2023年,汽车智能化开启新一轮加速度。
伴随着汽车行业变革从“电动化”的上半场进入“智能化”的下半场,中国正成为智能驾驶技术领域的引领者和汽车智能化的核心战场。
据高工智能汽车研究院发布的《2023-2025年中国智能汽车产业链市场数据预测报告》预测,2023-2025年,中国乘用车市场的L2(L2+)整体搭载率将分别达到35%、45%、53%。其中,在新能源市场的搭载率将分别达到58%、65%、70%。
可以说,L2持续保持爆发增长的底层逻辑,在2021年出现了转折点,具体表现为搭载L2车型均价首次低于L1,且这一差距在2022年继续拉大,这表明L2级辅助驾驶毫无疑问已经成为市场的主流。
随着汽车的智能化进入“L2普及、L2+冲刺发力、L3/L4小规模落地”的并行发展周期,智能驾驶赛道明显进入了多点爆发周期。
未来3年是汽车智能化关键窗口期
今年1-3月, 中国新能源乘用车的市场渗透率超过26%,完成了从“初期市场”向“早期大众市场”的跨沟,电动化的淘汰赛早已开始,智能化的淘汰赛则正在积聚能量、蓄势待发。
在百度Apollo看来,到2026年,搭载了记忆泊车、高速领航、城市领航等L2+级别高阶智能驾驶系统车型的市场渗透率将超过15%,产业迎来智能化的跨沟期。届时,高阶智能驾驶市场的爆发将引发汽车产业新一轮洗牌,未来3年成为关键窗口期。
“2026年,当智能化完成市场‘跨沟’后,没有智能驾驶能力的汽车将难以进入用户的购车清单。”百度集团资深副总裁、智能驾驶事业群组总裁李震宇表示。

可以说,谁能率先为消费者提供安全安心、有真实获得感的智能驾驶体验,谁就有可能在下半场智能化的竞争中获得先机。
然而,与传统的以机械零件为主的系统相比,智能化系统是一个以硬件为载体、由算法软件驱动的大规模动态系统,其复杂性呈指数级增长态势。
具体而言,软件系统具有动态可变性、非线性、可修改升级等特征,这些特征与智能驾驶系统独特的软硬一体、持续演进、数据驱动等特点叠加在一起,使智能驾驶系统成为一个极具技术挑战的复杂产品。
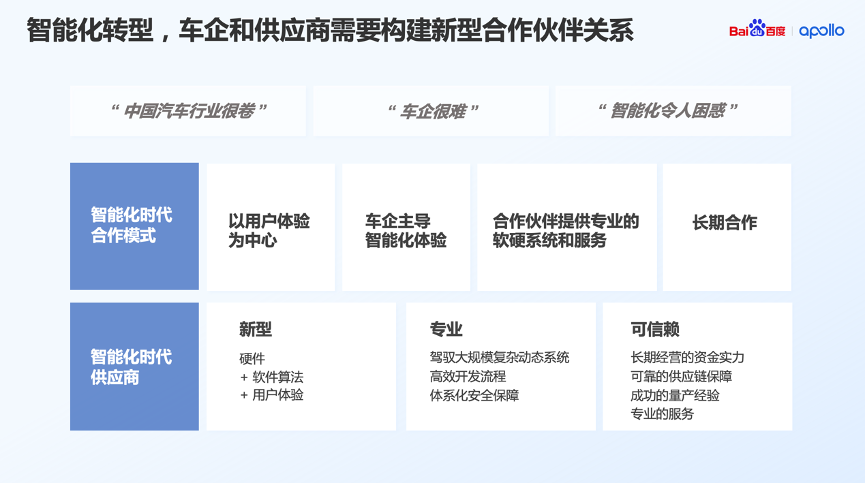
因此,在智能汽车时代,需要的不仅是智能化产品的升级,更是在挑战传统整车和供应商之间既定的关系模式。这无论是对科技企业还是车企而言,都是一场全新的产业革命。
这意味着产业链中单一角色很难完成所有的硬件研发和智能技术积累,行业正在经历没有石头可摸的“过河”期。
与此同时,车企自研热潮也在退去,从坚持“全栈自研”开始转变为“全栈可控”。
“智能汽车是多产业、多技术协同融合发展的新物种,汽车智能化涉及的技术很多、门槛也不低,单一的角色很难完成所有的研发和持续的技术投入。为了把产品体验做好,当前车企需要的不只是零部件供应商、更是能让灵魂与躯体融为一体的合作伙伴。”百度集团副总裁、智能汽车事业部总经理储瑞松表示。
当业界都在谈论各自的角色定位、业务定位时,百度站在消费者角度,提出应以提供安全安心、有真实获得感的智能化体验为目标,构建新型合作模式。
基于此,百度选择了一套生态打法。
目前,在智能汽车量产领域,Apollo已经初步建立起开放的合作伙伴生态体系。
例如,黑芝麻智能国产芯片成为百度Apollo智能驾驶首选国产芯片合作伙伴,Apollo Highway Driving Pro将部署到华山二号A1000芯片算力平台上,并将在今年第三季度正式发布。
作为国产智驾算法与国产芯片的一次强强联合,这将进一步加速中国汽车智造升级。

面向广大车企,百度Apollo还发布《百度智能驾驶开放白皮书》,宣布开放体验定义、开放自主体验进化、开放全周期OTA服务、开放和车企共创成长,在保障用户体验的目标下,改变行业以往“一锤子买卖”的形式,以更开放的态度陪伴车企、并助力车企取得智能驾驶的领先地位和商业成功。
百度“驾舱图”产品矩阵亮剑
除了表明在智能汽车格局巨变下的定位,百度还展示了其在智能驾驶、智能座舱、智能地图三大业务板块的最新进展,旨在为消费者提供愉悦智行的智能化体验,帮助车企赢得智能化竞速赛。
在智能驾驶方面,百度Apollo推出旗舰产品城市智驾Apollo City Driving Max,搭载两颗英伟达Orin X,算力达508TOPS,这是国内唯一一款使用纯视觉感知就能在城市道路上带给用户连贯体验的产品,目前首发车的产品定义还包括激光雷达,以实现“纯视觉+激光雷达”真感知冗余。
依托百度过去在地图业务上的积淀,该产品使用的“轻量级高精地图”比起行业通用的传统高精地图要“轻”近80%,能够以更合理的成本快速推进城市泛化。

近期,其行泊一体产品Apollo Highway Driving Pro也完成了产品升级,算力平台升级至单TDA4-VH平台,相比双TDA4-VM,新产品的AI算力、CPU算力使用率都不到50%,能在更低算力、更低成本条件下实现更高阶的行泊一体功能,是行业里优选的高速智驾、行泊一体方案。
基于此,百度Apollo与岚图深度合作了首款车型——新款岚图FREE,搭载Apollo Highway Driving Pro智驾产品,包含高速领航、城市驾驶辅助、全场景高效泊车等辅助驾驶功能。
此外,百度Apollo还升级了自主泊车产品Apollo Parking,新产品在Top5停车位类型的泊车成功率超过99%,泊入垂直车位仅需28秒,真正做到了让用户拥有获得感,降低新手司机泊车难度,提升老司机泊车效率。
智能座舱方面,百度Apollo拥有小度车载OS、小度语音SDK。其中,小度车载OS作为整包方案,能快速搭载量产,小度语音SDK则基于大模型本地化部署,能实现全时全双工、百毫秒级响应,车企可以通过小度语音SDK定义并实现领先的智舱体验。
与此同时,百度文心一言大模型已经开启邀请测试,百度也在探索在出行场景下,利用文心大模型能力重塑用户与智舱的关系,打造新一代AI智舱体验。

智能地图方面,百度Apollo升级了车载导航地图,其质量、性能、数据实时性都有不同程度的提升;发布人机共驾地图新产品,为人和智驾系统交互提供新的人机界面,提升用户对智能驾驶的信赖感;高精地图升级至OneMap一张图,能够快速动态更新地图数据。
据介绍,进入汽车行业后,百度创造性地将敏捷开发与ASPICE®遵循的传统V模型进行深度融合,并通过了ASPICE® CL3的组织级评估认证,成为行业内首家实现二者深入融合、并通过权威机构认证的Tier 1。
目前,百度Apollo的汽车智能化解决方案已在31个汽车品牌的134个车型上实现量产,累计搭载超700万辆,稳居Tier 1前列。
依托百度领先的自动驾驶技术,凭借完善的产品矩阵,秉持更开放共赢的合作理念,在高质量交付和服务体系的保驾护航下,百度Apollo将以更领先的产品、更开放的态度、更优质的交付、更专业的服务,陪伴车企完成智能驾驶从“技术能力”向“产品体验”的落地,为用户提供愉悦智行的汽车驾乘体验。
“百度智能汽车事业部成立以来,始终围绕‘产品领先、体验愉悦、服务专业、生态开放’深入发展,致力于成为车企可以信赖的新型、专业、可以长期合作的伙伴。”储瑞松表示。
![[Linux] 基础IO](https://img-blog.csdnimg.cn/352b158f207c45168261a87475d54310.png)