目录
软件定时器介绍
FreeRTOS软件定时器特点
软件定时器的命令队列
软件定时器的相关配置
单次定时器和周期定时器
软件定时器结构体成员
FreeRTOS软件定时器相关API函数
实验源码
软件定时器介绍
定时器描述:从指定的时刻开始,经过一个指定时间,然后触发一个超时事件,用户可自定义定时器的周期。
硬件定时器描述:芯片本身自带的定时器模块,硬件定时器的精度一般很高,每次在定时时间到达之后就会自动触发一个中断,用户在中断服务函数中处理信息。
软件定时器:是指具有定时功能的软件,可设置定时周期,当指定时间到达后要调用回调函数(也称超时函数),用户在回调函数中处理信息。
软件定时器优点:
1.硬件定时器数量有限,而软件定时器理论上只需有足够内存,就可以创建多个。
2.使用简单、成本低
软件定时器缺点:
1.软件定时器相对硬件定时器来说,精度没有那么高(因为它以系统时钟为基准,系统时钟中断优先级又是最低,容易被打断)。对于需要高精度要求的场合,不建议使用软件定时器。
FreeRTOS软件定时器特点
可裁剪:软件定时器是可裁剪可配置的功能,如果要使能软件定时器,需将configUSE_TIMERS配置项配置成 1
单次和周期:软件定时器支持设置成:单次定时器或周期定时器
注意:软件定时器的超时回调函数是由软件定时器服务任务调用的,软件定时器的超时回调函数本身不是任务,因此不能在该回调函数中使用可能会导致任务阻塞的API函数。
软件定时器服务任务作用:
1.负责软件定时器超时的逻辑判断
2.调用超时软件定时器的超时回调函数
3.处理软件定时器命令队列
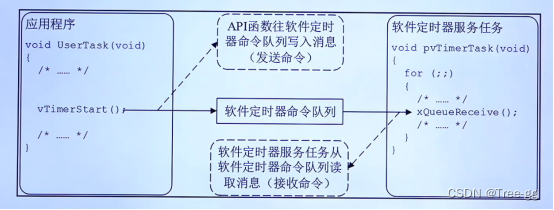
软件定时器的命令队列
FreeRTOS提供了许多软件定时器相关的API函数,这些API函数大多都是往定时器的队列中写入消息(发送命令) ,这个队列叫做软件定时器命令队列,是提供给FreeRTOS中的软件定时器使用的,用户是不能直接访问的。
软件定时器的相关配置
当FreeRTOS的配置项configUSE_TIMERS设置为1,在启动任务调度器时,会自动创建软件定时器的服务/守护任务prvTimerTask();
软件定时器服务任务的优先级为configTIMER_TASK_PRIORITY =31;
定时器的命令队列长度为 configTIMER_QUEUE_LENGTH =5 ;
注意:软件定时器的超时回调函数是在软件定时器服务任务中被调用的,服务任务不是专为某个定时器服务的,它还要处理其他定时器。所以,定时器的回调函数不要影响其他定时器。
1.回调函数要尽快实行,不能进入阻塞状态,即不能调用那些会阻塞任务的API 函数,如:vTaskDelay();
2.访问队列或者信号量的非零阻塞时间的API函数也不能调用。
软件定时器的状态
软件定时器共有两种状态
休眠态:软件定时器可以通过其句柄被引用,但因为没有运行,所以其定时超时回调函数不会被执行。
运行态:运行态的定时器,当指定时间到达之后,它的超时回调函数会被调用。
注意:新创建的软件定时器处于休眠状态,也就是未运行的!发送命令队列软件定时器从休眠态转变为运行态
单次定时器和周期定时器
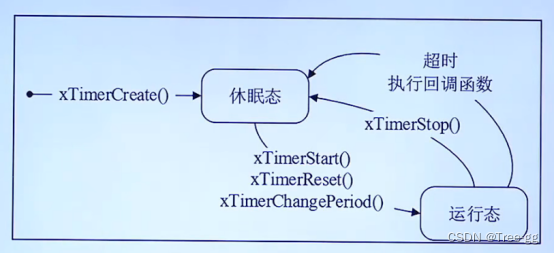
单次定时器:单次定时器的一旦定时超时,只会执行一次其软件定时器超时回调函数,不会自动重新开启定时,不过可以被手动重新开启。
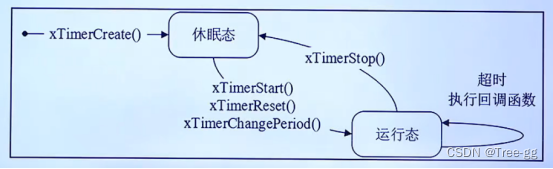
周期定时器:周期定时器的一旦启动以后就会在执行完回调函数以后自动的重新启动,从而周期地执行其软件定时器回调函数。
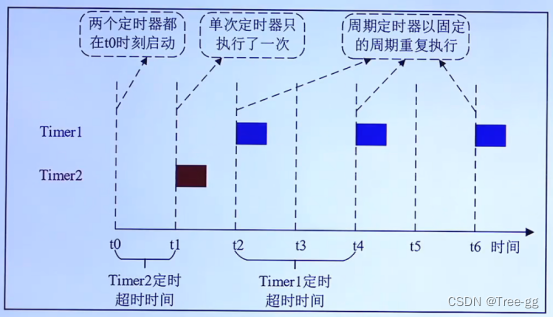
Timer1:周期定时器,定时超时时间为2个单位时间,开启后,一直以2个时间单位间隔重复执行;
Timer2:单次定时器,定时超时时间为1个单位时间,开启后,则在第一个超时后就不在执行了。
单次定时器状态转换图
周期定时器状态转换图
软件定时器结构体成员
typedef struc
{
tconst char* pcTimerName /* 软件定时器名字*/
Listltem_t xTimerListltem /* 软件定时器列表项*/
TickType_t xTimerPeriodInTicks;/*软件定时器的周期*/
void * pvTimerID /*软件定时器的ID*/
TimerCallbackFunction_t pxCallbackFunction;/*软件定时器的回调函数*/
#if (configUSE_TRACE_FACILITY ==1)
UBaseType_t uxTimerNumber /*软件定时器的编号,调试用*/
#endif
uint8_t ucStatus; /*软件定时器的状态*/
}xTIMER;FreeRTOS软件定时器相关API函数
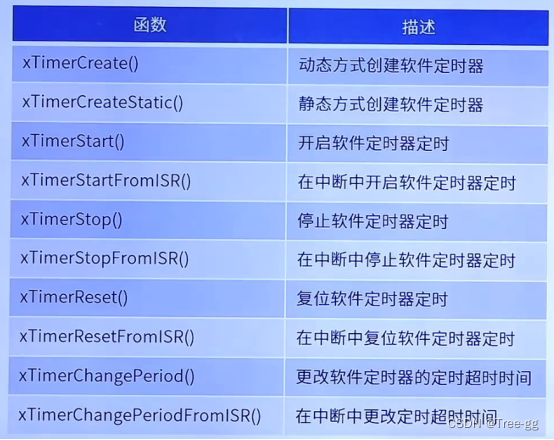
创建软件定时器API函数
TimerHandle_t xTimerCreate( const char* constpcTimerName,
const TickType_t xTimerPeriodInTicks,
const UBaseType_t constuxAutoReload,
void* pvTimerlD,
TimerCallbackFunction_t pxCallbackFunction );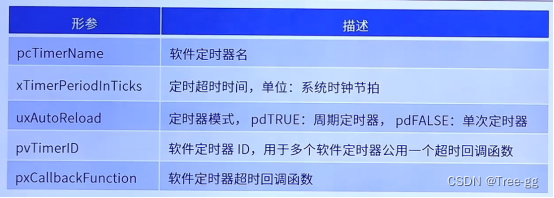
开启软件定时器API函数
BaseType_t xTimerStart(TimerHandle_txTimer,const TickType_t xTicksToWait);

停止软件定时器API函数
BaseType_t xTimerStop( TimerHandle_txTimer,const TickType_txTicksToWait);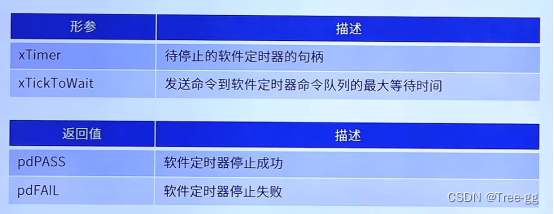
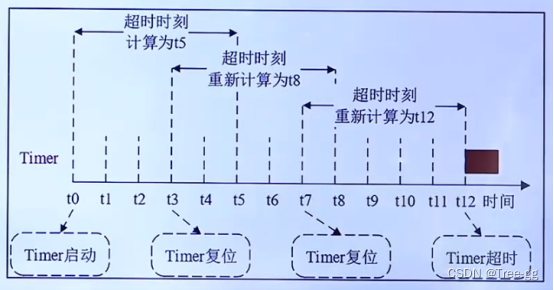
复位软件定时器API函数
该功能将使软件定时器的重新开启定时,复位后的软件定时器以复位时的时刻作为开启时刻重新定时
BaseType_t xTimerReset( TimerHandle_txTimer,const TickType_txTicksToWait);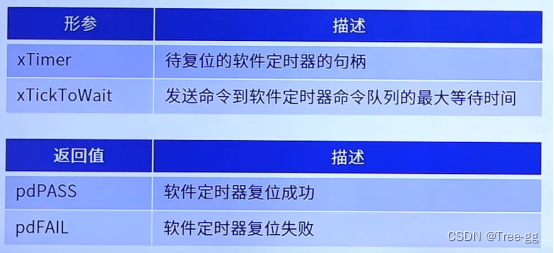
更改软件定时器超时时间API函数
BaseType_t xTimerChangePeriod(TimerHandle_txTimer,
const TickType_txNewPeriod,
const TickType_txTicksToWait);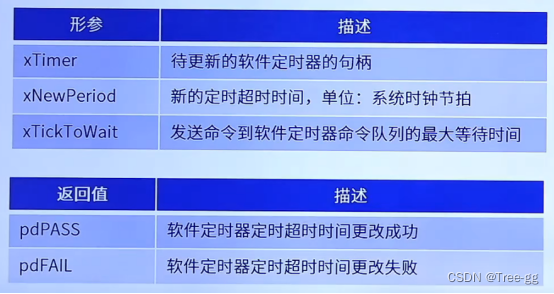
实验源码
设计两个任务:start_task、task1
start_task:用来创建task1任务,并创建两个定时器(单次和周期)
task1:用于按键扫描,并对软件定时器进行开启、停止操作
/**
******************************************************************************
* @file : user_mian.h
* @brief : V1.00
******************************************************************************
* @attention
*
******************************************************************************
*/
/* Include 包含---------------------------------------------------------------*/
#include "stm32f10x.h"
#include <stdbool.h>
#include "user_gpio.h"
#include "user_delay.h"
#include "user_rcc_config.h"
#include "user_uart.h"
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
#include "user_key.h"
#include "queue.h"
#include "event_groups.h"
/* Typedef 类型----------------------------------------------------------------*/
/* Define 定义----------------------------------------------------------------*/
/* Macro 宏------------------------------------------------------------------*/
/* Variables 变量--------------------------------------------------------------*/
/* Constants 常量--------------------------------------------------------------*/
/* Function 函数--------------------------------------------------------------*/
void Timer1_Callback(TimerHandle_t pxTimer);
void Timer2_Callback(TimerHandle_t pxTimer);
TimerHandle_t Timer1 = 0;/*单次定时器*/
TimerHandle_t Timer2 = 0;/*周期定时器*/
uint32_t Timer1_;
uint32_t Timer2_;
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);
//任务优先级
#define TASK1_PRIO 4
//任务堆栈大小
#define TASK1_STK_SIZE 100
//任务句柄
TaskHandle_t TASK1_Handler;
//任务函数
void task1(void *pvParameters);
int main(void)
{
/*配置系统中断分组为4位抢占*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
/*延时函数初始化*/
delay_init();
/*RCC配置*/
Rcc_config();
/*GPIO初始化*/
Gpio_Init();
/*USART1初始化*/
Uart1_Init(9600);
/*创建开始任务*/
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
vTaskStartScheduler(); //开启任务调度
}
/*!
\brief 开始任务函数
\param[in] 传递形参,创建任务时用户自己传入
\param[out] none
\retval none
*/
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
/*创建单次软件定时器*/
/*名字,延时时间,pdFALSE单次,编号1,回调函数*/
Timer1 = xTimerCreate("Tiner1",1000,pdFALSE,(void *)1,Timer1_Callback);
/*创建周期软件定时器*/
/*名字,延时时间,pdTRUE周期,编号2,回调函数*/
Timer2 = xTimerCreate("Tiner2",1000,pdTRUE,(void *)2,Timer2_Callback);
//创建任务
xTaskCreate((TaskFunction_t )task1,
(const char* )"task1",
(uint16_t )TASK1_STK_SIZE,
(void* )NULL,
(UBaseType_t )TASK1_PRIO,
(TaskHandle_t* )&TASK1_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
/*!
\brief 任务1扫描控制软件定时器
\param[in] 传递形参,创建任务时用户自己传入
\param[out] none
\retval none
*/
void task1(void *pvParameters)
{
uint8_t key = 0;
while(1)
{
key = Key_Scan(0);
if(key == KEY0_PRES)
{
/*开启定时器*/
xTimerStart(Timer1,portMAX_DELAY);
xTimerStart(Timer2,portMAX_DELAY);
taskENTER_CRITICAL(); //进入临界区
printf("开启2个定时器\r\n\r\n");
taskEXIT_CRITICAL(); //退出临界区
}else if(key == KEY1_PRES)
{
/*关闭定时器*/
xTimerStop(Timer1,portMAX_DELAY);
xTimerStop(Timer2,portMAX_DELAY);
Timer1_ = 0;
Timer2_ = 0;
taskENTER_CRITICAL(); //进入临界区
printf("停止2个定时器\r\n\r\n");
taskEXIT_CRITICAL(); //退出临界区
}
vTaskDelay(10);
}
}
/*!
\brief 单次定时器回调函数
\param[in] none
\param[out] none
\retval none
*/
void Timer1_Callback(TimerHandle_t pxTimer)
{
taskENTER_CRITICAL(); //进入临界区
printf("单次定时器运行次数:%d次数\r\n\r\n",++Timer1_);
taskEXIT_CRITICAL(); //退出临界区
}
/*!
\brief 周期定时器回调函数
\param[in] none
\param[out] none
\retval none
*/
void Timer2_Callback(TimerHandle_t pxTimer)
{
taskENTER_CRITICAL(); //进入临界区
printf("周期定时器运行次数:%d次数\r\n\r\n",++Timer2_);
taskEXIT_CRITICAL(); //退出临界区
}
/************************************************************** END OF FILE ****/