Extending the Detection Range for Low-Channel Roadside LiDAR by Static Background Construction
- 通过静态背景构建扩展低通道路边雷达的探测距离
- I. INTRODUCTION
- II. RELATED WORK
- A. LiDAR-Based 3-D Vehicle and Road User Detection
- B. LiDAR Data Background Filtering
- C. Extending Detection Range for Visual Sensor
- III. LIDAR SENSOR AND ITS DATA
- IV. STATIC BACKGROUND CONSTRUCTION
- A. Background Construction
- B. 静态背景优化,减少点缺失
- C. 静态背景优化,过滤噪声点
- V. 扩大路边激光雷达探测范围
- A. Background Filtering背景过滤
- B. Detection 检测
- VII. CONCLUSIONS AND DISCUSSION
通过静态背景构建扩展低通道路边雷达的探测距离
Extending the Detection Range for Low-Channel Roadside LiDAR by Static Background Construction
本文试图通过使用低通道路边光检测和距离传感器(LiDAR:The light detection and range sensors)传感器来扩展检测范围,这是由于其价格低并且在未来被广泛使用。主要包含两部分:静态背景构建与交通目标检测
-
对于静态背景构建,利用连续的点云帧数据覆盖最大的雷达扫描水平-垂直角度,最终获得背景信息。
-
对于车辆和道路使用者检测,**基于密度的噪声应用空间聚类(DBSCAN)**算法
-
对于远距离交通目标检测,使用快速傅立叶变换(FFT)算法来过滤噪声点并识别车辆和道路使用者点。
总体过完一遍之后,发现这并不是之前看到的基于传统单阶段、两阶段的目标检测模型,而是基于点云和雷达的目标检测技术,有一定的学习基础看起来会容易一些,不然就当扩充知识面也行。
I. INTRODUCTION
目前在扩大探测范围方面的研究还存在一些有待加强的问题:
1)要求远距离目标与传感器之间没有障碍物;
2)行人作为最易受影响的道路使用者,在远距离检测中往往被忽略;
3)在复杂、高密度的交通环境中,准确性和鲁棒性会急剧下降。
我们从多帧点云中提取轨迹。为了扩大检测范围,准确检测远距离目标,在点云稀疏的远距离区域,利用快速傅里叶变换(FFT)对目标点和噪声点进行分类。
本文的主要贡献可以认为如下。
1)提出了一种新的静态背景构建方法,对背景点进行精确过滤,以适应不同等级的交通状况。
2)首次将FFT算法引入稀疏点云场景中目标点和噪声点的分类。
3)低通道LiDAR扩展探测距离的方法在复杂的交通流环境下效果良好。在远距离和LiDAR传感器之间可以存在不同的交通流密度。
4)车辆和骑车人的检测距离可以扩展到100米,相当于LiDAR的检测范围。行人检测距离可扩展至85 m。在复杂交通环境下,距离、平均查准率(AP)和平均查全率(AR)都比以往的研究有进一步的提高。
II. RELATED WORK
为了区别于已有的研究,回顾了基于LiDAR点云的车辆和道路使用者识别的相关研究。我们还回顾了尽我们所知扩展LiDAR和相机传感器的检测范围的文献。
A. LiDAR-Based 3-D Vehicle and Road User Detection
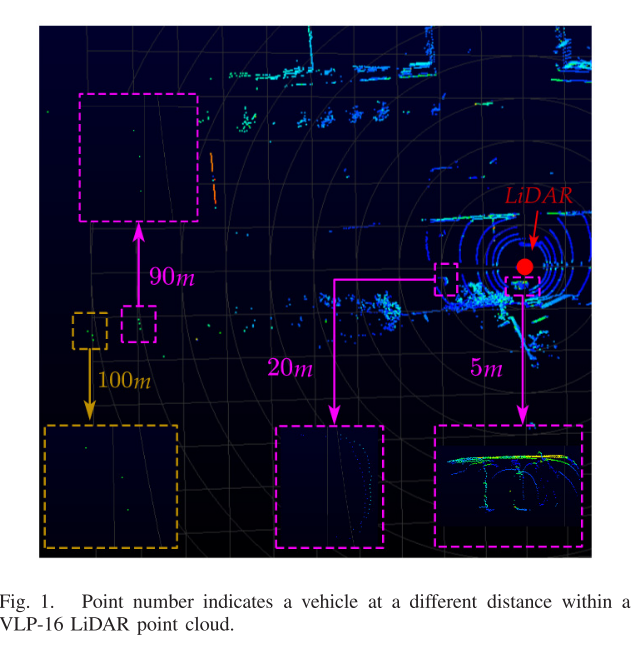
图1.点数表示在VLP-16激光雷达点云内不同距离的车辆。
B. LiDAR Data Background Filtering
C. Extending Detection Range for Visual Sensor
远距离目标的准确性和鲁棒性仍然是视觉传感器(如相机和LiDAR)的关键问题。其根本原因在于远距离的稀疏点或像素难以提取目标的关键特征。对于视觉传感器的远距离检测,机器视觉专家提出了许多模型和算法来扩展检测范围,提高检测精度。
III. LIDAR SENSOR AND ITS DATA
与诸如64通道或128通道LiDAR传感器之类的高通道LiDAR传感器相比,如果实现大规模生产,则预期低通道LiDAR传感器的价格将显著下降到大约$100。
因此,在本文中,我们使用低通道LiDAR传感器(Velodyne VLP-16)通过从其点云数据构建静态背景来扩展其检测范围。
- 单帧内的最大点数N_f可计算为:(1)
N
f
=
360
∗
N
c
/
α
r
N_f = 360 ∗ N_c / α_r
Nf=360∗Nc/αr
Nc是LiDAR的通道数,αr是LiDAR的探测水平分辨率。对于VLP-16 LiDAR,Nf大约为每帧28800。
- 在扫描区域内,可能存在最大区别激光点N_BP:(2)
N B P = 360 ° ∗ N c α m i n N_{BP} = 360° ∗ N_c α_{min} NBP=360°∗Ncαmin
对于VLP-16 LiDAR, NBP = 576000,远远大于Nf。
IV. STATIC BACKGROUND CONSTRUCTION
A. Background Construction
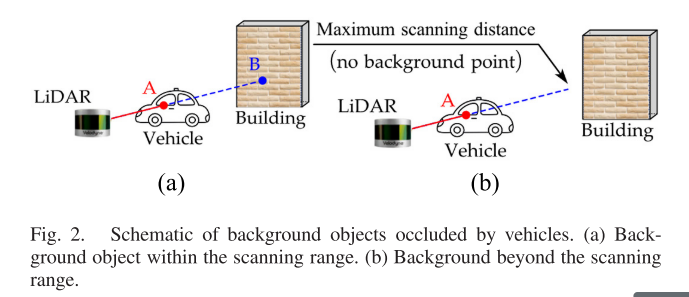
图2:被车辆遮挡的背景物体示意图。(a)扫描范围内的背景对象。(b)背景超出扫描范围。
在交通拥挤的情况下,背景对象经常被车辆或道路使用者遮挡。因此,在构建静态背景时,应去除车辆、道路使用者和噪声点。
背景对象可分为范围内对象和范围外对象。当车辆或道路用户通过时,激光束将为范围内的对象返回不同的激光点。对于远距物体,当车辆或道路用户经过时,激光束会返回激光点,否则什么也不返回,如图2所示。
采用二维矩阵MBP表示背景点云为:
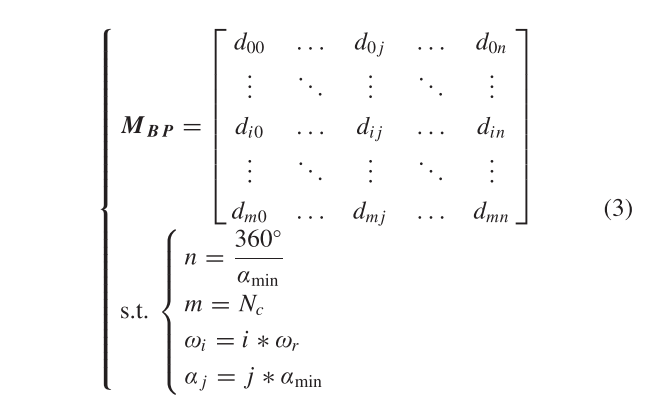
如果点云中垂直角、水平角相同,且形成的激光束相同,则定义距离最远的点为背景点:

其中,dij是矩阵MBP中第i行第j列的元素,dij是构造静态背景的点云中水平角αj和对顶角ωi处的点的距离集合。
B. 静态背景优化,减少点缺失
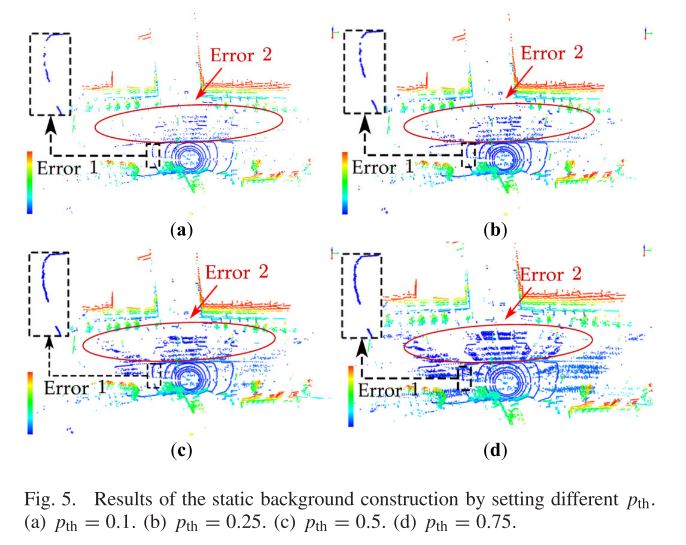
通过设置阈值pth来优化静态后台。因此(4)改写为:
从图5可以看出,随着pth值的增大,背景信息在近距离内变得更加丰富。
C. 静态背景优化,过滤噪声点
建议在文中细看,图8。之前和之后噪声点从Am去除。(a)带有噪声点的背景在红色椭圆中。(b) Am去除噪声点的背景。

图9。使用Open3d去除点后的结果。
V. 扩大路边激光雷达探测范围
EXTENDING DETECTION RANGE OF ROADSIDE LIDAR
A. Background Filtering背景过滤
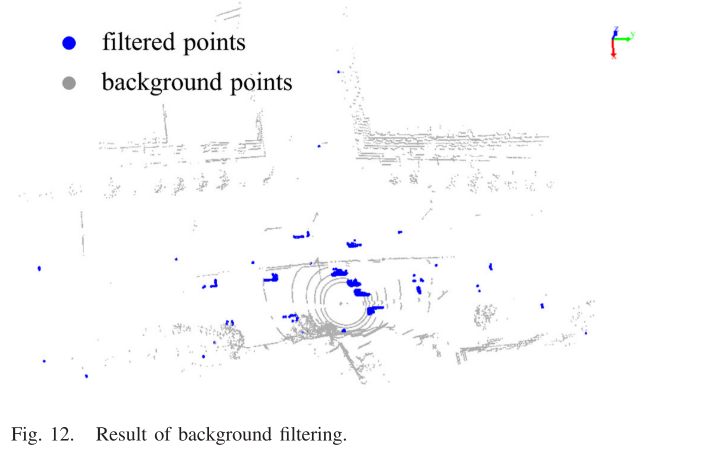
对于两步背景滤波,大部分背景点和噪声点都可以成功滤波,如图12所示。
B. Detection 检测
对于近距离,使用DBSCAN算法检测车辆和道路用户。
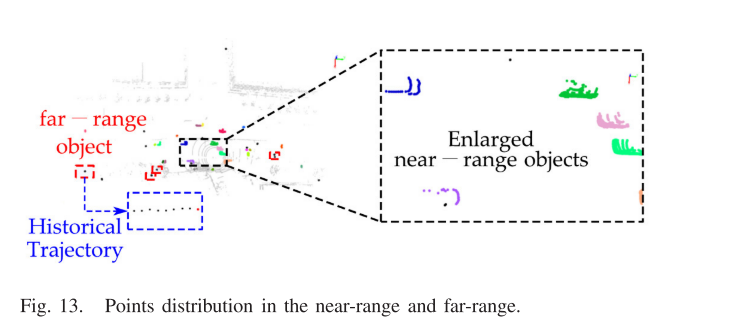
对于远距离,点云稀疏,容易被近距离物体遮挡。对于道路用户或车辆,LiDAR传感器只会检测到一个或两个点,如图13中的红色矩形所示。
VII. CONCLUSIONS AND DISCUSSION
在本文中,我们提出了一种扩展路边激光雷达探测范围的方法。首先,构造一个静态背景作为漏斗来过滤背景点。在静态背景构建中,利用多帧点云数据覆盖激光雷达传感器的最大水平角和垂直角,最终获得背景信息。此外,对静态背景进行优化,以减少远距离背景点的缺失和噪声点的出现。与其他方法相比,本文提出的方法可以用较少的点云数据构造出更精确的静态背景。


![[MySQL]MySQL数据类型](https://img-blog.csdnimg.cn/37bdeaa5ce584e7fa9cac9416a28e6a7.png)



![【洛谷 P1563】[NOIP2016 提高组] 玩具谜题(模拟+结构体数组+指针)](https://img-blog.csdnimg.cn/img_convert/2883bf91a18fa198dacc9a654ba9435b.png)