on-policy的定义:behavior policy和target-policy相同的是on-policy,不同的是off-policy。
behavior policy:采样数据的策略,影响的是采样出来s,a的分布。
target policy:就是被不断迭代修改的策略。
如果是基于深度的算法,那么非常好分辨:目标函数里面一定有s和a的期望,而计算梯度的时候使用了SGD,把一个采样作为了期望的值。但是这里面还有一个隐含的限制就是采样遵循的分布必须是s,a的分布。
因此分辨是否是on-policy的,只需要看目标函数。如果目标函数中s,a的分布和策略相关的,那么一定是on-policy的,如果是策略无关的,那么一定是off-policy的。
比如DQN的目标函数:
这里一个(s,a)对看成一个随机变量,服从均匀分布,因此分布和策略无关(至于为什么s,a是均匀分布,那个是算法自己假设的),因此采样的时候需要用到experience replay,使得不管什么策略采样得到的reward,都变成均匀分布的。
因此用了experice replay之后,随便什么策略采样,虽然采样出来s,a服从那个策略的分布,但是经过experice replay之后还是变成了均匀分布。
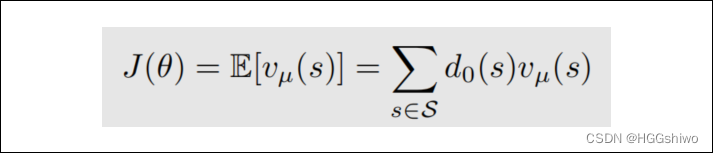
比如PG:

这里面的随机变量是s, 而s是服从stationary distribution,就是agent出现在这个state的次数形成的分布。而这个分布和策略pi是相关的,因此是on-policy的(改变策略之后,agent出现的概率也改变了)
比如DPG:
这里面的分布d是一个常数(这是为了计算梯度方便),因此DPG中s,a的采样和策略无关,是off-policy的。
比如PPO:
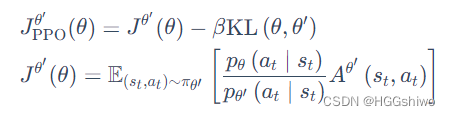
就是一个期望+一个类似正则项的东西,而非常明显看出来,这个期望是服从策略theta’的,也就是说s,a分布和策略相关,因此是on-policy的。
简单说下PPO:PPO用两个网络表示策略,一个是theta’一个是theta,用theta’网络的策略采样reward,得到的reward给theta的网络梯度下降。看起来怎么用了两个策略? 其实两个策略最后慢慢收敛到一起的,是一个策略。如果是off-policy是完全和策略无关的。