目录
前言
1. 1/4悬架系统
1.1数学模型
1.2 LQR求解反馈阵阵(负反馈)
1.3仿真分析
2. 1/2悬架系统
2.1数学模型
2.2 LQR求解反馈阵阵(负反馈)
2.3仿真分析
3. 整车悬架系统
3.1数学模型
整车7自由度主动悬架数学模型
3.2 LQR求解反馈阵阵(负反馈)
3.3仿真分析
4.总结
参考文献
前言
对于最优控制LQR或者LQG,相比再熟悉不过,其主要在于确定性能指标的权重系数,之后求解Riccati方程,对于权重系数可以凭借经验去调节,“看重的”与"不看重的"进行调节,也可以采用层次分析法和优化算法进行调节。最优控制在现代控制领域可以说应用特别广泛,今天我梳理一下在2、4、7自由度悬架上的使用,并给出仿真结果。
对于往期也有几篇文章写过关于LQR在悬架上的应用,读者可以自行阅读:
基于遗传算法和粒子群算法的PID悬架控制、LQR悬架控制和滑模悬架控制_车辆悬架的遗传算法优化lqr_Mr. 邹的博客-CSDN博客
2自由度悬架LQR控制_Mr. 邹的博客-CSDN博客
基于层次分析法的轴间预瞄和轴距预瞄俯仰半车LQR控制仿真分析(重型汽车)_Mr. 邹的博客-CSDN博客
1. 1/4悬架系统
1.1数学模型
![]()
![]()

这里不再做过多的介绍了,往期有一个合集文章介绍了:
半车(前后、左右)、整车悬架详细推导建模和simulink仿真分析_半车动力学模型_Mr. 邹的博客-CSDN博客
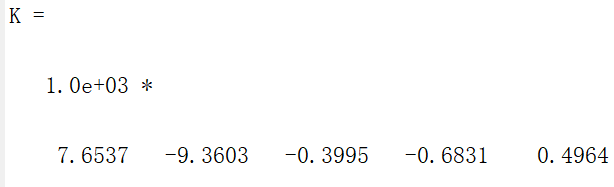
1.2 LQR求解反馈阵阵(负反馈)
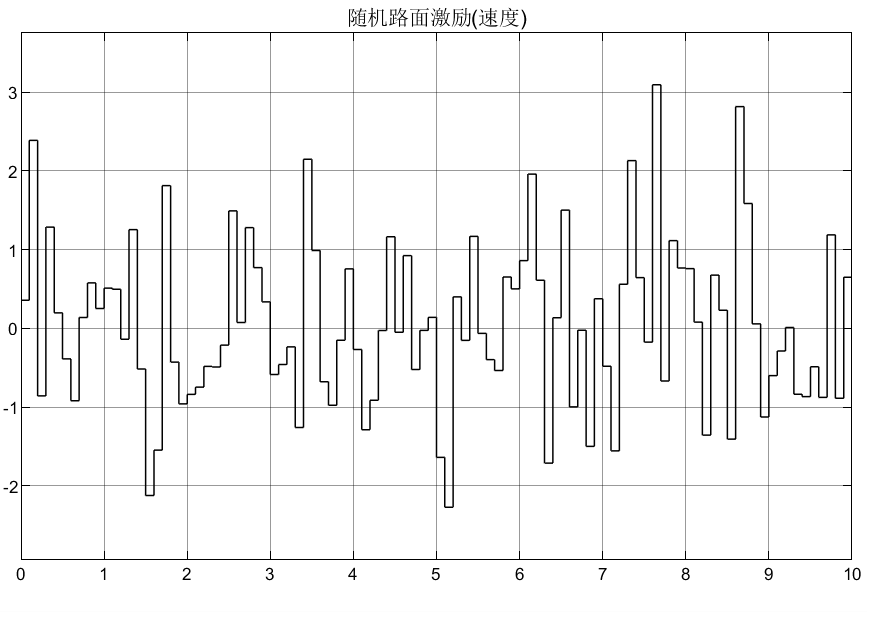
1.3仿真分析
2. 1/2悬架系统
2.1数学模型

2.2 LQR求解反馈阵阵(负反馈)

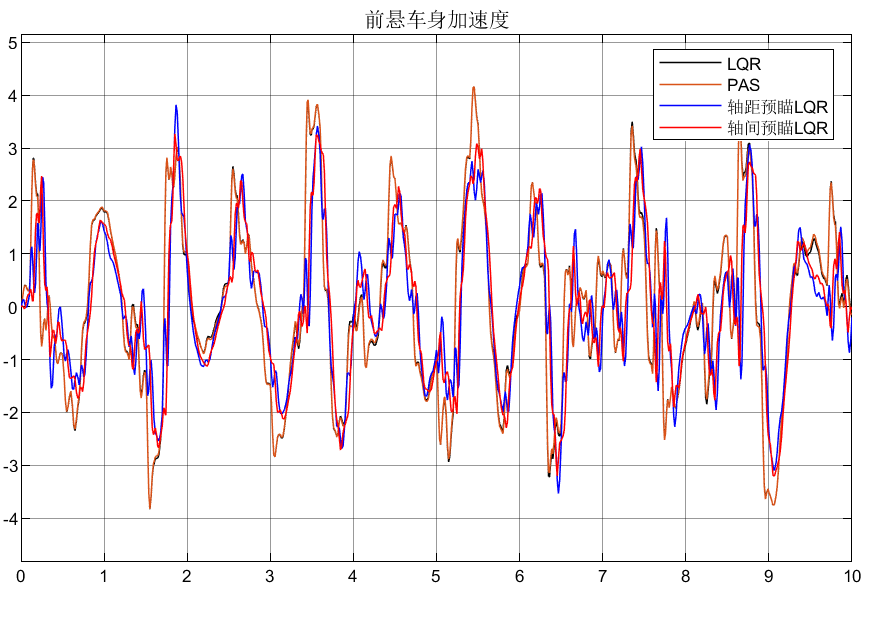
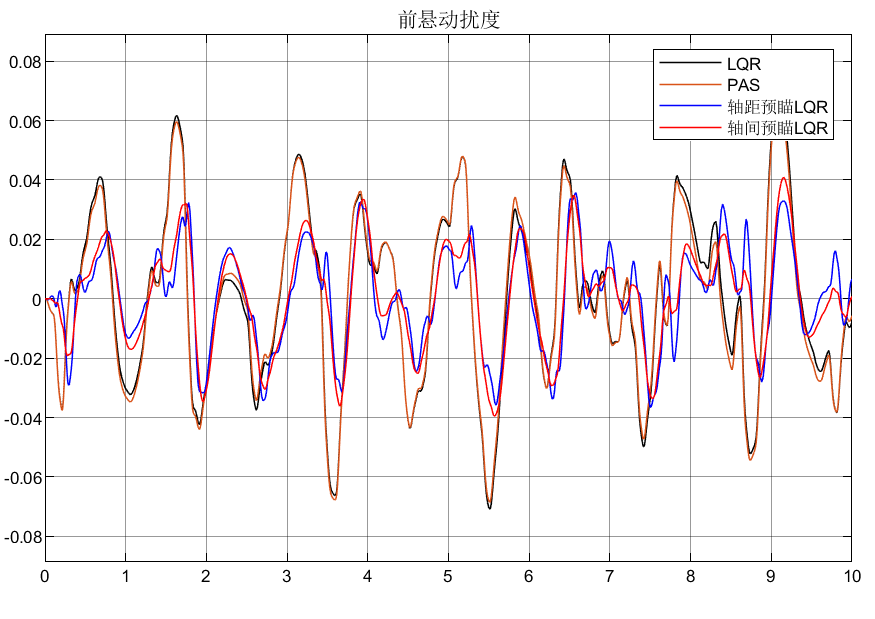
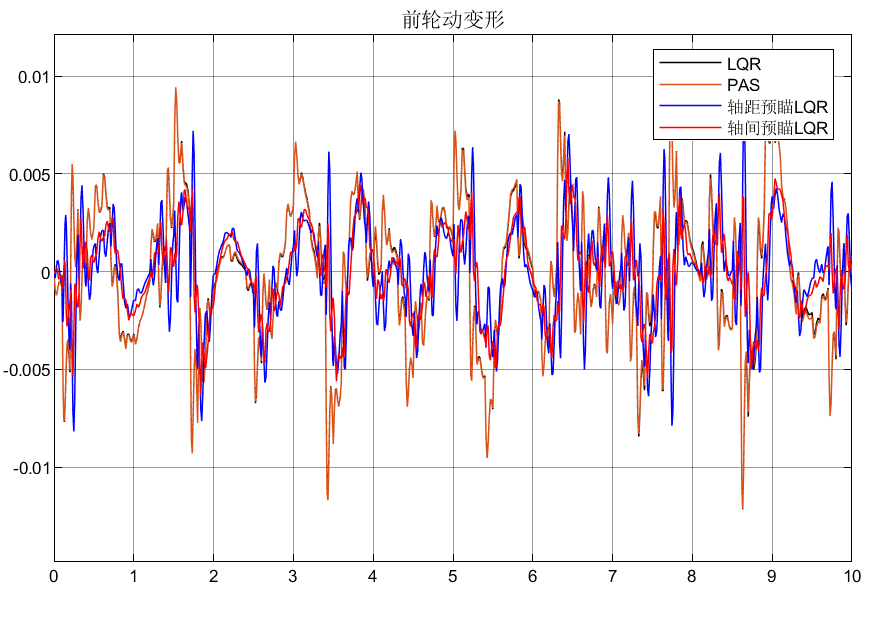
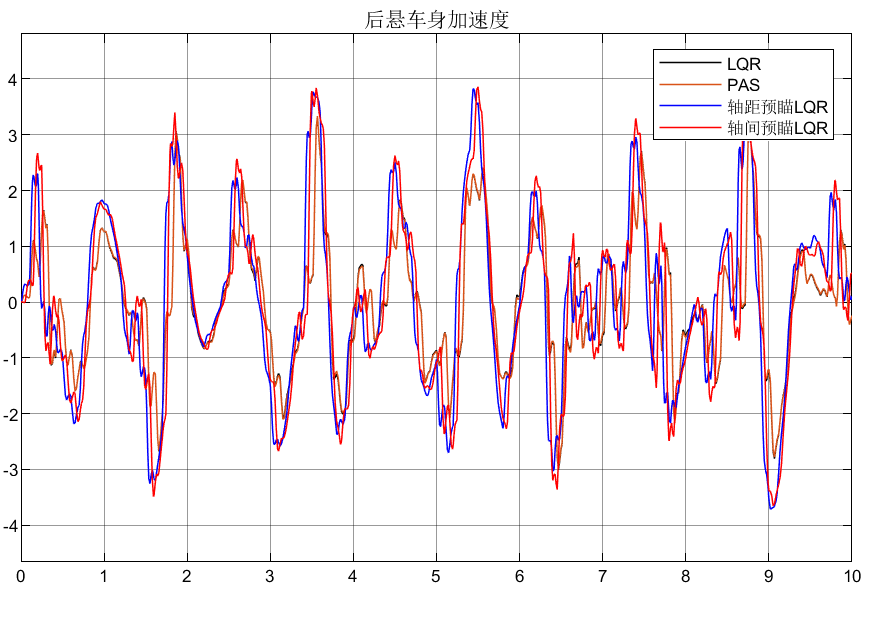
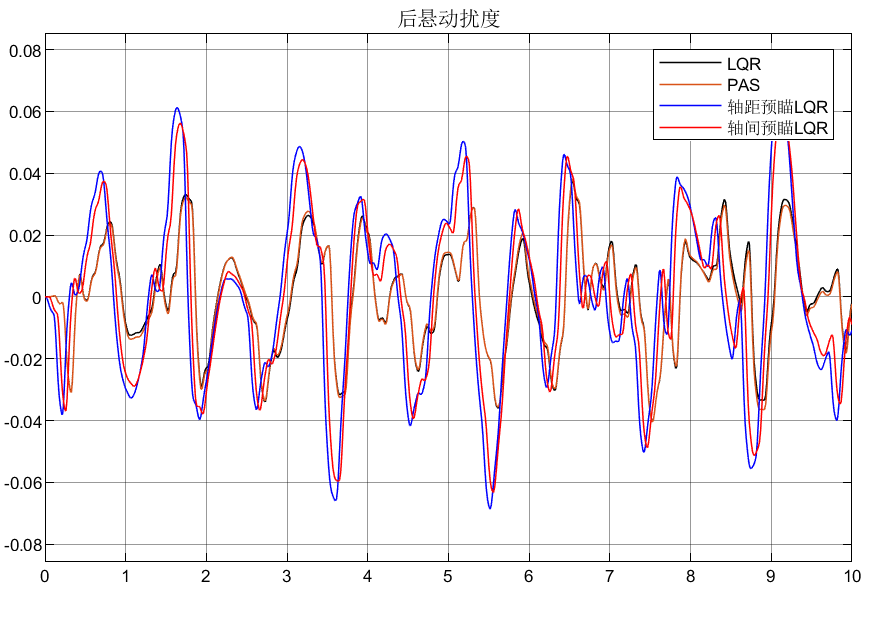
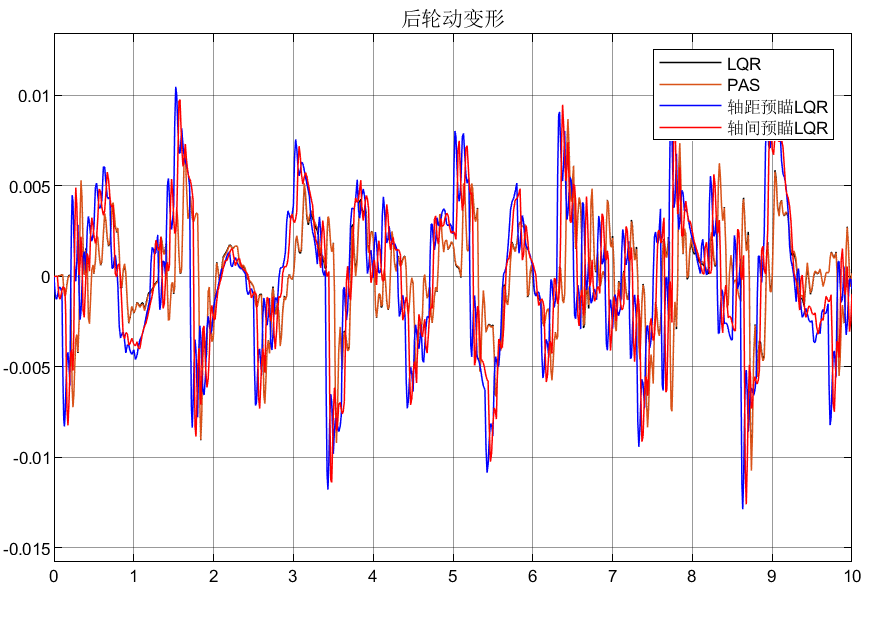
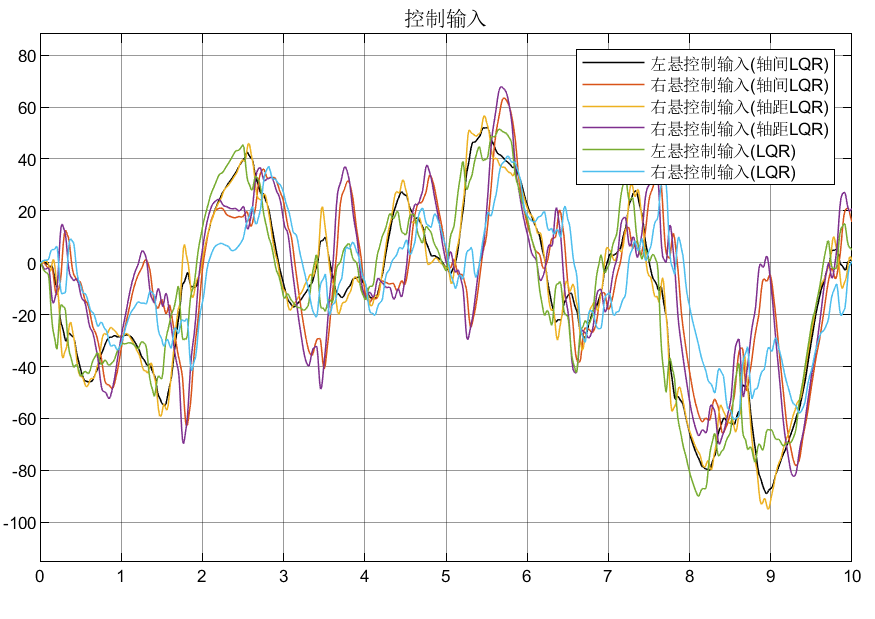
2.3仿真分析
这里引入轴间预瞄和轴距预瞄进行优化:

3. 整车悬架系统
3.1数学模型
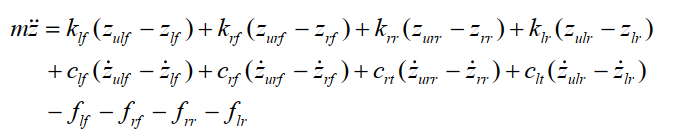
整车7自由度主动悬架数学模型

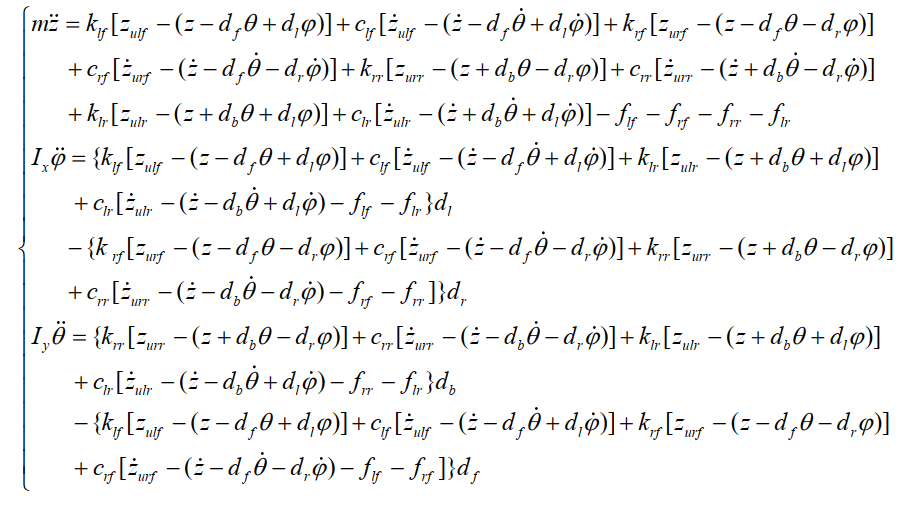
簧载垂向运动方程:
侧倾运动方程为:

俯仰运动方程为:

非簧载质量垂向运动方程为:

做出俯仰角θ和侧倾角φ很小的假设,所以有如下近似条件:
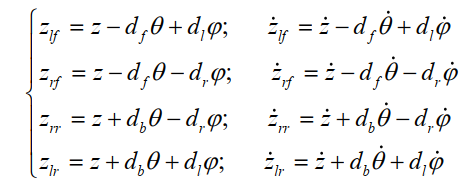
整理汇总得:

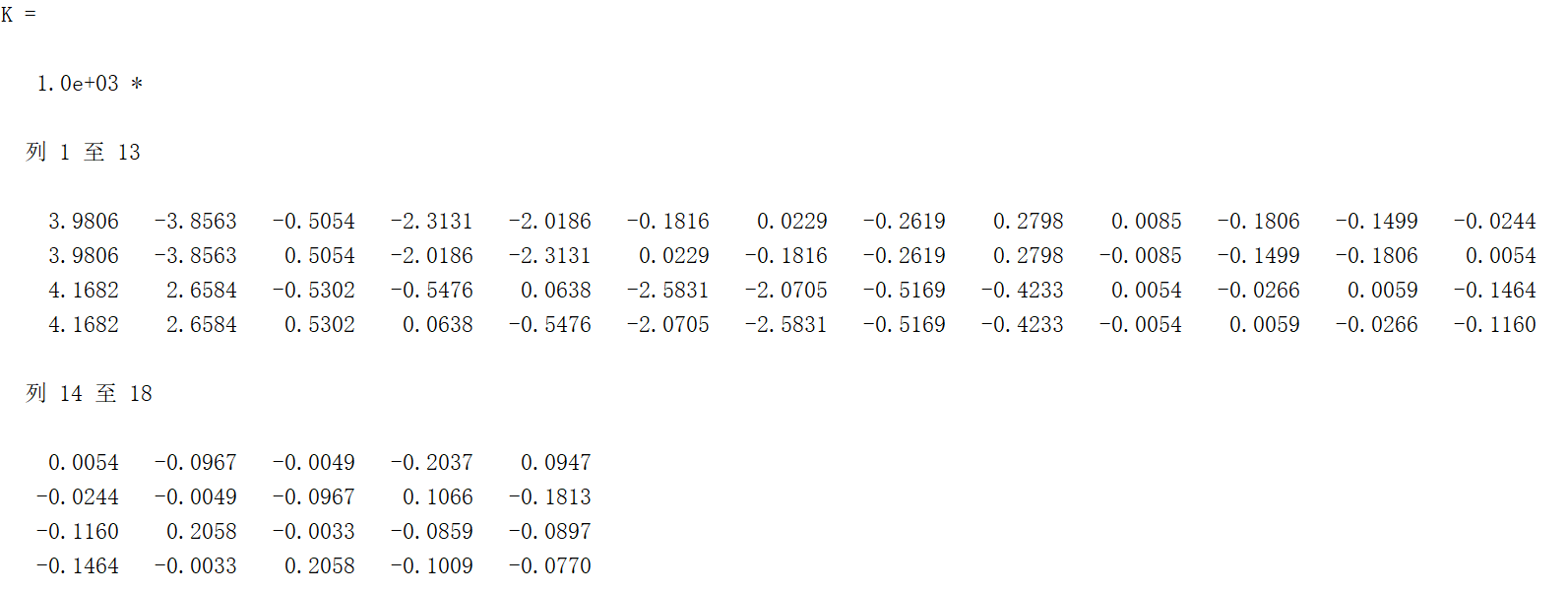
3.2 LQR求解反馈阵阵(负反馈)
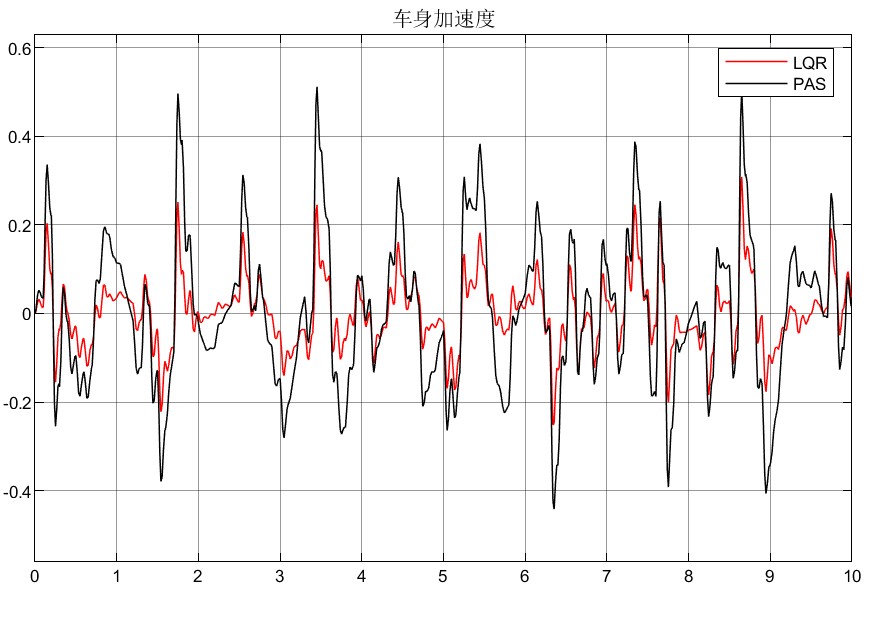
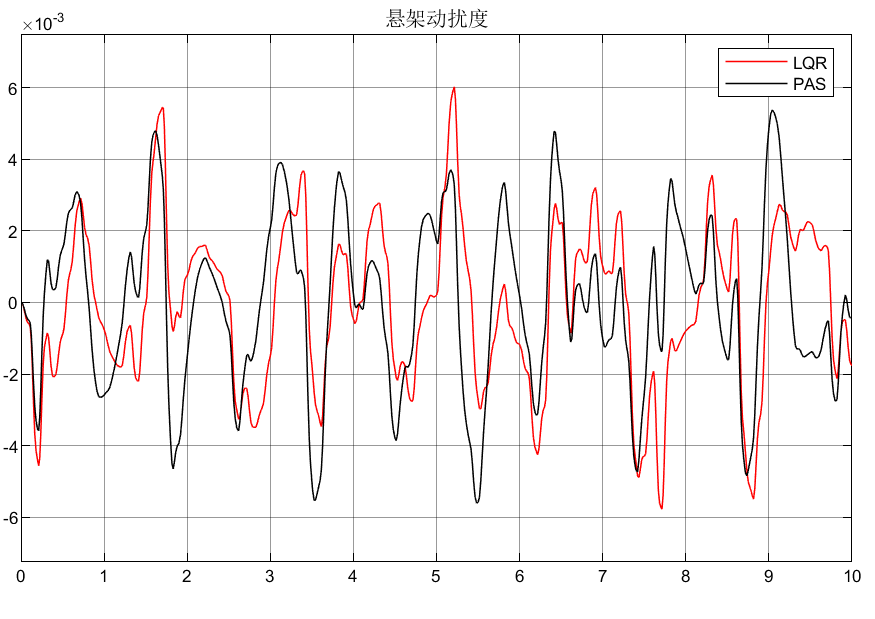
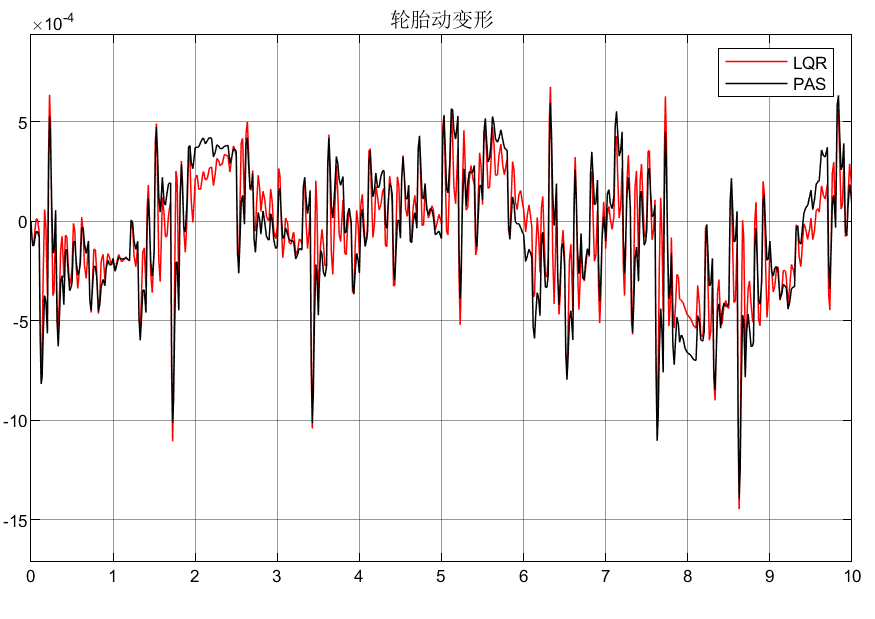
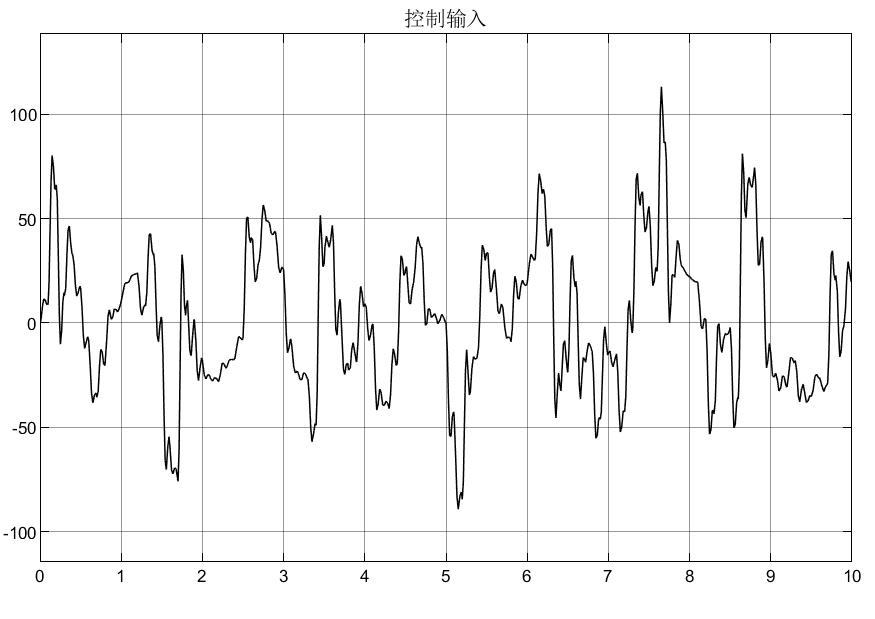
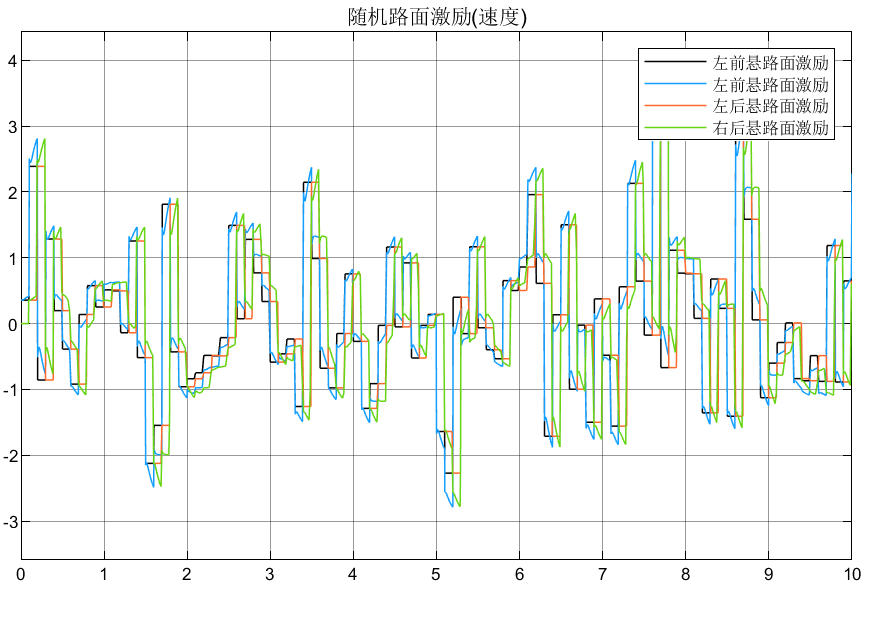
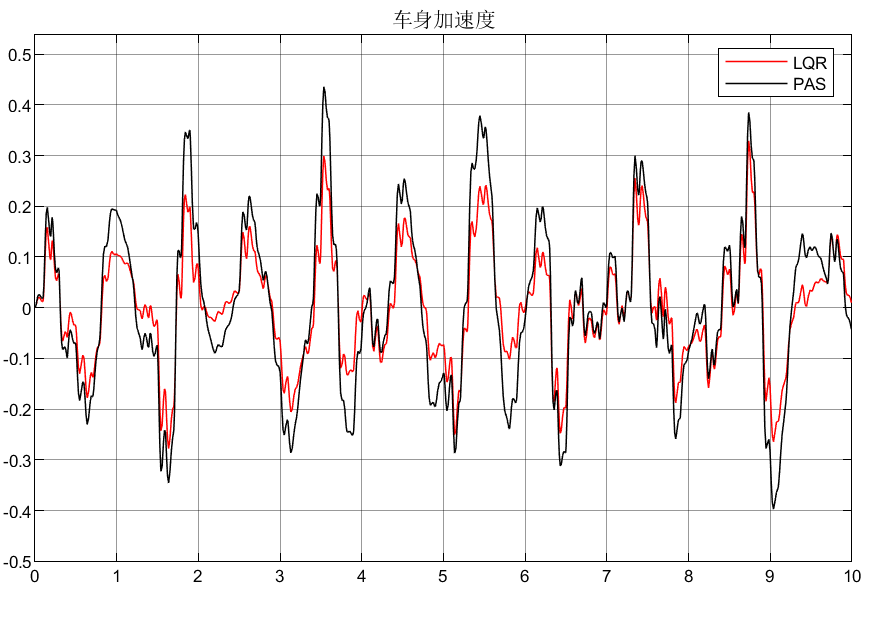
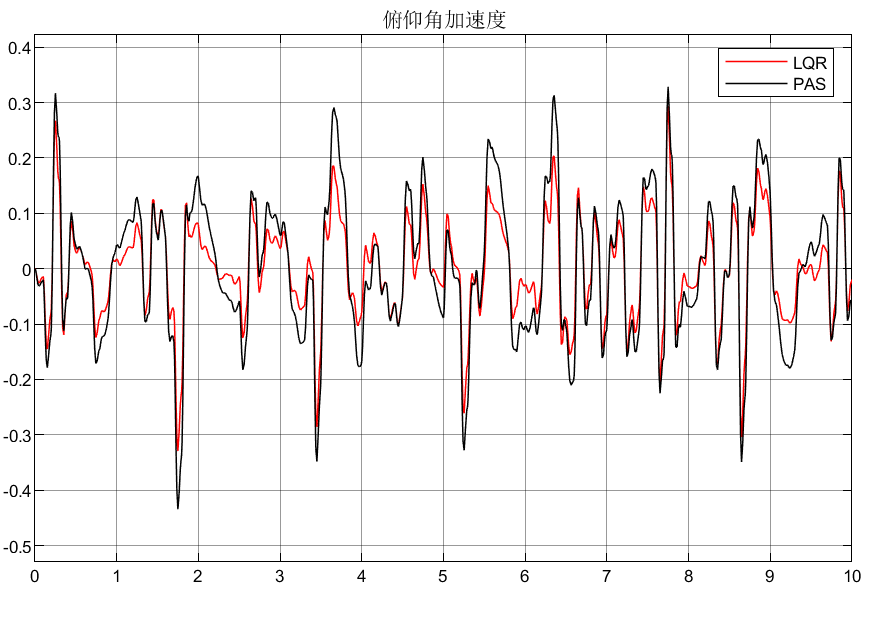
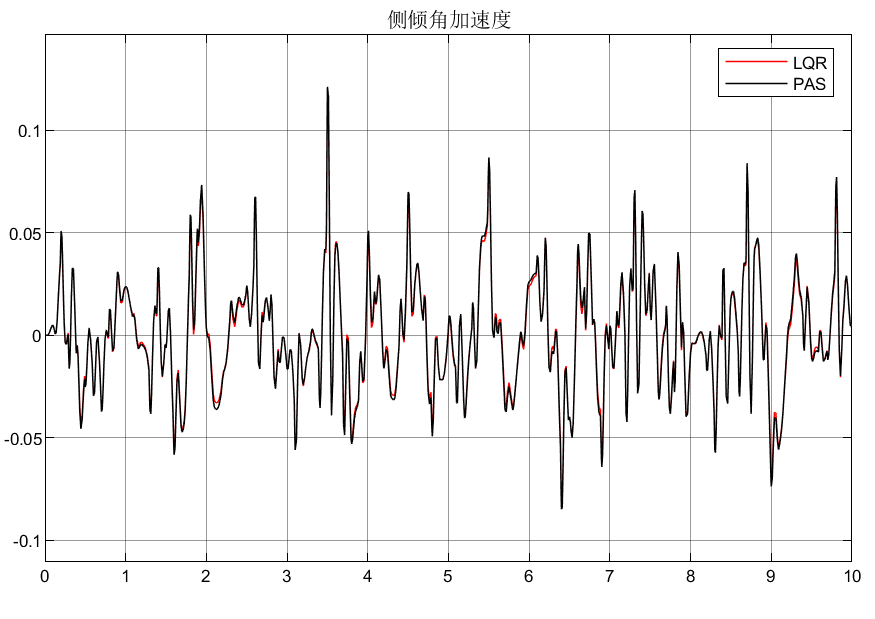
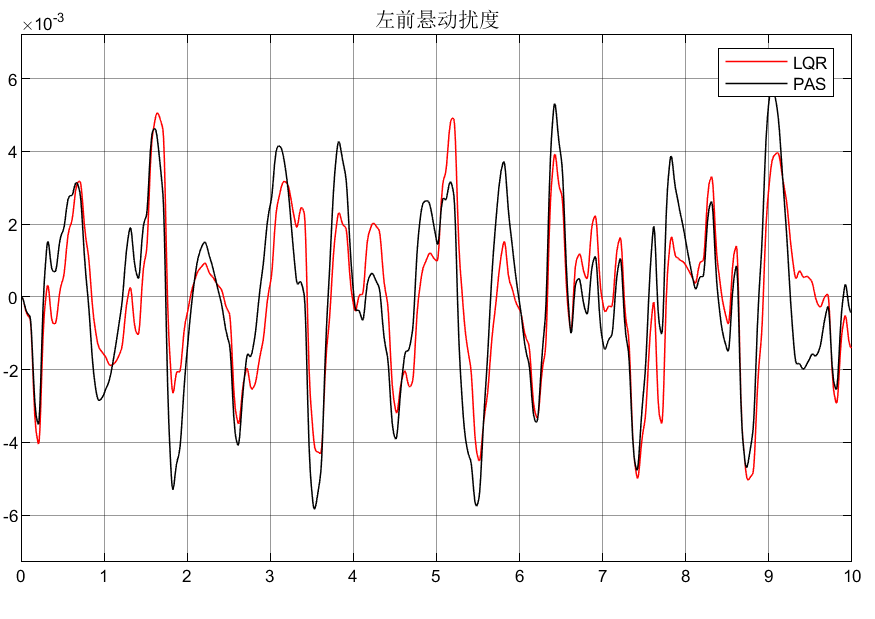
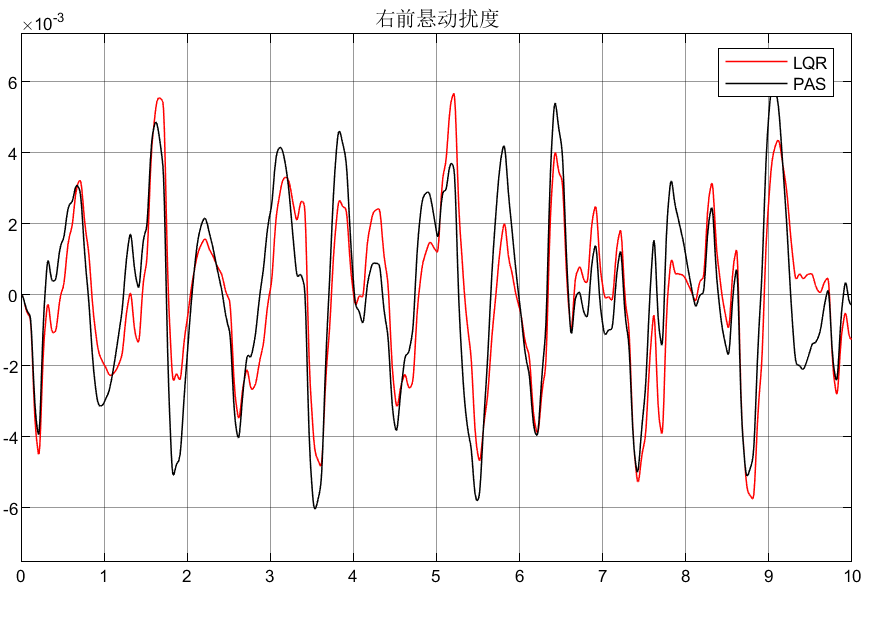
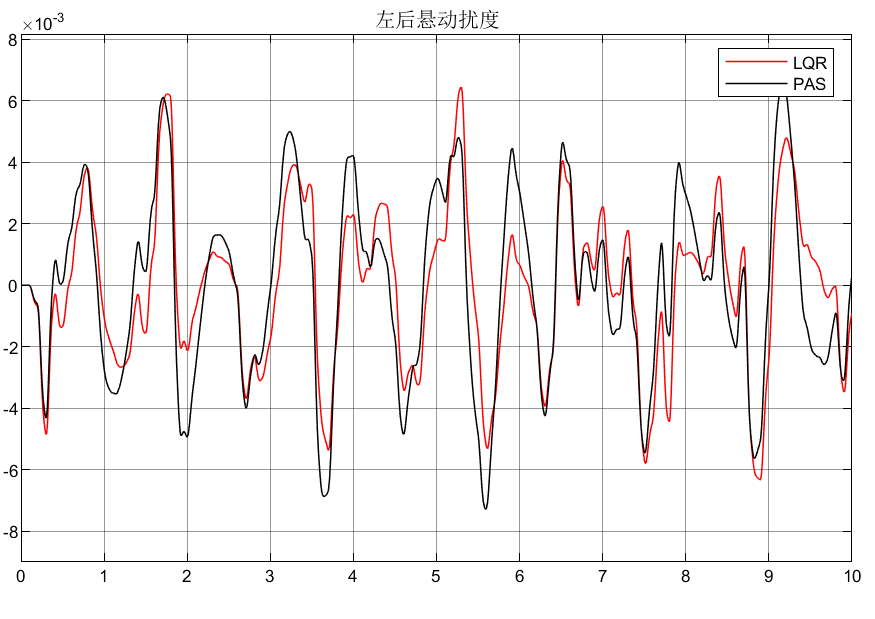
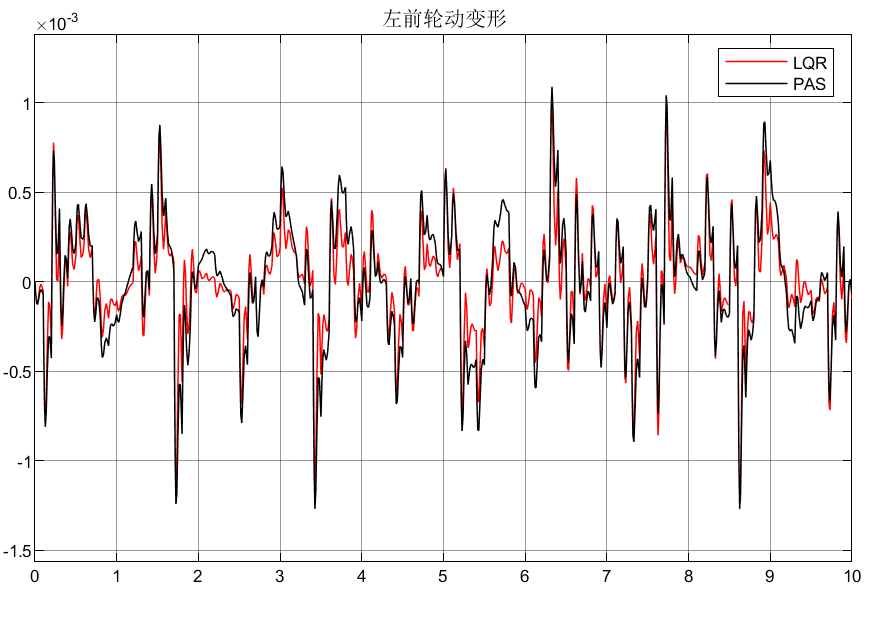
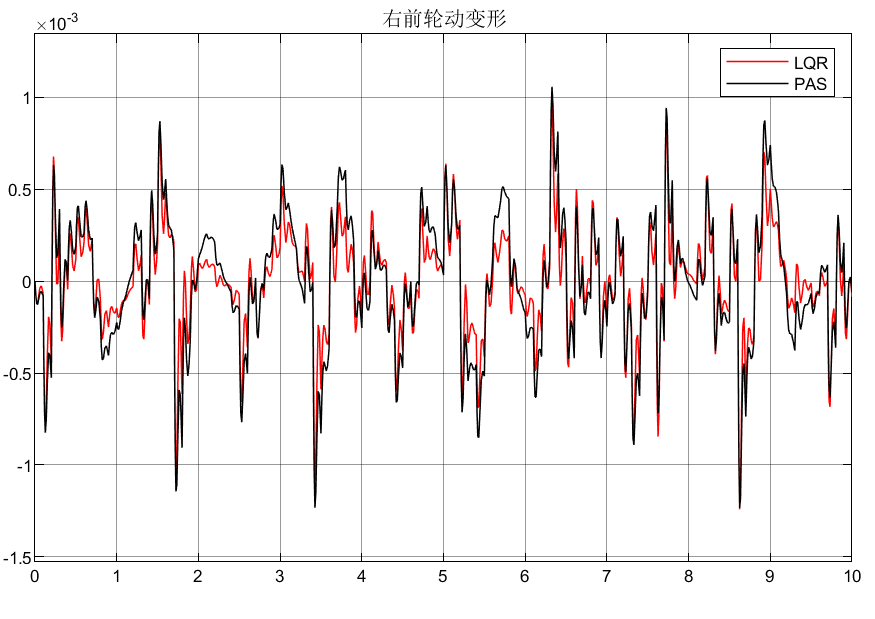
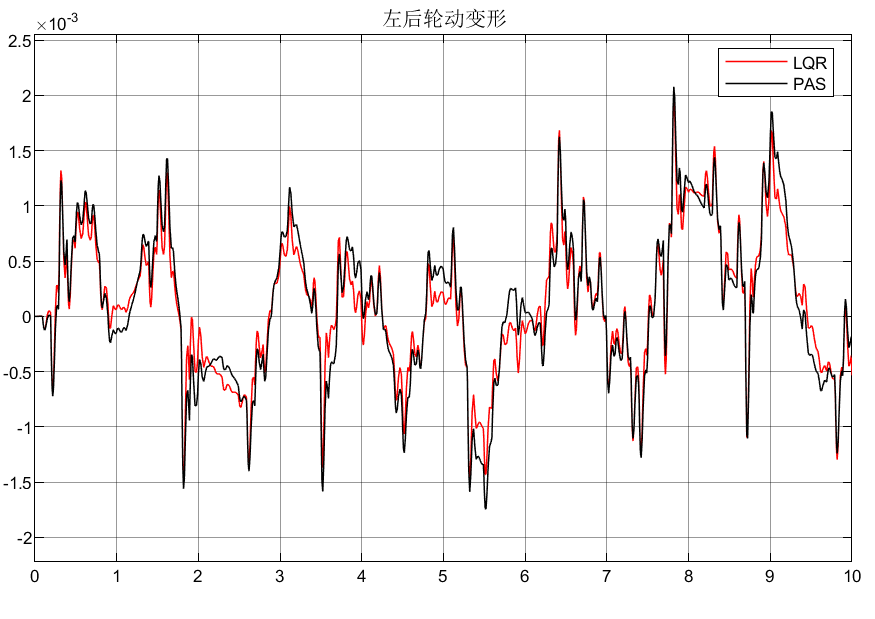
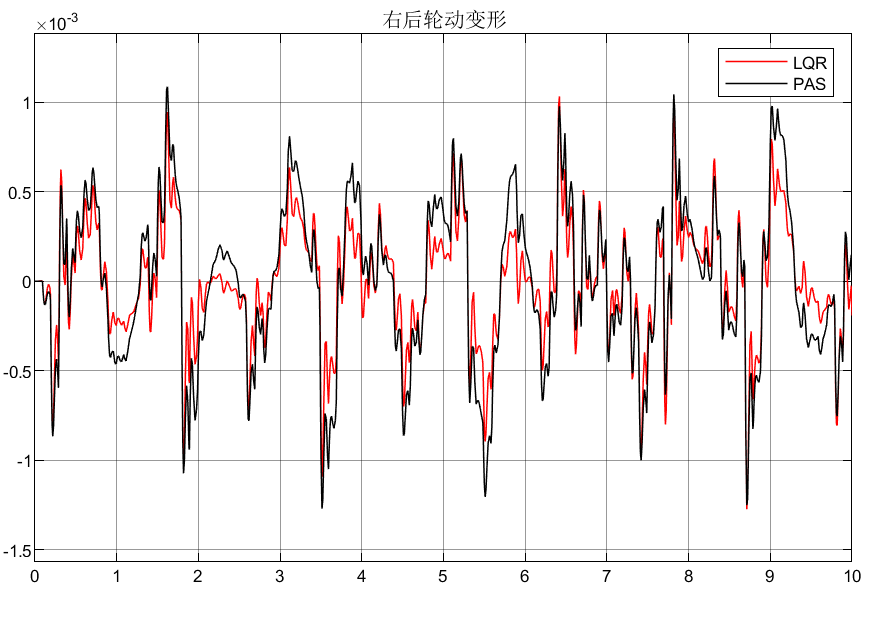
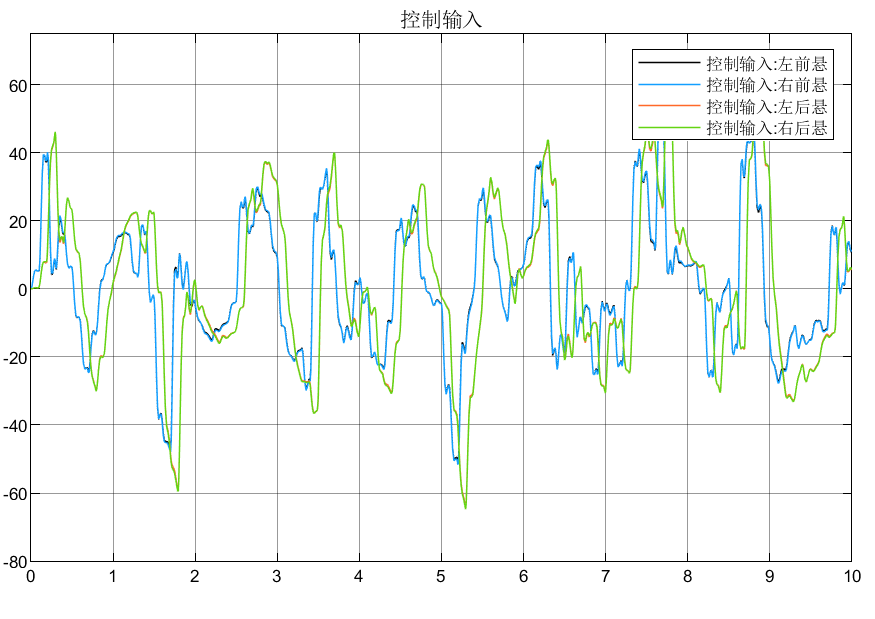
3.3仿真分析

4.总结
1.对于LQR的优化即权重系数的优化
2.对于悬架系统状态变量的选择会包含路面,所以输入常为速度,这样的理由是可以使目标性能的控制路面输入矩阵为0矩阵,即只有一项交叉项
参考文献
[1]. 丁芳,王波,刘明岩. 汽车主动悬架LQR控制研究[J]. 机械设计与研究,2020,36(4):52-56.
[2]. 陈少航,章桐. 半主动悬架LQR控制策略的仿真研究[J]. 佳木斯大学学报(自然科学版),2013,31(2):179-181,185. DOI:10.3969/j.issn.1008-1402.2013.02.005.
[3]. 龙金莲,张玉分,卢家暄,等. 汽车主动悬架LQR控制器平顺性控制仿真[J]. 计算机仿真,2018,35(4):102-106. DOI:10.3969/j.issn.1006-9348.2018.04.021.
[4]. 胡斐,赵治国. 主动悬架LQR控制加权系数多目标遗传算法优化[J]. 机械与电子,2011(2):28-31. DOI:10.3969/j.issn.1001-2257.2011.02.007.
[5]悬架结构参数优化及基于卡尔曼滤波的主动悬架控制研究_李芳
[6]秦民,董波,马天飞,等. 基于轴间预瞄的主动悬架研究[J]. 汽车工程,2004,26(2):193-196. DOI:10.3321/j.issn:1000-680X.2004.02.019.
[7]李金辉,何杰,李旭宏. 基于轴距预瞄的重型汽车主动悬架道路友好性研究[J]. 公路交通科技,2013,30(11):152-158. DOI:10.3969/j.issn.1002-0268.2013.11.024.
[8]考虑路面预瞄信息和参数不确定性的空气悬架半主动控制
[9]潘公宇,陈立付,张庆庆. 七自由度模型下主动空气悬架最优控制研究[C]. //2010中国汽车工程学会年会论文集. 2010:1453-1458.
[10]杨广旭. 车辆半主动悬架最优控制方法研究[D]. 吉林:吉林大学,2022.