【在Github上寻找安装ROS软件包】
- 1. Github网站搜索
- 2. 工作空间
- 3. WPR系列机器人仿真工具
- 3.1 系统版本
- 3.2 复制https git下载链接
- 3.3 安装依赖项:
- 3.4 编译工作空间
- 3.5 载入工作空间的环境配置
- 3.6 运行编译的ros程序
- 3.6 运行rqt控制的ros程序
- 3.7 提前初始化source文件
 项目地址:https://github.com/6-robot/wpr_simulation
项目地址:https://github.com/6-robot/wpr_simulation
视频地址:https://www.bilibili.com/video/BV1dV4y1u758
环境配置:https://blog.csdn.net/qq_41450811/article/details/99079041
1. Github网站搜索
官网:https://github.com/
2. 工作空间
创建工作空间

mkdir catkin_ws
cd catkin_ws
mkdir src
下载git工具
sudo apt install git
3. WPR系列机器人仿真工具
3.1 系统版本
该项目暂时提供三个版本,我选择的18.04 ROS Melodic
- ROS Noetic (Ubuntu 20.04)
- ROS Melodic (Ubuntu 18.04)
- ROS Kinetic (Ubuntu 16.04)
github搜索wpr_simulation

3.2 复制https git下载链接
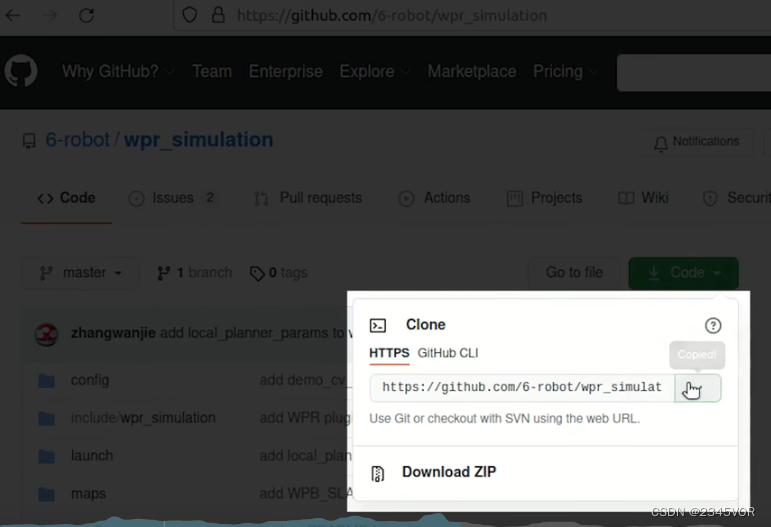 获取源码:
获取源码:
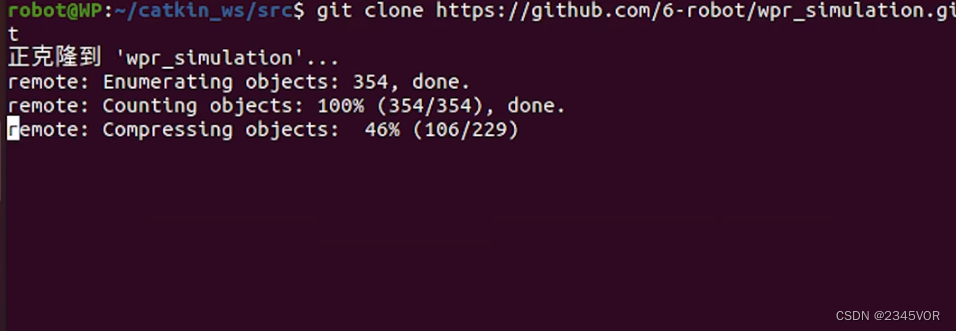
cd ~/catkin_ws/src/
git clone https://github.com/6-robot/wpr_simulation.git
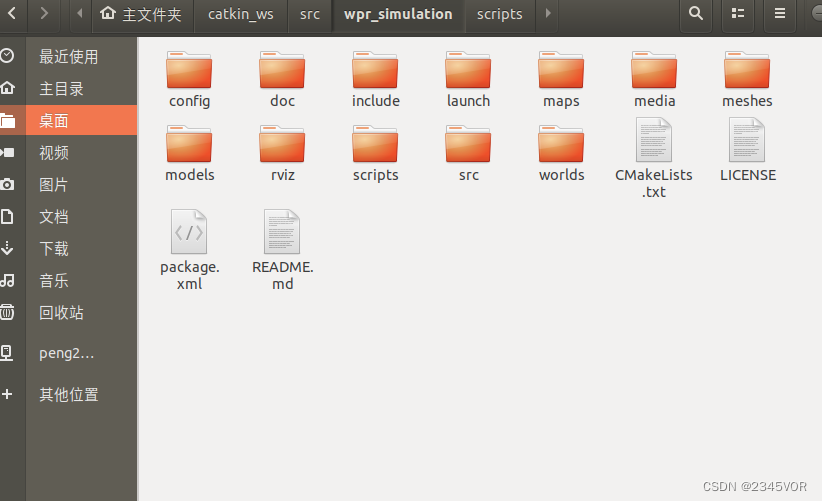
文件查看
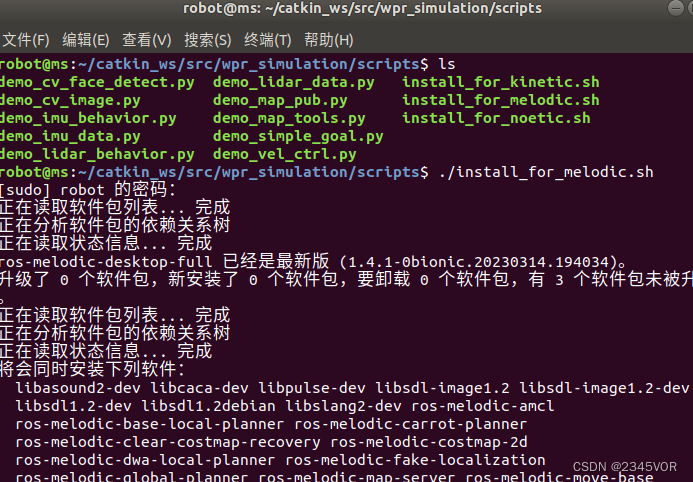
3.3 安装依赖项:
依赖包版本匹配
ROS Melodic (Ubuntu 18.04)
cd ~/catkin_ws/src/wpr_simulation/scripts
./install_for_Melodic.sh
3.4 编译工作空间
cd ~/catkin_ws
catkin_make
3.5 载入工作空间的环境配置
source ~/catkin_ws/devel/setup.bash

3.6 运行编译的ros程序
简单场景:
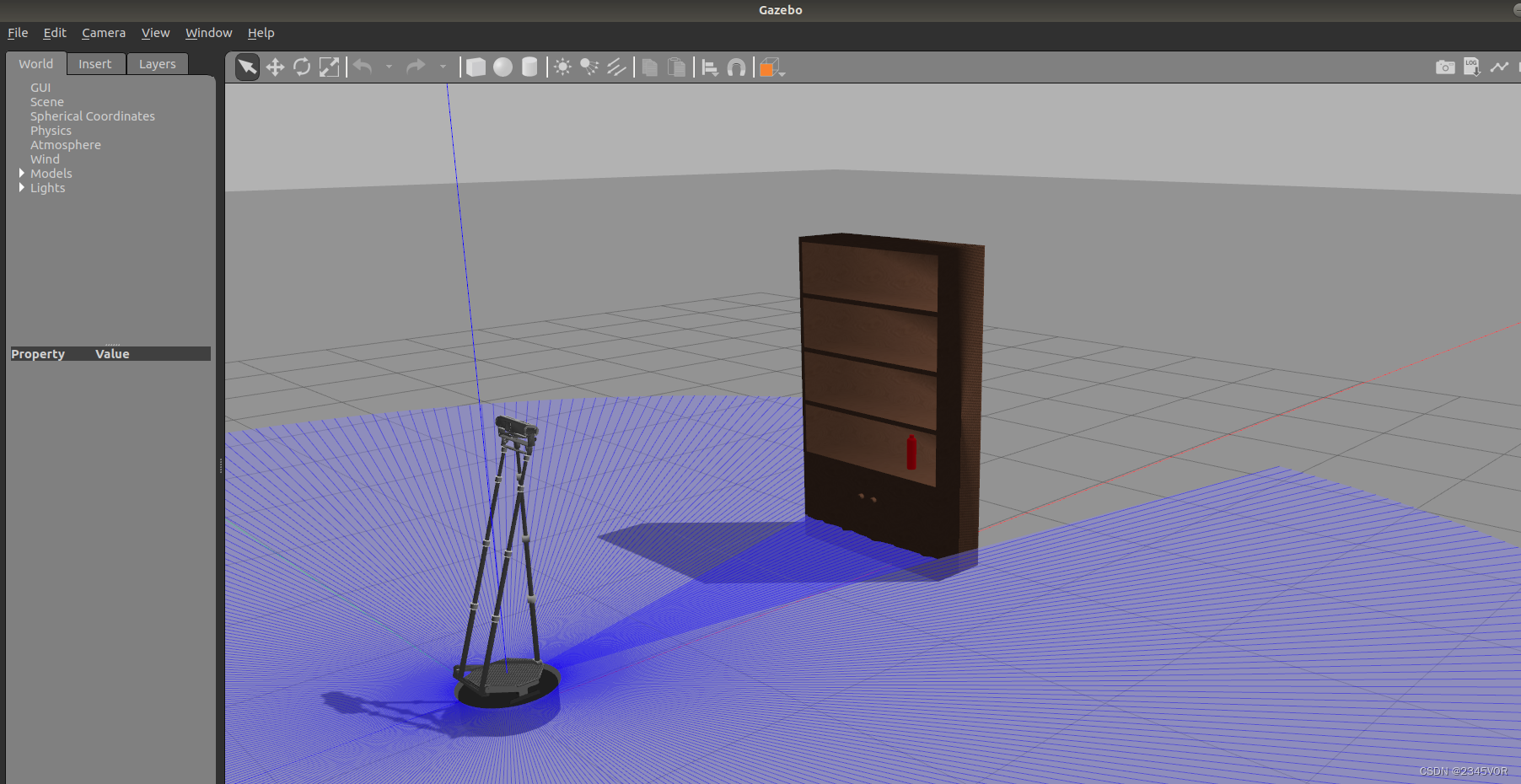
roslaunch wpr_simulation wpb_simple.launch
 显示gazebo仿真环境
显示gazebo仿真环境
3.6 运行rqt控制的ros程序
rosrun rqt_robot_steering rqt_robot_steering
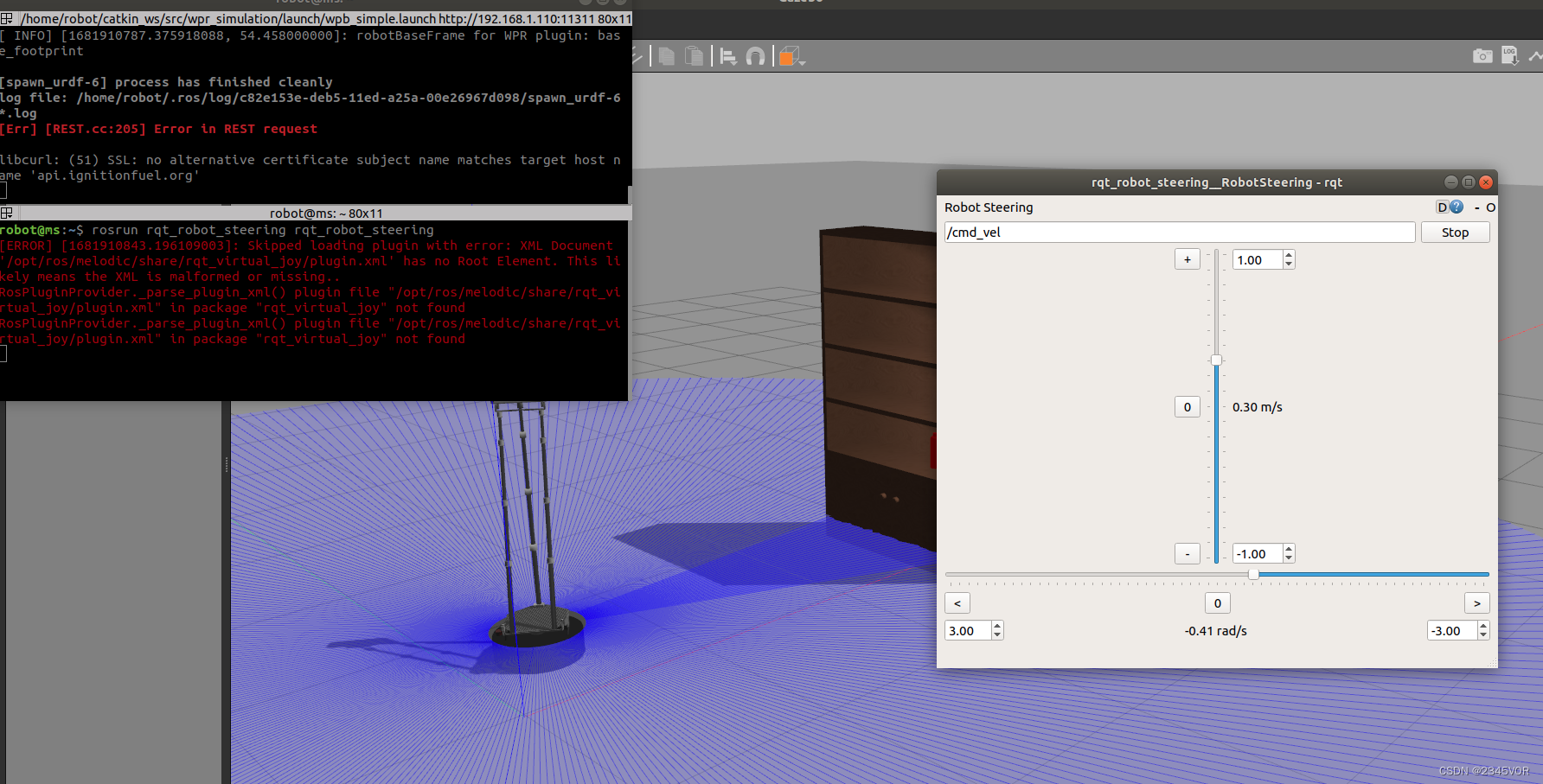
然后滑动速度和角速度
3.7 提前初始化source文件
gedit ~/.bashrc
 添加source文件
添加source文件
# Set ROS melodic
source /opt/ros/melodic/setup.bash
source ~/catkin_ws/devel/setup.bash
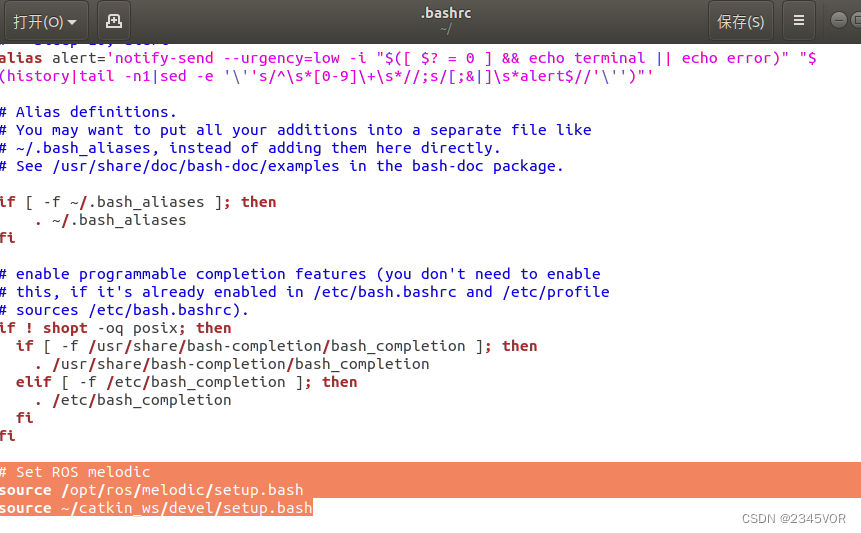
修改后保存
后面可以直接启动catkin_ws下的ros程序



![[Gitops--3]项目代码发布案例Argocd+Gitlab-Runner](https://img-blog.csdnimg.cn/978a1396db5e474ea49baf6e438ac36e.png)