文章目录
- openpnnp - 载入板子后,要确定板子的放置角度
- 概述
- 用openpnp提供的功能来确定被夹住的板子的左下角原点位置和板子的角度
- 备注
- END
openpnnp - 载入板子后,要确定板子的放置角度
概述
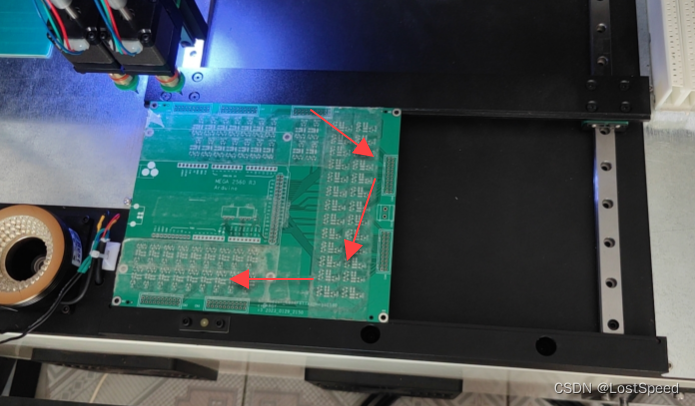
设备是有夹具的, 用百分表打过, 夹具本身在Z方向的平行度是没问题的.
但是, PCB板子的边不一定是非常平滑的, 也有可能PCB的边就不平行, 不是一个标准矩形.
这样会导致板子被夹具夹住后, 还是会在XY平面上旋转, 如果不算板子的坐标角度, 就会导致元件位置有误.
前面做的实验(openpnp - error - 微调mark点坐标后,更新板子其他原件其他坐标报错的变通方法), 没有考虑到板子装入夹具时, 导致的XY平面的角度偏移.
用openpnp提供的功能来确定被夹住的板子的左下角原点位置和板子的角度
先大致将顶部相机光标放在板子左下角.初步捕获板子原点坐标.

此时, 板子角度默认是0(默认假设板子是平行的, 没有旋转角度的偏移).
Z高度(吸嘴从安全高度下降到板子的距离), 采用的是Z1轴的Z方向低限位高度.
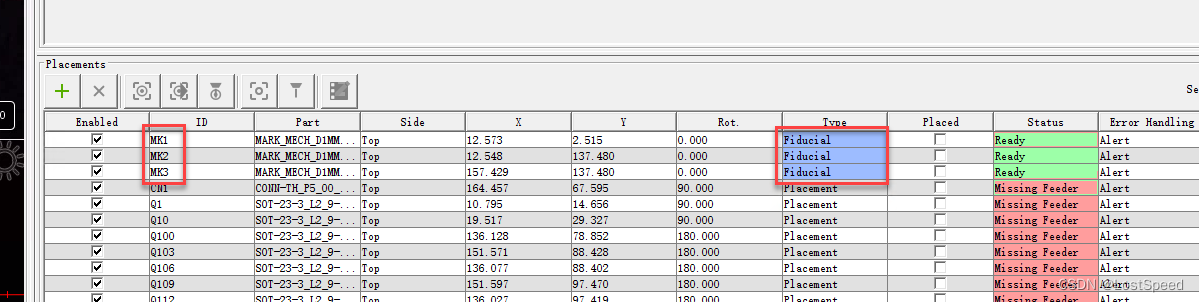
载入坐标文件(named csv), 将3个mark点原件类型选择为定位类型.
开始用多个mark点来确定板子的精确位置和角度
在左边相机界面下出现提示.
根据提示, 在placement表中, 将3个mark点都选中, 然后点击提示狂的Next按钮
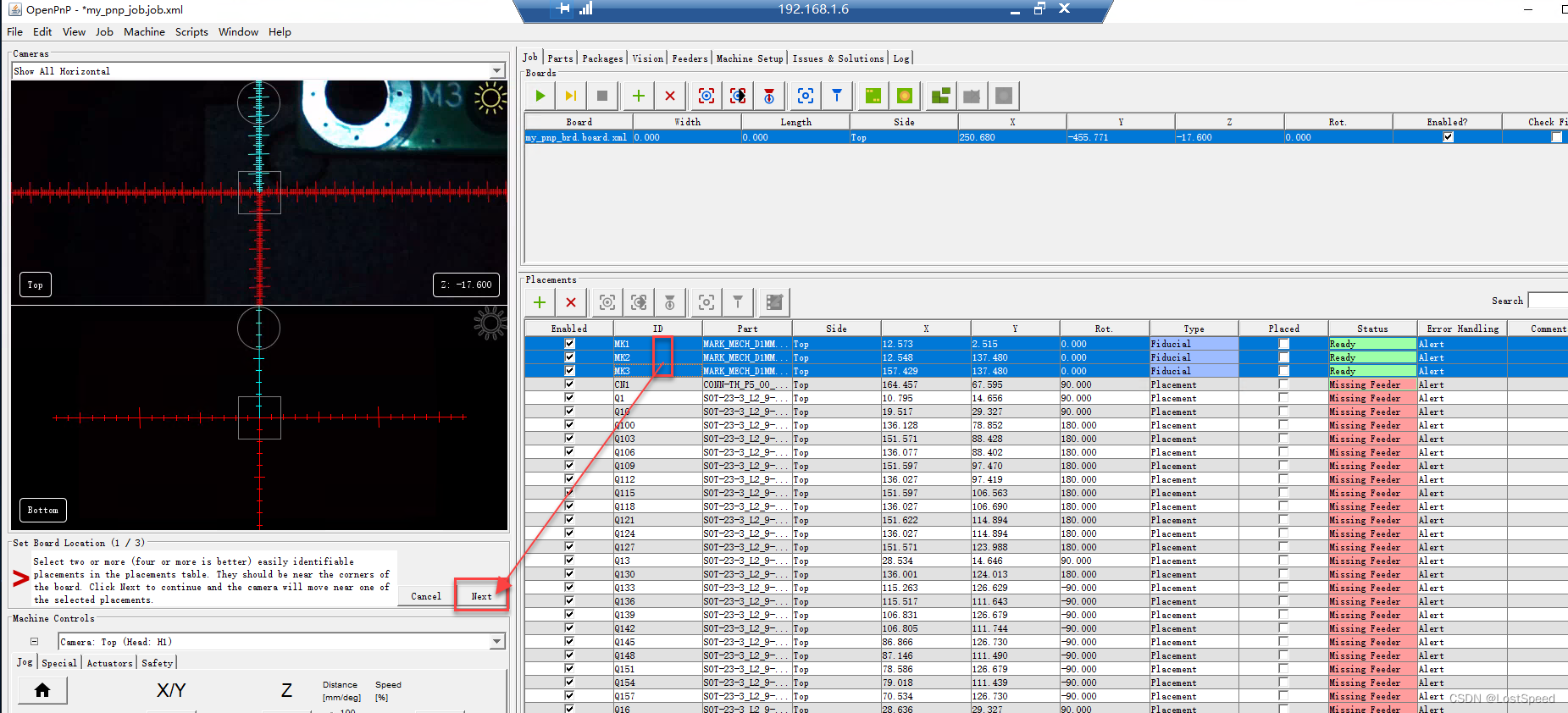
这是, openpnp会将顶部相机移动到其中的一个Mark点附近(因为我们左下角板子原点的定位就是大致确定, 差几mm), 用JOG面板移动顶部相机十字线到openpnp移动到的mark点的精确位置, 然后点击提示框上的Next按钮.
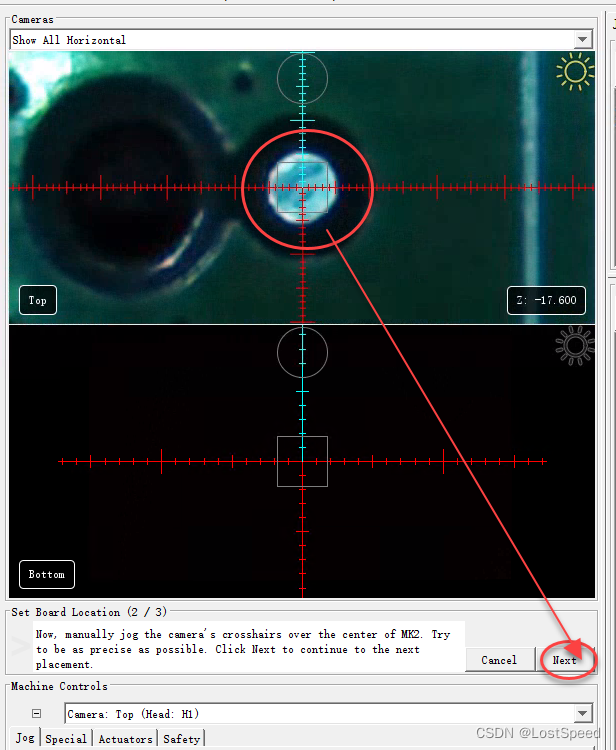
openpnp会移动到第2个mark点附近, 同样精确对中该mark点, 点击提示框的Next按钮.
openpnp会移动到第3个mark点附近, 同样精确对中该mark点, 点击提示框的Next按钮.
当我们选的3个Mark点的精确位置都选择完后, 点击提示框的Finish按钮, 就可以精确确定板子左下角的原点和板子的XY平面的旋转角度了.
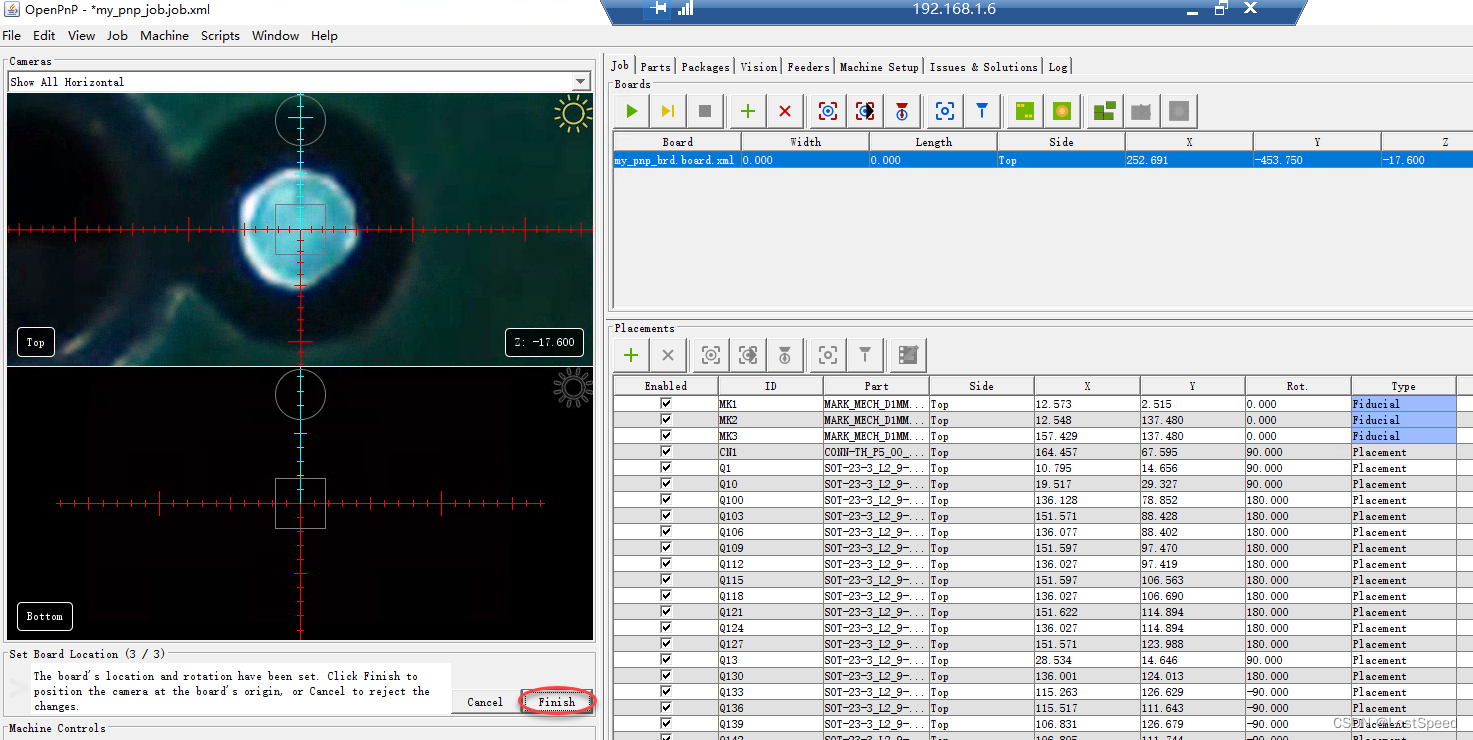
此时, 顶部相机移动到精确定位后的板子左下角原点, 并且能看到, 确实板子夹住后, 是有微小旋转角度的.

记得保存job
备注
现在已经确定了精确的板子左下角原点, 3个Mark点的精确位置, 板子由于夹具和板子粗造度引起的轻微旋转角度.
下一步任务, 是根据以上数据, 更新其他原件的坐标和角度.
但是这一步, 我的设备识别这3个Mark点失败. 得再查资料, 看看咋弄? 如果其他元件不根据以上数据更新坐标和角度, 还是有误差的.
试了一下, 浏览其他元件, 误差不大, 最多差0.2mm.