AIR系列各型号开发板板载LED对应管脚及GPIO控制代码
AIR103:
rtos_bsp == "AIR103" then -- Air103开发板LED引脚编号
--return pin.PB26, pin.PB25, pin.PB24
return 42,41,40
AIR105:
rtos_bsp == "AIR105" then -- Air105开发板LED引脚编号
--return pin.PC3,pin.PD14, pin.PD15
return 35,62,63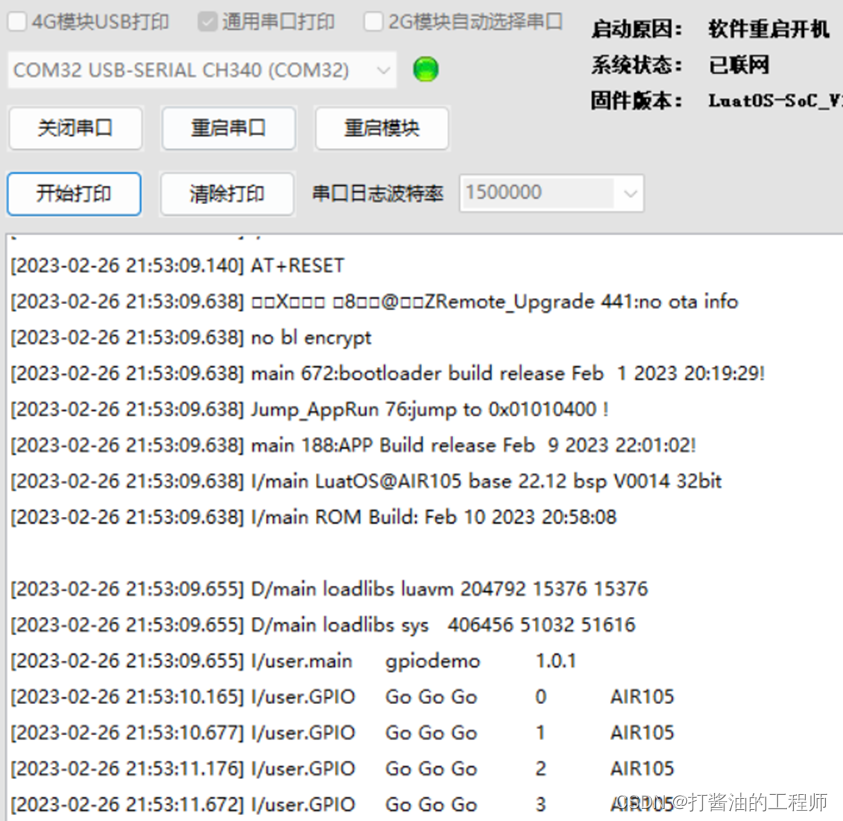
ESP32C3:
rtos_bsp == "ESP32C3" then -- ESP32C3开发板的引脚
return 12, 13, 255 -- 开发板上就2个灯
AIR780E:
rtos_bsp == "EC618" then -- Air780E开发板引脚
return 27, 255, 255 -- AIR780E开发板上就一个灯
ESP32S3:
rtos_bsp == "ESP32S3" then -- ESP32S3开发板引脚
return 10, 11, 255 -- ESP32S3开发板LED引脚编号
pinx() 函数
--根据不同开发板,给LED赋值不同的gpio引脚编号:
--【HaoSir2022】于2022年4月21日增加
local rtos_bsp = rtos.bsp()
function pinx() -- 根据不同开发板,给LED赋值不同的gpio引脚编号
if rtos_bsp == "AIR101" then -- Air101开发板LED引脚编号
return pin.PB08, pin.PB09, pin.PB10
elseif rtos_bsp == "AIR103" then -- Air103开发板LED引脚编号
--return pin.PB26, pin.PB25, pin.PB24
return 42,41,40
elseif rtos_bsp == "AIR105" then -- Air105开发板LED引脚编号
--return pin.PC3,pin.PD14, pin.PD15
return 35,62,63
elseif rtos_bsp == "ESP32C3" then -- ESP32C3开发板的引脚
return 12, 13, 255 -- 开发板上就2个灯
elseif rtos_bsp == "EC618" then -- Air780E开发板引脚
return 27, 255, 255 -- AIR780E开发板上就一个灯
elseif rtos_bsp == "ESP32S3" then -- ESP32S3开发板引脚
return 10, 11, 255 -- ESP32S3开发板LED引脚编号
else
log.info("main", "define led pin in main.lua")
return 0, 0, 0
end
endLED引脚初始化
--LED引脚判断赋值结束
local P1,P2,P3=pinx()--赋值开发板LED引脚编号
local LEDA= gpio.setup(P1, 0, gpio.PULLUP)
local LEDB= gpio.setup(P2, 0, gpio.PULLUP)
local LEDC= gpio.setup(P3, 0, gpio.PULLUP)流水灯代码:
--开始流水灯
local count = 0
while 1 do
--流水灯程序
sys.wait(500) --点亮时间
-- 轮流点灯
LEDA(count % 3 == 0 and 1 or 0)
if P2 and P2 ~=255 then
LEDB(count % 3 == 1 and 1 or 0)
end
if P3 and P3 ~= 255 then
LEDC(count % 3 == 2 and 1 or 0)
end
log.info("GPIO", "Go Go Go", count, rtos.bsp())
--log.info("LuatOS:", "https://wiki.luatos.com")
count = count + 1
endgpio - GPIO操作函数
已适配 Air101/Air103 Air105 ESP32C3 Air780
备注
本页文档由这个文件自动生成。如有错误,请提交issue或帮忙修改后pr,谢谢!
小技巧
本库有专属demo,点此链接查看gpio的demo例子
小技巧
本库还有视频教程,点此链接查看
常量
| 常量 | 类型 | 解释 |
| gpio.LOW | number | 低电平 |
| gpio.HIGH | number | 高电平 |
| gpio.OUTPUT | number | 输出模式 |
| gpio.INPUT | number | 输入模式 |
| gpio.IRQ | number | 中断模式 |
| gpio.PULLUP | number | 上拉 |
| gpio.PULLDOWN | number | 下拉 |
| gpio.RISING | number | 上升沿触发 |
| gpio.FALLING | number | 下降沿触发 |
| gpio.BOTH | number | 双向触发,部分设备支持 |
| gpio.HIGH_IRQ | number | 高电平触发,部分设备支持 |
| gpio.LOW_IRQ | number | 低电平触发,部分设备支持 |
gpio.setup(pin, mode, pull, irq)
设置管脚功能
参数
| 传入值类型 | 解释 |
| int | pin gpio编号,必须是数值 |
| any | mode 输入输出模式: |
| int | pull 上拉下列模式, 可以是gpio.PULLUP 或 gpio.PULLDOWN, 需要根据实际硬件选用 |
| int | irq 默认gpio.BOTH。中断触发模式 |
返回值
| 返回值类型 | 解释 |
| any | 输出模式返回设置电平的闭包, 输入模式和中断模式返回获取电平的闭包 |
例子
-- 设置gpio17为输入
gpio.setup(17, nil)
-- 设置gpio17为输出
gpio.setup(17, 0)
-- 设置gpio27为中断
gpio.setup(27, function(val) print("IRQ_27",val) end, gpio.PULLUP)
gpio.set(pin, value)
设置管脚电平
参数
| 传入值类型 | 解释 |
| int | pin GPIO编号,必须是数值 |
| int | value 电平, 可以是 高电平gpio.HIGH, 低电平gpio.LOW, 或者直接写数值1或0 |
返回值
| 返回值类型 | 解释 |
| nil | 无返回值 |
例子
-- 设置gpio17为低电平
gpio.set(17, 0)
gpio.get(pin)
获取管脚电平
参数
| 传入值类型 | 解释 |
| int | pin GPIO编号,必须是数值 |
返回值
| 返回值类型 | 解释 |
| value | 电平, 高电平gpio.HIGH, 低电平gpio.LOW, 对应数值1和0 |
例子
-- 获取gpio17的当前电平
gpio.get(17)
gpio.close(pin)
关闭管脚功能(高阻输入态),关掉中断
参数
| 传入值类型 | 解释 |
| int | pin GPIO编号,必须是数值 |
返回值
| 返回值类型 | 解释 |
| nil | 无返回值,总是执行成功 |
例子
-- 关闭gpio17
gpio.close(17)
gpio.setDefaultPull(val)
设置GPIO脚的默认上拉/下拉设置, 默认是平台自定义(一般为开漏).
参数
| 传入值类型 | 解释 |
| int | val 0平台自定义,1上拉, 2下拉 |
返回值
| 返回值类型 | 解释 |
| boolean | 传值正确返回true,否则返回false |
例子
-- 设置gpio.setup的pull默认值为上拉
gpio.setDefaultPull(1)
gpio.toggle(pin)
变换GPIO脚输出电平,仅输出模式可用
参数
| 传入值类型 | 解释 |
| int | 管脚的GPIO号 |
返回值
| 返回值类型 | 解释 |
| nil | 无返回值 |
例子
-- 本API于 2022.05.17 添加
-- 假设GPIO16上有LED, 每500ms切换一次开关
gpio.setup(16, 0)
sys.timerLoopStart(function()
gpio.toggle(16)
end, 500)
gpio.pulse(pin,level,len,delay)
在同一个GPIO输出一组脉冲, 注意, len的单位是bit, 高位在前.
参数
| 传入值类型 | 解释 |
| int | gpio号 |
| int/string | 数值或者字符串. |
| int | len 长度 单位是bit, 高位在前. |
| int | delay 延迟,当前无固定时间单位 |
返回值
| 返回值类型 | 解释 |
| nil | 无返回值 |
例子
-- 通过PB06脚输出输出8个电平变化.
gpio.pulse(pin.PB06,0xA9, 8, 0)
gpio.debounce(pin, ms, mode)
防抖设置, 根据硬件ticks进行防抖
参数
| 传入值类型 | 解释 |
| int | gpio号, 0~127, 与硬件相关 |
| int | 防抖时长,单位毫秒, 最大 65555 ms, 设置为0则关闭 |
| int | 模式, 0冷却模式, 1延时模式. 默认是0 |
返回值
| 返回值类型 | 解释 |
| nil | 无返回值 |
例子
-- 消抖模式, 当前支持2种, 2022.12.16开始支持mode=1
-- 0 触发中断后,马上上报一次, 然后冷却N个毫秒后,重新接受中断
-- 1 触发中断后,延迟N个毫秒,期间没有新中断且电平没有变化,上报一次
-- 开启防抖, 模式0-冷却, 中断后马上上报, 但100ms内只上报一次
gpio.debounce(7, 100) -- 若芯片支持pin库, 可用pin.PA7代替数字7
-- 开启防抖, 模式1-延时, 中断后等待100ms,期间若保持该电平了,时间到之后上报一次
-- 对应的,如果输入的是一个 50hz的方波,那么不会触发任何上报
gpio.debounce(7, 100, 1)
-- 关闭防抖,时间设置为0就关闭
gpio.debounce(7, 0)