1、主要参考
(1)格式说明:
点云库PCL学习——点云的格式、PCD文件的打开和显示
ROS知识:点云文件.pcd格式_无水先生的博客-CSDN博客_pcd文件
(2)点云滤波,对nan的滤波
Python点云数据处理(三)滤波与RANSAC分割 - 知乎
2、格式说明
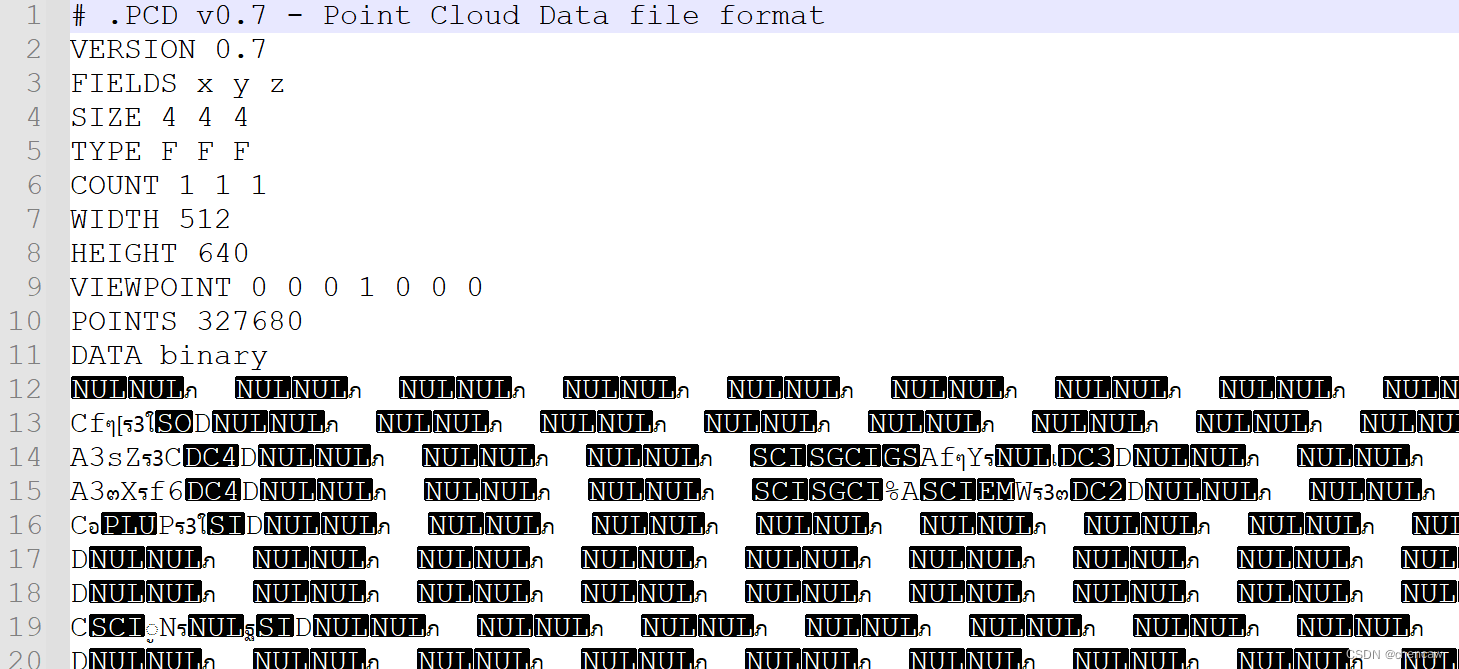
2.1直接用notepad++打开pcd文件后如下
2.2、格式说明
- VERSION是指定版本号
- FIELDS是指定每一个点所拥有的的维度名字,其它的格式如下
FIELDS x y z # XYZ data FIELDS x y z rgb # XYZ + colors- SIZE是每个维度占的字节大小,其中(unsigned char/char has 1 byte,unsigned short/short has 2 bytes,unsigned int/int/float has 4 bytes,double has 8 bytes)
- TYPE是每一个维度的类型,其中(I - 表示有符号类型 int8 (char)、int16 (short) 和 int32 (int);U -代表无符号类型 uint8 (unsigned char), uint16 (unsigned short), uint32 (unsigned int);F - 表示浮点类型)
- COUNT是指 指定每个维度有多少个元素。默认情况下,如果 COUNT 不存在,则所有维度的计数都设置为 1。
- WIDTH –用点的数量表示点云数据集的宽度。根据是有序点云还是无序点云,WIDTH有两层解释:(我的这个数据应该是有序的)
1)它能确定无序数据集的点云中点的个数(和下面的POINTS一样);
2)它能确定有序点云数据集的宽度(一行中点的数目)。
- HEIGHT –用点的数目表示点云数据集的高度。类似于WIDTH ,HEIGHT也有两层解释:1)它表示有序点云数据集的高度(行的总数);2)对于无序数据集它被设置成1(被用来检查一个数据集是有序还是无序)。
- VIEWPOINT是指定数据集中点云的获取视点。VIEWPOINT有可能在不同坐标系之间转换的时候应用,在辅助获取其他特征时也比较有用,例如曲面法线,在判断方向一致性时,需要知道视点的方位,视点信息被指定为平移(txtytz)+四元数(qwqxqyqz)。默认值是:VIEWPOINT 0 0 0 1 0 0 0
- POINTS是数据的总点数
- DATA是表示数据存储的格式。有ASCII 和 二进制(binary)
标题最后一行 (DATA) 之后的下一个字节被视为点云数据的一部分,并将被解释为点云数据的一部分。