电子技术——反馈对放大器极点的影响

放大器的频率响应和稳定性可以直接由其极点决定。因此我们将深入反馈对放大器极点的影响。
稳定性和极点位置
我们首先讨论稳定性和极点位置的关系。首先我们给出结论,对于任何一个稳定的放大器,其极点都处在 s s s 平面的左半边。也就是说,极点处在右半边或是在 j ω j\omega jω 轴上的极点都会使得放大器变得不稳定。
考虑一个放大器具有共轭极点 s = σ 0 + j ω n s = \sigma_0 + j\omega_n s=σ0+jωn 。若此时放大器收到干扰,例如开关电源,则其瞬态响应应该是包含下面项的形式:
v ( t ) = e σ 0 t [ e + j ω n t + e − j ω n t ] = 2 e σ 0 t cos ( ω n t ) v(t) = e^{\sigma_0 t}[e^{+j\omega_nt} + e^{-j\omega_nt}] = 2e^{\sigma_0 t}\cos(\omega_nt) v(t)=eσ0t[e+jωnt+e−jωnt]=2eσ0tcos(ωnt)
这是一个具有包络 e σ 0 t e^{\sigma_0t} eσ0t 的余弦函数。若此时极点都处在 s s s 平面的左边,也就是说 σ 0 \sigma_0 σ0 是负数,此时振荡的幅值成指数递减至零,如图:
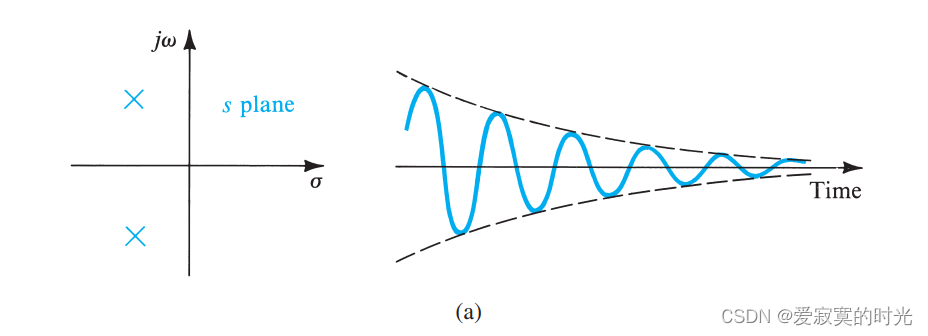
说明该系统是稳定的。
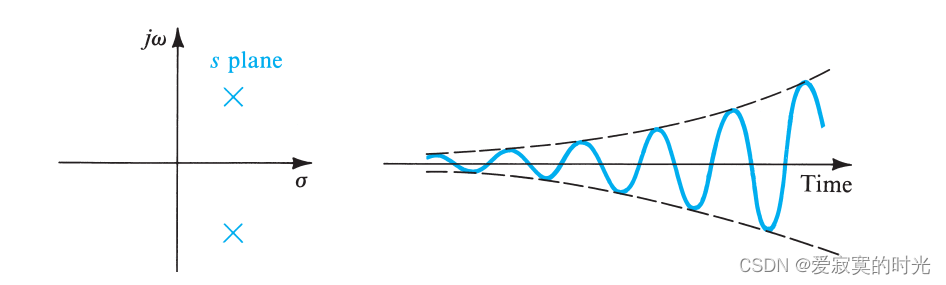
另外一方面,若此时极点都处在 s s s 平面的右边,也就是说 σ 0 \sigma_0 σ0 是正数,此时振荡的幅值成指数递增(受到非线性因素的限制不会无限增大),如图:
其次,若极点在
j
ω
j\omega
jω 轴上,此时
σ
0
=
0
\sigma_0 = 0
σ0=0 是一个稳定的余弦图像:
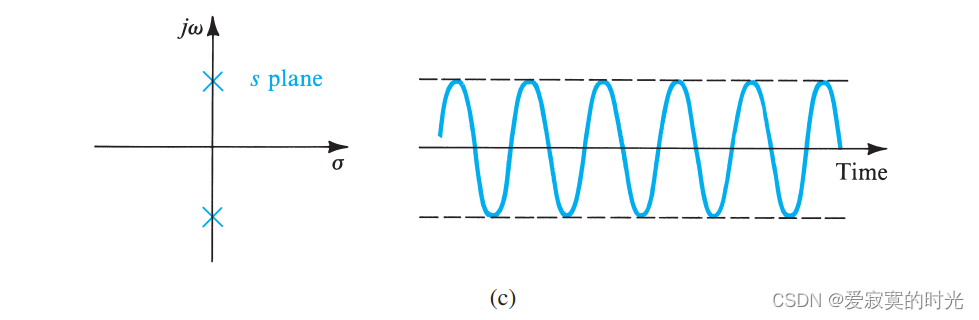
虽然我们的讨论是基于共轭极点,能够证明,任何存在于
s
s
s 平面右半边的极点都会造成系统不稳定。
反馈放大器的极点
我们从下面的表达式可知:
A f ( s ) = A ( s ) 1 + A ( s ) β ( s ) A_f(s) = \frac{A(s)}{1 + A(s)\beta(s)} Af(s)=1+A(s)β(s)A(s)
我们知道反馈放大器的极点是下面方程的零点:
1 + A ( s ) β ( s ) = 0 1 + A(s)\beta(s) = 0 1+A(s)β(s)=0
这个方程被称为反馈环路的 特征方程 。因此反馈会改变源放大器的极点。接下来,我们会讨论反馈如何改变源放大器的极点。为了方便说明,我们假设源放大器都是实数极点和非有限零点,以及 β \beta β 是一个与频率无关的常数。
单极点放大器响应
考虑一个单极点的放大器:
A ( s ) = A 0 1 + s / ω p A(s) = \frac{A_0}{1 + s / \omega_p} A(s)=1+s/ωpA0
则其闭环增益为:
A f ( s ) = A 0 / ( 1 + A 0 β ) 1 + s / ω p ( 1 + A 0 β ) A_f(s) = \frac{A_0 / (1 + A_0 \beta)}{1 + s / \omega_p (1 + A_0 \beta)} Af(s)=1+s/ωp(1+A0β)A0/(1+A0β)
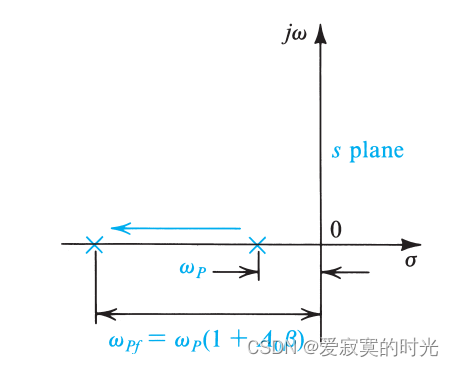
其极点在 s s s 平面的负实轴上,其极点频率为:
ω p f = ω p ( 1 + A 0 β ) \omega_{pf} = \omega_p (1 + A_0 \beta) ωpf=ωp(1+A0β)
这个过程如图所示:
下图展示了
∣
A
f
∣
|A_f|
∣Af∣ 和
∣
A
∣
|A|
∣A∣ 的博德图:
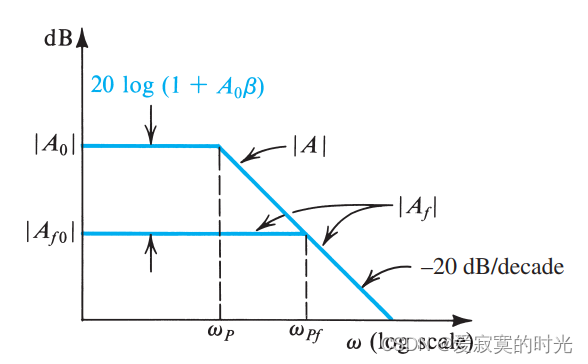
现在放大器的中频带增益差值为
20
log
(
1
+
A
0
β
)
20 \log(1 + A_0 \beta)
20log(1+A0β) 两个曲线在高频处重合。这是因为,当
ω
≫
ω
p
f
\omega \gg \omega_{pf}
ω≫ωpf 的时候:
A f ( s ) ≃ A 0 ω p s ≃ A ( s ) A_f(s) \simeq \frac{A_0 \omega_p}{s} \simeq A(s) Af(s)≃sA0ωp≃A(s)
从物理上讲,在高频处,此时环路增益小于单位一,反馈失效。
上图说明了反馈可以增加带宽,但代价是减小了中频带增益。因为对于单频极点来说,无论 β \beta β 取何值都是将极点往左移动。所以这种放大器是 无条件稳定 的。
双极点放大器响应
考虑一个具有双极点的放大器:
A ( s ) = A 0 ( 1 + s / ω p 1 ) ( 1 + s / ω p 2 ) A(s) = \frac{A_0}{(1 + s / \omega_{p1})(1 + s / \omega_{p2})} A(s)=(1+s/ωp1)(1+s/ωp2)A0
此时的环路特征方程 1 + A ( s ) β = 0 1 + A(s)\beta = 0 1+A(s)β=0 为:
s 2 + s ( ω p 1 + ω p 2 ) + ( 1 + A 0 β ) ω p 1 ω p 2 = 0 s^2 + s(\omega_{p1} + \omega_{p2}) + (1 + A_0\beta)\omega_{p1}\omega_{p2} = 0 s2+s(ωp1+ωp2)+(1+A0β)ωp1ωp2=0
二次方程具有解:
s = − 1 2 ( ω p 1 + ω p 2 ) ± 1 2 ( ω p 1 + ω p 2 ) 2 − 4 ( 1 + A 0 β ) ω p 1 ω p 2 s = -\frac{1}{2}(\omega_{p1} + \omega_{p2}) \pm \frac{1}{2}\sqrt{(\omega_{p1} + \omega_{p2})^2 - 4(1 + A_0\beta)\omega_{p1}\omega_{p2}} s=−21(ωp1+ωp2)±21(ωp1+ωp2)2−4(1+A0β)ωp1ωp2
我们从上面的表达式发现,随着中频环路增益 A 0 β A_0\beta A0β 从零开始增加,两个极点逐渐靠近,存在一个时刻此时两个极点恰好重合,继续增加两个极点变成两个在同一个垂线上的共轭的复数极点,下图展示了变化过程:
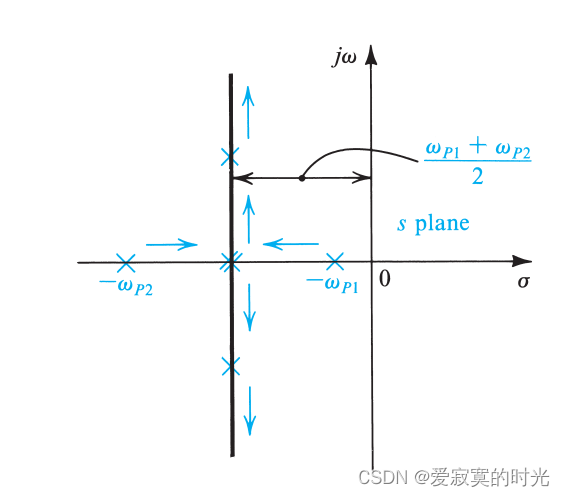
这个图被称为 根轨迹图 。从上图可以看成,放大器依然是无条件稳定的。
另外,在以后我们会学习这样的二阶响应会存在一个峰值点。任何一个二阶网络的特征方程都可以表示为下面的形式:
s 2 + s ω 0 Q + ω 0 2 = 0 s^2 + s\frac{\omega_0}{Q} + \omega_0^2 = 0 s2+sQω0+ω02=0
这里 ω 0 \omega_0 ω0 称为 极点频率 Q Q Q 称为 极点 Q 因子 。若 Q > 0.5 Q > 0.5 Q>0.5 此时两个极点是共轭复数。一个几何的解释如下图:
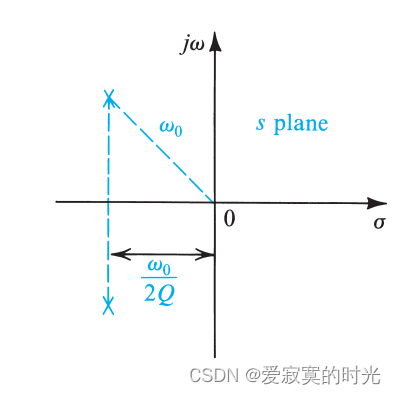
ω
0
\omega_0
ω0 是极点到原点的距离,而
Q
Q
Q 说明了共轭轴到虚轴的距离。通过比对上面的两个方程的形式,我们知道:
Q = ( 1 + A 0 β ) ω p 1 ω p 2 ω p 1 + ω p 2 Q = \frac{\sqrt{(1 + A_0\beta)\omega_{p1}\omega_{p2}}}{\omega_{p1} + \omega_{p2}} Q=ωp1+ωp2(1+A0β)ωp1ωp2
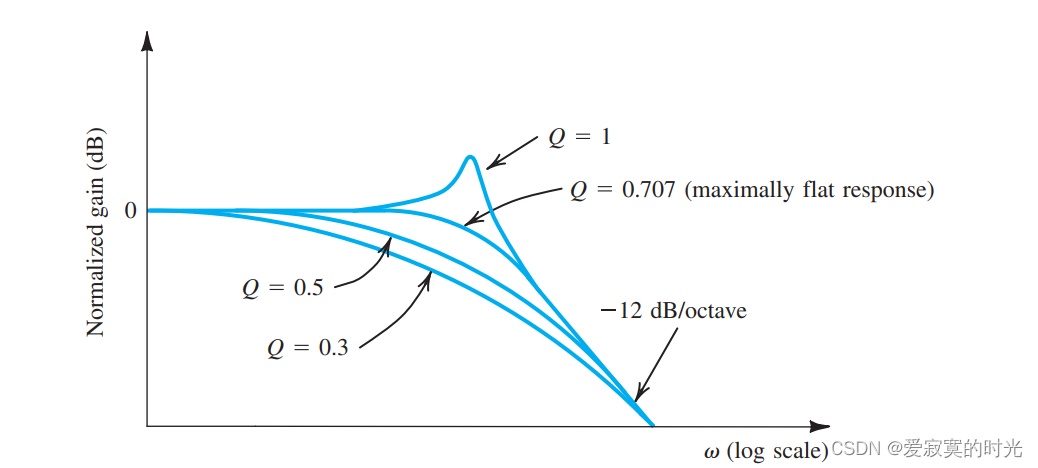
我们以后将会学习,当 Q < 0.707 Q < 0.707 Q<0.707 的时候没有峰值点,在 Q = 0.707 Q = 0.707 Q=0.707 的时候是一个边界,此时出现 最大平坦度 响应,如下图:
通过上述讨论,我们知道通过引入反馈可以改变源放大器的极点位置,这也是设计主动滤波器的精华:
三极点和多极点放大器响应
如图是一个三极点的根轨迹图:
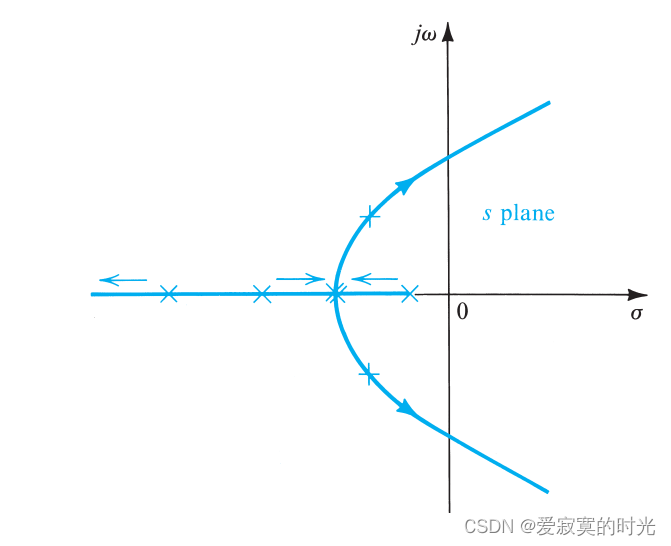
从上图我们知道,随着环路增益的不断增大,极点会进入平面的右半区域,这会使放大器不稳定,为了使放大器保持稳定,那么我们在设计的时候就必须让 A 0 β A_0\beta A0β 保持在小于边界点的地方。对应奈奎斯特图,即在通过点 ( − 1 , 0 ) (-1,0) (−1,0) 的时候。总之,减少 A 0 β A_0\beta A0β 会让放大器稳定,增加则会让放大器处于不稳定。
也就是说,存在一个最大的 β \beta β 使得放大器处于稳定状态,也就是存在最小稳定闭环增益的 A f 0 A_{f0} Af0 。为了获得更低的闭环增益,我们可以使用改变 L ( s ) L(s) L(s) 函数,这称为频率补偿。
在我们结束本节之前,其实存在一个构建多极点和有穷零点的放大器根轨迹图的一般性方法。然而,我们并不在此介绍,尽管根轨迹图使得分析极点更加的精确,我们存在一个更加简单的使用博德图的分析方法。