环境
本实验使用环境为:
Win10平台下的Modelsim SE-64 2019.2
代码
dut代码:
module dut(clk,
rst_n,
rxd,
rx_dv,
txd,
tx_en);
input clk;
input rst_n;
input[7:0] rxd;
input rx_dv;
output [7:0] txd;
output tx_en;
reg[7:0] txd;
reg tx_en;
always @(posedge clk) begin
if(!rst_n) begin
txd <= 8'b0;
tx_en <= 1'b0;
end
else begin
txd <= rxd;
tx_en <= rx_dv;
end
end
endmodule
其功能很简单,即将接受到的数据原封不动发送出去。
driver代码:
`ifndef MY_DRIVER__SV
`define MY_DRIVER__SV
class my_driver extends uvm_driver;
function new(string name = "my_driver", uvm_component parent = null);
super.new(name, parent);
endfunction
extern virtual task main_phase(uvm_phase phase);
endclass
task my_driver::main_phase(uvm_phase phase);
top_tb.rxd <= 8'b0;
top_tb.rx_dv <= 1'b0;
while(!top_tb.rst_n)
@(posedge top_tb.clk);
for(int i = 0; i < 256; i++) // 开始循环256次
begin
@(posedge top_tb.clk);
top_tb.rxd <= $urandom_range(0, 255); // 随机向rxd 上发送一个0~255的随机数
top_tb.rx_dv <= 1'b1; // 有效位,置1
`uvm_info("my_driver", "data is drived", UVM_LOW)
end
@(posedge top_tb.clk);
top_tb.rx_dv <= 1'b0; // 完成后有效位拉低
endtask
`endif
定义一个driver类,它派生自uvm_driver。driver的主要功能在main_phase task中实现,主要功能为向rxd管脚上发送随机数。`uvm_info(“my_driver”, “data is drived”, UVM_LOW)为打印信息的宏。
top_tb.sv:
`timescale 1ns/1ns
`include "uvm_macros.svh" // 包含宏定义
import uvm_pkg::*; // 导入UVM库
`include "my_driver.sv"
module top_tb;
reg clk;
reg rst_n;
reg[7:0] rxd;
reg rx_dv;
wire[7:0] txd;
wire tx_en;
dut my_dut(.clk(clk),
.rst_n(rst_n),
.rxd(rxd),
.rx_dv(rx_dv),
.txd(txd),
.tx_en(tx_en));
initial begin // 定义drv 并进行实例化
my_driver drv;
drv = new("drv", null);
drv.main_phase(null); // 调用drive的 main_phase
$finish();
end
initial begin
clk = 0;
forever begin
#1 clk = ~clk;
end
end
initial begin
rst_n = 1'b0;
#10;
rst_n = 1'b1;
end
endmodule
脚本
编写sim0.do脚本
cd C:/Users/xxx/Desktop/uvm
vlib work
set UVM_HOME D:/modelsim/verilog_src/uvm-1.1d
set WORK_HOME C:/Users/xxx/Desktop/uvm
vlog +incdir+$UVM_HOME/src -L mtiAvm -L mtiOvm -L mtiUvm -L mtiUPF $UVM_HOME/src/uvm_pkg.sv $WORK_HOME/dut.sv top_tb.sv
vsim -c -sv_lib D:/modelsim/uvm-1.1d/win64/uvm_dpi work.top_tb
- 第一行,通过cd切换到源文件所在目录
- 第二行,vlib命令用于建立一个新的工作库。
在本例子中,vlib work在当前目录建立work工作区文件夹,运行后会在当前目录下找到work文件夹。 - 设置UVM库的路径和工作文件夹。如下图所示。
- vlog命令用于编译verilog代码,具体用法可参见博客
- vsim表示运行仿真,-sv_lib 对应uvm的一个路径。其中参数“-c”表示进入命令行模式,如果没有该参数,则表示进行GUI模式。
最后,编写run.bat文件如下
vsim -do sim0.do
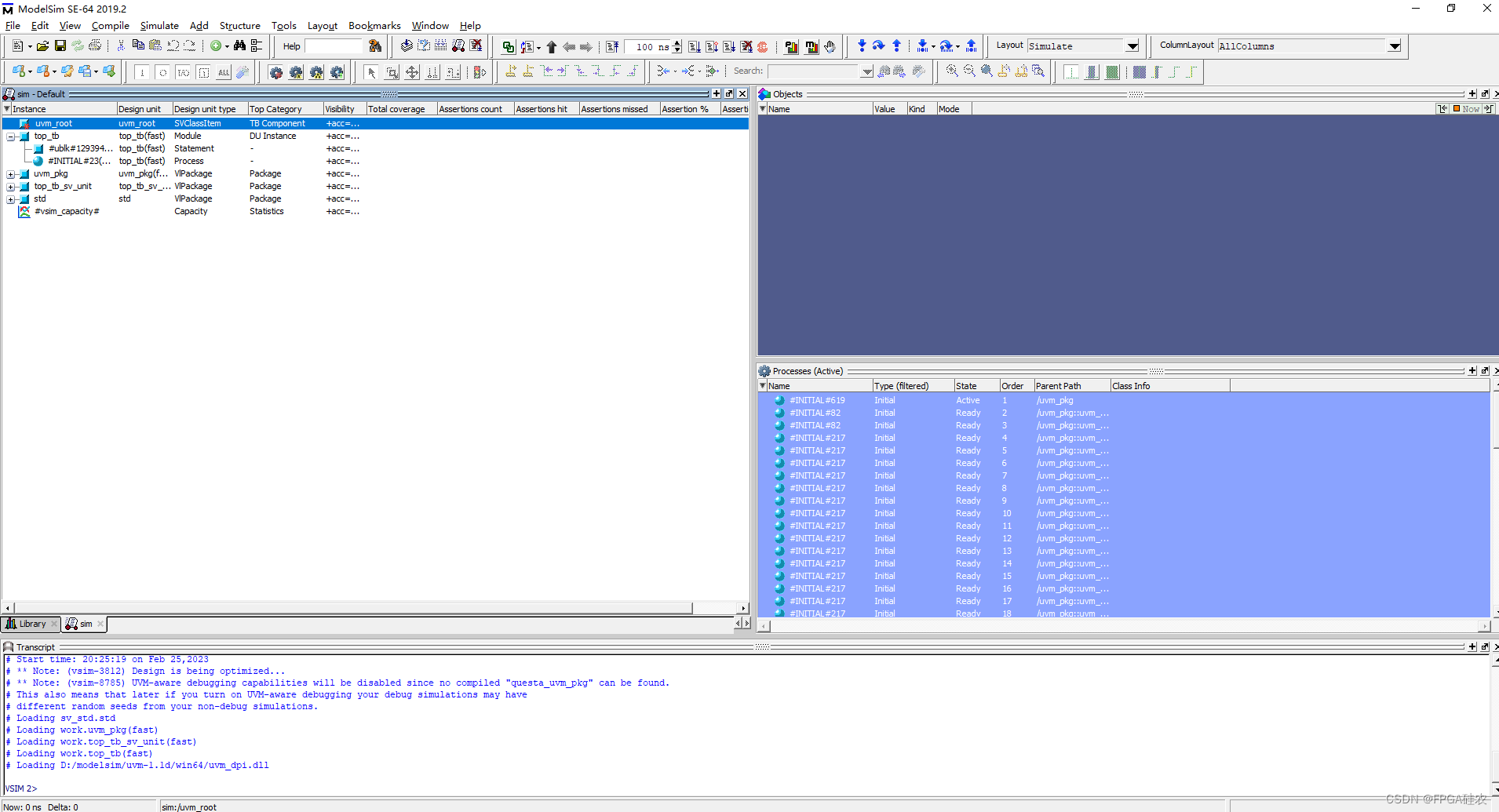
运行
双击run.bat,跳出如下界面
执行命令run 100,得到如下输出
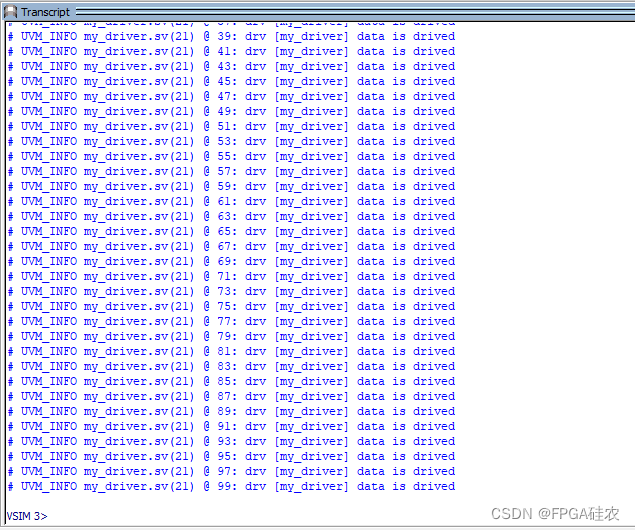
表明driver正常工作。
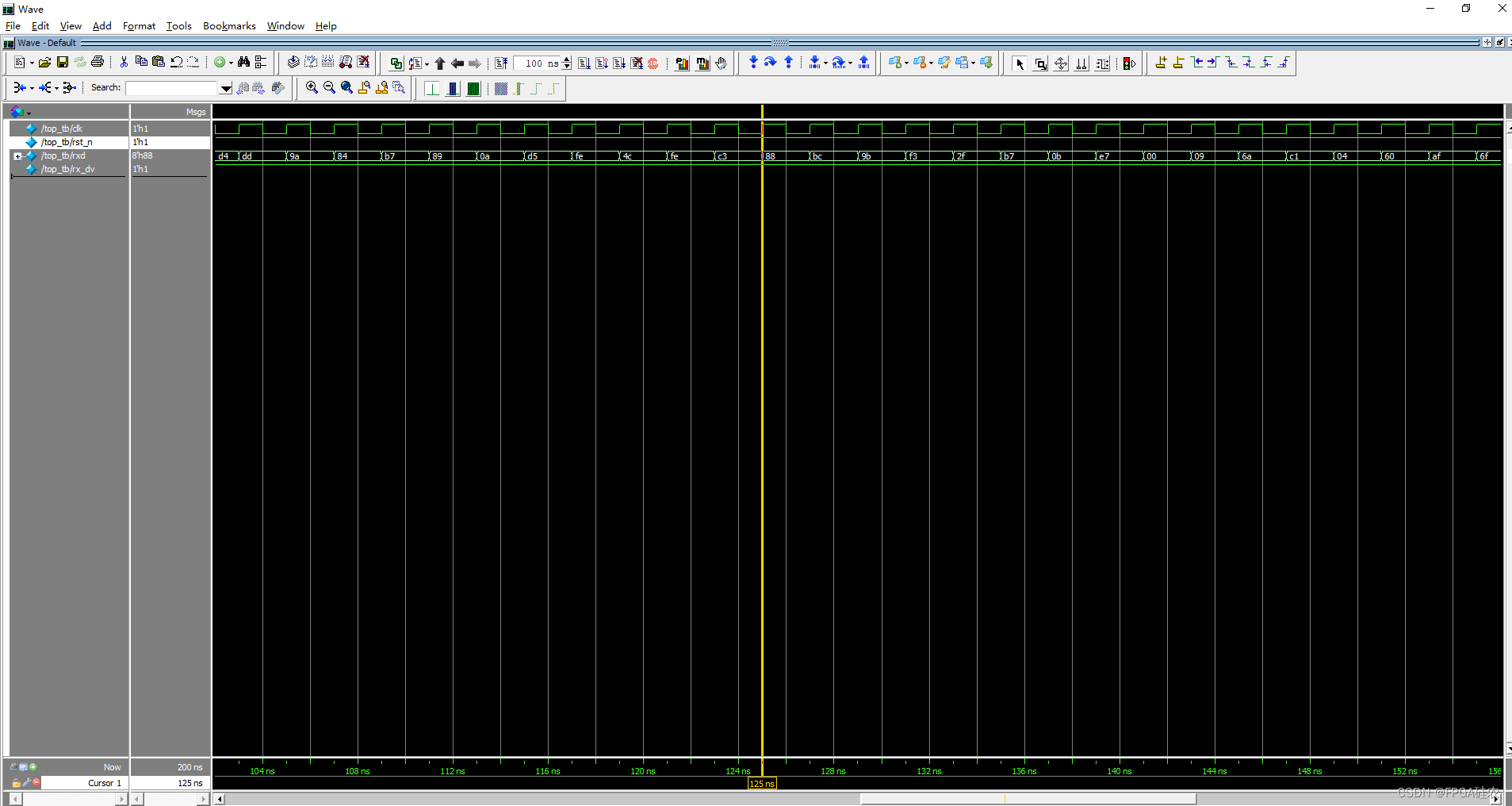
执行add wave *,可以观察到如下所示的波形:

![[JVM]JVM内存模型,类加载过程,双亲委派模型](https://img-blog.csdnimg.cn/054d4b7f1d274f8493fbd8ceaa0c1b8d.png#pic_center)