前言:
定时器的三大功能还剩下最后一个捕获,而这在蓝桥杯嵌入式开发板上也有555定时器可以作为信号发生器供定时器来测量。
原理图部分:


开发板上集成了两个555定时器,一个通过跳线帽跟PA15相连,最终接到了旋钮R40上,另一个接到了旋钮R39上。了解了这些,我们下一步到STM32Cubemx上配置就有数了。
STM32Cubemx配置:
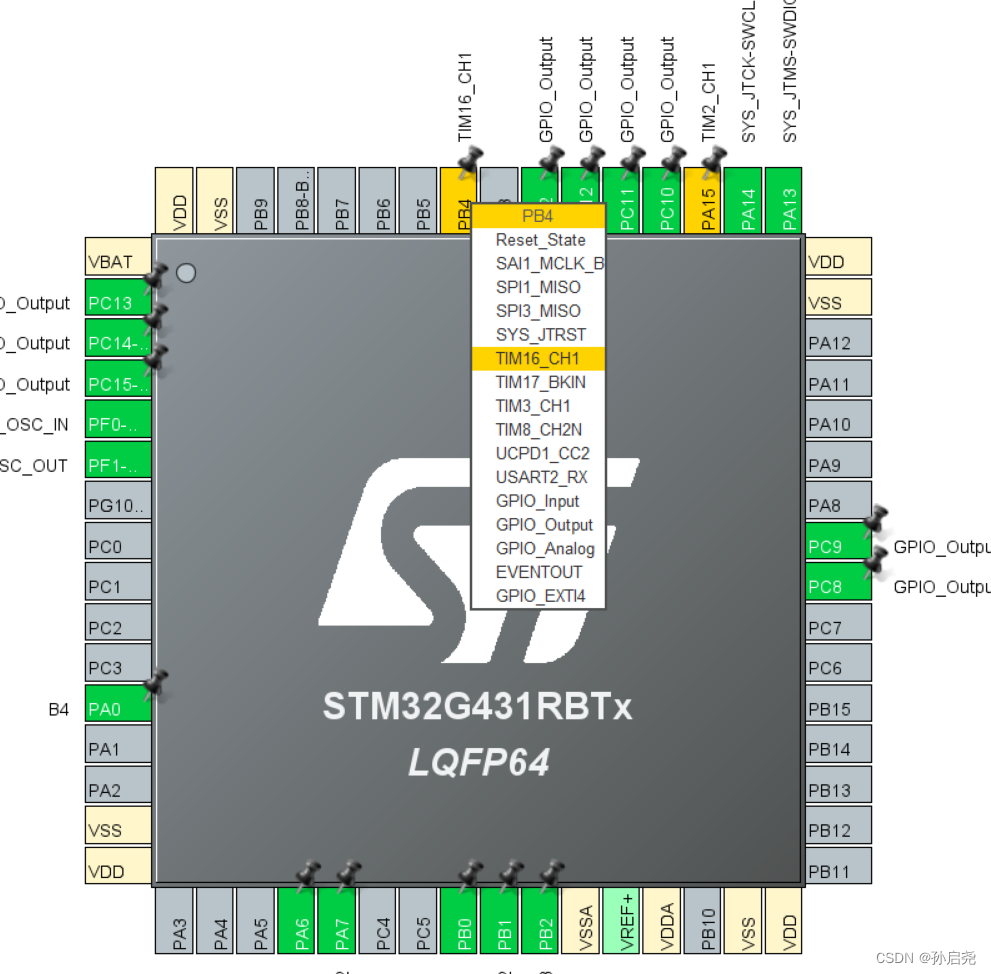
我个人是将PA15设定为了TIM2_CH1

PB4设定为了TIM16_CH1
接下来,我们进入TIM2和TIM16的配置界面,配置对应的通道

然后我们再配置一下响应的参数,分频系数我们设置为79,重装载值,我们就不需要改了

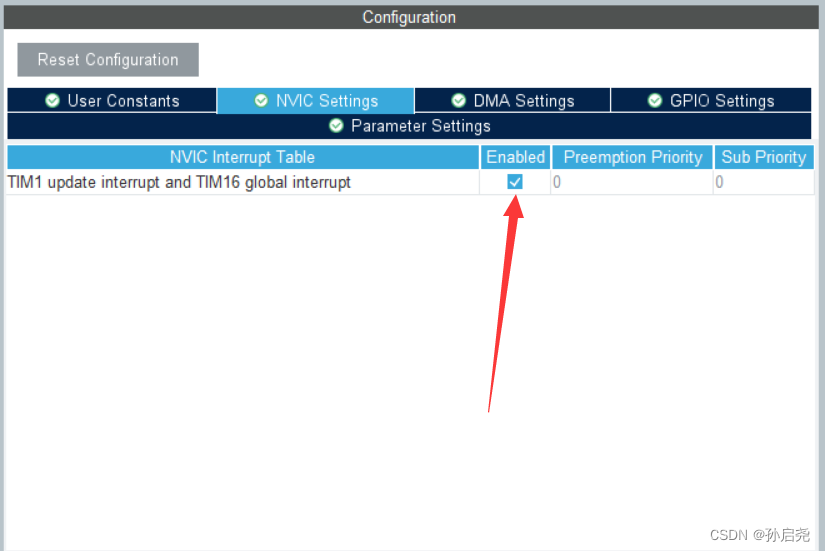
然后我们再打开中断

接下来,我们对PB4进行配置,点击TIM16

设置分频系数和使能中断

代码部分:
在原有的interrupt.c文件里面,我们新增加一个回调函数HAL_TIM_IC_CaptureCallback,这个回调函数在stm32g4xx_hal_tim.h的2550行的位置,如果大家记不住的话,可以去看一下
然后,我们可以重新书写回调函数的代码了
unsigned int ccr1_val1 = 0,ccr1_val2 = 0;
unsigned int frq1 = 0,frq2 = 0;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) //中断回调函数
{
if(htim->Instance == TIM2) //PA15
{
ccr1_val1 = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1);
__HAL_TIM_SetCounter(htim,0); //读完之后,将计时值清零
frq1 = (80000000/80)/ccr1_val1; //计算频率
HAL_TIM_IC_Start(htim,TIM_CHANNEL_1);
}
if(htim->Instance == TIM16) //PB4
{
ccr1_val2 = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1);
__HAL_TIM_SetCounter(htim,0); //读完之后,将计时值清零
frq2 = (80000000/80)/ccr1_val2; //计算频率
HAL_TIM_IC_Start(htim,TIM_CHANNEL_1);
}
}然后在main.c里面开启定时器中断
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1); //开启定时器,R39 -> PB4
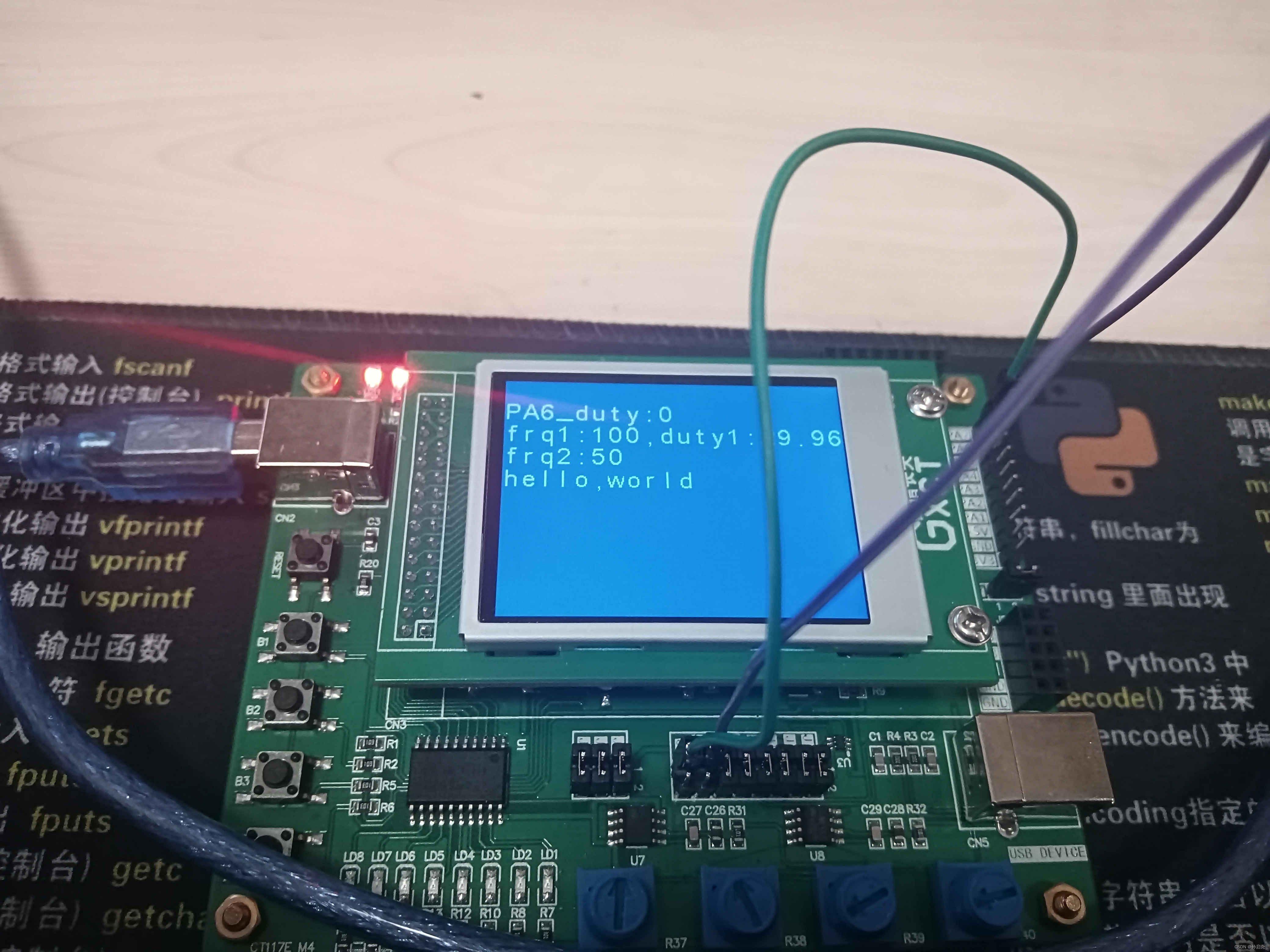
HAL_TIM_IC_Start_IT(&htim16,TIM_CHANNEL_1); //开启定时器,R40 -> PA15这就是最终的一个效果

补发:
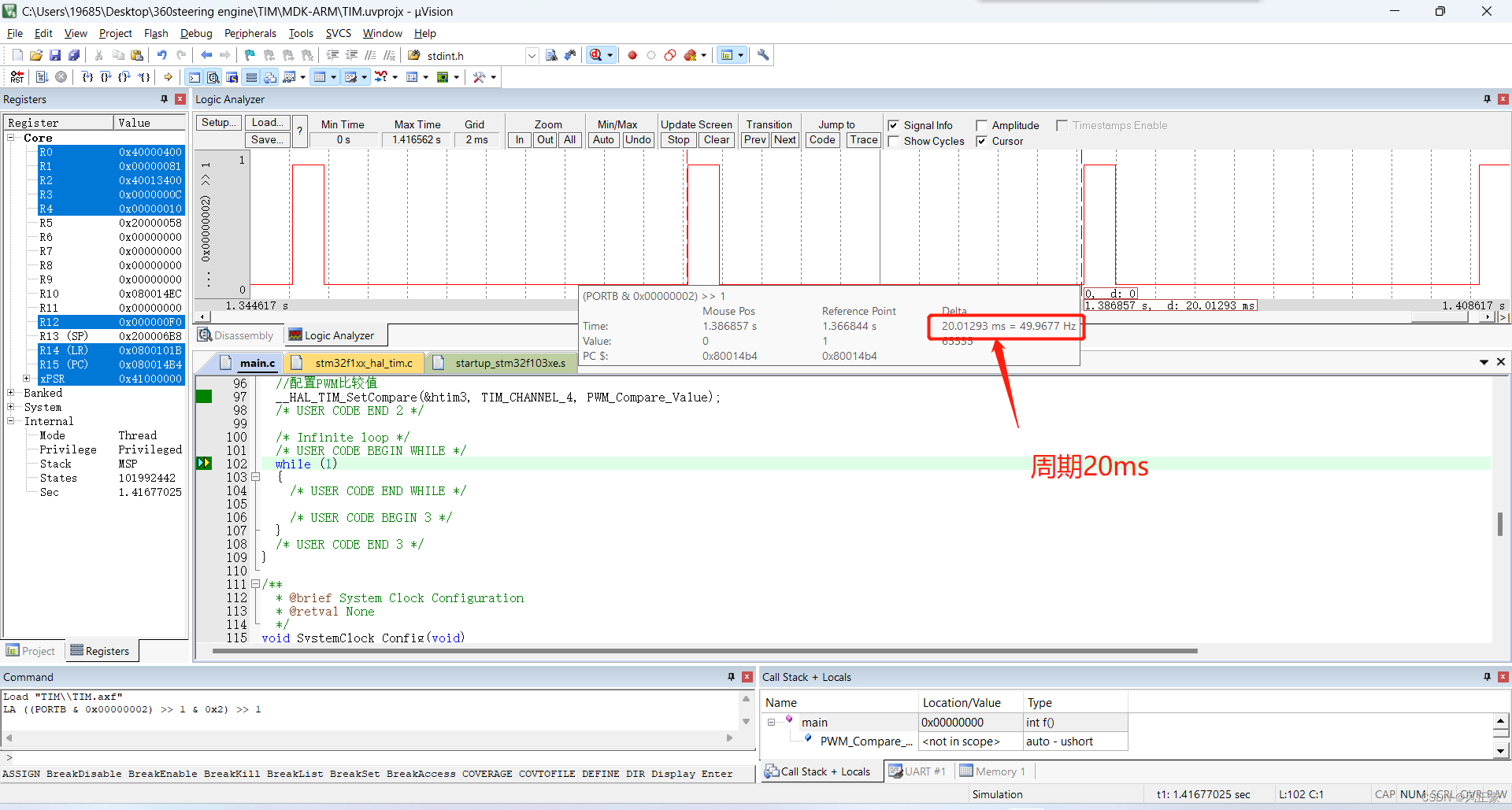
采用杜邦线将PA7和PB4相连,将PA6与PA15相连,就可以测量一下上一篇博客定时器输出可调PWM 中提到的PWM频率,如图所示

这里,我们甚至还可以进一步测量其占空比。通过一个定时器通道去测量整个周期的时间,再用一个定时器的通道去测量高电平持续的时间,其中,高电平持续的时间可以通过检测下变沿来得出。
接下来,我们进入到STM32Cubemx中去配置一下参数,因为我们的TIM16定时器只有一个通道,所以这里,我们只能用TIM2来做一下占空比测量
选择一个通道,设定为间接模式

将间接模式的通道的触发方式设定为下降沿触发

点击生成代码
我们再进入一下中断回调函数,增加几句代码,在main.c里面只需要声明几个变量即可,不需要额外开启第二通道的函数。
float ccrl_val1a,ccrl_val1b = 0;
unsigned int frq1 = 0,frq2 = 0;
float duty1,duty2 = 0;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) //中断回调函数
{
if(htim->Instance == TIM2) //PA15
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)//中断消息来源,选择直接输入通道
{
ccrl_val1a = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1); //直接
ccrl_val1b = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_2); //间接
__HAL_TIM_SetCounter(htim,0); //计数值清零
frq1 = (80000000/80)/ccrl_val1a; //计算频率
duty1 = (ccrl_val1b/ccrl_val1a) * 100; //计算占空比
HAL_TIM_IC_Start(htim,TIM_CHANNEL_1); //重新开启定时器通道一
HAL_TIM_IC_Start(htim,TIM_CHANNEL_2); //重新开启定时器通道二
}
}
if(htim->Instance == TIM16) //PB4
{
ccr1_val2 = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1);
__HAL_TIM_SetCounter(htim,0); //读完之后,将计时值清零
frq2 = (80000000/80)/ccr1_val2; //计算频率
HAL_TIM_IC_Start(htim,TIM_CHANNEL_1);
}
}最终效果如下: