在上一篇文章【点云处理】点云法向量估计及其加速(4)中我们尝试对pcl自带的KDTree的k近邻搜索过程使用OpenMP加速,效果比较明显,有将近1倍的提速。在这篇文章中我们暂时放弃pcl自带的KDTree,转而使用另一大杀器nanflann库提供的KDTree。nanoflann是一个c++11标准库,用于构建具有不同拓扑(R2,R3(点云),SO(2)和SO(3)(2D和3D旋转组))的KD树。nanoflann 算法对fastann进行了改进,效率以及内存使用等方面都进行了优化,而且代码十分轻量级且开源。nanoflann不需要编译或安装,你只需要在你的代码中加入#include <nanoflann.hpp>即可方便快捷地使用它。好了,下面使用nanoflann对我们的代码进行改写。
#include <time.h>
#include <cmath>
#include <functional>
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/console/time.h>
#include <pcl/gpu/features/features.hpp>
#include <omp.h>
#include <pcl/features/normal_3d_omp.h>
#include <pcl_conversions/pcl_conversions.h>
#include <spdlog/spdlog.h>
#include "KDTreeTableAdaptor.h"
int main(int argc, char** argv) {
ros::init(argc, argv, "n_lidar_gpu_normal");
ros::NodeHandle node;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
const boost::function<void (const boost::shared_ptr<sensor_msgs::PointCloud2 const>&)> callback =[&](sensor_msgs::PointCloud2::ConstPtr msg_pc_ptr) {
pcl::fromROSMsg(*msg_pc_ptr, *cloud);
size_t cloud_size = cloud->size();
int dim=3,k=10;
float* points = new float[cloud_size*dim];
for (int i=0; i<cloud_size; i++) {
float* p = points + i*dim;
p[0] = cloud->points[i].x;
p[1] = cloud->points[i].y;
p[2] = cloud->points[i].z;
}
auto t1 = std::chrono::steady_clock::now();
KDTreeTableAdaptor<float,float> kdtree(cloud_size, dim, points, 64);
std::vector<std::vector<int>> neighbors_all(cloud_size,std::vector<int>(k));
std::vector<int> sizes(cloud_size,k);
for (int i=0; i<cloud_size; i++) {
std::vector<size_t> out_ids(k);
std::vector<float> out_dists_sqr(k);
nanoflann::KNNResultSet<float> result_set(k);
result_set.init(&out_ids[0], &out_dists_sqr[0]);
kdtree.index->findNeighbors(result_set, &points[i*dim], nanoflann::SearchParams(k));
for (int j=0; j<k; j++) {
neighbors_all[i][j] = out_ids[j];
}
}
auto t2 = std::chrono::steady_clock::now();
delete []points;
std::vector<int> flatten_neighbors_all(k * cloud_size);
pcl::gpu::PtrStep<int> ps(&flatten_neighbors_all[0], k * pcl::gpu::PtrStep<int>::elem_size);
for (size_t i=0; i<cloud_size; ++i) {
std::copy(neighbors_all[i].begin(), neighbors_all[i].end(), ps.ptr(i));
}
pcl::gpu::NeighborIndices gpu_neighbor_indices;
pcl::gpu::NormalEstimation::PointCloud gpu_cloud;
gpu_cloud.upload(cloud->points);
gpu_neighbor_indices.upload(flatten_neighbors_all, sizes, k);
pcl::gpu::NormalEstimation::Normals gpu_normals;
pcl::gpu::NormalEstimation::computeNormals(gpu_cloud, gpu_neighbor_indices, gpu_normals);
pcl::gpu::NormalEstimation::flipNormalTowardsViewpoint(gpu_cloud, 0.f, 0.f, 0.f, gpu_normals);
auto t3 = std::chrono::steady_clock::now();
auto compute_normal_time = std::chrono::duration<double,std::milli>(t3 - t2);
std::vector<pcl::PointXYZ> normals;
gpu_normals.download(normals);
auto t4 = std::chrono::steady_clock::now();
auto knn_time = std::chrono::duration<double,std::milli>(t2-t1);
auto total_time = std::chrono::duration<double,std::milli>(t4-t1);
spdlog::info("cloud size:{:d}, knn_time:{:.3f} ms,compute_normal_time:{:.3f} ms, total_time:{:.3f} ms", cloud->size(), knn_time.count(), compute_normal_time.count(), total_time.count());
};
ros::Subscriber pc_sub = node.subscribe<sensor_msgs::PointCloud2>("/BackLidar/lslidar_point_cloud", 1, callback);
ros::spin();
return 0;
}
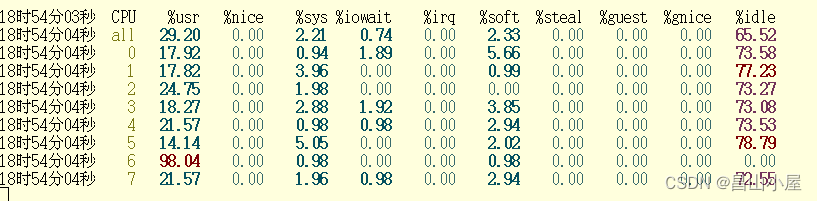
对于for循环遍历查找k近邻索引部分我们先不加"# pragma omp parallel for",编译运行。
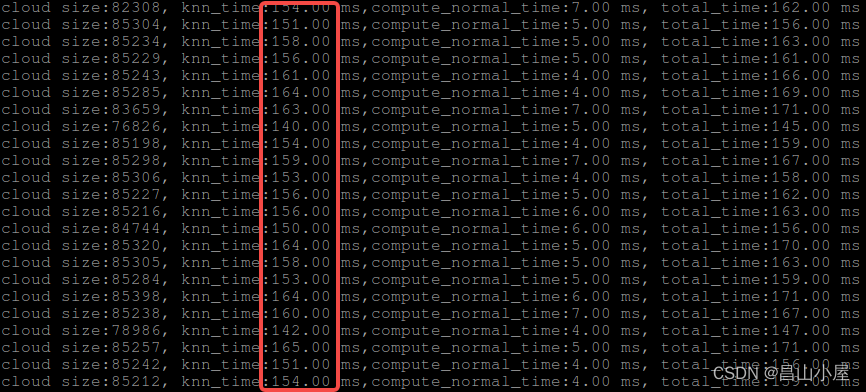
哇,加速效果明显,8w点云knn时间从400ms降到150ms左右。比pcl自带KDTree使用上OpenMP并行加速还要快。
要是能利用OpenMP做并行加速,岂不是要起飞??!!加上OpenMP加速试一试。
# pragma omp parallel for
for (int i=0; i<cloud_size; i++) {
std::vector<size_t> out_ids(k);
std::vector<float> out_dists_sqr(k);
nanoflann::KNNResultSet<float> result_set(k);
result_set.init(&out_ids[0], &out_dists_sqr[0]);
kdtree.index->findNeighbors(result_set, &points[i*dim], nanoflann::SearchParams(k));
for (int j=0; j<k; j++) {
neighbors_all[i][j] = out_ids[j];
}
}
编译运行,测试结果如下:
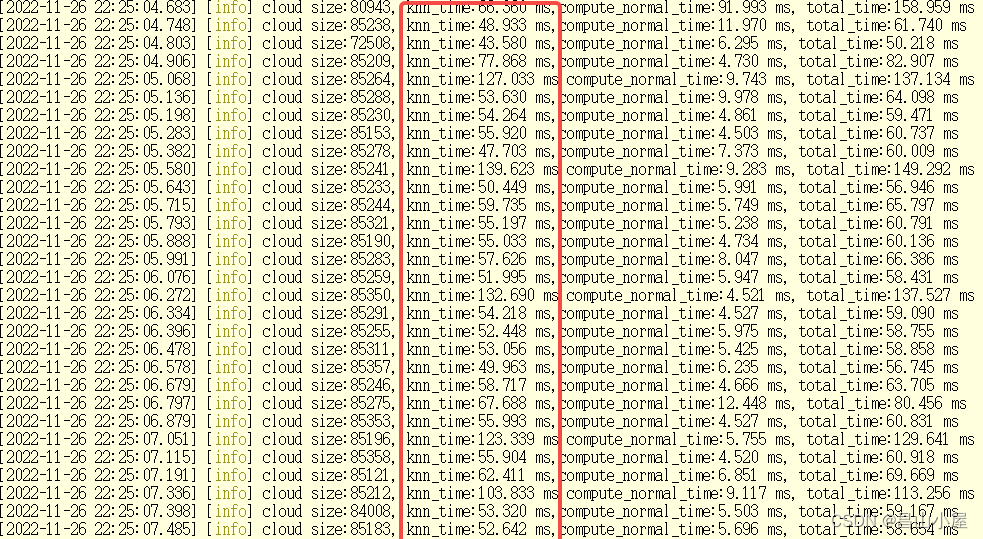
哇,虽然有波动,但常能在50ms左右徘徊,相比曾几何时的400ms提速了8倍。 多核算力分配也很均衡,完美!
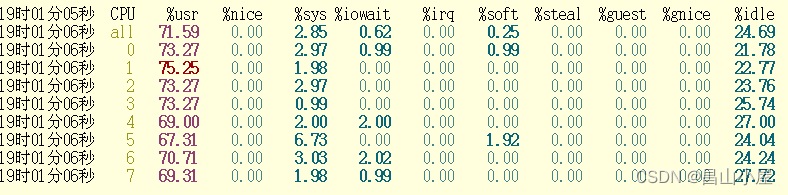
所以,knn加速哪家强,nanoflann+OpenMP当称王!!!
【参考文献】
在C++中使用openmp进行多线程编程_线上幽灵的博客-CSDN博客_c++ omp
PCL GPU实现计算法线和曲率 - 知乎