型。回转型手指结构简单,制造容易,故应用较广泛。平移型应用较少,其原因是结构比较复杂,但平移型手指夹持圆形零件时,工件直径变化不影响其轴心的位置,因此适宜夹持直径变化范围大的工件。手指结构取决于被抓取物件的表面形状、被抓部位(是外廓或是内孔)和物件的重量及尺寸。传力机构通过手指产生夹紧力来完成夹放物件的任务。传力机构的型式较多时常用的有:滑槽杠杆式、连杆杠杆式、斜面杠杆式、齿轮齿条式、丝杠螺母弹簧式和重力式等。
b.手臂
手臂是支承被抓物件、手部、手腕的重要部件。手臂的作用是带动手指去抓取物件,并按预定要求将其搬运到指定的位置。工业物料搬运装置的手臂通常由驱动手臂运动的部件(如油缸、气缸、齿轮齿条机构、连杆机构、螺旋机构和凸轮机构等)与驱动源(如液压、气压或电机等)相配合,以实现手臂的各种运动。
c.立柱
立柱是支承手臂的部件,立柱也可以是手臂的一部分,手臂的回转运动和升降(或俯仰)运动均与立柱有密切的联系。物料搬运装置的立柱因工作需要,有时也可作横向移动,即称为可移式立柱。
d.机座
机座是物料搬运装置的基础部分,物料搬运装置执行机构的各部件和驱动系统均安装于机座上,故起支撑和连接的作用。
(2)驱动系统
驱动系统是驱动工业物料搬运装置执行机构运动的。它由动力装置、调节装置和辅助装置组成。常用的驱动系统有液压传动、 气压传动、机械传动。
(3)控制系统
控制系统是支配着工业物料搬运装置按规定的要求运动的系统。目前工业物料搬运装置的控制系统一般由程序控制系统和电气定位(或机械挡块定位)系统组成。该物料搬运装置采用的是PLC程序控制系统,它支配着物料搬运装置按规定的程序运动,并记忆人们给予物料搬运装置的指令信息(如动作顺序、运动轨迹、运动速度及时间),同时按其控制系统的信息对执行机构发出指令,必要时可对物料搬运装置的动作进行监视,当动作有错误或发生故障时即发出报警信号。
(4)位置检测装置
控制物料搬运装置执行机构的运动位置,并随时将执行机构的实际位置反馈给控制系统,并与设定的位置进行比较,然后通过控制系统进行调整,从而使执行机构以一定的精度达到设定位置[8]。
2.2 物料搬运装置基本形式的选择
常见的工业物料搬运装置根据手臂的动作形态,按坐标形式大致可以分为以下4种: a直角坐标型物料搬运装置;b圆柱坐标型物料搬运装置; c球坐标(极坐标)型物料搬运装置;d多关节型机物料搬运装置。其中圆柱坐标型物料搬运装置结构简单紧凑,定位精度较高,占地面积小,容易实现[7]。因此,本设计采用圆柱坐标型。图2-1是物料搬运装置外观轮廓图。
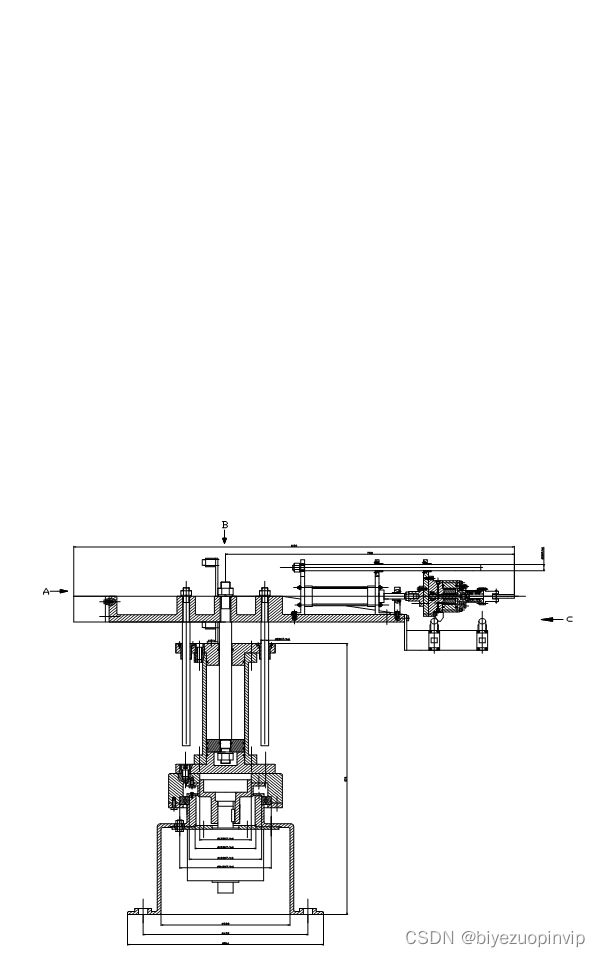
图2-1物料搬运装置外观轮廓图

















物料搬运装置及控制系统设计(CAD+PLC)
news2025/3/2 1:21:35
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/44238.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章


Day814.电商系统表设计优化案例分析 -Java 性能调优实战
电商系统表设计优化案例分析
Hi,我是阿昌,今天学习记录的是关于电商系统表设计优化案例分析。
如果在业务架构设计初期,表结构没有设计好,那么后期随着业务以及数据量的增多,系统就很容易出现瓶颈。
如果表结构扩展…
CentOS7.9 安装配置MySQL5.7.30
1.下载mysql安装包:mysql-5.7.30-linux-glibc2.12-x86_64.tar.gz 2. 卸载自带的mariadb和mysql 检查是否安装了mariadb和mysql,有时候默认安装了 rpm -qa | grep mariadb rpm -qa | grep mysql 如果没有,就可以安装mysql,如果有&a…

Centos7搭建SVN代码控制服务器
Centos7搭建SVN代码控制服务器检查SVN是否安装创建SVN版本库配置代码库设置允许访问远程仓库的用户帐号密码设置权限控制设置SVN服务配置启动svn与停止启动SVN关闭SVN访问拉取远程仓库代码检查SVN是否安装
1、centos7系统自带SVN rpm -qa subversion2、如果没有则通过yum安装 …
![[论文精读|博士论文]面向文本数据的关系抽取关键技术研究](https://img-blog.csdnimg.cn/4dd899071fb84c049fe3ccb3c2f884cc.png#pic_center)
[论文精读|博士论文]面向文本数据的关系抽取关键技术研究
电子科技大学 2022.3.15博士论文
实体关系的方向性语义缺失,使得关系的判别缺乏对文本蕴含语义特征的利用 提出——基于句法关系的方向敏感型句子级关系抽取算法 利用依存句法树结构信息构建双向依存路径结构(新的文本策略解决过度剪裁)额外…
构建直接序列扩频系统模型(Matlab代码实现)
🍒🍒🍒欢迎关注🌈🌈🌈 📝个人主页:我爱Matlab 👍点赞➕评论➕收藏 养成习惯(一键三连)🌻🌻🌻 🍌希…

【分析笔记】全志 i2c-sunxi.c 控制器驱动分析
分析平台:全志 A64 内核版本:Linux 4.9 数据手册:Allwinner_A64_User_Manual_V1.1.pdf (whycan.com)
驱动框架 I2C 设备驱动
作为方案应用来说,我们是最经常要动的地方,这一层主要与具体的芯片功能强关联,…

RK3588平台开发系列讲解(USB篇)内核 USB 配置
平台内核版本安卓版本RK3588Linux 5.10Android 12文章目录 一、USB PHY CONFIG二、USB Host CONFIG三、USB OTG CONFIG四、USB Gadget CONFIG沉淀、分享、成长,让自己和他人都能有所收获!😄 📢本篇将介绍USB的相关配置。
USB 模块的配置及保存和其它内核模块的配置方法一…

【AI学习笔记】jupyter notebook 默认路径修改(超简介,超详细)
文章目录修改前:修改notebook默认路径:1. 找到 Anaconda 的安装目录2. 修改 notebook 安装位置3. 删除"%USERPROFILE%/"内容修改后:【声明:由于我的电脑有 Anaconda3的root环境 和 名为TensorFlow 的 Anaconda虚拟环境&…

操作系统学习笔记(Ⅱ):进程
目录
1 进程
1.1 定义、组成、组织方式与特征
1.定义
2.组成
3.组织方式
4.进程的特征
1.2 进程的状态与转换
1.状态
2.进程状态的转换
1.3 进程控制
1.基本概念
2.进程控制相关的原语
1.4 进程通信
1.共享存储
2.消息传递
3.管道通信
1.5 线程概念和多线…

Python数据分析实战-实现模型K折交叉验证(附源码和实现效果)
前面我介绍了可视化的一些方法以及机器学习在预测方面的应用,分为分类问题(预测值是离散型)和回归问题(预测值是连续型)(具体见之前的文章)。
从本期开始,我将做一个数据分析类实战…
mybatisplus savebatch 多数据源时候,sqlSessionFactory 不正确踩坑记录。
记录一下 mybatis-plus sharding-JDBC 的时候,因为配置多数据源和多个SqlSessionFactory导致 mybatisPlus 执行 saveBatch 异常的问题。
具体异常就是 saveBatch 执行的数据源,与期望的不一致。其实是因为 SqlSessionFactory 错误导致的。
项目中有2个…

程序员第一次接私活?记住这三点让你事半功倍
不少程序员都有接私活的想法,但恰恰就如开发者之间的论调一样,接私活其实是有一定难度的,想找到合适的单子,顺利地做完并拿到薪水,需要注意的事儿很多,接下来和大家分享一下,程序员第一次接私活…
改进的多目标差分进化算法在电力系统环境经济调度中的应用(Python代码实现)【电气期刊论文复现】
🎉🎉🎉🎉欢迎您的到来😊😊😊 🥬博客主页:博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 📝床头铭:将来的我一定会感谢…
![[附源码]计算机毕业设计springbootSwitch交流平台](https://img-blog.csdnimg.cn/a2cb92d2ee4d4e848af4e034a29a7ca3.png)
[附源码]计算机毕业设计springbootSwitch交流平台
项目运行
环境配置:
Jdk1.8 Tomcat7.0 Mysql HBuilderX(Webstorm也行) Eclispe(IntelliJ IDEA,Eclispe,MyEclispe,Sts都支持)。 项目技术:
SSM mybatis Maven Vue 等等组成,B/S模式 M…

Android 插件化
demo
如果要加载插件模块编译的apk插件包中的Activity类,需要执行如下流程:
1)加载类对象:使用DexClassLoader加载Activity对应的Class字节码类对象;
2)管理生命周期:处理加载进来的Activity…

【算法自由之路】前缀树 桶排序之计数排序和基数排序
【算法自由之路】前缀树 & 桶排序之计数排序和基数排序
前缀树(字典树)
首先是前缀树,前缀树是由字符构成的树结构,它记录有多少前缀字符通过,以及有多少个同样的字符串,其找这类信息的时间复杂度是极…

minigui编译移植
minigui编译移植 一:文件系统依赖支持二:交叉编译libminigui-1.6.10三:交叉编译mg-samples-1.6.10四:资源minigui-res-1.6.10四:开发板拷贝资源五:/etc/MiniGUI.cfg配置文件修改六:系统环境变量设置一:文件系统依赖支持 zlib libpng libjpeg 二:交叉编译libminigui-1.6.10 conf…
第五届安洵杯网络挑战赛WP
Crypto
Cry1
crypto签到题,就是先对SHA256的哈希值进行爆破,然后猜数字
用hashcat一条命令秒穿
hashcat --custom-charset1 ?d?l?u -a 3 -m 1400 3075696ea46516c3a0a43930fab5a0f1c68ea4b315dd87a9cd123dac7f20f3a6 ?1?1?1?1GJWVMYlh5ApWLbF…