对射式红外传感器
1.1 接线图

VCC GND分别接电源的正负极
DO数字输出端,随意选择一个GPIO口
1.2 硬件原理
当挡光片或者编码盘在对射式红外传感器中间经过时,DO就会输出电平变化信号,电平跳变信号触发STM32 PB14号口中断,在中断函数中执行变量++程序,并在主循环里调用OLED中显示变量。
1.3 设计思路
本次设计采用模块化编程,分为CountSensor.c、CountSensor.h、main.c三部分。
先进行初始化
EXTI(中断)配置
1. 第⼀步,配置RCC,把所涉及到的外设时钟都打开 (GPIOB,AFIO(NVIC,EXTI无需打开)) 2. 第⼆步,配置GPIO,选择端口为输⼊模式 3. 第三步,配置AFIO,选择使⽤的⼀路GPIO,连接到EXTI 4. 第四步,配置EXTI,选择边沿触发⽅式,选择触发响应⽅式 5. 第五步,配置NVIC,给中断选择⼀个合适的优先级
最后通过NVIC,外部中断信号进入CPU,CPU收到中断信号,跳转到中断函数里执行中断程序。
EXTI和NVIC时钟默认是打开的,NVIC是内核的外设,内核的外设都不需要开启时钟,RCC 管的都是内核外的外设
1.4 知识储备 AFIO
复位AFIO外设
void GPIO_AFIODeInit(void);锁定GPIO配置函数
锁定引脚的配置,防⽌意外更改
void GPIO_PinLockConfig(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin);配置AFIO的事件输出功能函数
void GPIO_EventOutputConfig(uint8_t GPIO_PortSource,uint8_tGPIO_PinSource);
void GPIO_EventOutputCmd(FunctionalState NewState);引脚重映射函数
void GPIO_PinRemapConfig(uint32_t GPIO_Remap,FunctionalStateNewState);配置AFIO的数据选择器
通过配置AFIO数据选择器,选择中断引脚。
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource,uint8_tGPIO_PinSource);恢复上电默认的状态函数
void EXTI_DeInit(void);1.5 知识储备EXTI
清除EXTI配置,恢复上电默认的状态函数
void EXTI_DeInit(void);根据结构体配置EXTI外设函数
void EXTI_Init(EXTI_InitTypedef* EXTI_InitStruct);给传⼊的结构体参数赋⼀个默认值函数
void EXTI_StructInit(EXTI_InitTypedef* EXTI_InitStruct);软件触发外部中断函数
调用函数,参数给⼀个指定的中断线,就能软件触发⼀次这个外部中断
void EXTI_GenerateSWInterrupt(uint32_t EXTI_Line);下面四个是库函数的模板函数
在主程序里查看和清除标志位用下面两个函数
获取指定的标志位是否被置1
FlagStatus EXTI_GetFlagStatus(uint32_t EXTI_Line);对置1的标志位进⾏清除函数
void EXTI_ClearFlag(uint32_t EXTI_Line);在中断函数里查看和清除标志位用下面两个
在中断函数中获取标志位函数
ITStatus EXTI_GetITStatus(uint32_t EXTI_Line);清除中断挂起标志位函数
void EXTI_ClearITPendingBit(uint32_t EXTI_Line);1.6 知识储备NVIC
中断分组函数
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup);根据结构体⾥⾯的参数初始化NVIC函数
void NVIC_Init(NVIC_InitTypedef* NVIC_InitStruct);设置中断向量表函数
NVIC_SetVectorTable函数的功能是设置向量表的位置和偏移。其中输⼊参数中,对于32位 的OFFSET向量表基地址的偏移量对于FLASH,参数值必须⾼于0x08000100,对于RAM必 须⾼于0X100
void NVIC_SetVectorTable(uint8_t NVIC_VectTab,uint32_t Offset);系统低功耗配置函数
void NVIC_SystemLPConfig(uint8_t LowPowerMode,FunctionalStateNewState)注意:中断函数要简短快速,不要在中断中执⾏Delay
1.7 程序设计
CountSensor.c
#include "stm32f10x.h" // Device header
uint16_t CountSensor_Count;
void CountSensor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//开启GPIOB的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//开启AFIO的时钟
//配置GPIO
GPIO_InitTypeDef GPIO_InitStructure;//定义初始化结构体
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;//开启引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//设置响应速度
GPIO_Init(GPIOB, &GPIO_InitStructure);//配置参数
//配置AFIO
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);//配置AFIO外部中断引脚选择
//配置EXTI
EXTI_InitTypeDef EXTI_InitStructure;//定义外部中断结构体
EXTI_InitStructure.EXTI_Line = EXTI_Line14;//指定配置中断线
EXTI_InitStructure.EXTI_LineCmd = ENABLE;//开启中断线路
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发
EXTI_Init(&EXTI_InitStructure);//写入参数
//指定中断分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;//定义NVIC结构体
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;//设置中断通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//通道使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//响应优先级
NVIC_Init(&NVIC_InitStructure);//写入参数
}
//返回中断统计次数
uint16_t CountSensor_Get(void)
{
return CountSensor_Count;
}
//中断函数
void EXTI15_10_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line14) == SET)//中断标志位判断是否为1
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0)
{
CountSensor_Count ++;//统计中断返回次数
}
EXTI_ClearITPendingBit(EXTI_Line14);//清除中断标志位
}
}
CountSensor.h
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_H
void CountSensor_Init(void);
uint16_t CountSensor_Get(void);
#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"
int main(void)
{
OLED_Init();
CountSensor_Init();
OLED_ShowString(1, 1, "Count:");/1行1列显示Count:
while (1)
{
OLED_ShowNum(1, 7, CountSensor_Get(), 5);//一行七列显示返回次数,长度为5
}
}
2. 旋转编码器计次
2.1 接线图
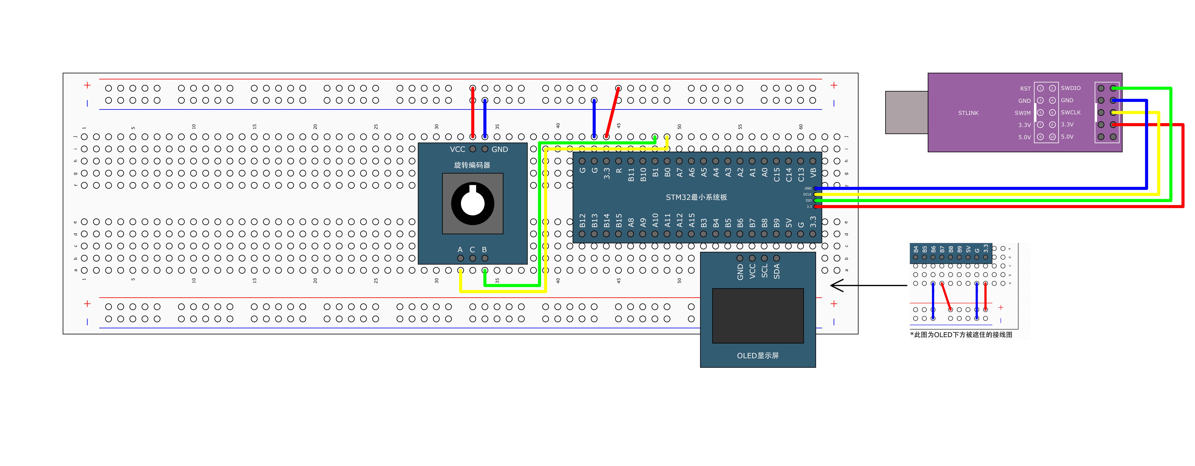
VCC GND接正负极,A,B相输出引脚,接到STM32的PB0和PB1引脚。
2.2 设计思路
本设计采用模块化编程,分为Encoder.c、Encoder.h、mian.c三部分。
2.3 程序设计
Encoder.c
#include "stm32f10x.h" // Device header
int16_t Encoder_Count;
void CountSensor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//开启GPIOB的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//开启AFIO的时钟
//配置GPIO
GPIO_InitTypeDef GPIO_InitStructure;//定义初始化结构体
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 |GPIO_Pin_1;//开启引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//设置响应速度
GPIO_Init(GPIOB, &GPIO_InitStructure);//配置参数
//配置AFIO
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);//配置AFIO外部中断引脚选择
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1);
//配置EXTI
EXTI_InitTypeDef EXTI_InitStructure;//定义外部中断结构体
EXTI_InitStructure.EXTI_Line = EXTI_Line14;//指定配置中断线
EXTI_InitStructure.EXTI_LineCmd = ENABLE;//开启中断线路
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发
EXTI_Init(&EXTI_InitStructure);//写入参数
//指定中断分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;//定义NVIC结构体
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;//设置中断通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//通道使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//响应优先级
NVIC_Init(&NVIC_InitStructure);//写入参数
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;//设置中断通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//通道使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;//响应优先级
NVIC_Init(&NVIC_InitStructure);//写入参数
}
int16_t Encoder_Get(void)
{
int16_t Temp;//定义临时变量,方便Count清零
Temp = Encoder_Count;
Encoder_Count = 0;
return Temp;
}
void EXTI0_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line14) == SET)//中断标志位判断是否为1
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0)//读取输入高低电平
{
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)
{
Encoder_Count --;
}
}
EXTI_ClearITPendingBit(EXTI_Line14);//清除中断标志位
}
}
void EXTI1_IRQHandler(void)//线路1中断函数
{
if (EXTI_GetITStatus(EXTI_Line14) == SET)//中断标志位判断是否为1
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)//读取输⼊⾼低电平
{
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0)
{
Encoder_Count ++;
}
}
EXTI_ClearITPendingBit(EXTI_Line14);//清除中断标志位
}
}
Encoder.h
#ifndef __ENCODER_H
#define __ENCODER_H
void Encoder_Init(void);
int16_t Encoder_Get(void);
#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"
int16_t Num;
int main(void)
{
OLED_Init();
Encoder_Init();
OLED_ShowString(1, 1, "Num:");
while (1)
{
Num += Encoder_Get();
OLED_ShowSignedNum(1, 5, Num, 5);
}
}