OpenGL
- Assimp
- 模型加载库
- 构建Assimp
- 网格
- 网格渲染
Assimp
我们不太能够对像是房子、汽车或者人形角色这样的复杂形状手工定义所有的顶点、法线和纹理坐标。我们要的是将这些模型(Model)导入(Import)到程序当中。模型通常都由3D艺术家在Blender、3DS Max或者Maya这样的工具中精心制作。上述的建模工具,可以让艺术家创建复杂的形状,使用一种叫做UV映射的手段来应用贴图。将会在导出到模型文件的时候自动生成所有的顶点坐标、顶点法线以及纹理坐标。
我们需要解析这些导出的模型文件以及提取有用的信息,把它们存储为OpenGL能够理解的格式。
模型的文件格式有很多种,每一种都会以它们自己的方式来导出模型数据。像是Wavefront的.obj这样的模型格式,只包含了模型数据以及材质信息,比如模型颜色和漫反射/镜面光贴图。而以XML为基础的Collada文件格式则非常的丰富,包含模型、光照、多种材质、动画数据、摄像机、完整的场景信息等等。
Wavefront的.obj格式通常被认为是一个易于解析的模型格式。建议至少去Wavefront的wiki页面上看看文件格式的信息是如何封装的。这应该能让你认识到模型文件的基本结构。不同种类的文件格式有很多,它们之间通常并没有一个通用的结构。想从这些文件格式中导入模型的话,我们必须要去自己对每一种需要导入的文件格式写一个导入器。很幸运的是,正好有一个库专门处理这个问题。
模型加载库
模型导入库Assimp,它是Open Asset Import Library(开放的资产导入库)的缩写。
能够导入很多种不同的模型文件格式,它会将所有的模型数据加载到Assimp的通用数据结构种。当Assimp加载完模型之后,我们就能够从Assimp的数据结构中提取我们所需的所有数据了。由于Assimp的数据结构保持不变,不论导入的是什么种类的文件格式,它都能够将我们从这些不同的文件格式中抽象出来,用同一种方式访问我们需要的数据。
当使用Assimp导入一个模型的时候,通常会将整个模型加载到一个场景对象。包含:导入的模型、场景中的所有数据。Assimp会将场景载入为一系列的节点,每个节点包含了场景对象种所存储数据的索引,每个节点都可以有任意数量的子节点。简化数据模型如下:
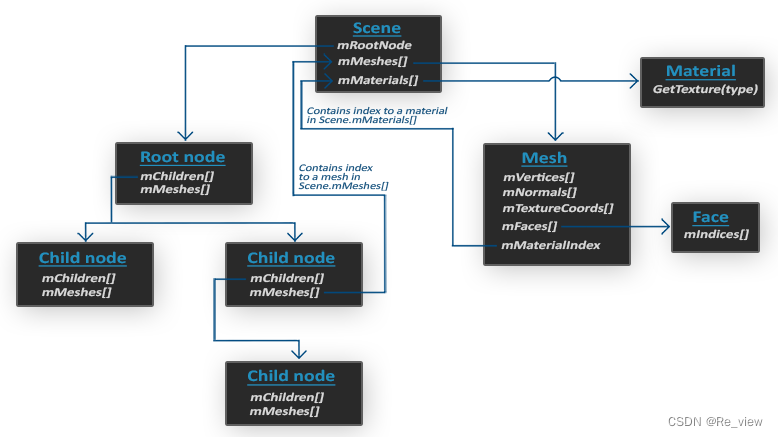
- 和材质和网格(Mesh)一样,所有的场景/模型数据都包含在Scene对象中。Scene对象也包含了场景根节点的引用。
- 场景的Root node(根节点)可能包含子节点(和其它的节点一样),它会有一系列指向场景对象中mMeshes数组中储存的网格数据的索引。Scene下的mMeshes数组储存了真正的Mesh对象,节点中的mMeshes数组保存的只是场景中网格数组的索引。
- 一个Mesh对象本身包含了渲染所需要的所有相关数据,像是顶点位置、法向量、纹理坐标、面(Face)和物体的材质。
- 一个网格包含了多个面。Face代表的是物体的渲染图元(Primitive)(三角形、方形、点)。一个面包含了组成图元的顶点的索引。由于顶点和索引是分开的,使用一个索引缓冲来渲染是非常简单的(之前章节中画三角形)。
- 最后,一个网格也包含了一个Material对象,它包含了一些函数能让我们获取物体的材质属性,比如说颜色和纹理贴图(比如漫反射和镜面光贴图)。
所以,我们需要做的第一件事是将一个物体加载到Scene对象中,遍历节点,获取对应的Mesh对象(我们需要递归搜索每个节点的子节点),并处理每个Mesh对象来获取顶点数据、索引以及它的材质属性。最终的结果是一系列的网格数据,我们会将它们包含在一个Model对象中。
补充:网格
当使用建模工具对物体建模的时候,艺术家通常不会用单个形状创建出整个模型。通常每个模型都由几个子模型/形状组合而成。组合模型的每个单独的形状就叫做一个网格(Mesh)。比如说有一个人形的角色:艺术家通常会将头部、四肢、衣服、武器建模为分开的组件,并将这些网格组合而成的结果表现为最终的模型。一个网格是我们在OpenGL中绘制物体所需的最小单位(顶点数据、索引和材质属性)。一个模型(通常)会包括多个网格。
构建Assimp
需要创建自己的Model和Mesh类来加载并使用刚才的结构存储导入后的模型。
要绘制一个模型,不需要将整个模型渲染成一个整体,只需要渲染组成模型的每个独立的网格就可以了。先将Assimp包包含到工程当中。
下载Assimp可以参考这两个文章:
https://blog.csdn.net/derbi123123/article/details/105783048/
https://blog.csdn.net/xiaopenga520/article/details/126522776
网格
网格代表的是单个可绘制实体,先定义一个网格类。
一个网格最少需要一系列顶点,每个顶点包含一个位置向量,一个法向量,一个纹理坐标向量。还要包含用于索引绘制的索引,纹理形式的材质数据——漫反射/镜面光贴图:
把需要的向量存储到下面的结构体中,可以用来索引每个顶点属性。
struct Vertex {
glm::vec3 Position;
glm::vec3 Normal;
glm::vec2 TexCoords;
};
再将纹理数据整理到一个结构体中:
struct Texture {
unsigned int id;
string type;
};
存储了纹理ID和纹理类型,比如:漫反射贴图或者是镜面光贴图
再定义网格类:
class Mesh {
public:
/* 网格数据 */
vector<Vertex> vertices;
vector<unsigned int> indices;
vector<Texture> textures;
/* 函数 */
Mesh(vector<Vertex> vertices, vector<unsigned int> indices, vector<Texture> textures);
void Draw(Shader shader);
private:
/* 渲染数据 */
unsigned int VAO, VBO, EBO;
/* 函数 */
void setupMesh();
};
上述类结构,把所有数据在构造器中进行赋值,在setupMesh函数中初始化缓冲,最后使用Draw来绘制网格。构造器函数如下:
//只需要使用构造器的参数设置类的公有变量
Mesh(vector<Vertex> vertices, vector<unsigned int> indices, vector<Texture> textures)
{
this->vertices = vertices;
this->indices = indices;
this->textures = textures;
setupMesh();
}
在把网格数据用于渲染之前,还需要配置正确的缓冲,通过顶点属性指针 定义顶点着色器。setupMesh函数如下:
void setupMesh()
{
glGenVertexArrays(1, &VAO);
glGenBuffers(1, &VBO);
glGenBuffers(1, &EBO);
glBindVertexArray(VAO);
glBindBuffer(GL_ARRAY_BUFFER, VBO);
glBufferData(GL_ARRAY_BUFFER, vertices.size() * sizeof(Vertex), &vertices[0], GL_STATIC_DRAW);
glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, EBO);
glBufferData(GL_ELEMENT_ARRAY_BUFFER, indices.size() * sizeof(unsigned int),
&indices[0], GL_STATIC_DRAW);
// 顶点位置
glEnableVertexAttribArray(0);
glVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)0);
// 顶点法线
glEnableVertexAttribArray(1);
glVertexAttribPointer(1, 3, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, Normal));
// 顶点纹理坐标
glEnableVertexAttribArray(2);
glVertexAttribPointer(2, 2, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, TexCoords));
glBindVertexArray(0);
}
C++结构体有一个很棒的特性,它们的内存布局是连续的。如果我们将结构体作为一个数据数组使用,那么它将会以顺序排列结构体的变量,这将会直接转换为我们在数组缓冲中所需要的float(实际上是字节)数组。比如:
Vertex vertex;
vertex.Position = glm::vec3(0.2f, 0.4f, 0.6f);
vertex.Normal = glm::vec3(0.0f, 1.0f, 0.0f);
vertex.TexCoords = glm::vec2(1.0f, 0.0f);
// = [0.2f, 0.4f, 0.6f, 0.0f, 1.0f, 0.0f, 1.0f, 0.0f];
所以直接传入一大列的Vertex结构体的指针作为缓冲的数据,它们将会完美地转换为glBufferData所能用的参数:
glBufferData(GL_ARRAY_BUFFER, vertices.size() * sizeof(Vertex), &vertices[0], GL_STATIC_DRAW);
sizeof运算也可以用在结构体上来计算它的字节大小。这个应该是32字节的(8个float * 每个4字节)
结构体的另一个很好的用途是:它的预处理指令offsetof(s, m),它的第一个参数是一个结构体,第二个参数是这个结构体中变量的名字。这个宏会返回那个变量距结构体头部的字节偏移量(Byte Offset)。这正好可以用在定义glVertexAttribPointer函数中的偏移参数:
glVertexAttribPointer(1, 3, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, Normal));
偏移量现在是使用offsetof来定义了,在这里它会将法向量的字节偏移量设置为结构体中法向量的偏移量,也就是3个float,即12字节。注意,我们同样将步长参数设置为了Vertex结构体的大小。
网格渲染
在渲染网格之前,在调用glDrawElements函数之前需要先绑定相应的纹理。(并不知道这个网格(如果有的话)有多少纹理、纹理是什么类型的。所以我们该如何在着色器中设置纹理单元和采样器?)
设定一个命名标准:每个漫反射纹理被命名为:texture_diffuseN,每个镜面光纹理被命名为:texture_specularN。N的范围是1到纹理采样器最大允许的数字。
根据这个标准,在着色器中定义任意需要数量的纹理采样器。渲染代码如下:
void Draw(Shader shader)
{
unsigned int diffuseNr = 1;
unsigned int specularNr = 1;
for(unsigned int i = 0; i < textures.size(); i++)
{
glActiveTexture(GL_TEXTURE0 + i); // 在绑定之前激活相应的纹理单元
// 获取纹理序号(diffuse_textureN 中的 N)
string number;
string name = textures[i].type;
if(name == "texture_diffuse")
number = std::to_string(diffuseNr++);
else if(name == "texture_specular")
number = std::to_string(specularNr++);
shader.setInt(("material." + name + number).c_str(), i);
glBindTexture(GL_TEXTURE_2D, textures[i].id);
}
glActiveTexture(GL_TEXTURE0);
// 绘制网格
glBindVertexArray(VAO);
glDrawElements(GL_TRIANGLES, indices.size(), GL_UNSIGNED_INT, 0);
glBindVertexArray(0);
}
我们首先计算了每个纹理类型的N-分量,并将其拼接到纹理类型字符串上,来获取对应的uniform名称。接下来我们查找对应的采样器,将它的位置值设置为当前激活的纹理单元,并绑定纹理。这也是我们在Draw函数中需要着色器的原因。我们也将"material."添加到了最终的uniform名称中,因为我们希望将纹理储存在一个材质结构体中(这在每个实现中可能都不同)。
综上,代码如下:
#ifndef MESH_H
#define MESH_H
#include <glad/glad.h> // holds all OpenGL type declarations
#include <glm/glm.hpp>
#include <glm/gtc/matrix_transform.hpp>
#include <learnopengl/shader.h>
#include <string>
#include <vector>
using namespace std;
#define MAX_BONE_INFLUENCE 4
struct Vertex {
// position
glm::vec3 Position;
// normal
glm::vec3 Normal;
// texCoords
glm::vec2 TexCoords;
// tangent
glm::vec3 Tangent;
// bitangent
glm::vec3 Bitangent;
//bone indexes which will influence this vertex
int m_BoneIDs[MAX_BONE_INFLUENCE];
//weights from each bone
float m_Weights[MAX_BONE_INFLUENCE];
};
struct Texture {
unsigned int id;
string type;
string path;
};
class Mesh {
public:
// mesh Data
vector<Vertex> vertices;
vector<unsigned int> indices;
vector<Texture> textures;
unsigned int VAO;
// constructor
Mesh(vector<Vertex> vertices, vector<unsigned int> indices, vector<Texture> textures)
{
this->vertices = vertices;
this->indices = indices;
this->textures = textures;
// now that we have all the required data, set the vertex buffers and its attribute pointers.
setupMesh();
}
// render the mesh
void Draw(Shader &shader)
{
// bind appropriate textures
unsigned int diffuseNr = 1;
unsigned int specularNr = 1;
unsigned int normalNr = 1;
unsigned int heightNr = 1;
for(unsigned int i = 0; i < textures.size(); i++)
{
glActiveTexture(GL_TEXTURE0 + i); // active proper texture unit before binding
// retrieve texture number (the N in diffuse_textureN)
string number;
string name = textures[i].type;
if(name == "texture_diffuse")
number = std::to_string(diffuseNr++);
else if(name == "texture_specular")
number = std::to_string(specularNr++); // transfer unsigned int to string
else if(name == "texture_normal")
number = std::to_string(normalNr++); // transfer unsigned int to string
else if(name == "texture_height")
number = std::to_string(heightNr++); // transfer unsigned int to string
// now set the sampler to the correct texture unit
glUniform1i(glGetUniformLocation(shader.ID, (name + number).c_str()), i);
// and finally bind the texture
glBindTexture(GL_TEXTURE_2D, textures[i].id);
}
// draw mesh
glBindVertexArray(VAO);
glDrawElements(GL_TRIANGLES, static_cast<unsigned int>(indices.size()), GL_UNSIGNED_INT, 0);
glBindVertexArray(0);
// always good practice to set everything back to defaults once configured.
glActiveTexture(GL_TEXTURE0);
}
private:
// render data
unsigned int VBO, EBO;
// initializes all the buffer objects/arrays
void setupMesh()
{
// create buffers/arrays
glGenVertexArrays(1, &VAO);
glGenBuffers(1, &VBO);
glGenBuffers(1, &EBO);
glBindVertexArray(VAO);
// load data into vertex buffers
glBindBuffer(GL_ARRAY_BUFFER, VBO);
// A great thing about structs is that their memory layout is sequential for all its items.
// The effect is that we can simply pass a pointer to the struct and it translates perfectly to a glm::vec3/2 array which
// again translates to 3/2 floats which translates to a byte array.
glBufferData(GL_ARRAY_BUFFER, vertices.size() * sizeof(Vertex), &vertices[0], GL_STATIC_DRAW);
glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, EBO);
glBufferData(GL_ELEMENT_ARRAY_BUFFER, indices.size() * sizeof(unsigned int), &indices[0], GL_STATIC_DRAW);
// set the vertex attribute pointers
// vertex Positions
glEnableVertexAttribArray(0);
glVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)0);
// vertex normals
glEnableVertexAttribArray(1);
glVertexAttribPointer(1, 3, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, Normal));
// vertex texture coords
glEnableVertexAttribArray(2);
glVertexAttribPointer(2, 2, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, TexCoords));
// vertex tangent
glEnableVertexAttribArray(3);
glVertexAttribPointer(3, 3, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, Tangent));
// vertex bitangent
glEnableVertexAttribArray(4);
glVertexAttribPointer(4, 3, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, Bitangent));
// ids
glEnableVertexAttribArray(5);
glVertexAttribIPointer(5, 4, GL_INT, sizeof(Vertex), (void*)offsetof(Vertex, m_BoneIDs));
// weights
glEnableVertexAttribArray(6);
glVertexAttribPointer(6, 4, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, m_Weights));
glBindVertexArray(0);
}
};
#endif