1. 伺服相关部分配置
1.1 伺服相关版本
SV660N 试机建议使用“SV660N-Ecat_v0.09.xml”及以上设备描述文件。
SV660N 单板软件版本建议为“H0100=901.4”及更高版本号。
1.2 相关参数说明
SV660N 对象字典中 60FD 的含义较 IS620N 有所更改:bit0、1、2 分别为负限位、正限
位、原点开关,bit16—bit20 分别对应 DI1—DI5。
2. 基恩士 KV7500 后台软件配置
基恩士后台软件为“KV STUDIO 9.45”及以上,低版本不支持基恩士 Ethercat 模块“KV-
XH16EC”的扩展。
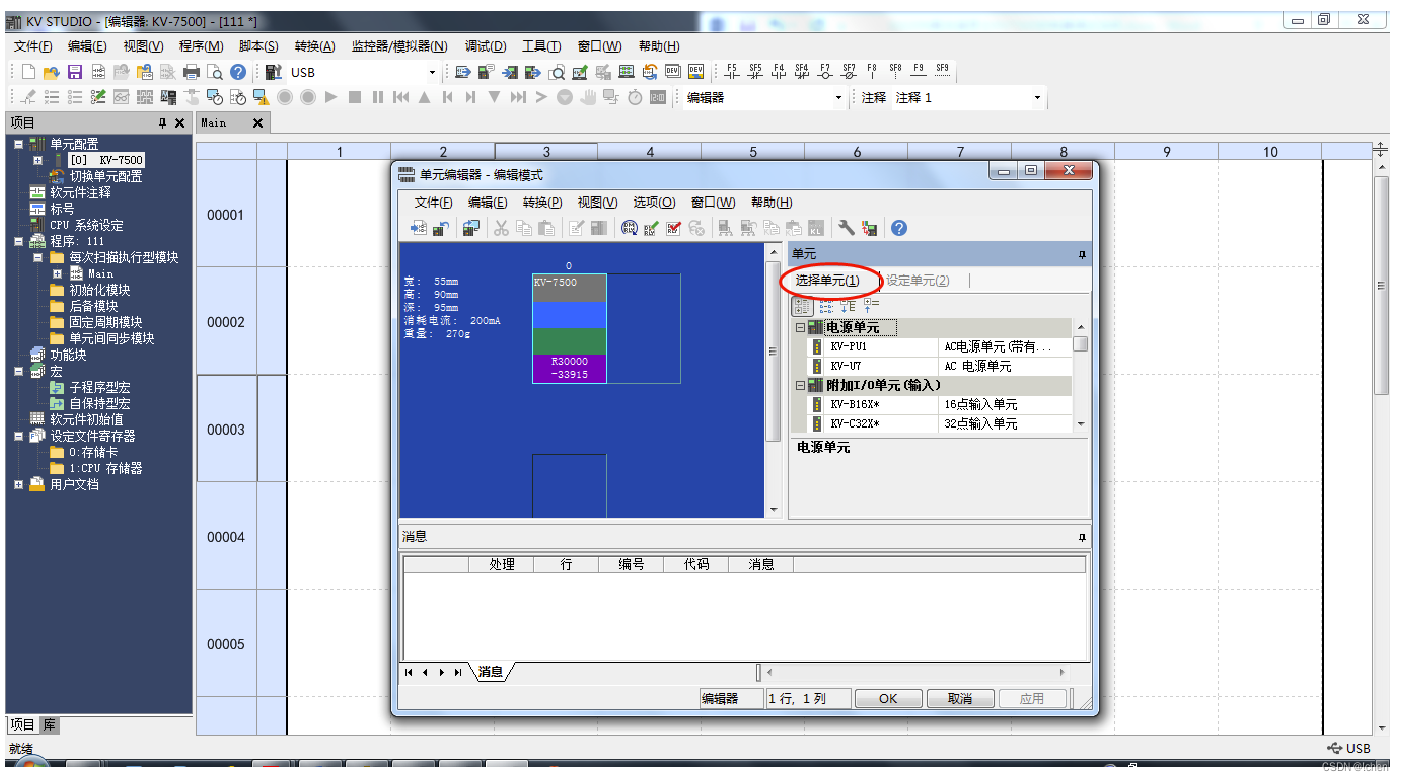
2.1 单元配置设定
新建项目,确定后将自动弹出单元配置设定。根据提示,按需要选择“是”、“否”,“读取
单元配置”。
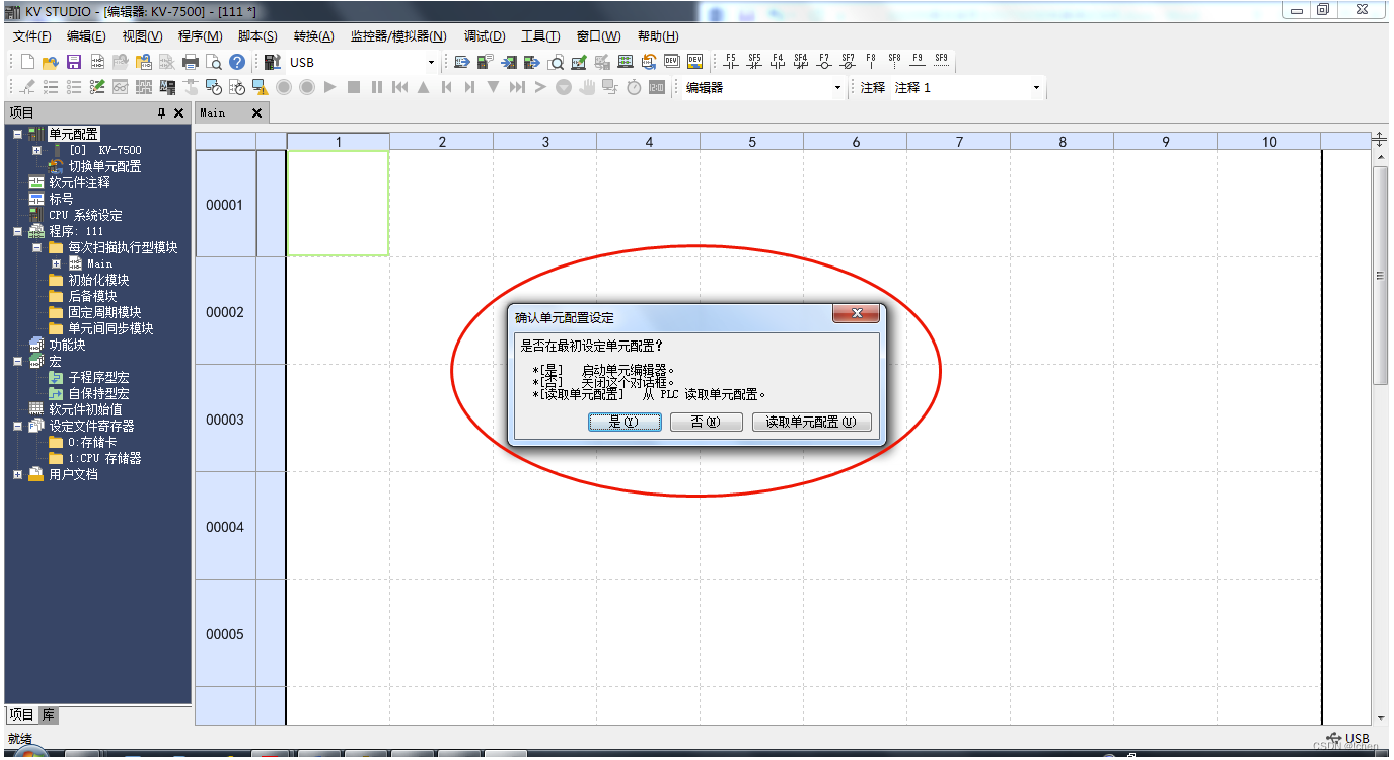
在 PLC 物理单元已经连接妥当,并与后台软件建立了通讯连接的情况下,选择“读取单
元配置”,后台软件将自动根据物理连接自动获取单元配置。
若选择“是”,将自动弹出单元编辑器对话框,可以通过拖拽已及双击的形式选择所需要
的单元进行配置。
 若选择“否”,可以通过“工具”-“单元编辑器”打开或者直接双击左边“项目”工作空间中
若选择“否”,可以通过“工具”-“单元编辑器”打开或者直接双击左边“项目”工作空间中
“单元配置”目录下“[0] KV7500”进行打开。

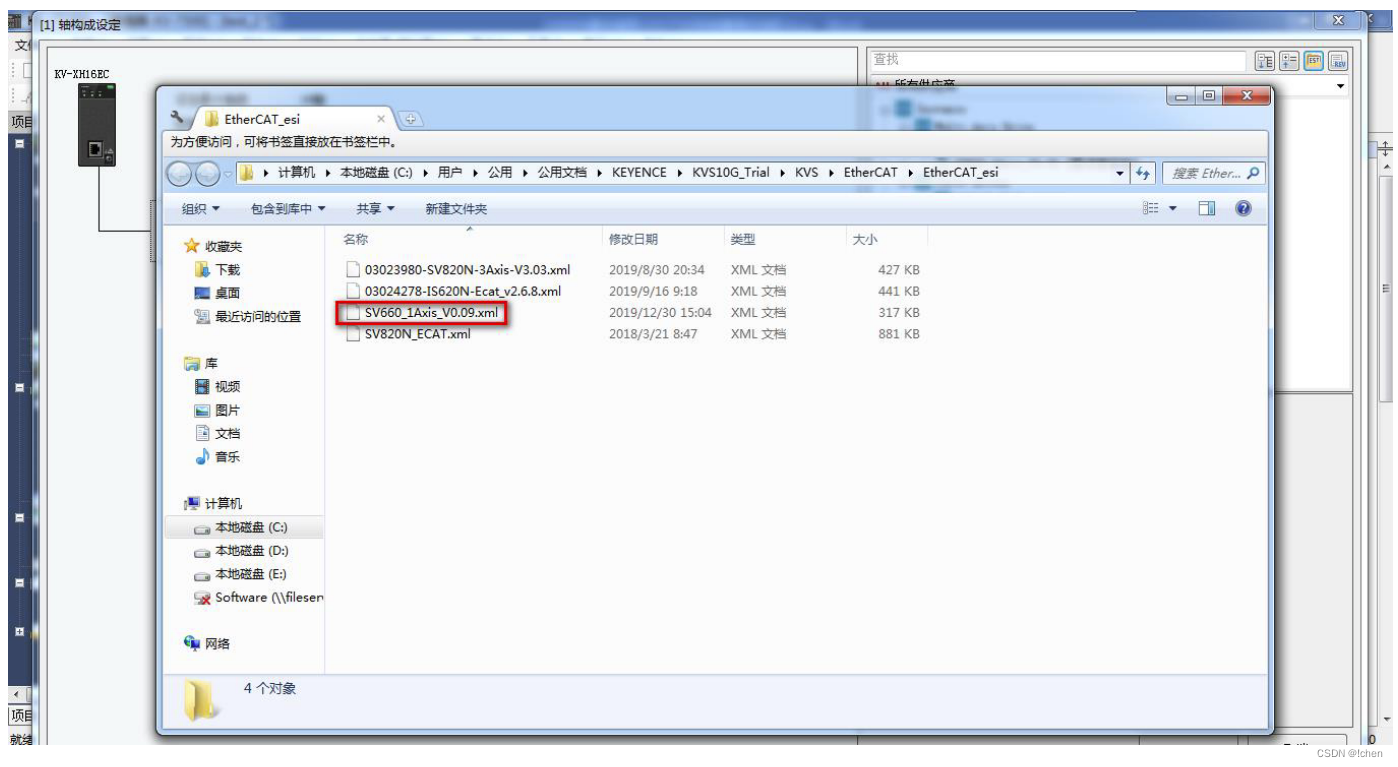
2.2 轴构成设定
打开轴构成设定,找到“ESI 文件注册”,双击打开。找到设备描述文件“.XML”存储位置,
打开,即可导入“.XML”文件。设备描述文件导入成功后,即可以添加轴。同时在轴构成
设定中,也可以设置控制周期。最小为 250us,默认为 1ms。
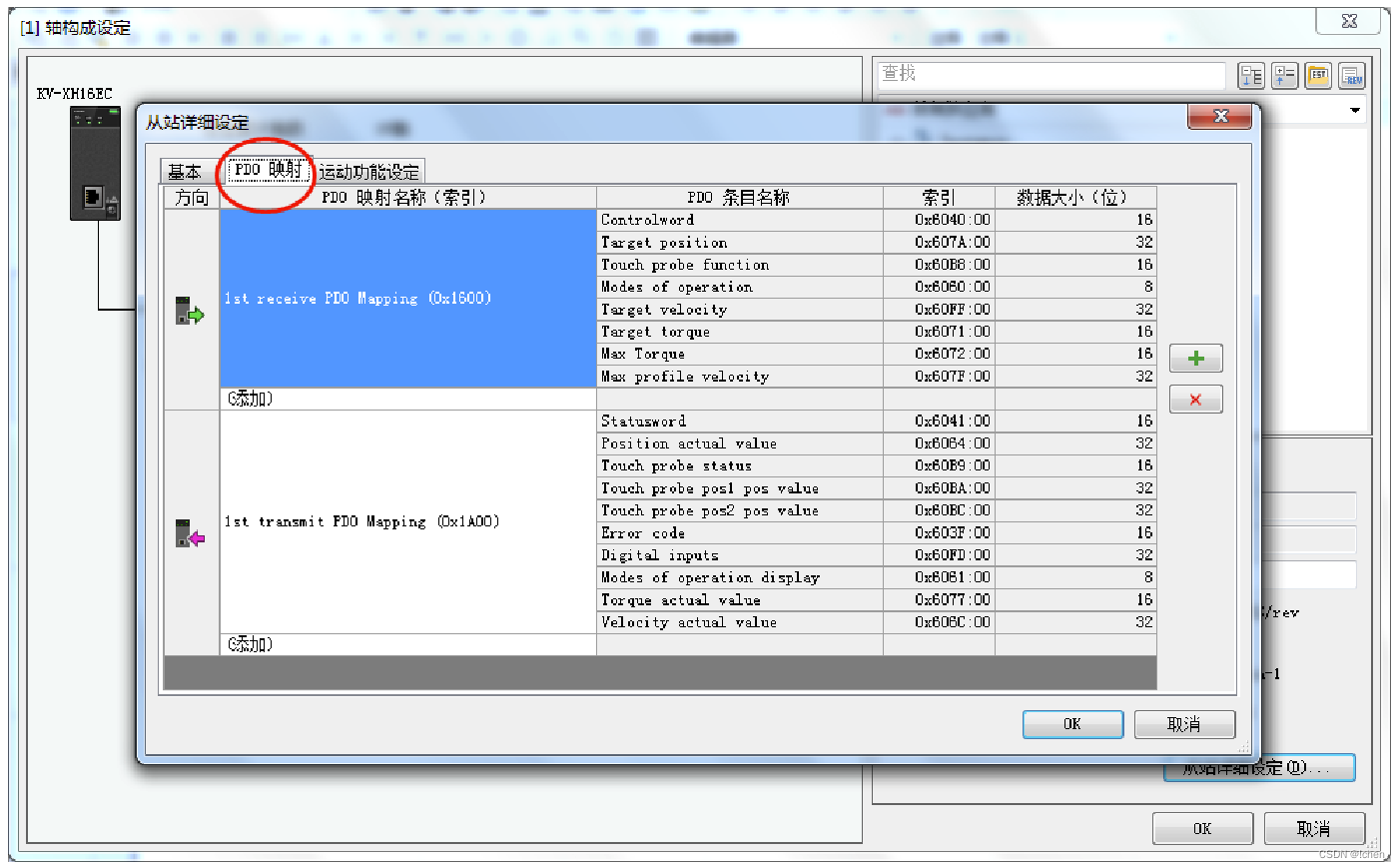
 双击或者拖拽,即可添加所需要的轴。选择相应的轴,可以设置该轴的“编码器分辨率”、
双击或者拖拽,即可添加所需要的轴。选择相应的轴,可以设置该轴的“编码器分辨率”、
“电机最高速度”、“电机最大转矩”等关键信息。从站详情设定中可以增加 PDO 设定等。
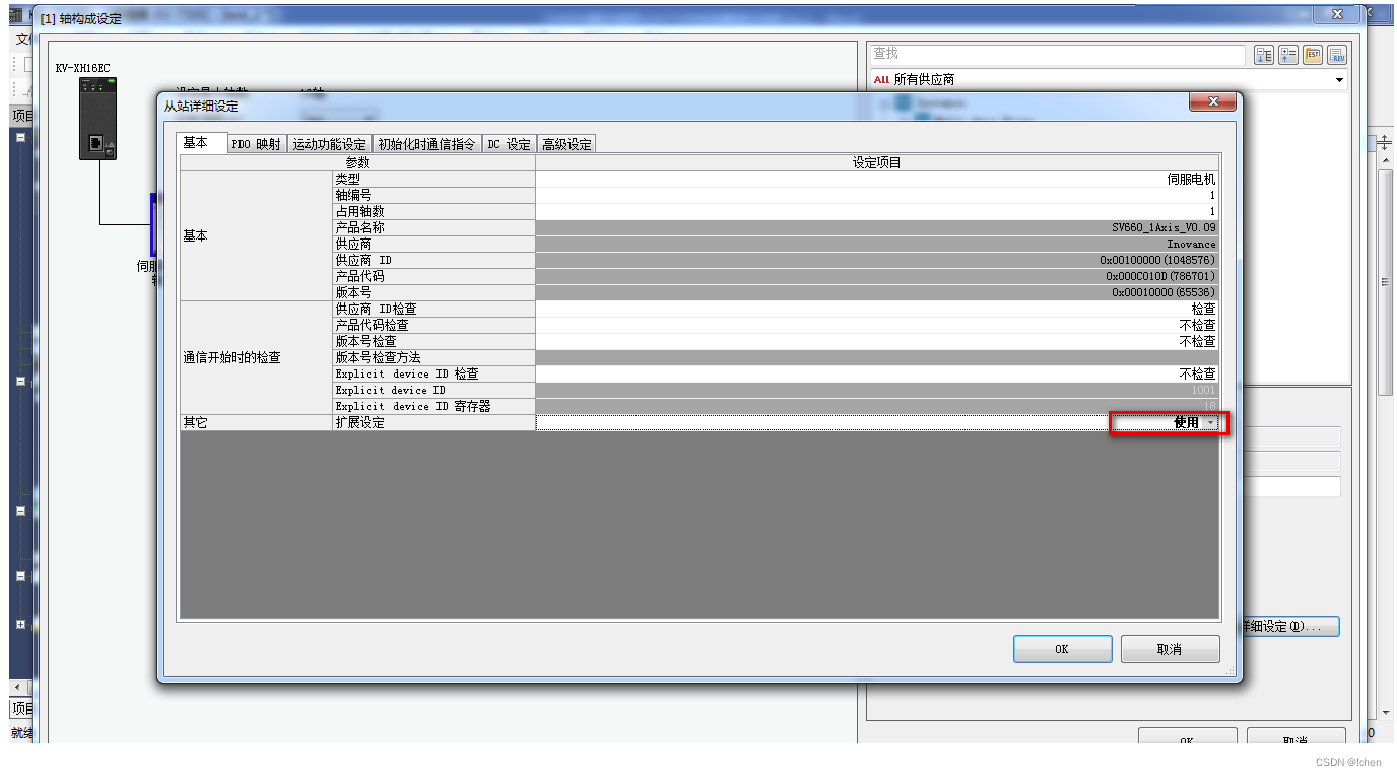
若需要进行扩展设定,需要将其他一栏的“扩展设定”设定为使用。
运动功能设定,可以双击或者通过单击下拉框(“小三角”)进行下拉选择所需要的 PDO
配置。也可以使用快捷方式“右键”-“自动分配”-“是”进行自动分配,所匹配的内容自动与
上述的 PDO 内容一一对应。手动匹配时需要注意不要遗漏 PDO 映射中的内容,否则在
点击“OK”进行确认的时候将会弹窗提示遗漏内容。“初始时通信指令”、“DC 设定”、“高
级设定”一般保持默认值。设置完成后,点击“OK”进行确认。
 2.3 轴控制设定
2.3 轴控制设定
轴控制设定可以从“工具”-“扩展单元设定”-“KV-XH 设定”-“轴控制设定”打开,也可以从
“项目”工作空间中“轴控制设定”打开。轴控制设定中包括“单位坐标转换”、“软件限位坐
标”、“轴错误”、“轴控制功能”、“位置控制通用”、“运转速度”、“JOG”、“原点复归”、
“绝对位置跟踪控制”、“同步型跟踪控制” 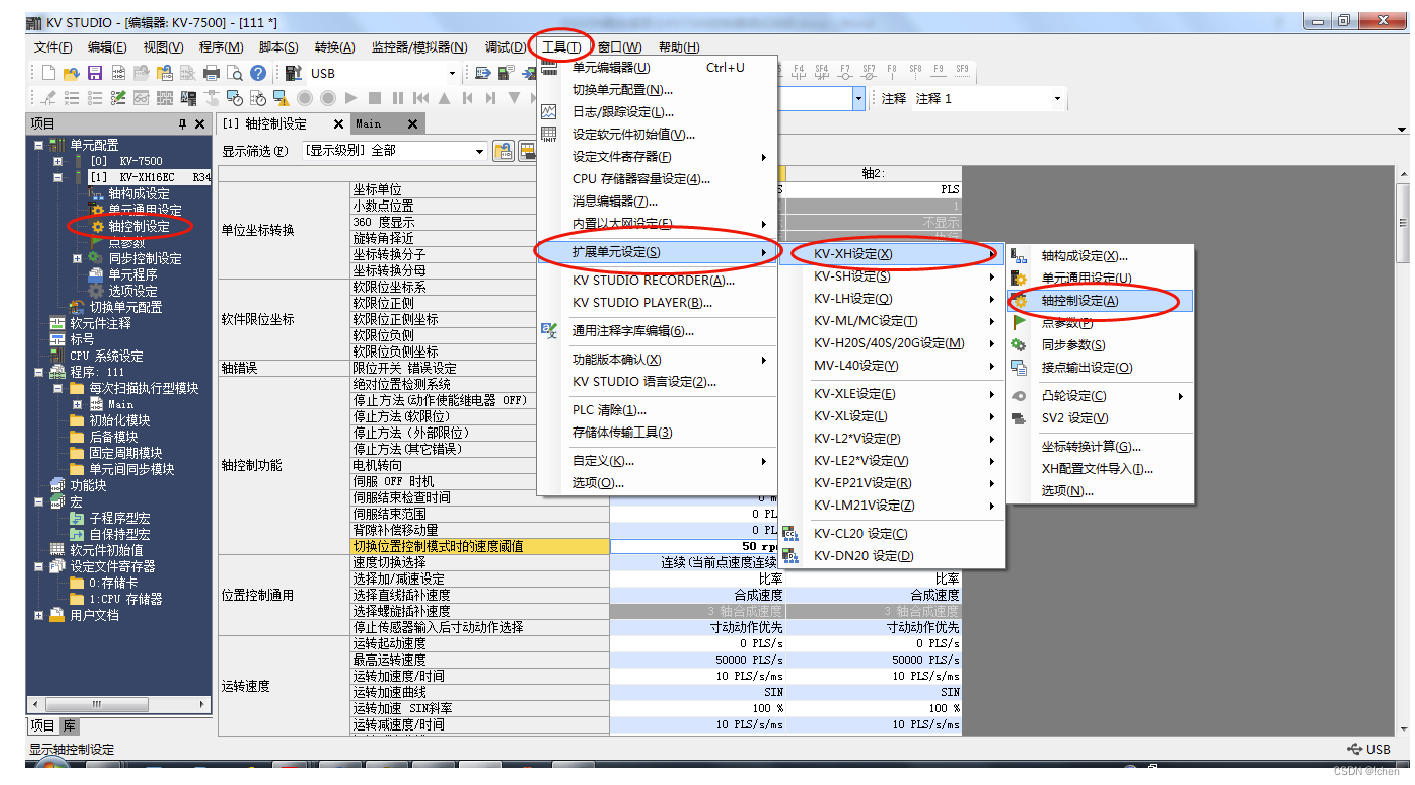
3. 运行设定
3.1 原点复归
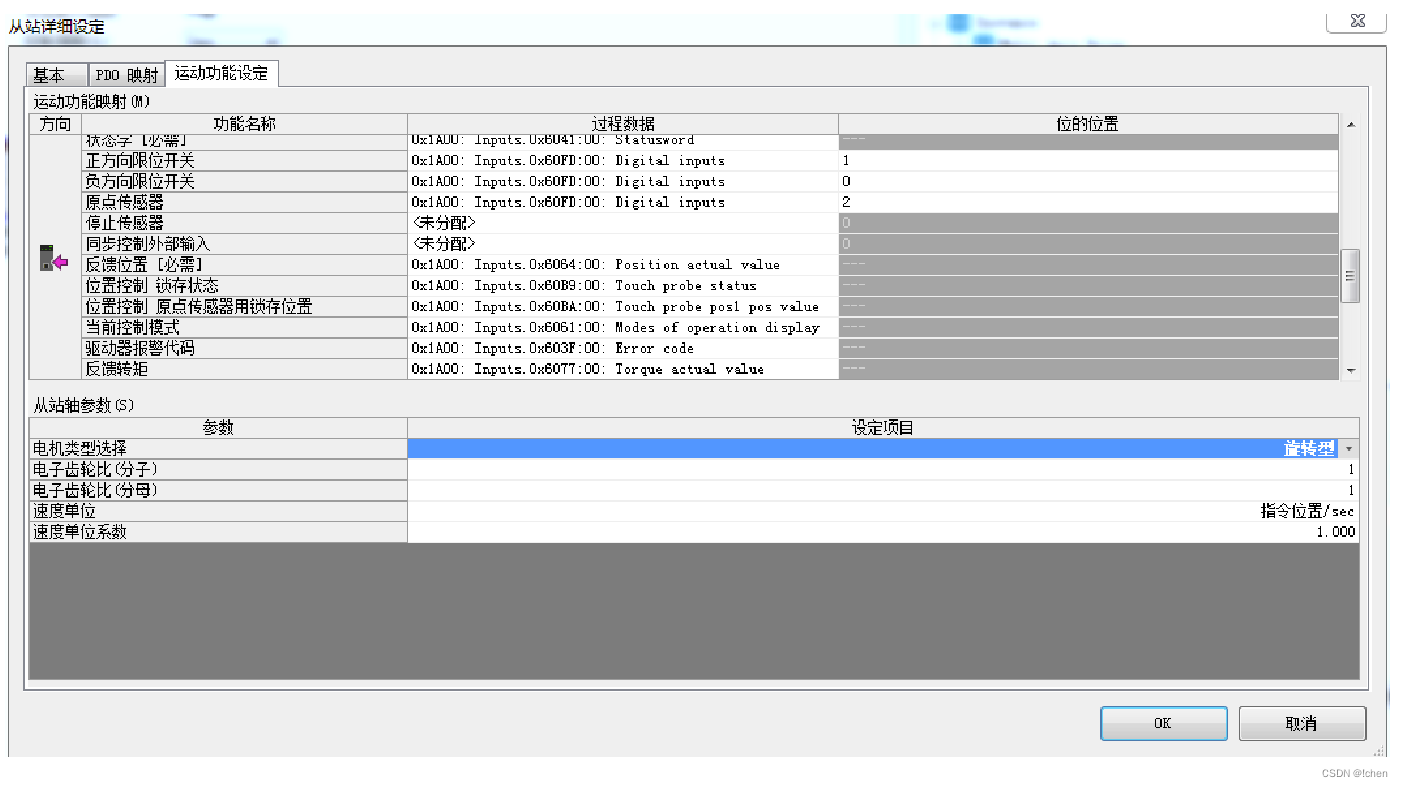
在进行原点复归之前,需要在“轴构成设定”中的“运动功能设定”中,关联“正方向
限位开关”、“负方向限位开关”、“原点传感器”等与 60FD 各 bit 位的对应关系。我司规
定的 60FD 的各位信息如下所示:
bit0、1、2 分别为负限位、正限位、原点开关,bit16—bit20 分别对应 DI1—DI5。
运动功能设定选择自动分配后,正负方向限位开关、原点传感器仍然需要手动与 60FD
的相应 bit 位进行匹配,可以采取下图所示对应关系进行分配;也可以将 bit16-bit20 分
配到正负限位开关、原点传感器上,但是这样设置之后驱动器侧就需要将对应的 DI 功
能配置成相应的正负限位开关、原点传感器等。
3.2 定位运行
定位运行前,需要设置正确的单位坐标转换。单位坐标转换默认为“PLS”,在此单位下,
坐标转换分子与分母将不能更改,假设伺服需要选择 N 圈,则上位机需要发送的指令个
数为“N*编码器一圈反馈脉冲数”。如果进行过坐标转换计算,单位坐标转换参数将自动
和坐标转换结果进行对应。
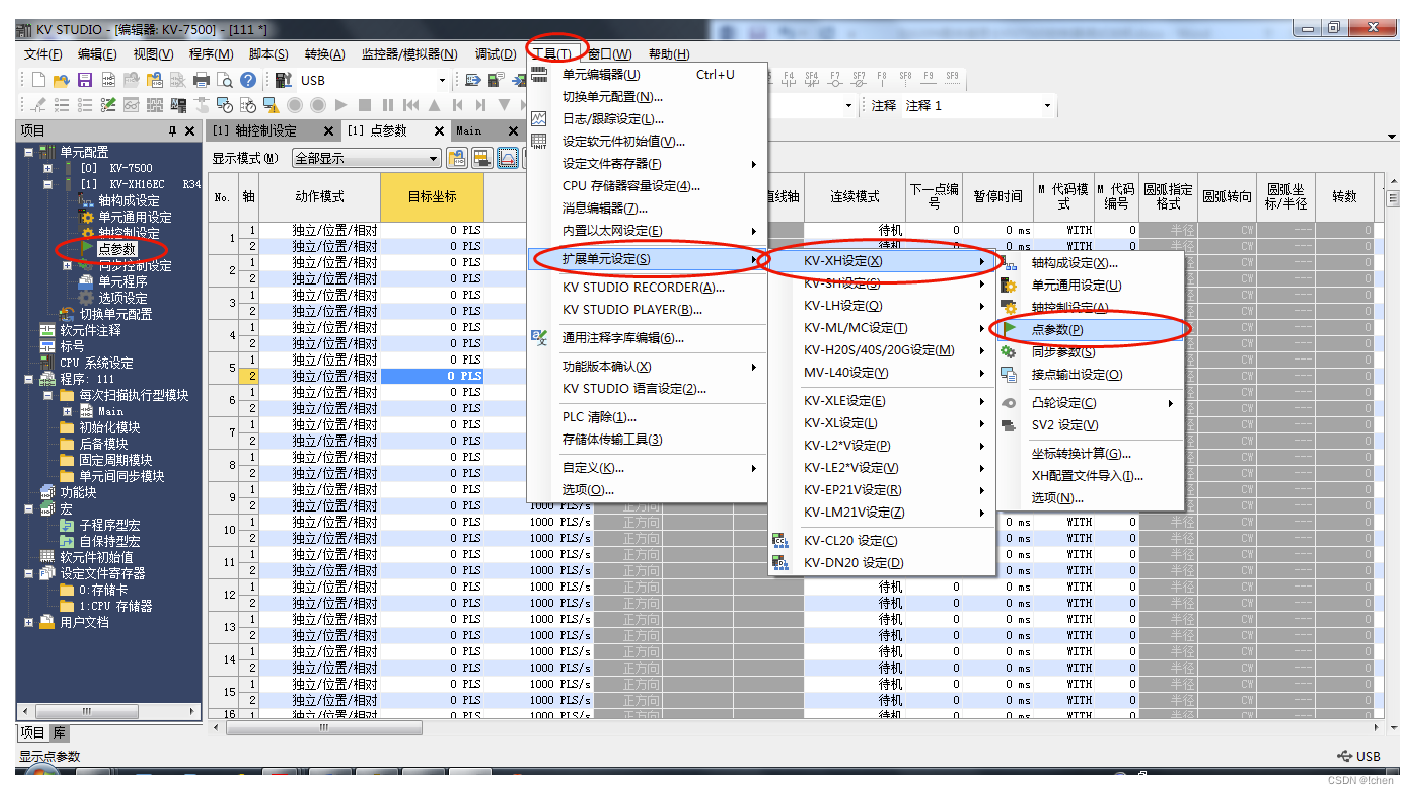
伺服运行轨迹从“点参数”中进行设定。可以根据实际要求设置每一段定位的目标坐标,
速度等,设置完成以后,即可以通过程序调用响应的点编号进行运行。
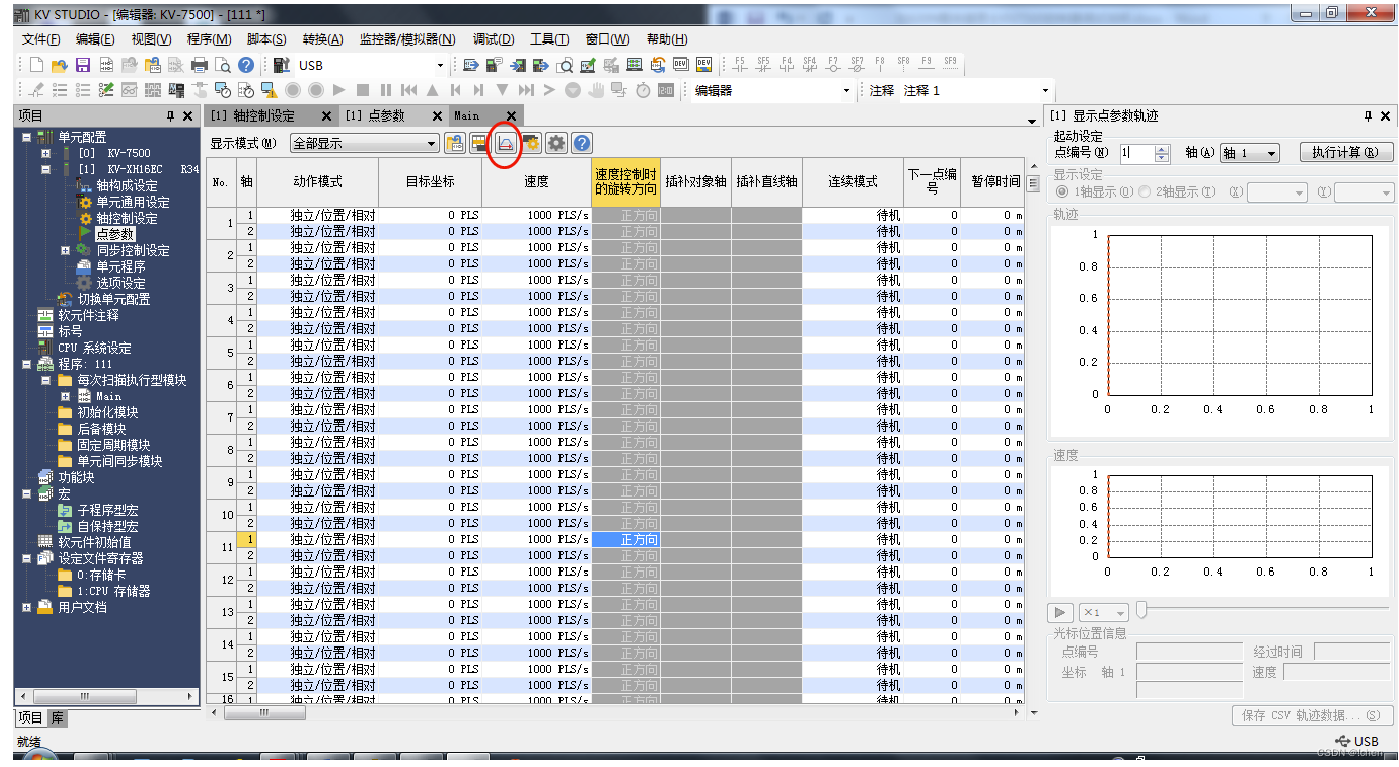
可以通过如下快捷方式预览点参数轨迹。
梯形图的编写可以使用常规方法。同时,基恩士提供了快速编写常用功能的方法。
1.鼠标左键拖住“点参数”窗口下拉,将窗口缩小放在合适位置。

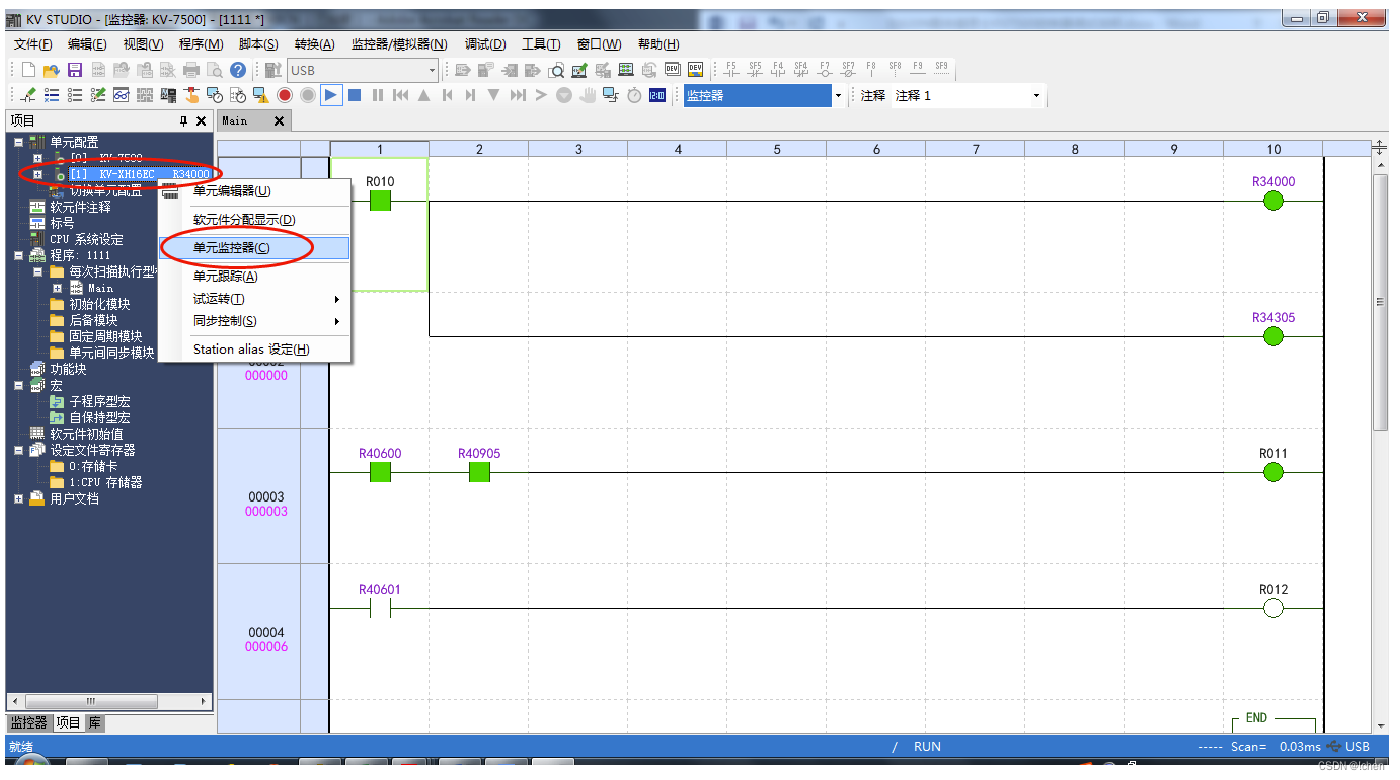
4. 单元监控器
单元监控器具有监控 KV-XH16EC 的运转状态或内部数据的功能。
在工作区单元构成中,选择要监控的单元,点击右键,从菜单选择“单元监控”。或者鼠
标左键双击,即可打开“单元监控器”。也可以在“main”程序的空白处单击右键,从弹出
的菜单中选择“单元监控器”。
5. 试运转
使用试运转功能后,无需编程梯形图程序,便可简便确认动作。在“单元监控器”右下角
可以找到“试运转功能”。 从定位控制、速度控制、转矩控制等选择控制模式,再选择试
运转的对象轴。控制模式为“速度控制模式”或“转矩控制模式”的状态下想要执行试运转
时会发生警告。执行试运转时,请将控制模式设为“位置控制模式”。下面以“试运转-定
位控制”进行介绍。

1) 动作使能、伺服ON:与梯形图程序的状态无关,“调试”可执行动作使能和伺服ON。正
常完成后,“动作就绪”、“伺服就绪”为绿色亮灯状态。为确保安全,请将CPU单元置于
PROG模式,并停止梯形图程序之后再执行操作。
a) 伺服就绪不呈绿色亮灯时,请确认以下几点。
• 是否发生轴错误
• 是否发生驱动器报警
• 伺服的主回路电源是否已连接
• 以太网电缆是否已连接
2) 轴错误/轴错误清除:发生轴错误时,可检查错误内容,执行错误清除操作。排除错误原
因后,单击“错误清除”按钮,执行错误清除操作。
3) JOG:单击“正方向”“负方向”按钮,可分别执行正/负方向 JOG 运转。相对于“轴控制通
用设定”→“JOG高速速度”设定,按照乘以一定比率后的速度进行运转。比率可在10~100%
之间按1%增量进行设定。
4) 寸动:单击“+方向”“-方向”按钮,可分别执行正/负方向寸动运转。按“轴控制通用设
定”→“JOG 起动速度”进行运转。按照“轴控制通用设定”→“JOG 寸动移动量”设定的移
动量进行运转。
5) 原点复归:单击“原点复归”按钮后,可执行原点复归。
6) 示教:单击“载入”按钮后,向指定的点编号的目标坐标的缓冲存储器存储当前的指令坐
标的值。仅在线编辑模式时可执行示教功能。示教的值同时反映到缓冲存储器和点参数。
7) 试运转:指定点编号,单击“开始”按钮后,可执行点定位。单击“停止”按钮后,则停止。
“1点运转”时,将执行指定的1个点的点定位。“连续运转”时,可执行最多连续10个点的
点定位。选中“循环”后,最下面一行的点定位完成后,会返回第1行的点定位反复执行。对于切换到下一个点的待机时间,可以在0.1~20.0秒的范围内设定。
8) 更改当前坐标:单击指令坐标后,弹出“更改当前坐标”对话框。输入想要更改的坐标,
单击“更改”按钮后,更改试运转中的轴的当前坐标,关闭“更改当前坐标”对话框。单击
“关闭”按钮后,不更改当前坐标,关闭“更改当前坐标”对话框。