大家好,这里是bang_bang,今天来分享下内存管理的知识。
目录
1.C/C++内存分布
2.C++内存管理方式
2.1new/delete操作内置类型
2.2new/delete操作自定义类型
3.operator new与operator delete函数
3.1operator new
3.2operator delete
4.new和delete的实现原理
4.1内置类型
4.2自定义类型
1.C/C++内存分布
首先我们要想了解内存管理,就要了解内存划分的区域都是什么。
内存划分5个区域:代码区,常量区,静态区,堆区,栈区。这里推荐一个大佬的文章:https://blog.csdn.net/u014470361/article/details/79297601
来我们来举个🌰:
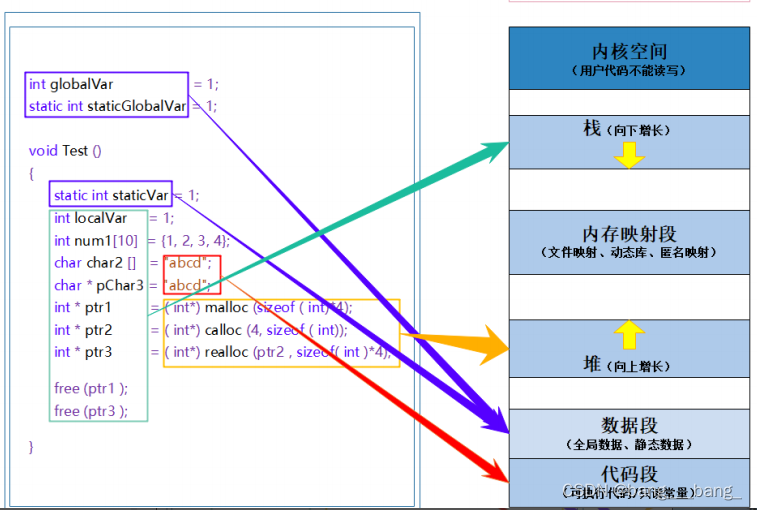
分析下各变量存储位置。
int globalVar = 1; static int staticGlobalVar = 1; void Test() { static int staticVar = 1; int localVar = 1; int num1[10] = { 1, 2, 3, 4 }; char char2[] = "abcd"; const char* pChar3 = "abcd"; int* ptr1 = (int*)malloc(sizeof(int) * 4); int* ptr2 = (int*)calloc(4, sizeof(int)); int* ptr3 = (int*)realloc(ptr2, sizeof(int) * 4); free(ptr1); free(ptr3); }选项: A.栈 B.堆 C.数据段(静态区) D.代码段(常量区)globalVar在哪里?____ staticGlobalVar在哪里?____staticVar在哪里?____ localVar在哪里?____num1 在哪里?____char2在哪里?____ *char2在哪里?___pChar3在哪里?____ *pChar3在哪里?____ptr1在哪里?____ *ptr1在哪里?____
答案:
globalVar在哪里?__C__ staticGlobalVar在哪里?__C__
staticVar在哪里?__C__ localVar在哪里?__A__
num1 在哪里?__A__
char2在哪里?__A__ *char2在哪里?__A_
pChar3在哪里?__A__ *pChar3在哪里?__D__
ptr1在哪里?__A__ *ptr1在哪里?__B__
静态变量在静态区,临时变量在栈区。 malloc,realloc,calloc开辟的在堆区。 char2是一个字符数组,在栈区开辟了一个新空间,将常量字符串的内容拷贝过来初始化这块空间, 所以*char2也是在栈区。 pchar3是一个指向常量字符串的指针,解引用*pchar3是常量字符串在常量区。说明:1. 栈又叫堆栈--非静态局部变量/函数参数/返回值等等, 栈是向下增长的 。2. 内存映射段是高效的I/O映射方式,用于装载一个共享的动态内存库。用户可使用系统接口创建共享共享内存,做进程间通信。3. 堆用于程序运行时动态内存分配, 堆是上增长的 。4. 数据段--存储全局数据和静态数据。5. 代码段--可执行的代码/只读常量。
这里留下一个面试题,大家可以思考思考,查阅相关内容。
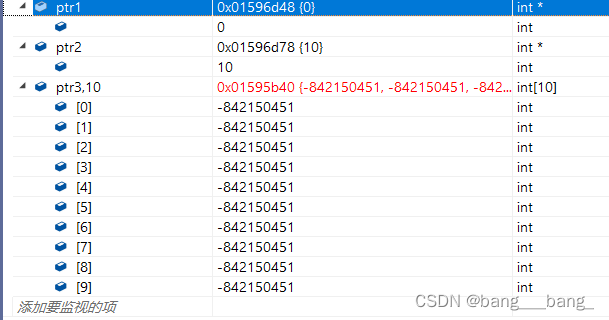
malloc/calloc/realloc的区别?
2.C++内存管理方式
C++提出了自己的内存管理方式:通过new和delete
操作符
进行动态内存管理。
2.1new/delete操作内置类型
void Test2()
{
//动态申请1个int类型的空间
int* ptr1 = new int();
//动态申请1个int类型的空间并初始化为10
int* ptr2 = new int(10);
//动态申请10个int类型的空间
int* ptr3 = new int[10];
delete ptr1;
delete ptr2;
//匹配[],释放10个空间
delete[] ptr3;
}
注意:申请和释放单个元素的空间,使用new和delete操作符。
申请和释放连续的空间,使用
new[ ]和delete[ ]。注意:匹配起来使用。
2.2new/delete操作自定义类型
new/delete 和 malloc/free最大区别是 new/delete对于[自定义类型]除了开空间还会调用构造函数和析构函数。
class A
{
public:
A(int a = 0)
: _a(a)
{
cout << "A():" << this << endl;
}
~A()
{
cout << "~A():" << this << endl;
}
private:
int _a;
};
int main()
{
// new/delete 和 malloc/free最大区别是 new/delete对于[自定义类型]除了开空间还会调用构造函数和析构函数
A* p1 = (A*)malloc(sizeof(A));
A* p2 = new A(1);
free(p1);
delete p2;
return 0;
} 运行可以看到,构造函数和析构函数被new和delete调用了。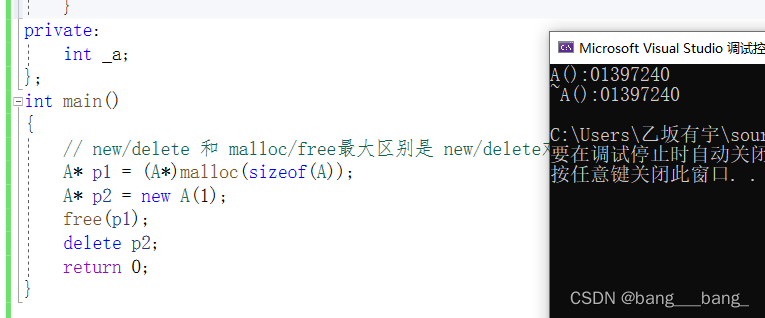
2.1中我们强调要[ ]匹配,我们举2个习题来看看:
以下代码中,A 的构造函数和析构函数分别执行了几次: ( ) A*pa=new A[10]; delete []pa;答案:10,10
以下代码中,A 的构造函数和析构函数分别执行了几次: ( ) A*pa=new A[10]; delete pa;答案:10,1
3.operator new与operator delete函数
3.1operator new
/*
operator new:该函数实际通过malloc来申请空间,当malloc申请空间成功时直接返回;申请空间
失败,尝试执行空间不足应对措施,如果该应对措施用户设置了,则继续申请,否则抛异常。
*/
void* __CRTDECL operator new(size_t size) _THROW1(_STD bad_alloc)
{
// try to allocate size bytes
void* p;
while ((p = malloc(size)) == 0)
if (_callnewh(size) == 0)
{
// report no memory
// 如果申请内存失败了,这里会抛出bad_alloc 类型异常
static const std::bad_alloc nomem;
_RAISE(nomem);
}
return (p);
}3.2operator delete
/*
operator delete: 该函数最终是通过free来释放空间的
*/
void operator delete(void* pUserData)
{
_CrtMemBlockHeader* pHead;
RTCCALLBACK(_RTC_Free_hook, (pUserData, 0));
if (pUserData == NULL)
return;
_mlock(_HEAP_LOCK); /* block other threads */
__TRY
/* get a pointer to memory block header */
pHead = pHdr(pUserData);
/* verify block type */
_ASSERTE(_BLOCK_TYPE_IS_VALID(pHead->nBlockUse));
//free!!
_free_dbg(pUserData, pHead->nBlockUse);
__FINALLY
_munlock(_HEAP_LOCK); /* release other threads */
__END_TRY_FINALLY
return;
}
/*
free的实现
*/
#define free(p) _free_dbg(p, _NORMAL_BLOCK)
通过上述两个全局函数的实现知道,operator new 实际也是通过malloc来申请空间,如果
malloc申请空间成功就直接返回,否则执行用户提供的空间不足应对措施,如果用户提供该措施
就继续申请,否则就抛异常。operator delete 最终是通过free来释放空间的。
4.new和delete的实现原理
4.1内置类型
如果申请的是内置类型的空间, new 和 malloc , delete 和 free 基本类似,不同的地方是:new/delete 申请和释放的是单个元素的空间, new[] 和 delete[] 申请的是连续空间,而且 new 在申请空间失败时会抛异常,malloc 会返回 NULL 。
4.2自定义类型
- new的原理
1. 调用operator new函数申请空间.2. 在申请的空间上执行构造函数,完成对象的构造.
- delete的原理
1. 在空间上执行析构函数,完成对象中资源的清理工作.2. 调用operator delete函数释放对象的空间.
- new T[N]的原理
1. 调用operator new[]函数,在operator new[]中实际调用operator new函数完成N个对象空间的申请.2. 在申请的空间上执行N次构造函数.
- delete[]的原理
1. 在释放的对象空间上执行N次析构函数,完成N个对象中资源的清理.2. 调用operator delete[]释放空间,实际在operator delete[]中调用operator delete来释放空间.
今天的分享就到这里,希望大家能有所收获。