目录
一、红黑树的概念
二、红黑树的性质
三、红黑树节点的定义
四、红黑树的插入
五、红黑树的验证
六、红黑树与AVL树的比较
七、完整代码
一、红黑树的概念
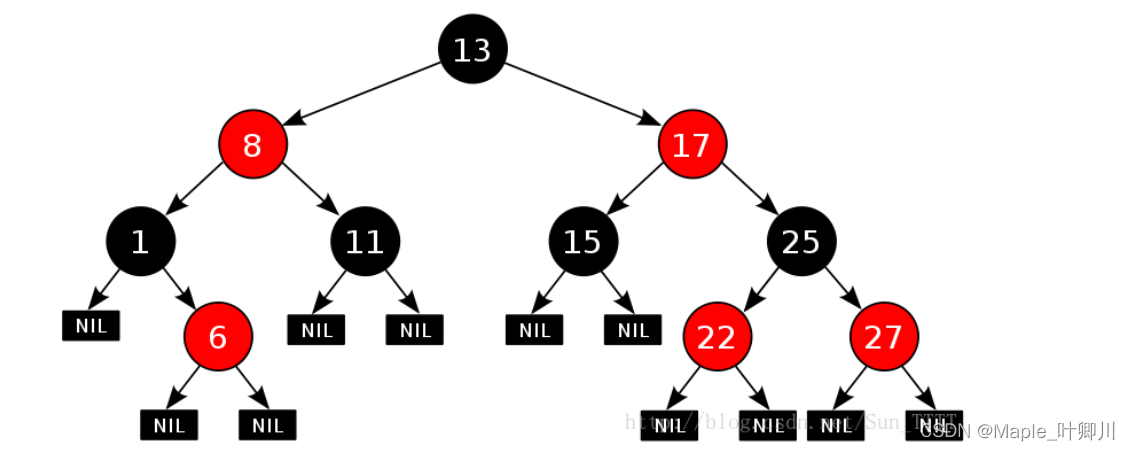
红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出俩倍,因而是接近平衡的
如下图就是一棵红黑树:
二、红黑树的性质
红黑树有以下性质:
- 每个结点不是红色就是黑色
- 根节点是黑色的
- 如果一个节点是红色的,则它的两个孩子结点是黑色的,即没有连续红色节点
- 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点
- 每个叶子结点都是黑色的(此处的叶子结点指的是空结点,如上图的NIL节点)
- 红黑树最优情况(左右平衡):全黑或每条路径都是一黑一红相间的满二叉树,搜索高度 logN
- 红黑树最差情况(左右极不平衡):每颗子树左子树全黑,右子树一黑一红,搜索高度 2*logN
红黑树不追求极致的平衡,AVL树则是追求极致的平衡,红黑树是近似平衡;红黑树这种近似平衡的结构大大减少了大量的旋转,红黑树的综合性能优于 AVL树
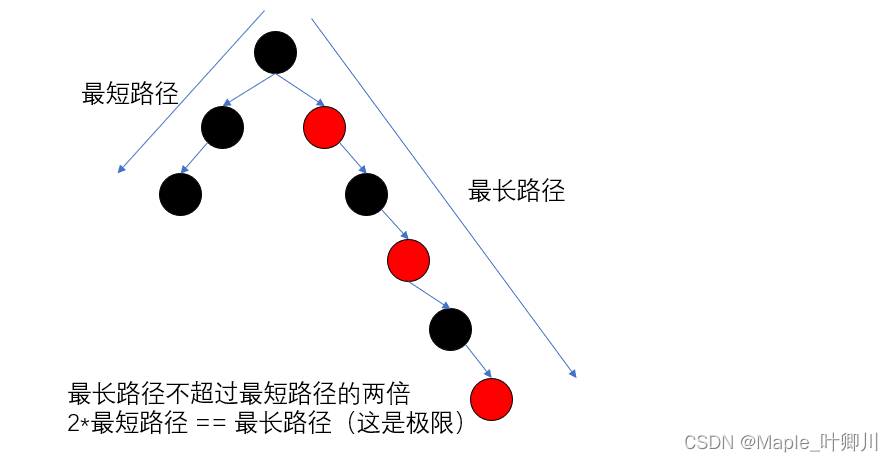
为什么红黑树满足上面的性质,红黑树就能保证:其最长路径中节点个数不会超过最短路径节点个数的两倍?
- 红黑树的最短路径:全黑,一条路径上的全是黑色节点
- 红黑树的最长路径:一黑一红相间的路径
比如:
三、红黑树节点的定义
红黑树也是使用键值对,即KV模型,也是为了方便后序操作,红黑树的结构也是三叉链,即增加了指向父节点的 parent指针,还增加了一个成员变量,用于标识节点的颜色(red or black)
enum Colour
{
RED,
BLACK,
};
//K:key, V:value
template<class K, class V>
struct RBTreeNode
{
//构造函数
RBTreeNode(const pair<K, V>& kv)
:_kv(kv)
,_left(nullptr)
,_right(nullptr)
,_parent(nullptr)
,_col(RED)
{}
//成员变量
pair<K, V> _kv;
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
RBTreeNode<K, V>* _parent;
Colour _col;
};
template<class K, class V>
class RBTree
{
typedef RBTreeNode<K, V> Node;
public:
private:
Node* _root = nullptr;//缺省值
};
注:这里使用了枚举来列举颜色
为什么构造红黑树结点时,默认将结点的颜色设置为红色?
- 插入结点如果是黑色的,一定破坏红黑树的性质4,无论如何都必须对红黑树进行调整。
- 插入结点如果是红色的,可能破坏红黑树的性质3,可能需要对红黑树进行调整 或者不需要调整
所以将节点颜色默认设置为红色
四、红黑树的插入
红黑树的插入分两步:
- 按照二叉搜索树的方式插入新节点
- 判断是否需要对红黑树进行调整
(1)插入节点
因为红黑树本身就是一棵二叉搜索树,因此寻找结点的插入位置是非常简单的,按照二叉搜索树的插入规则:
- 待插入结点的key值比当前结点小就插入到该结点的左子树
- 待插入结点的key值比当前结点大就插入到该结点的右子树
- 待插入结点的key值与当前结点的 key 值相等就插入失败
(2)判断是否需要对红黑树进行调整
判断:插入节点的父亲 parent 存在且为红色,则需要进行调整,否则不需要
然后分两种情况:
- (A)parent在 grandfather 的左边
- (B)parent在 grandfather 的右边
注:进行调整的关键是 uncle
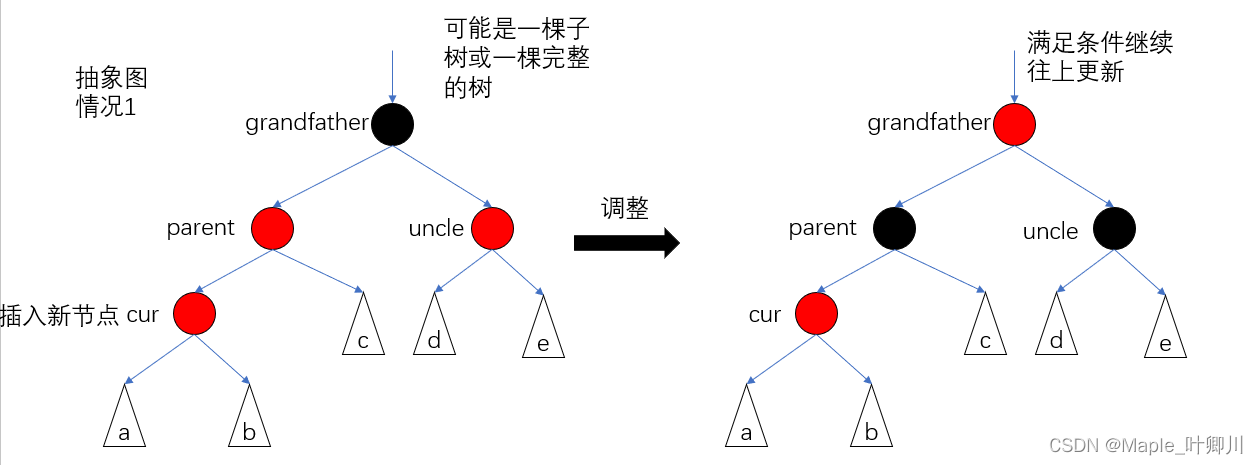
(A)parent在 grandfather 的左边有三种情况:
- 情况1:uncle存在且为红,uncle和parent的颜色需要修改为黑,granfather 修改为红,如果满足循环条件继续往上更新
- 情况2:uncle存在且为黑,需要对红黑树进行旋转
- 情况3:uncle不存在,需要对红黑树进行旋转
情况1,图如下:
注:情况2和情况3是一起处理的
情况2 + 情况3:
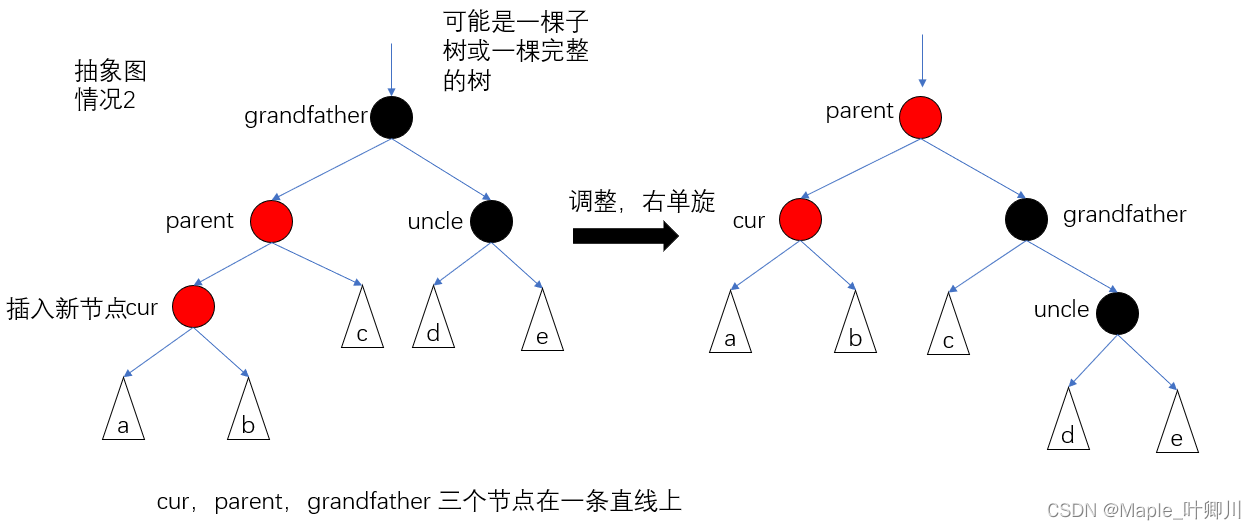
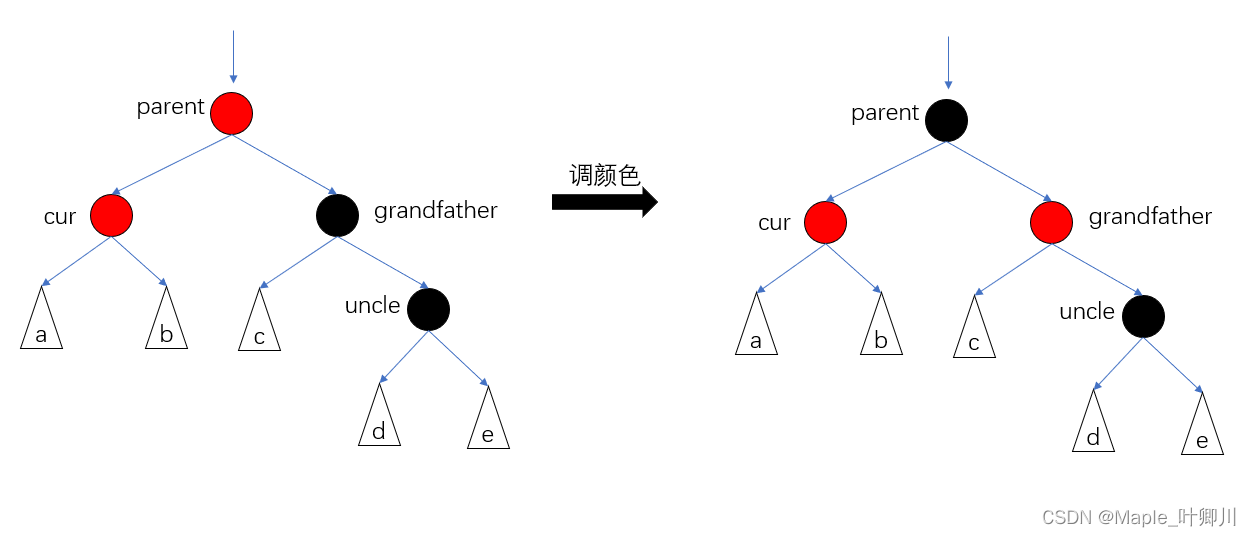
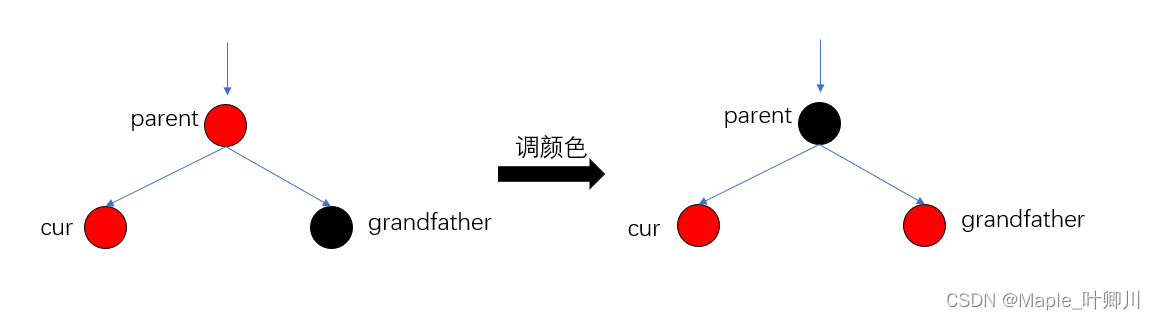
- cur,parent,grandfather 三个节点在一条直线上,单旋处理即可,对 grandfater 进行右单旋,然后 parent 的颜色改为黑,grandfater 的颜色改为红
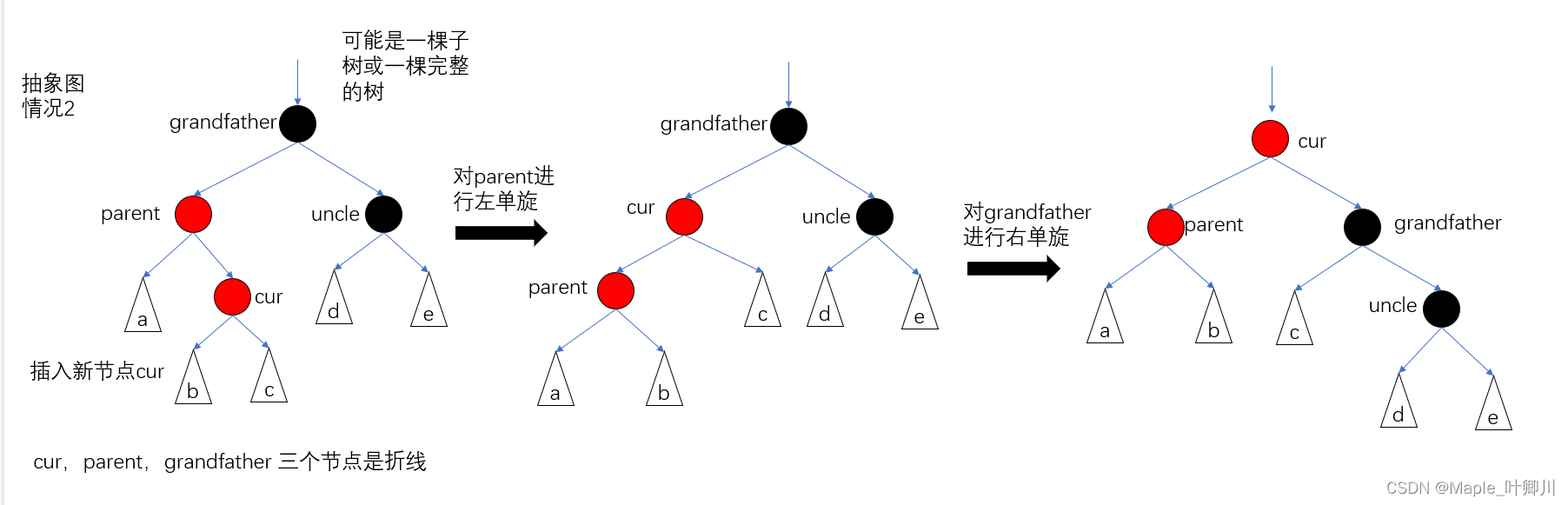
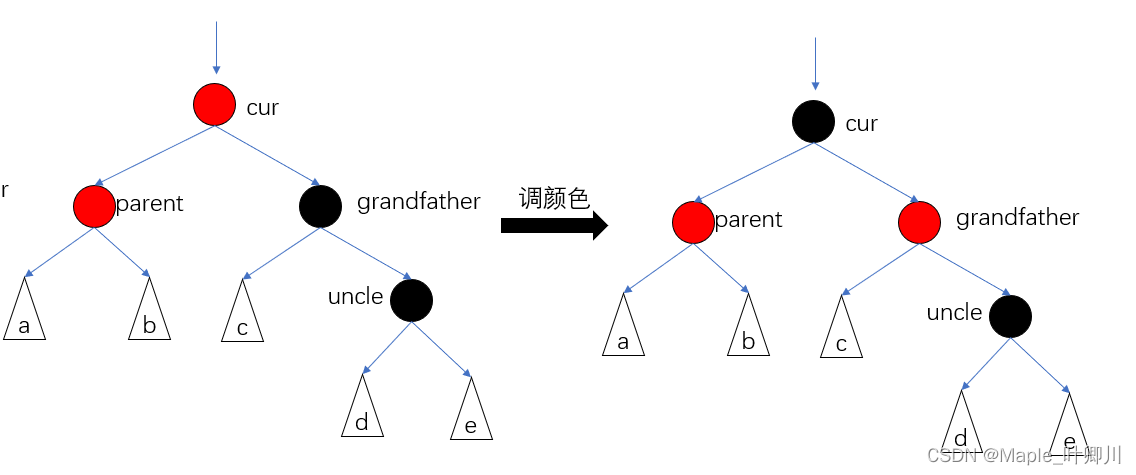
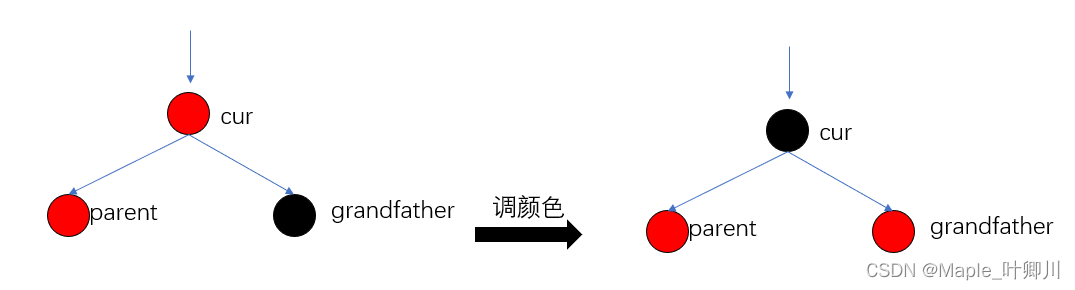
- cur,parent,grandfather 三个节点是折线,需要双旋处理,对 parent 进行左单旋,然后对 grandfater 进行右单旋,然后 cur 的颜色改为黑,grandfater 的颜色改为红
情况2,图如下:
cur,parent,grandfather 三个节点在一条直线上
调颜色
 cur,parent,grandfather 三个节点是折线
cur,parent,grandfather 三个节点是折线
调颜色
情况3,图如下:
cur,parent,grandfather 三个节点在一条直线上
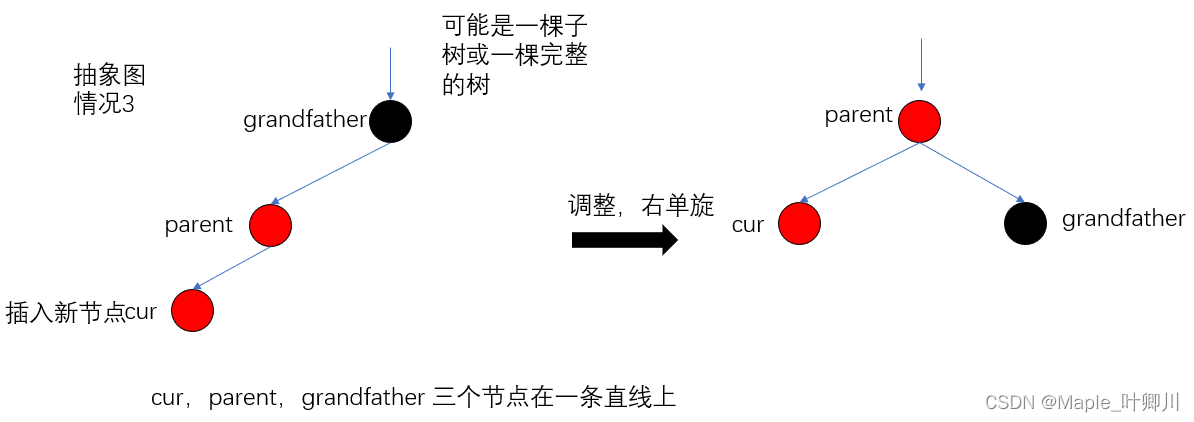
调颜色
cur,parent,grandfather 三个节点是折线
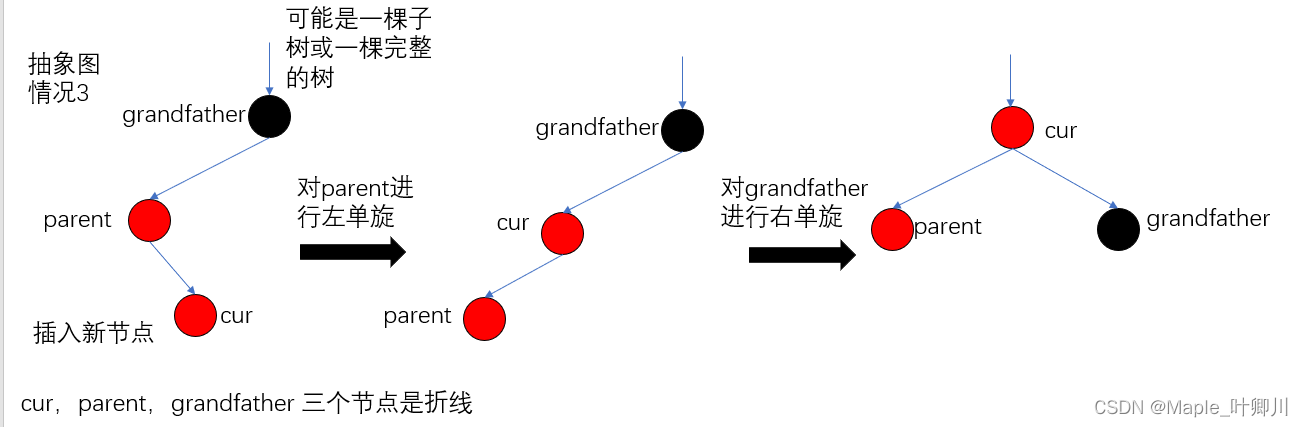
调颜色
(B)parent在 grandfater 的右边也有三种情况:(与左边情况完全一致,只是旋转不同)
- 情况1:uncle存在且为红,uncle和parent的颜色需要修改为黑,grandfater修改为红,如果满足循环条件继续往上更新
- 情况2:uncle存在且为黑,需要对红黑树进行旋转,对 grandfather 进行右单旋
- 情况3:uncle不存在,需要对红黑树进行双旋转,对 parent 进行左单旋,然后对 grandfather 进行右单旋
注:情况2和情况3是一起处理的
情况2 + 情况3:
- cur,parent,grandfather 三个节点在一条直线上,单旋处理即可,对 grandfather 进行左单旋,然后 parent 的颜色改为黑,grandfater 的颜色改为红
- cur,parent,grandfather 三个节点是折线,需要双旋处理,对 parent 进行右单旋,然后对 grandfather 进行左单旋,然后 cur 的颜色改为黑,grandfather 的颜色改为红
图就不画了,左边的图反过来就是右边的图,旋转在 AVL树有解释,这里就不再解释
经调整后,保持了红黑树的特性
插入代码如下:
//插入
bool Insert(const pair<K, V>& kv)
{
//节点为空,新建根节点
if (_root == nullptr)
{
_root = new Node(kv);
_root->_col = BLACK;//根节点默认为黑色
return true;
}
//节点为不空
Node* parent = nullptr;//用于记录上一个节点
Node* cur = _root;
//寻找合适的位置进行插入
while (cur)
{
if (cur->_kv.first > kv.first)
{
parent = cur;
cur = cur->_left;
}
else if (cur->_kv.first < kv.first)
{
parent = cur;
cur = cur->_right;
}
else//cur->kv.first == kv.first要插入值已经存在,插入失败
{
return false;
}
}
cur = new Node(kv);
cur->_col = RED;//新节点默认为红
//插入
if (parent->_kv.first < kv.first)//插入到parent左边
{
parent->_right = cur;
cur->_parent = parent;
}
else//插入到parent右边
{
parent->_left = cur;
cur->_parent = parent;
}
//进行调平衡 && 保持红黑树的特性,即插入节点的父亲是红色,需要对红黑树进行调整
while (parent && parent->_col == RED)//parent存在且为红 进行调整
{
Node* grandfather = parent->_parent;
//(1)parent在grandfater的左边
//(2)parent在grandfater的右边
if (parent == grandfather->_left)//parent在grandfater的左边
{
//情况1:uncle存在且为红,uncle和parent的颜色需要修改为黑,grandfater修改为红,如果满足循环条件继续往上更新
//情况2:uncle存在且为黑,需要对红黑树进行旋转
//情况3:uncle不存在,需要对红黑树进行旋转
//注:情况2和情况3是一起处理的
Node* uncle = grandfather->_right;
if (uncle && uncle->_col == RED)//情况1
{
//修改颜色
uncle->_col = parent->_col = BLACK;
grandfather->_col = RED;
//迭代往上更新
cur = grandfather;
parent = cur->_parent;
}
else//情况2 + 情况3
{
if (cur == parent->_left)//cur,parent,grandfater三个节点在一条直线上,单旋处理即可
{
RotateR(grandfather);//右单旋
parent->_col = BLACK;
grandfather->_col = RED;
}
else//cur,parent,grandfater三个节点是折线,需要双旋处理
{
RotateL(parent);//左单旋
RotateR(grandfather);//右单旋
cur->_col = BLACK;
grandfather->_col = RED;
}
break;//旋转后,该子树的根变成了黑色,符合红黑树的特性,无需继续往上处理
}
}
else//parent在grandfater的右边
{
//在右边 也是上面左边的三种情况
Node* uncle = grandfather->_left;
if (uncle && uncle->_col == RED)//情况1
{
//修改颜色
uncle->_col = parent->_col = BLACK;
grandfather->_col = RED;
//迭代往上更新
cur = grandfather;
parent = cur->_parent;
}
else//情况2 + 情况3
{
if (cur == parent->_right)//cur,parent,grandfater三个节点在一条直线上,单旋处理即可
{
RotateL(grandfather);
parent->_col = BLACK;
grandfather->_col = RED;
}
else//cur,parent,grandfater三个节点是折线,需要双旋处理
{
RotateR(parent);
RotateL(grandfather);
cur->_col = BLACK;
grandfather->_col = RED;
}
break;//旋转后,该子树的根变成了黑色,符合红黑树的特性,无需继续往上处理
}
}
}
_root->_col = BLACK;//根的颜色需要变为黑(原因是可能情况1会把根节点变红)
return true;
}注:红黑树其他接口就不实现了,在面试考的花也是考查红黑树的插入,即红黑树如何调平衡
五、红黑树的验证
红黑树的检测分为两步:
- 检测其是否满足二叉搜索树(中序遍历是否为有序序列)
- 检测其是否满足红黑树的性质
(1)中序检查
//中序遍历
void InOrder()
{
_InOrder(_root);
}
void _InOrder(Node* root)
{
if (root == nullptr)
return;
_InOrder(root->_left);
cout << root->_kv.first << ":" << root->_kv.second << endl;
_InOrder(root->_right);
}(2)检查红黑树特性
//检查红黑树特性
bool IsBalance()
{
if (_root == nullptr)
{
return true;
}
if (_root->_col != BLACK)
{
cout << "违反规则:根节点不为黑色" << endl;
return false;
}
Node* left = _root;
int ref = 0;//用于一条路径上记录黑色节点的数量
while (left)//求一条路径的黑色节点
{
if (left->_col == BLACK)
{
++ref;
}
left = left->_left;
}
return Check(_root, 0, ref);
}
//检查每条路径的黑色节点是否相等 && 是否出现连续红色节点
bool Check(Node* root, int blackNum, int ref)
{
if (root == nullptr)
{
if (blackNum != ref)
{
cout << "违反规则:本条路径的黑色节点的数量跟最左路径不相等" << endl;
return false;
}
return true;
}
if (root->_col == RED && root->_parent->_col == RED)
{
cout << "违反规则:出现连续红色节点" << endl;
return false;
}
if (root->_col == BLACK)
{
++blackNum;
}
return Check(root->_left, blackNum, ref)
&& Check(root->_right, blackNum, ref);
}六、红黑树与AVL树的比较
红黑树和 AVL树都是高效的平衡二叉树,增删改查的时间复杂度都是O(logN),红黑树不追求绝对平衡,其只需保证最长路径不超过最短路径的2倍,相对而言,降低了插入和旋转的次数,所以在经常进行增删的结构中性能比 AVL树更优,而且红黑树实现比较简单,所以实际运用中红黑树更多
红黑树的应用:
- C++ STL库 -- map/set、mutil_map/mutil_set
- Java 库
- linux内核
- 其他一些库
七、完整代码
RBTree.h
#pragma once
enum Colour
{
RED,
BLACK,
};
//K:key, V:value
template<class K, class V>
struct RBTreeNode
{
//构造函数
RBTreeNode(const pair<K, V>& kv)
:_kv(kv)
,_left(nullptr)
,_right(nullptr)
,_parent(nullptr)
,_col(RED)
{}
//成员变量
pair<K, V> _kv;
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
RBTreeNode<K, V>* _parent;
Colour _col;
};
template<class K, class V>
class RBTree
{
typedef RBTreeNode<K, V> Node;
public:
//插入
bool Insert(const pair<K, V>& kv)
{
//节点为空,新建根节点
if (_root == nullptr)
{
_root = new Node(kv);
_root->_col = BLACK;//根节点默认为黑色
return true;
}
//节点为不空
Node* parent = nullptr;//用于记录上一个节点
Node* cur = _root;
//寻找合适的位置进行插入
while (cur)
{
if (cur->_kv.first > kv.first)
{
parent = cur;
cur = cur->_left;
}
else if (cur->_kv.first < kv.first)
{
parent = cur;
cur = cur->_right;
}
else//cur->kv.first == kv.first要插入值已经存在,插入失败
{
return false;
}
}
cur = new Node(kv);
cur->_col = RED;//新节点默认为红
//插入
if (parent->_kv.first < kv.first)//插入到parent左边
{
parent->_right = cur;
cur->_parent = parent;
}
else//插入到parent右边
{
parent->_left = cur;
cur->_parent = parent;
}
//进行调平衡 && 保持红黑树的特性,即插入节点的父亲是红色,需要对红黑树进行调整
while (parent && parent->_col == RED)//parent存在且为红 进行调整
{
Node* grandfather = parent->_parent;
//(1)parent在grandfater的左边
//(2)parent在grandfater的右边
if (parent == grandfather->_left)//parent在grandfater的左边
{
//情况1:uncle存在且为红,uncle和parent的颜色需要修改为黑,grandfater修改为红,如果满足循环条件继续往上更新
//情况2:uncle存在且为黑,需要对红黑树进行旋转
//情况3:uncle不存在,需要对红黑树进行旋转
//注:情况2和情况3是一起处理的
Node* uncle = grandfather->_right;
if (uncle && uncle->_col == RED)//情况1
{
//修改颜色
uncle->_col = parent->_col = BLACK;
grandfather->_col = RED;
//迭代往上更新
cur = grandfather;
parent = cur->_parent;
}
else//情况2 + 情况3
{
if (cur == parent->_left)//cur,parent,grandfater三个节点在一条直线上,单旋处理即可
{
RotateR(grandfather);//右单旋
parent->_col = BLACK;
grandfather->_col = RED;
}
else//cur,parent,grandfater三个节点是折线,需要双旋处理
{
RotateL(parent);//左单旋
RotateR(grandfather);//右单旋
cur->_col = BLACK;
grandfather->_col = RED;
}
break;//旋转后,该子树的根变成了黑色,符合红黑树的特性,无需继续往上处理
}
}
else//parent在grandfater的右边
{
//在右边 也是上面左边的三种情况
Node* uncle = grandfather->_left;
if (uncle && uncle->_col == RED)//情况1
{
//修改颜色
uncle->_col = parent->_col = BLACK;
grandfather->_col = RED;
//迭代往上更新
cur = grandfather;
parent = cur->_parent;
}
else//情况2 + 情况3
{
if (cur == parent->_right)//cur,parent,grandfater三个节点在一条直线上,单旋处理即可
{
RotateL(grandfather);
parent->_col = BLACK;
grandfather->_col = RED;
}
else//cur,parent,grandfater三个节点是折线,需要双旋处理
{
RotateR(parent);
RotateL(grandfather);
cur->_col = BLACK;
grandfather->_col = RED;
}
break;//旋转后,该子树的根变成了黑色,符合红黑树的特性,无需继续往上处理
}
}
}
_root->_col = BLACK;//根的颜色需要变为黑(原因是可能情况1会把根节点变红)
return true;
}
//中序遍历
void InOrder()
{
_InOrder(_root);
}
//检查红黑树特性
bool IsBalance()
{
if (_root == nullptr)
{
return true;
}
if (_root->_col != BLACK)
{
cout << "违反规则:根节点不为黑色" << endl;
return false;
}
Node* left = _root;
int ref = 0;//用于一条路径上记录黑色节点的数量
while (left)//求一条路径的黑色节点
{
if (left->_col == BLACK)
{
++ref;
}
left = left->_left;
}
return Check(_root, 0, ref);
}
private:
//检查每条路径的黑色节点是否相等 && 是否出现连续红色节点
bool Check(Node* root, int blackNum, int ref)
{
if (root == nullptr)
{
if (blackNum != ref)
{
cout << "违反规则:本条路径的黑色节点的数量跟最左路径不相等" << endl;
return false;
}
return true;
}
if (root->_col == RED && root->_parent->_col == RED)
{
cout << "违反规则:出现连续红色节点" << endl;
return false;
}
if (root->_col == BLACK)
{
++blackNum;
}
return Check(root->_left, blackNum, ref)
&& Check(root->_right, blackNum, ref);
}
void _InOrder(Node* root)
{
if (root == nullptr)
return;
_InOrder(root->_left);
cout << root->_kv.first << ":" << root->_kv.second << endl;
_InOrder(root->_right);
}
//左单旋
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
//进行链接
parent->_right = subRL;
if (subRL)
subRL->_parent = parent;
Node* ppNode = parent->_parent;//记录parent节点的前一个节点
subR->_left = parent;
parent->_parent = subR;
if (ppNode == nullptr)//即subR已经是根节点
{
_root = subR;
_root->_parent = nullptr;
}
else//subR不是根节点
{
//与上一个节点进行链接
if (ppNode->_left == parent)//parent原本在 ppNode 的左边
{
ppNode->_left = subR;
}
else//parent原本在 ppNode 的右边
{
ppNode->_right = subR;
}
subR->_parent = ppNode;
}
}
//右单旋
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
//进行链接
parent->_left = subLR;
if (subLR)
subLR->_parent = parent;
Node* ppNode = parent->_parent;//记录parent节点的前一个节点
subL->_right = parent;
parent->_parent = subL;
if (ppNode == nullptr)//即subL已经是根节点
{
_root = subL;
subL->_parent = nullptr;
}
else//subR不是根节点
{
//与上一个节点进行链接
if (ppNode->_left == parent)//parent原本在 ppNode 的左边
{
ppNode->_left = subL;
}
else//parent原本在 ppNode 的右边
{
ppNode->_right = subL;
}
subL->_parent = ppNode;
}
}
private:
Node* _root = nullptr;//缺省值
};
Test.cpp
#include <iostream>
using namespace std;
#include "RBTree.h"
void TestRBTree1()
{
//int arr[] = { 8, 3, 1, 10, 6, 4, 7, 14, 13 };
//int arr[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };
int arr[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };
RBTree<int, int> t;
for (auto e : arr)
{
t.Insert(make_pair(e, e));
}
t.InOrder();
}
void TestRBTree2()
{
srand(time(0));//随机数种子
const size_t N = 100000;
RBTree<int, int> t;
for (size_t i = 0; i < N; ++i)
{
size_t x = rand();
t.Insert(make_pair(x, x));
//cout << t.IsBalance() << endl;
}
cout << t.IsBalance() << endl;
}
int main()
{
TestRBTree2();
return 0;
}----------------我是分割线---------------
文章到这里就结束了,下一篇即将更新



![[NOIP2009 提高组] 最优贸易(C++,tarjan,topo,DP)](https://img-blog.csdnimg.cn/ac8b4e77a6f348b5a4ddf63009153a80.png#pic_center)