看门狗:
在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造 成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会 造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测 的考虑,便产生了一种专门用于监测单片机程序运行状态的模块或者芯片,俗称“看门狗”
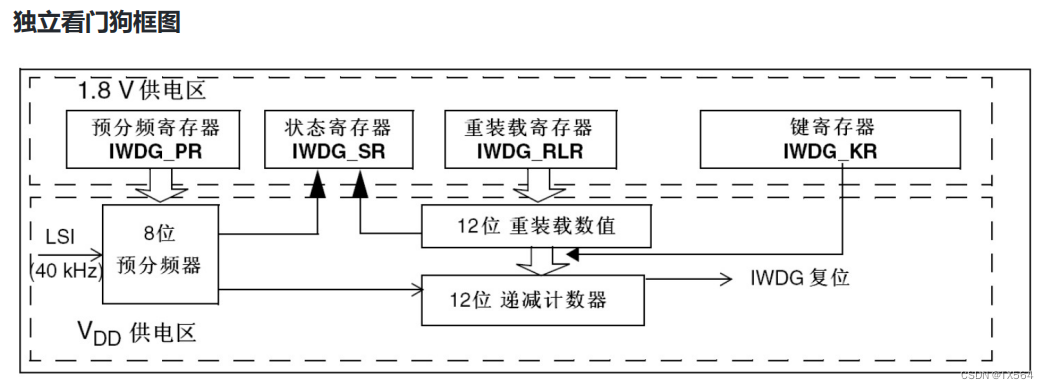
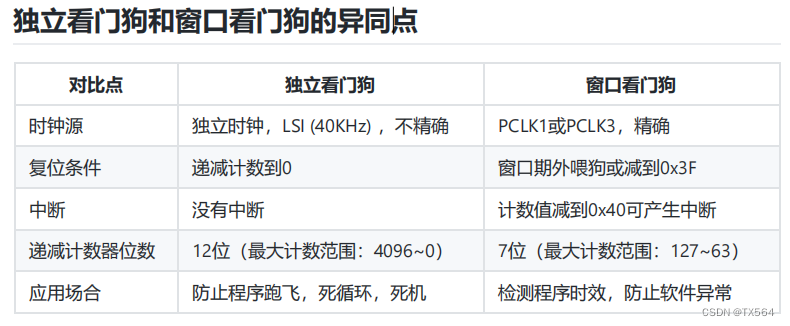
1.独立看门狗:
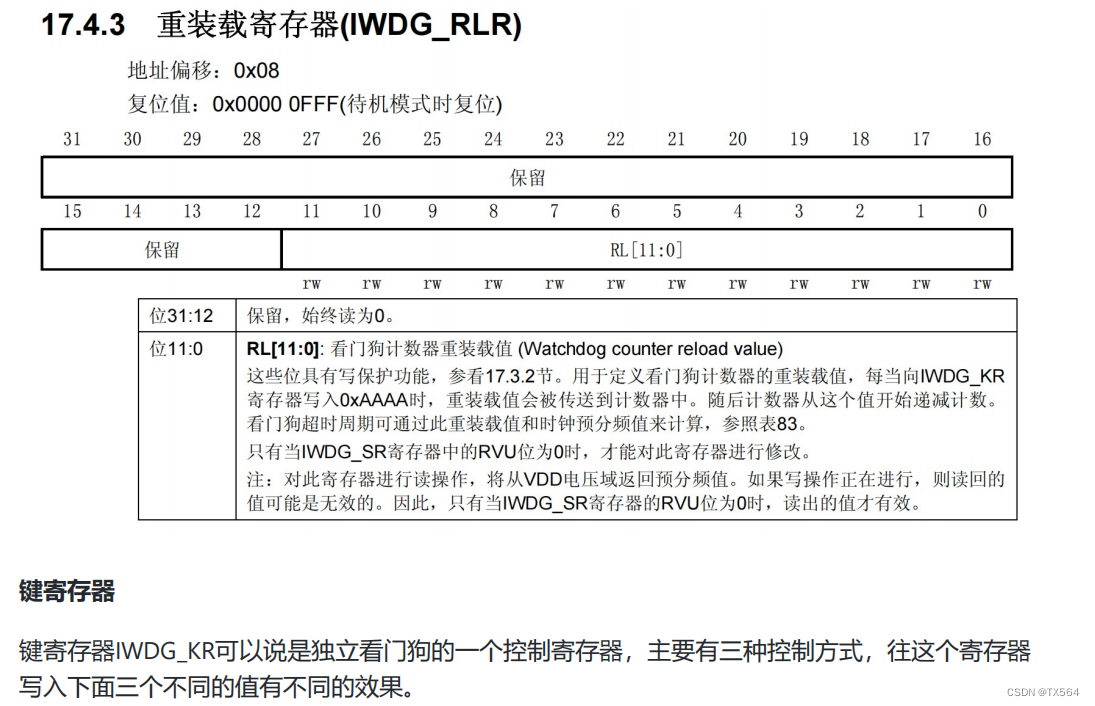
1·独立看门狗工作在主程序之外,能够完全独立工作,它的时钟是专用的低速时钟( LSI ),由VDD 电压供电, 在停止模式和待机模式下仍能工作。2·本质是一个 12 位的递减计数器,当计数器的值从某个值一直减到0的时候,系统就会产生一个复 位信号,即 IWDG_RESET 。
3·如果在计数没减到0之前,刷新了计数器的值的话,那么就不会产生复位信号,这个动作就是我们 经常说的喂狗。
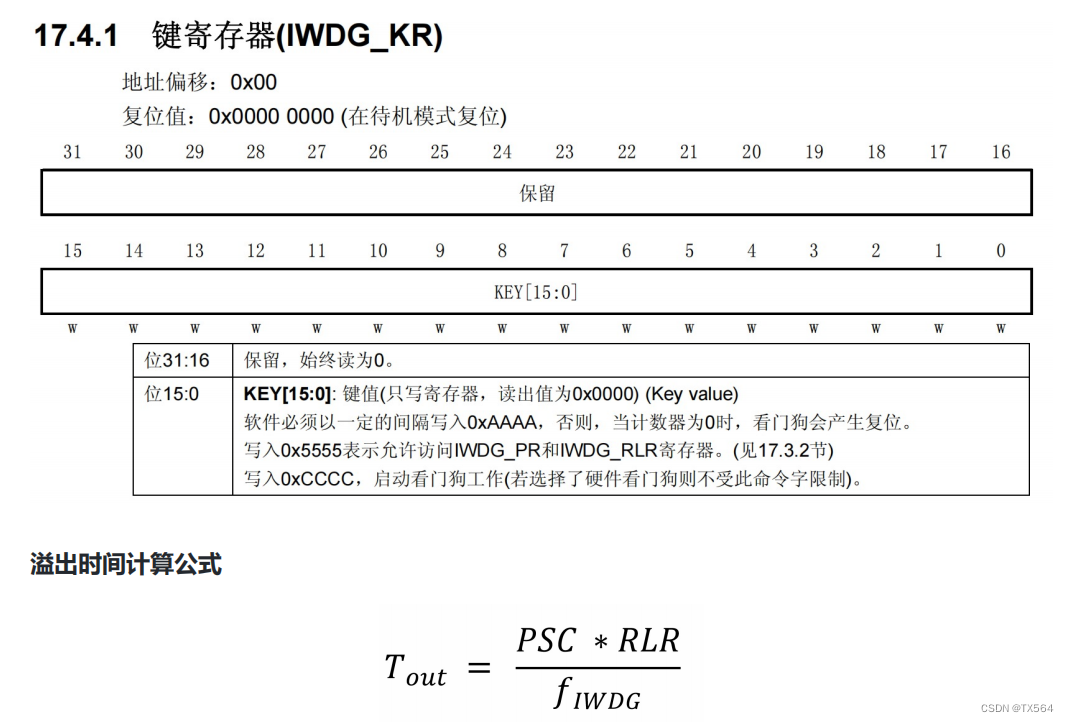
4·独立看门狗的时钟由独立的RC振荡器LSI提供,即使主时钟发生故障它仍然有效,非常独立。启用 IWDG后,LSI时钟会自动开启。LSI时钟频率并不精确,F1用40kHz。
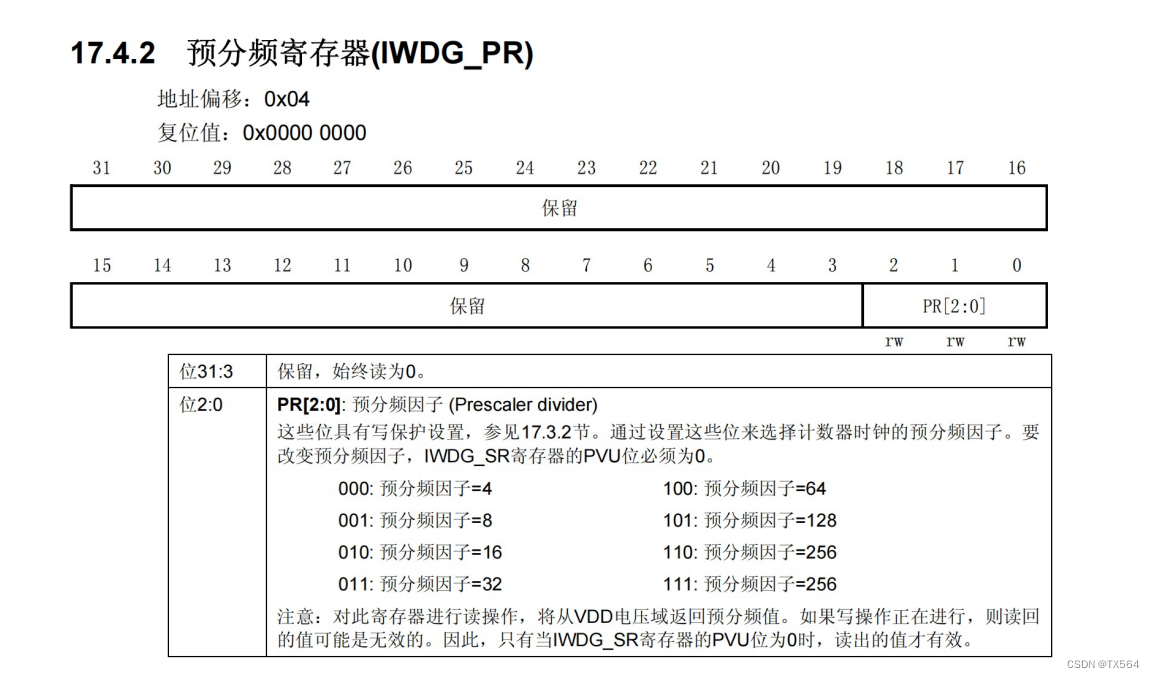
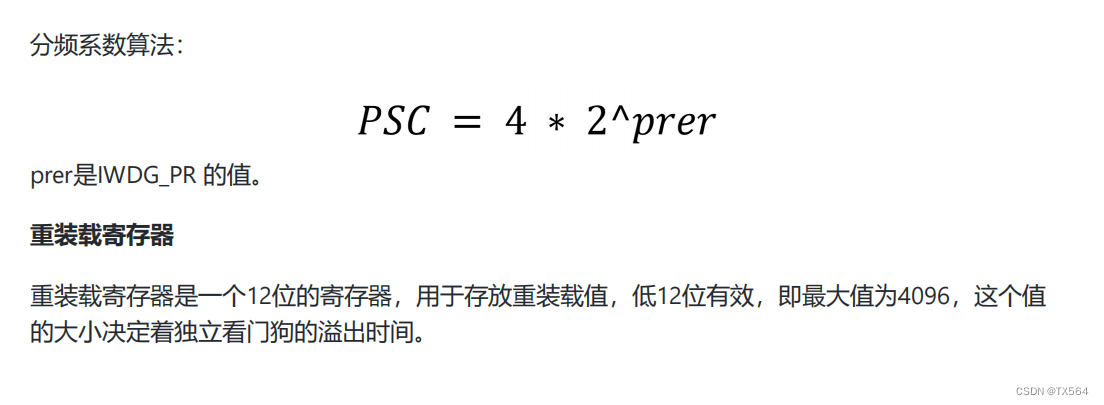
LSI 经过一个 8 位的预分频器得到计数器时钟。
独立看门狗的实验:
开启独立看门狗,溢出时间为1s,用按键喂狗
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_IWDG_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
HAL_UART_Transmit(&huart1,"程序启动。。。\r\n",strlen("程序启动。。。\r\n"),100);//如果不喂狗,会复位,串口一直发送程序启动。。。。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET)//如果按键按下
{
HAL_IWDG_Refresh(&hiwdg);//喂狗函数
}
HAL_Delay (50);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
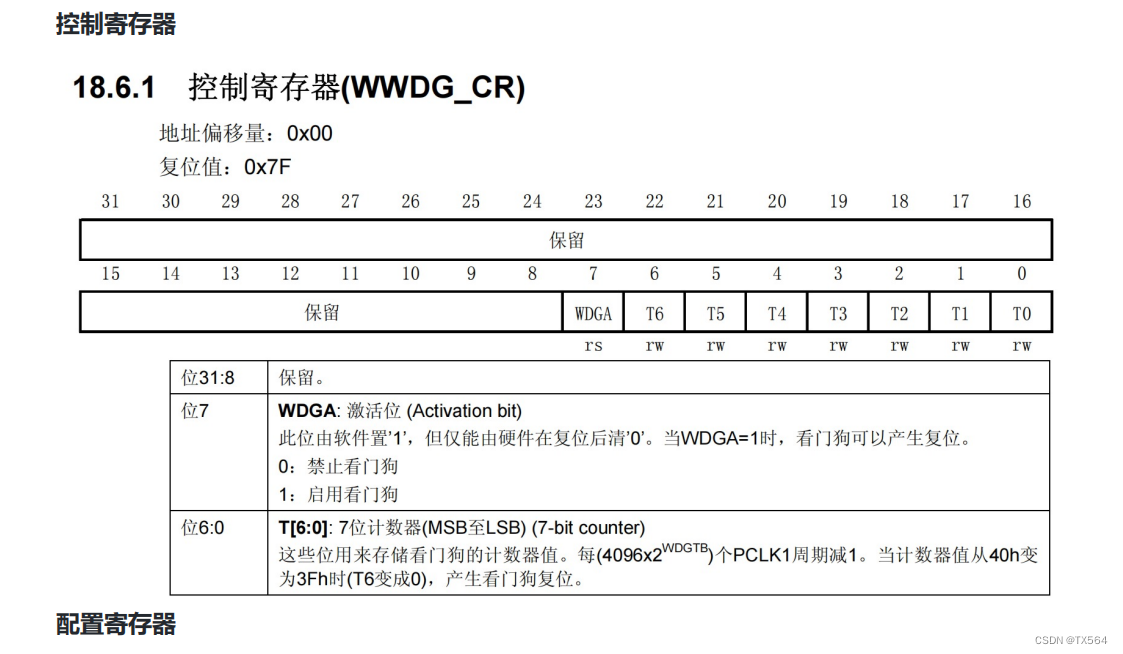
}2.窗口看门狗
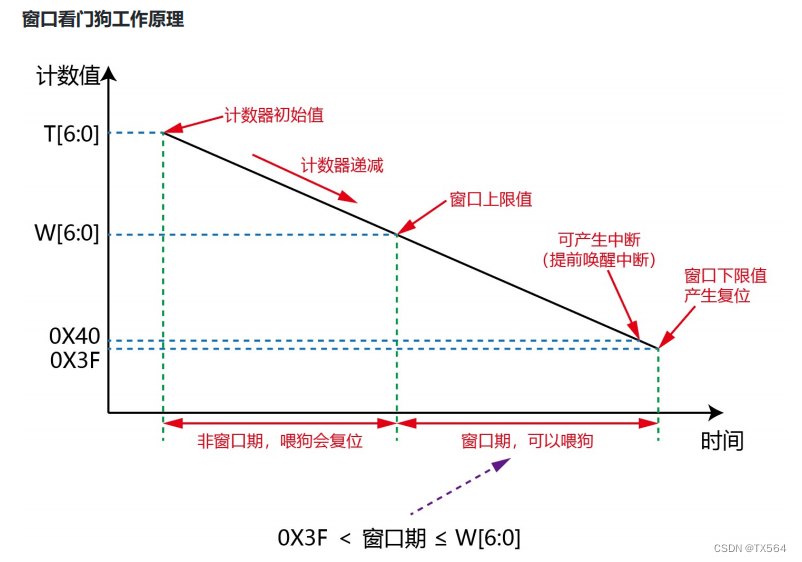
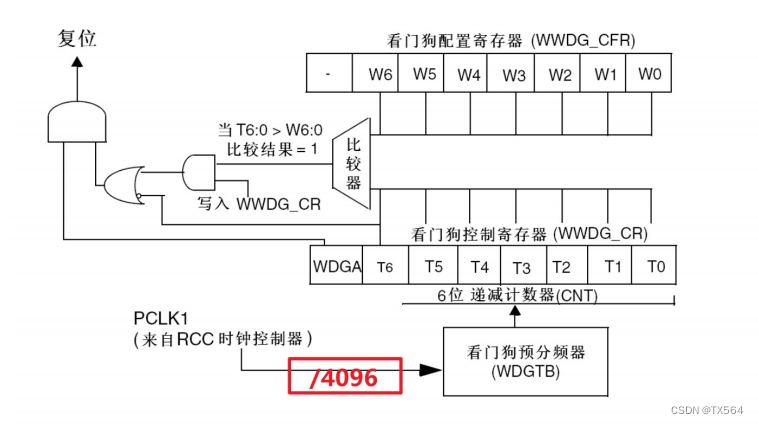
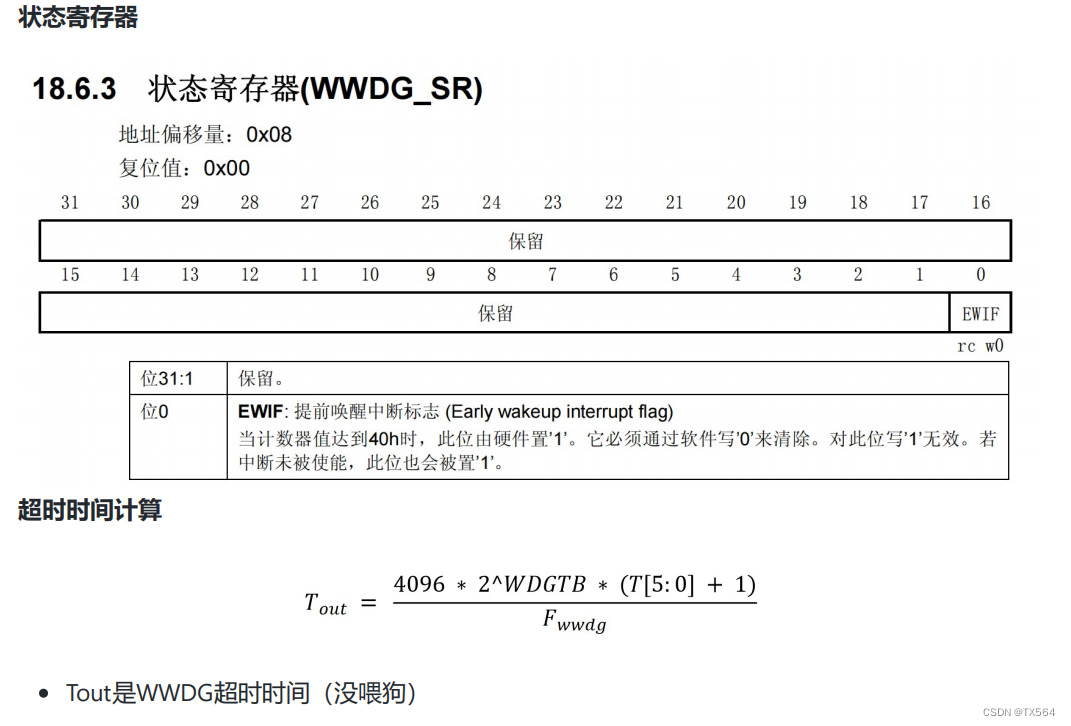
窗口看门狗用于监测单片机程序运行时效是否精准,主要检测软件异常,一般用于需要精准检测 程序运行时间的场合。 窗口看门狗的本质是一个能产生系统复位信号 和 提前唤醒中断 的 6位计数器。产生复位条件:1.当递减计数器值从 0x40 减到 0x3F 时复位(即 T6 位跳变到 0 )2.计数器的值大于 W[6:0] 值时喂狗会复位。产生中断条件:1.当递减计数器等于 0x40 时可产生提前唤醒中断 (EWI) 。2.在窗口期内重装载计数器的值,防止复位,也就是所谓的喂狗。
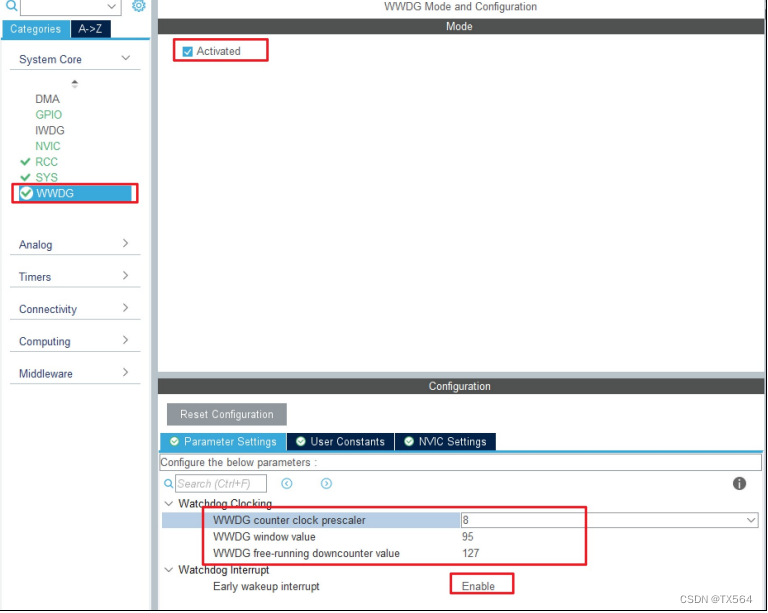
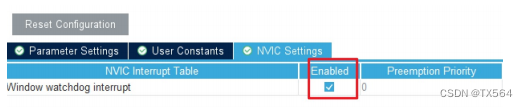
窗口看门狗实验
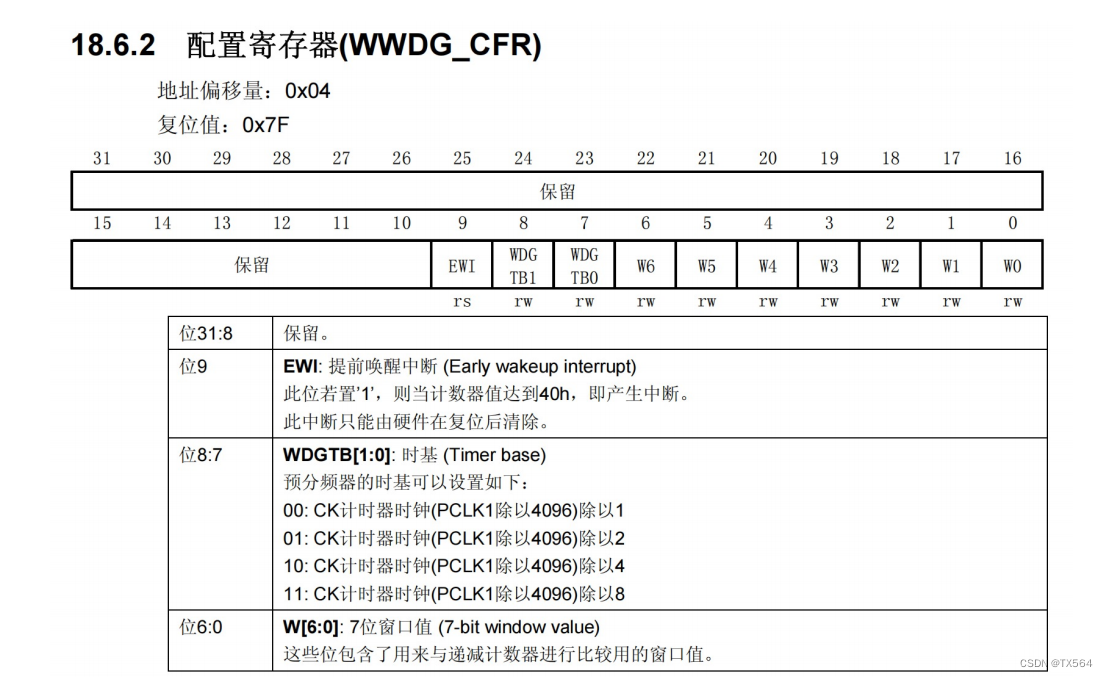
开启窗口看门狗,计数器值设置为 0X7F ,窗口值设置为 0X5F ,预分频系数为 8 。程序启动时点 亮 LED1 , 300ms 后熄灭。在提前唤醒中断服务函数进行喂狗,同时翻转 LED2 状态

void HAL_WWDG_EarlyWakeupCallback(WWDG_HandleTypeDef *hwwdg)
{
HAL_WWDG_Refresh(hwwdg);
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_9);
}
main函数
MX_GPIO_Init();
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_Delay(300);
MX_WWDG_Init();
while (1)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
HAL_Delay(40);
} 





![[Java]Cookie机制](https://img-blog.csdnimg.cn/img_convert/95a3396126b1e8d1a4e426a61b924cb7.webp?x-oss-process=image/format,png)





![[CVE漏洞复现系列]CVE2017_0147:永恒之蓝](https://img-blog.csdnimg.cn/ce05a22ec04d4f6b82b5389b40a178c1.png#pic_center)