1.安装准备
这里假设你已经装好了ROS2以及Moveit2(都用二进制安装就行,不用从源码安转),没有安装好的,可以按照鱼香ROS的教程安装,两三行命令就搞定了。
我的ROS2版本为humble,请根据你使用的实际版本替换。
安装pcl
sudo apt install libpcl-dev
sudo apt-get install ros-humble-pcl*
安装octomap相关库
sudo apt-get install ros-humble-octomap*
下面这个也安装一下
sudo apt-get install ros-humble-moveit-ros-perception
2.bt文件读取
octomap信息可能来自话题(由设备或者其他节点发布),或者从bt文件中读取。这里出于便于演示等原因,选择从文件中读取。文件读取时要注意使用的bt文件是txt还是bin的,要选择对应的读取方式,具体请查看代码。
这个octomap的功能还是用之前做的机械手环境来演示。
以下所使用到的【geb079.bt】文件来自于octomap的github。而【octomap.bt】文件是通过以下函数创建:
void createOctoMap()
{
// 创建OcTree对象,并设置分辨率为0.05
octomap::OcTree* tree = new octomap::OcTree(0.05);
// 设置障碍物的大小和位置
octomap::point3d origin(0, 0, 0);
octomap::point3d obstacle(0, 0, 0); // 1 1 1
double size = 0.2;
// 在OcTree中添加一个立方体障碍物
tree->updateNode(octomap::point3d(origin.x() + obstacle.x() - size, origin.y() + obstacle.y() - size, origin.z() + obstacle.z() - size), true);
tree->updateNode(octomap::point3d(origin.x() + obstacle.x() + size, origin.y() + obstacle.y() - size, origin.z() + obstacle.z() - size), true);
tree->updateNode(octomap::point3d(origin.x() + obstacle.x() + size, origin.y() + obstacle.y() + size, origin.z() + obstacle.z() - size), true);
tree->updateNode(octomap::point3d(origin.x() + obstacle.x() - size, origin.y() + obstacle.y() + size, origin.z() + obstacle.z() - size), true);
tree->updateNode(octomap::point3d(origin.x() + obstacle.x() - size, origin.y() + obstacle.y() - size, origin.z() + obstacle.z() + size), true);
tree->updateNode(octomap::point3d(origin.x() + obstacle.x() + size, origin.y() + obstacle.y() - size, origin.z() + obstacle.z() + size), true);
tree->updateNode(octomap::point3d(origin.x() + obstacle.x() + size, origin.y() + obstacle.y() + size, origin.z() + obstacle.z() + size), true);
tree->updateNode(octomap::point3d(origin.x() + obstacle.x() - size, origin.y() + obstacle.y() + size, origin.z() + obstacle.z() + size), true);
// 将OcTree保存为octomap.bt文件
std::string filename = "octomap.bt";
auto ret = tree->writeBinary(filename);
// auto ret = tree->write(filename);
qDebug() << "write octomap.bt:" << ret;
// 删除OcTree对象
delete tree;
}
假如要将读取、接收到的octomap通过代码的方式“输出”到moveit中,让其参与碰撞检测、路径规划,一般有两种方式:
2.1通过moveit_msgs::msg::CollisionObject加入场景中
这种方式,是通过 octomap–》pointCloud–》mesh 的方式进行的,比较麻烦。而且在pointCloud–》mesh这一步遇到了一些问题,转出来的是面片,而非实体mesh。后面再研究研究
// 这个函数还是有问题的,弄出来的是面片,而不是mesh,后续还需要改进
void pclPointCloudToShapeMsgsMesh(const pcl::PointCloud<pcl::PointXYZ> *cloud,
shape_msgs::msg::Mesh &mesh)
{
// 创建三角形索引数组
pcl::PolygonMesh triangles;
pcl::Vertices vertices;
for (size_t i = 0; i < cloud->size() - 2; ++i)
{
vertices.vertices.clear();
vertices.vertices.push_back(i);
vertices.vertices.push_back(i + 1);
vertices.vertices.push_back(i + 2);
triangles.polygons.push_back(vertices);
}
// 拷贝点云数据到Mesh消息中
mesh.vertices.resize(cloud->size());
for (int i = 0; i < cloud->size(); ++i)
{
geometry_msgs::msg::Point p;
p.x = (*cloud)[i].x;
p.y = (*cloud)[i].y;
p.z = (*cloud)[i].z;
mesh.vertices[i] = p;
}
// 拷贝三角形索引数据到Mesh消息中
mesh.triangles.resize(triangles.polygons.size());
for (int i = 0; i < triangles.polygons.size(); ++i)
{
shape_msgs::msg::MeshTriangle t;
t.vertex_indices[0] = triangles.polygons[i].vertices[0];
t.vertex_indices[1] = triangles.polygons[i].vertices[1];
t.vertex_indices[2] = triangles.polygons[i].vertices[2];
mesh.triangles[i] = t;
}
}
// 将octoMap作为碰撞物体导入到moveit中
void appendCollisionObject(QString octoFile)
{
auto const node = std::make_shared<rclcpp::Node>(
"hello_moveit",
rclcpp::NodeOptions().automatically_declare_parameters_from_overrides(true));
//创建 MoveIt MoveGroup Interface,用于连接、获取MoveGroup的信息
using moveit::planning_interface::MoveGroupInterface;
auto move_group_interface = MoveGroupInterface(node, "my_group"); // 估计要依附一个节点,才能进行interface的创建
// 将碰撞物体加到scene中
moveit::planning_interface::PlanningSceneInterface planning_scene_interface;
auto frameId = move_group_interface.getPlanningFrame();
qDebug() << "frame id:" << frameId.data();
{
std::shared_ptr<octomap::OcTree> octree = std::make_shared<octomap::OcTree>(octomap::OcTree(octoFile.toStdString()));
if (octree == nullptr) {
throw std::runtime_error("Could not read Octomap data from file " + octoFile.toStdString());
}
// octTree转点云
pcl::PointCloud<pcl::PointXYZ> cloud;
// Traverse all the leaf nodes and add them to the point cloud if they are occupied
for (auto it = octree->begin_leafs(); it != octree->end_leafs(); ++it) {
if (octree->isNodeOccupied(*it)) {
pcl::PointXYZ pt;
pt.x = it.getX();
pt.y = it.getY();
pt.z = it.getZ();
cloud.points.push_back(pt);
}
}
// 点云转mesh
shape_msgs::msg::Mesh output_mesh;
pclPointCloudToShapeMsgsMesh(&cloud, output_mesh);
geometry_msgs::msg::Pose octomap_pose;
octomap_pose.orientation.w = 1.0;
octomap_pose.position.x = 0.2;
octomap_pose.position.y = 0.2;
octomap_pose.position.z = 0.2;
// 直接往octomap_object里面塞mesh
moveit_msgs::msg::CollisionObject octomap_object;
octomap_object.id = "my_octomap_object";
octomap_object.header.frame_id = frameId;
octomap_object.meshes.push_back(output_mesh);
octomap_object.mesh_poses.push_back(octomap_pose);
octomap_object.operation = moveit_msgs::msg::CollisionObject::ADD;
// 将碰撞对象添加到collision_objects中,然后传递给applyCollisionObjects函数
std::vector<moveit_msgs::msg::CollisionObject> collision_objects;
collision_objects.push_back(octomap_object);
qDebug() << "applyCollisionObjects" << planning_scene_interface.applyCollisionObjects(collision_objects);
}
}
2.2通过moveit_msgs::msg::PlanningScene加入(替换)场景
目前我使用的是这种,效果良好。不过可能会存在一些冲突,等后面研究得更加透彻之后再修改吧。
void appendScene(QString octoFile)
{
auto const node = std::make_shared<rclcpp::Node>(
"hello_moveit1",
rclcpp::NodeOptions().automatically_declare_parameters_from_overrides(true));
//创建 MoveIt MoveGroup Interface,用于连接、获取MoveGroup的信息
using moveit::planning_interface::MoveGroupInterface;
auto move_group_interface = MoveGroupInterface(node, "my_group"); // 估计要依附一个节点,才能进行interface的创建
auto frameId = move_group_interface.getPlanningFrame();
// Load an OctoMap from file
octomap::OcTree* octree = new octomap::OcTree(octoFile.toStdString());
// 将Octomap数据转换为ROS2消息
octomap_msgs::msg::Octomap octomap_msg;
octomap_msgs::binaryMapToMsg(*octree, octomap_msg);
// 创建PlanningSceneMonitor实例, 用于获取 AllowedCollisionMatrix
auto planning_scene_monitor = std::make_shared<planning_scene_monitor::PlanningSceneMonitor>(node,
"robot_description");
collision_detection::AllowedCollisionMatrix acm = planning_scene_monitor->getPlanningScene()->getAllowedCollisionMatrix();
// // 假设我们需要允许"obstacle_1"和"obstacle_2"之间的碰撞
// acm.setEntry("obstacle_1", "obstacle_2", true);
// 将 collision_detection::AllowedCollisionMatrix 转成 moveit_msgs::msg::AllowedCollisionMatrix
moveit_msgs::msg::AllowedCollisionMatrix acm_msg;
acm.getMessage(acm_msg);
moveit_msgs::msg::PlanningScene planning_scene_msg;
planning_scene_msg.world.octomap.header.frame_id = frameId; // Replace "map" with your frame ID
planning_scene_msg.world.octomap.origin.orientation.w = 1.0;
planning_scene_msg.world.octomap.octomap = octomap_msg;
planning_scene_msg.allowed_collision_matrix = acm_msg;
// 将PlanningScene 加(替换)到moveit中
moveit::planning_interface::PlanningSceneInterface planning_scene_interface;
planning_scene_interface.applyPlanningScene(planning_scene_msg);
}
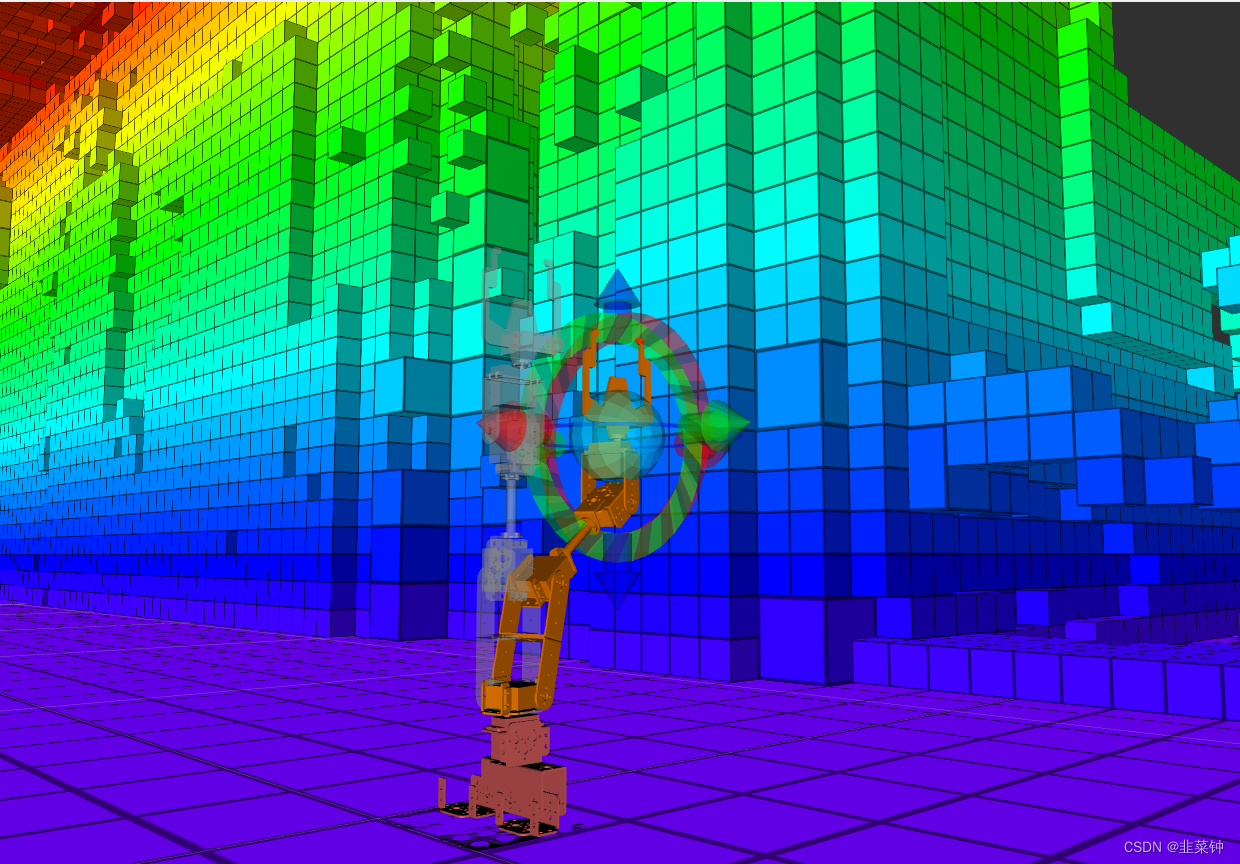
3.效果演示
视频演示可以看这里:【MoveIt2中导入octomap】
参考
https://blog.csdn.net/qq_27865227/article/details/125002311




![[Linux]管理用户和组](https://img-blog.csdnimg.cn/7bcdf73fe93e4fdcb9fd8eddbdf44997.png)