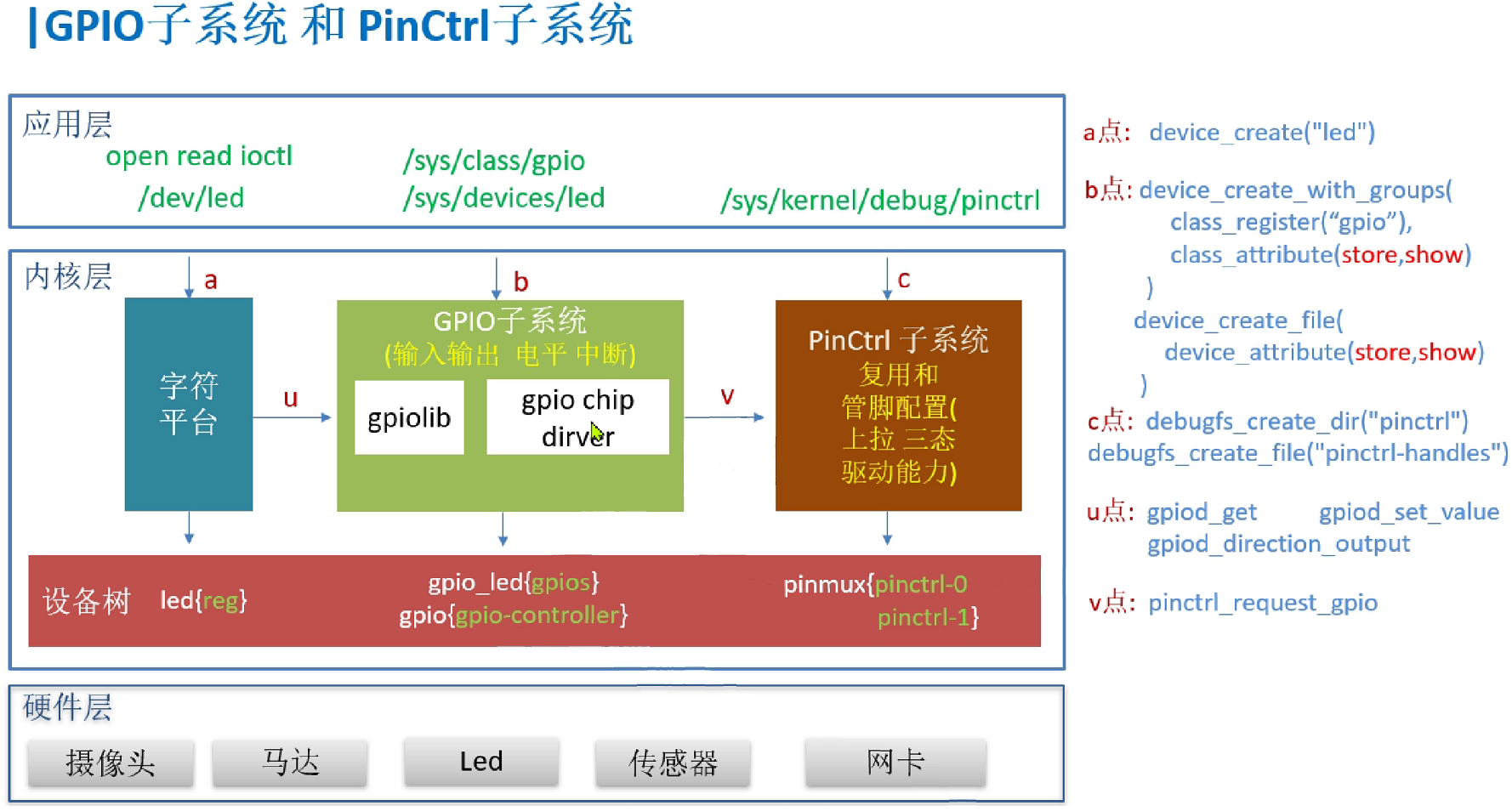
GPIO子系统
0.暴露给应用层
应用
$ echo 79 > /sys/class/gpio/export //导出79号gpio 引脚,使得可在应用层访问
$ echo out > /sys/class/gpio/gpio79/direction //设置 为输出
$ echo 1 > /sys/class/gpio/gpio79/value //输出高电平 开灯
$ echo 0 > /sys/class/gpio/gpio79/value //输出低电平, 关灯
$ cat /sys/kernel/debug/gpio //查询gpio状态(问题:发现找不到gpio文件)
$ echo 79 > unexport //取消导出(发现gpio79消失了)
解决调试目录为空的问题
原因 //debug需要的文件系统 debugfs没有挂载
在 /etc/fstab 的后面添加一行
debugfs /sys/kernel/debug debugfs defaults 0 0
调试信息
$ cat /sys/kernel/debug/gpio //查看gpio 当前配置情况(驱动暴露的调试信息)
$ cat /sys/kernel/debug/tegra_gpio //查看GPIO 寄存器内容(和芯片手册进行对应)
$ cat /sys/kernel/debug/tegra_pinctrl_reg //查看 pinctrl 寄存器内容
1.最简读写文件(在/SYS下)
设备树
sys_rw_led{ //对应生成 /sys/devices/sys_rw_led/led_gpio
compatible = "sys_rw_led";
led_gpio = <&gpio TEGRA_GPIO(J,7) GPIO_ACTIVE_HIGH>;
};
验证测试
$ cd sys_rw_led
$ make
$ cp led.ko /nfs/rootfs
$ cd ~/kernel-4.9
$ make dtbs
$ cp arch/arm64/boot/dts/tegra210-p3448-0000-p3449-0000-b00.dtb /tftpboot/
重启板子
$ insmod led.ko
$ cd /sys/devices/sys_rw_led
$ echo 0 > led_gpio //关灯
$ echo 1 > led_gpio //亮灯
编译文件
//Makefile
ifeq ($(KERNELRELEASE),)
KERNELDIR ?= ~/kernel-4.9
PWD := $(shell pwd)
all:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
clean:
rm -rf *.o *~ core .depend .*.cmd *.ko *.mod.c .tmp_versions Module* modules* a.out *.bak
else
obj-m := led.o
endif
驱动
-
of_get_named_gpio_flags//获取设备树节点的属性gpio_is_valid//判断是否合法devm_gpio_request//申请使用gpio,并调用设置pinctrl
-
device_create_file //根据设备树节点属性,创建相应的属性文件 /sys/devices/sys_rw_led/led_gpio
- static struct device_attribute dev_attr_file //属性文件的描述
//led.c
#include <linux/init.h>
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/slab.h>
#include <linux/err.h>
#include <linux/of_gpio.h>
#include <linux/gpio.h>
#include <linux/platform_device.h>
#include <asm/io.h>
#include <dt-bindings/gpio/gpio.h>
#ifdef CONFIG_OF
#include <linux/of.h>
#include <linux/of_device.h>
#include <linux/of_gpio.h>
#endif
int led_gpio;
static ssize_t led_store(struct device *dev, struct device_attribute *attr,
const char *buf, size_t count) {
//写文件,控制 gpio 输出 ( echo 1 > led_gpio)
if (buf[0] == '0') {
gpio_direction_output(led_gpio, 0);
}else if (buf[0] == '1') {
gpio_direction_output(led_gpio, 1);
}
printk(KERN_ERR "led_gpio_store %c \n",buf[0]);
return count;
}
ssize_t led_show(struct device *dev, struct device_attribute *attr,char *buf){
printk("led_show go \n");
return 0;
}
//属性文件的描述
static struct device_attribute dev_attr_file = {
.attr = {
.name = "led_gpio",
.mode = (S_IRUGO | S_IWUSR)
},
.store = led_store, //echo 1> 就调用到这里了
.show = led_show, //cat led_gpio时调用,如果无需读的功能,可设为NULL, 且删除前面的S_IRUGO
};
int leds_probe(struct platform_device *pdev)
{
int ret = 0;
enum of_gpio_flags flags;
//获取设备树节点的属性 "led_gpio"
led_gpio = of_get_named_gpio_flags(pdev->dev.of_node, "led_gpio", 0, &flags);
if (gpio_is_valid(led_gpio)) //判断是否合法
{
ret = devm_gpio_request(&pdev->dev,led_gpio, "led_gpio"); //申请使用gpio(如果被占用,将申请失败)
if (ret) {
printk("Failed to get led_gpio gpio.\n");
return -1;
}
}
//根据设备树节点属性,创建相应的属性文件 /sys/devices/sys_rw_led/led_gpio
device_create_file(&pdev->dev, &dev_attr_file); // /device_create_file 里面是调用了 sysfs_create_file
printk("leds_probe 1 ok\n");
return 0;
}
int leds_remove(struct platform_device *pdev)
{
device_remove_file(&pdev->dev, &dev_attr_file);
printk("leds_remove ok\n");
return 0;
}
static const struct of_device_id of_led_match[] = {
{ .compatible = "sys_rw_led", },
{},
};
MODULE_DEVICE_TABLE(of, of_led_match);
struct platform_driver leds_drv = {
.driver = {
.owner = THIS_MODULE,
.name = "sys_rw_led driver" ,
.of_match_table = of_led_match,
},
.probe = leds_probe,
.remove = leds_remove,
};
module_platform_driver(leds_drv);
MODULE_LICENSE("GPL");
2.读写多个属性文件(在SYS下)
设备树
sys_rw_gpio{
compatible = "bbcen,sys_rw_gpio";
led_gpio = <&gpio TEGRA_GPIO(J,7) GPIO_ACTIVE_HIGH>; //40pin 丝印 12
smoke_sensor_gpio = <&gpio TEGRA_GPIO(S,5) GPIO_ACTIVE_HIGH>; //40pin 丝印 29
};
验证测试
$ cd sys_read_write
$ make
$ cp gpio.ko /nfs/rootfs
$ cd ~/kernel-4.9
$ make dtbs
$ cp arch/arm64/boot/dts/tegra210-p3448-0000-p3449-0000-b00.dtb /tftpboot/
重启板子
$ insmod gpio.ko
$ cd /sys/devices/sys_rw_gpio
$ echo 0 > led_gpio //关灯
$ echo 1 > led_gpio //亮灯
$ cat smoke_sensor_gpio //读管脚输入电平,默认读到0,用杜邦线,把它接到前面亮灯的管脚时,能成功读到1
编译文件
ifeq ($(KERNELRELEASE),)
KERNELDIR ?= ~/kernel-4.9
PWD := $(shell pwd)
all:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
clean:
rm -rf *.o *~ core .depend .*.cmd *.ko *.mod.c .tmp_versions Module* modules* a.out *.bak
else
obj-m := gpio.o
endif
驱动
-
定义一个结构体指针,分配空间,指定内容
-
device_attribute gpio_attr[]
-
sysfs_create_file //for循环读取,和上面的数组配合实现读多个属性
#include <linux/init.h>
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/slab.h>
#include <linux/delay.h>
#include <linux/err.h>
#include <linux/of_gpio.h>
#include <linux/gpio.h>
#include <linux/platform_device.h>
#include <asm/irq.h>
#include <asm/io.h>
#include <linux/delay.h>
#include <dt-bindings/gpio/gpio.h>
#ifdef CONFIG_OF
#include <linux/of.h>
#include <linux/of_device.h>
#include <linux/of_gpio.h>
#endif
struct gpio_dev{
struct platform_device *pdev;
int led_gpio;
int led_gpio_direction;
int smoke_sensor_gpio;
};
static struct gpio_dev *gpio_dev = NULL;
static ssize_t led_gpio_store(struct device *dev, struct device_attribute *attr,
const char *buf, size_t count) {
//写文件,控制 gpio 输出 ( echo 1 > led_gpio)
struct gpio_dev *pdata = gpio_dev;
if (buf[0] == '0') {
pdata->led_gpio_direction = 0;
gpio_direction_output(pdata->led_gpio, pdata->led_gpio_direction);
}else if (buf[0] == '1') {
pdata->led_gpio_direction = 1;
gpio_direction_output(pdata->led_gpio, pdata->led_gpio_direction);
}
printk(KERN_ERR "led_gpio_store %d \n",pdata->led_gpio_direction);
return count;
}
static ssize_t smoke_sensor_gpio_show(struct device *dev, struct device_attribute *attr, char *buf) {
struct gpio_dev *pdata = gpio_dev;
int gpio_value = 0;
gpio_value = gpio_get_value(pdata->smoke_sensor_gpio); //获取 gpio的输入值(cat smoke_sensor_gpio 时会触发)
return snprintf(buf, PAGE_SIZE, "%d\n",gpio_value);
}
static struct device_attribute gpio_attr[] = {
__ATTR(led_gpio, 0664, NULL, led_gpio_store), //写:关联属性文件的写回调函数(*store) echo时触发
__ATTR(smoke_sensor_gpio, 0664, smoke_sensor_gpio_show,NULL), //读:关联属性文件的读回调函数(*show) cat 时触发
};
static int gpio_init_sysfs(struct device *dev)
{
int i, ret;
for (i = 0; i < ARRAY_SIZE(gpio_attr); i++) {
ret = sysfs_create_file(&dev->kobj, //创建设备的属性文件
&gpio_attr[i].attr);
if (ret){
dev_err(dev, "create charger node(%s) error\n",gpio_attr[i].attr.name);
return -1;
}
}
return 0;
}
static int gpio_dt(struct gpio_dev *pdata) {
int gpio;
int ret;
enum of_gpio_flags flags;
struct device *dev = &pdata->pdev->dev;
struct device_node *node = dev->of_node;
gpio = of_get_named_gpio_flags(node, "led_gpio", 0, &flags);
if (gpio_is_valid(gpio))
{
pdata->led_gpio = gpio;
pdata->led_gpio_direction = (flags == GPIO_ACTIVE_HIGH)? 1:0;
printk(KERN_ERR"led_gpio: %d\n", pdata->led_gpio);
ret = devm_gpio_request(dev,gpio, "led_gpio");
if (ret) {
printk("Failed to get led_gpio gpio.\n");
return -1;
}
}
gpio = of_get_named_gpio_flags(node, "smoke_sensor_gpio", 0, &flags);
if (gpio_is_valid(gpio))
{
pdata->smoke_sensor_gpio = gpio;
printk(KERN_ERR"smoke_sensor_gpio: %d\n", pdata->smoke_sensor_gpio);
ret = devm_gpio_request(dev,gpio, "smoke_sensor_gpio");
if (ret) {
printk("Failed to get smoke_sensor_gpio gpio.\n");
return -1;
}
ret = gpio_direction_input(gpio);
if (ret) {
printk("Failed to set flame_sensor_gpio gpio.\n");
return -1;
}
}
return 0;
}
static void gpio_set_default(struct gpio_dev *pdata) {
if (pdata->led_gpio) {
gpio_direction_output(pdata->led_gpio, pdata->led_gpio_direction);
}
}
static int gpio_probe(struct platform_device *pdev) {
int ret=0;
printk(KERN_ALERT "%s \n",__func__);
gpio_dev = kmalloc(sizeof(struct gpio_dev), GFP_KERNEL);
if (gpio_dev == NULL) {
printk(KERN_ERR"kmalloc struct gpio_dev err \n");
return -ENOMEM;
}
memset(gpio_dev, 0, sizeof(struct gpio_dev));
gpio_dev->pdev = pdev;
ret = gpio_dt(gpio_dev);
if(ret<0){
printk(KERN_ERR"gpio_dt err \n");
return -1;
}
gpio_set_default(gpio_dev);
ret = gpio_init_sysfs(&gpio_dev->pdev->dev);
if(ret<0){
printk(KERN_ERR"gpio_init_sysfs err \n");
return -1;
}
printk(KERN_ALERT "%s ok !!\n",__func__);
return 0;
}
static int gpio_remove(struct platform_device *pdev){
kfree(gpio_dev);
return 0;
}
static struct of_device_id gpio_of_match[] = {
{ .compatible = "bbcen,sys_rw_gpio" },
{ }
};
static struct platform_driver gpio_driver = {
.driver = {
.name = "sys_rw_gpio driver ",
.of_match_table = of_match_ptr(gpio_of_match),
},
.probe = gpio_probe,
.remove = gpio_remove,
};
3.点多个灯(官方示例)
帮助文档
官方有驱动文件了,只需要参考帮助文档改设备树,make menuconfig对应选配,就能用了
//Documentation/devicetree/bindings/leds/leds-gpio.txt
设备树
//tegra210-p3448-0000-p3449-0000-b00.dts
yhai-gpio-led {
compatible = "gpio-leds";
led1 {
label = "led1";
gpios = <&gpio TEGRA_GPIO(J,7) GPIO_ACTIVE_HIGH>; //对应40pin 丝印 12脚 接第一个灯
default-state = "off";
};
led2 {
label = "led2";
gpios = <&gpio TEGRA_GPIO(Z,0) GPIO_ACTIVE_HIGH>; //对应40pin 丝印 31脚 接第二个灯
default-state = "off";
};
led3 {
label = "led3";
gpios = <&gpio TEGRA_GPIO(S,5) GPIO_ACTIVE_HIGH>; //对应40pin 丝印 29脚 接第三个灯
default-state = "off";
};
};
官方驱动
//见drivers/leds/leds-gpio.c
static const struct of_device_id of_gpio_leds_match[] = {
{ .compatible = "gpio-leds", },
{},
};
static struct platform_driver gpio_led_driver = {
.probe = gpio_led_probe,
.driver = {
.name = "leds-gpio",
.of_match_table = of_gpio_leds_match,
},
};
module_platform_driver(gpio_led_driver);
内核配置
$ cd ~/kernel-4.9
$ make menuconfig
Device Drivers --->
[*] LED Support --->
<*> LED Class Support
<*> LED Support for GPIO connected LEDs
验证测试
$ make dtbs
$ cp arch/arm64/boot/dts/tegra210-p3448-0000-p3449-0000-b00.dtb /tftpboot/
重启板子
# cd /sys/class/leds/
# echo 1 > led1/brightness //点亮第一个灯
# echo 0 > led1/brightness //灭第一个灯
# echo 1 > led2/brightness //点亮第二个灯
# echo 0 > led2/brightness //灭第二个灯
# echo 1 > led3/brightness //点亮第三个灯
# echo 0 > led3/brightness //灭第三个灯
4.GPIO库gpiolib(对上统一操作接口)
//源码 drivers/gpio/gpiolib.c: gpio子系统的核心实现,对外提供驱动API接口
EXPORT_SYMBOL_GPL(gpiod_get);
EXPORT_SYMBOL_GPL(gpiod_direction_output);
EXPORT_SYMBOL_GPL(gpiod_set_value);
//源码 drivers/gpio/gpiolib-sysfs.c
int gpiod_export(struct gpio_desc *desc, bool direction_may_change)
{
device_create_with_groups(&gpio_class, &gdev->dev,
MKDEV(0, 0), data, gpio_groups,
ioname ? ioname : "gpio%u", //创建 /sys/class/gpio/gpio79 文件夹
desc_to_gpio(desc));
}
static ssize_t export_store(struct class *class,
struct class_attribute *attr,
const char *buf, size_t len)
{
gpio_to_desc(gpio);
gpiod_request(desc, "sysfs"); //先申请(检测是否被占用)
gpiod_export(desc, true); //导出 生成 /sys/class/gpio/gpio79 文件夹(包括direction value等)
}
static struct class_attribute gpio_class_attrs[] = {
__ATTR(export, 0200, NULL, export_store), //写:关联属性文件的写回调函数(*store) echo 79 > /sys/class/gpio/export 时触发
__ATTR(unexport, 0200, NULL, unexport_store),
__ATTR_NULL,
};
static struct class gpio_class = {
.name = "gpio",
.owner = THIS_MODULE,
.class_attrs = gpio_class_attrs,
};
int gpiochip_sysfs_register(struct gpio_device *gdev)
{
//创建 /sys/class/gpio/gpiochip0 文件夹
device_create_with_groups(&gpio_class, parent,
MKDEV(0, 0),
chip, gpiochip_groups,
"gpiochip%d", chip->base);
}
static int __init gpiolib_sysfs_init(void)
{
struct gpio_device *gdev;
class_register(&gpio_class); //注册 生成 /sys/class/gpio 文件夹
gpiochip_sysfs_register(gdev);
}
postcore_initcall(gpiolib_sysfs_init); //声明 在内核启动时自动加载
5.GPIO设备树
//帮助文档 Documentation/devicetree/bindings/gpio/nvidia,tegra186-gpio.txt
//tegra210-soc-base.dtsi cpu的基本配置
//位置: public_sources\hardware\nvidia\soc\t210\kernel-dts\tegra210-soc\
gpio: gpio@6000d000 {//gpio子节点
compatible = "nvidia,tegra210-gpio", "nvidia,tegra124-gpio", "nvidia,tegra30-gpio";
reg = <0x0 0x6000d000 0x0 0x1000>; //前2个数表示起始地址(由父节点的#address-cells = <2> 决定)
//后2个数表示长度范围(由父节点的#size-cells = <2> 决定)
//域名(0:spi 1:ppi) + 中断索引(36) + 触发方式(高电平触发) Documentation/devicetree/bindings/interrupt-controller/arm,gic.txt
interrupts = < 0 32 0x04 //32: gpio编号 0x04:高电平触发中断
0 33 0x04
0 34 0x04
0 35 0x04
0 55 0x04
0 87 0x04
0 89 0x04
0 125 0x04>;
status = "disabled"; //声明 本节点是禁用状态
#gpio-cells = <2>; //声明 引用本节点,用 gpios 属性传参时 参数占2个单位
gpio-controller; //声明本节点 是 GPIO 控制器
#interrupt-cells = <2>;
interrupt-controller; //声明本节点 是 中断 控制器
gpio-ranges = <&pinmux 0 0 246>; //设置gpio number 与 pinctrl number的 映射,详见PinCtrl子系统
};
6.GPIO芯片驱动gpio_chip_driver
( 由原厂开发)
//查看驱动信息
$ cat /proc/devices //查看内核加载的驱动设备
254 gpiochip
$ cat /sys/class/gpio/gpiochip0/label //查看驱动设备的标签名
tegra-gpio //对应 gpio-tegra.c 的 tgi->gc.label = "tegra-gpio";
//源码 gpio-tegra.c 英伟达原厂开发的芯片驱动
定义类
//gpio-tegra.c
struct tegra_gpio_info { //定义gpio类
struct device *dev;
void __iomem *regs;
struct irq_domain *irq_domain;
struct tegra_gpio_bank *bank_info;
const struct tegra_gpio_soc_config *soc;
struct gpio_chip gc; //gpio控制器
struct irq_chip ic; //irq控制器
u32 bank_count;
};
static struct tegra_gpio_info *gpio_info; //定义 gpio对象
static const struct of_device_id tegra_gpio_of_match[] = {
{ .compatible = "nvidia,tegra210-gpio", .data = &tegra210_gpio_config },
};
static struct platform_driver tegra_gpio_driver = {
.driver = {
.name = "tegra-gpio",
.of_match_table = tegra_gpio_of_match,
},
.probe = tegra_gpio_probe,
};
static int __init tegra_gpio_init(void)
{
return platform_driver_register(&tegra_gpio_driver);
}
subsys_initcall(tegra_gpio_init); //添加到内核启动列表中
构建对象(注册制)
- devm_kzalloc会自动释放资源,常用
static int tegra_gpio_probe(struct platform_device *pdev)
{
struct tegra_gpio_info *tgi; //定义对象
//为对象分配空间
tgi = devm_kzalloc(&pdev->dev, sizeof(*tgi), GFP_KERNEL);
if (!tgi)
return -ENODEV;
gpio_info = tgi;
//获取所有bank的中断资源
for (;;) {
res = platform_get_resource(pdev, IORESOURCE_IRQ, //见设备树 interrupts =< 0 32 0x04 ...>
tgi->bank_count);
if (!res)
break;
tgi->bank_count++;
}
//初始化对象:里面的变量都赋值,指针都指向实体,
tgi->gc.label = "tegra-gpio"; //对应 /sys/class/gpio/gpiochip0/label
tgi->gc.request = tegra_gpio_request; //申请gpio(如果被占用,将申请失败)
tgi->gc.free = tegra_gpio_free; //释放gpio(释放后,别的驱动才能申请)
tgi->gc.direction_input = tegra_gpio_direction_input; //
tgi->gc.get = tegra_gpio_get;
tgi->gc.direction_output = tegra_gpio_direction_output;//gpio 方向设为输出
tgi->gc.set = tegra_gpio_set;
//获取MEM资源
res = platform_get_resource(pdev, IORESOURCE_MEM, 0); //见设备树 reg = <0x0 0x6000d000 0x0 0x1000>;
tgi->regs = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(tgi->regs))
return PTR_ERR(tgi->regs);
tegra_gpio_debuginit(tgi); //添加 调试功能
}
static inline void tegra_gpio_writel(struct tegra_gpio_info *tgi,
u32 val, u32 reg)
{
__raw_writel(val, tgi->regs + reg); /* 实现见 arch/arm64/include/asm/io.h
用C语言中嵌入汇编方式 ,用str 汇编指令 实现写数据
static inline void __raw_writel(u32 val, volatile void __iomem *addr)
{
asm volatile("str %w0, [%1]" : : "rZ" (val), "r" (addr));
}
*/
}
static void tegra_gpio_mask_write(struct tegra_gpio_info *tgi, u32 reg,
int gpio, int value)
{
tegra_gpio_writel(tgi, val, reg);
}
static void tegra_gpio_set(struct gpio_chip *chip, unsigned offset, int value)
{
//通过 GPIO_MSK_OUT 宏 实现各gpio 地址间转换关系(如不同端口 偏移量)
tegra_gpio_mask_write(tgi, GPIO_MSK_OUT(tgi, offset), offset, value);
}
static int tegra_gpio_direction_output(struct gpio_chip *chip, unsigned offset,
int value)
{
struct tegra_gpio_info *tgi = gpiochip_get_data(chip);
int ret;
tegra_gpio_set(chip, offset, value);
tegra_gpio_mask_write(tgi, GPIO_MSK_OE(tgi, offset), offset, 1);
tegra_gpio_enable(tgi, offset);
ret = pinctrl_gpio_direction_output(chip->base + offset); //向pinctrl子系统 申请管脚 设为gpio输出模式
return ret;
}
支持SYS控制
#ifdef CONFIG_DEBUG_FS //当打开 内核调试关,才把调试源码编译进来
#include <linux/debugfs.h>
#include <linux/seq_file.h>
static int dbg_gpio_open(struct inode *inode, struct file *file)
{
return single_open(file, dbg_gpio_show, inode->i_private);
}
static const struct file_operations debug_fops = {
.open = dbg_gpio_open,
.read = seq_read,
.llseek = seq_lseek,
.release = single_release,
};
static void tegra_gpio_debuginit(struct tegra_gpio_info *tgi)
{
(void) debugfs_create_file("tegra_gpio", S_IRUGO, //创建调试文件
NULL, tgi, &debug_fops);
}
#else
static inline void tegra_gpio_debuginit(struct tegra_gpio_info *tgi)
{
}
#endif
寄存器自适应(管脚变了,不用再该代码,只需该改备树)
#include <linux/gpio.h> //for gpio_chip
#define GPIO_BANK(x) ((x) >> 5)
#define GPIO_PORT(x) (((x) >> 3) & 0x3)
#define GPIO_BIT(x) ((x) & 0x7)
#define GPIO_REG(tgi, x) (GPIO_BANK(x) * tgi->soc->bank_stride + \
GPIO_PORT(x) * 4)
#define GPIO_CNF(t, x) (GPIO_REG(t, x) + 0x00)
#define GPIO_OE(t, x) (GPIO_REG(t, x) + 0x10)
#define GPIO_OUT(t, x) (GPIO_REG(t, x) + 0X20)
#define GPIO_IN(t, x) (GPIO_REG(t, x) + 0x30)
#define GPIO_INT_STA(t, x) (GPIO_REG(t, x) + 0x40)
#define GPIO_INT_ENB(t, x) (GPIO_REG(t, x) + 0x50)
#define GPIO_INT_LVL(t, x) (GPIO_REG(t, x) + 0x60)
#define GPIO_INT_CLR(t, x) (GPIO_REG(t, x) + 0x70)
#define GPIO_DBC_CNT(t, x) (GPIO_REG(t, x) + 0xF0)
#define GPIO_MSK_CNF(t, x) (GPIO_REG(t, x) + t->soc->upper_offset + 0x00)
#define GPIO_MSK_OE(t, x) (GPIO_REG(t, x) + t->soc->upper_offset + 0x10)
#define GPIO_MSK_OUT(t, x) (GPIO_REG(t, x) + t->soc->upper_offset + 0X20)
#define GPIO_MSK_DBC_EN(t, x) (GPIO_REG(t, x) + t->soc->upper_offset + 0x30)
#define GPIO_MSK_INT_STA(t, x) (GPIO_REG(t, x) + t->soc->upper_offset + 0x40)
#define GPIO_MSK_INT_ENB(t, x) (GPIO_REG(t, x) + t->soc->upper_offset + 0x50)
#define GPIO_MSK_INT_LVL(t, x) (GPIO_REG(t, x) + t->soc->upper_offset + 0x60)
#define GPIO_INT_LVL_MASK 0x010101
#define GPIO_INT_LVL_EDGE_RISING 0x000101
#define GPIO_INT_LVL_EDGE_FALLING 0x000100
#define GPIO_INT_LVL_EDGE_BOTH 0x010100
#define GPIO_INT_LVL_LEVEL_HIGH 0x000001
#define GPIO_INT_LVL_LEVEL_LOW 0x000000
struct tegra_gpio_soc_config {
bool debounce_supported;
u32 bank_stride;
u32 upper_offset;
};
static const struct tegra_gpio_soc_config tegra210_gpio_config = {
.debounce_supported = true,
.bank_stride = 0x100,
.upper_offset = 0x80,
};
static const struct of_device_id tegra_gpio_of_match[] = {
{ .compatible = "nvidia,tegra210-gpio", .data = &tegra210_gpio_config },
}
/*打印 各bank gpio 寄存器列表的值 -> 对应芯片手册里
#define GPIO3 0x6000D200 // 第3个Bank GPIO 的基地址
//---偏移量
#define CNF 0x04 //配置寄存器 (0:GPIO 1:SFIO)
#define OE 0x14 //输出使能寄存器 (1:使能 0:关闭)
#define OUT 0x24 //输出寄存器(1:高电平 0:低电平)
#define MSK_CNF 0x84 //配置屏蔽寄存器(高位1:屏蔽 高位0:不屏蔽 低位1:GPIO模式 低位0:SFIO模式)
#define MSK_OE 0x94 //输出使能屏蔽寄存器(高位1:禁止写 低位1:使能)
#define MSK_OUT 0xA4 //输出屏蔽寄存器(高位1:禁止写 低位1:高电平)
*/
static int dbg_gpio_show(struct seq_file *s, void *unused)
{
struct tegra_gpio_info *tgi = s->private;
int i;
int j;
char x, y;
x = ' ';
y = 'A';
seq_printf(s, "Name:Bank:Port CNF OE OUT IN INT_STA INT_ENB INT_LVL\n");
for (i = 0; i < tgi->bank_count; i++) {
for (j = 0; j < 4; j++) {
int gpio = tegra_gpio_compose(i, j, 0);
seq_printf(s,
"%c%c: %d:%d %02x %02x %02x %02x %02x %02x %06x\n",
x, y, i, j,
tegra_gpio_readl(tgi, GPIO_CNF(tgi, gpio)), //用GPIO_CNF 宏,实现各gpio 地址间转换关系(如不同端口 偏移量)
tegra_gpio_readl(tgi, GPIO_OE(tgi, gpio)),
tegra_gpio_readl(tgi, GPIO_OUT(tgi, gpio)),
tegra_gpio_readl(tgi, GPIO_IN(tgi, gpio)),
tegra_gpio_readl(tgi, GPIO_INT_STA(tgi, gpio)),
tegra_gpio_readl(tgi, GPIO_INT_ENB(tgi, gpio)),
tegra_gpio_readl(tgi, GPIO_INT_LVL(tgi, gpio)));
if (x != ' ')
x++;
if (y == 'Z') {
y = 'A';
x = 'A';
} else {
y++;
};
}
}
return 0;
}