【2023-2-22】FastDeploy 安装编译教程
该测试 FastDeploy CPU版本。
1. fastDeploy库编译
1.1 官方预编译库下载
预编译库下载安装
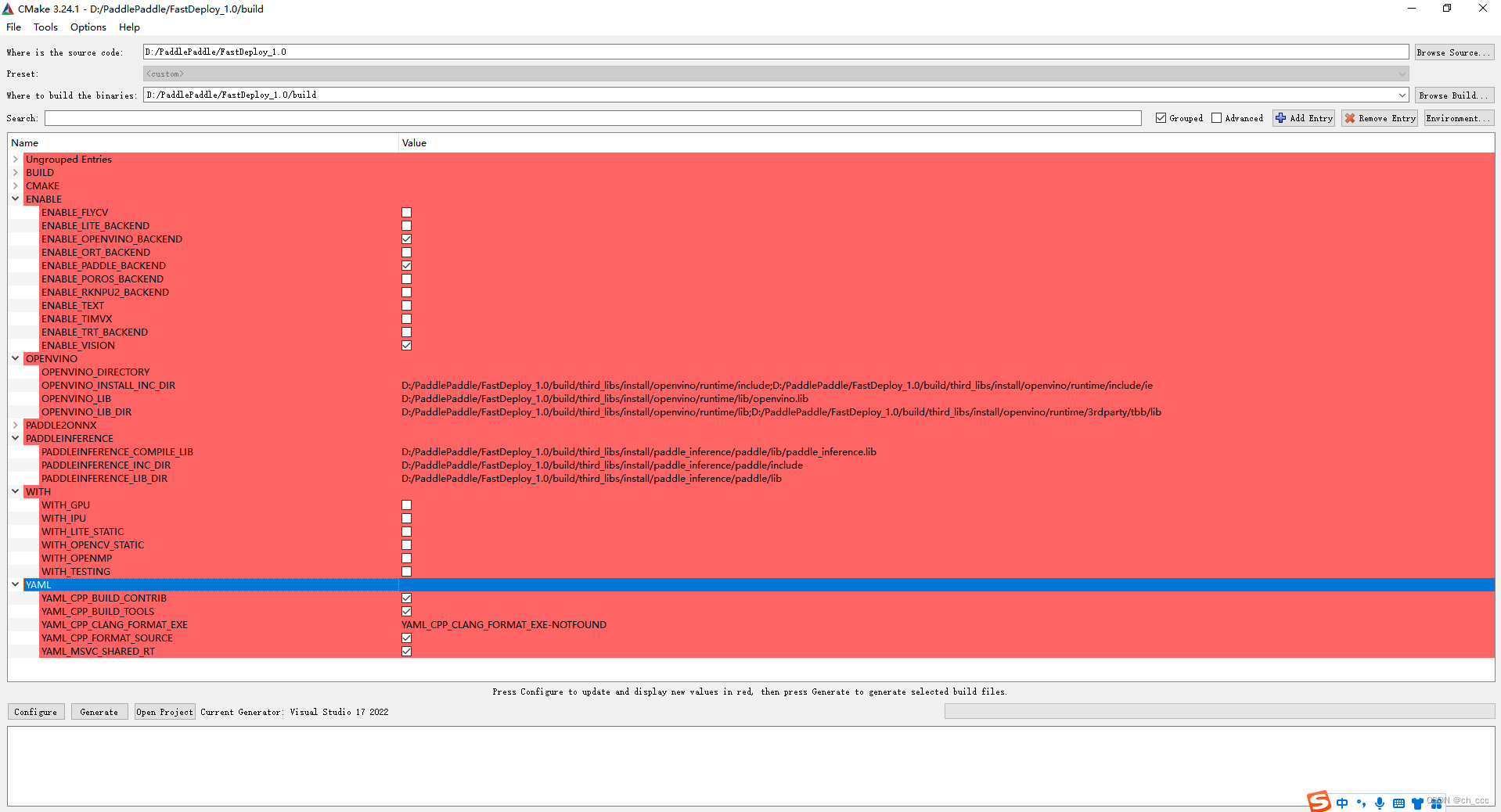
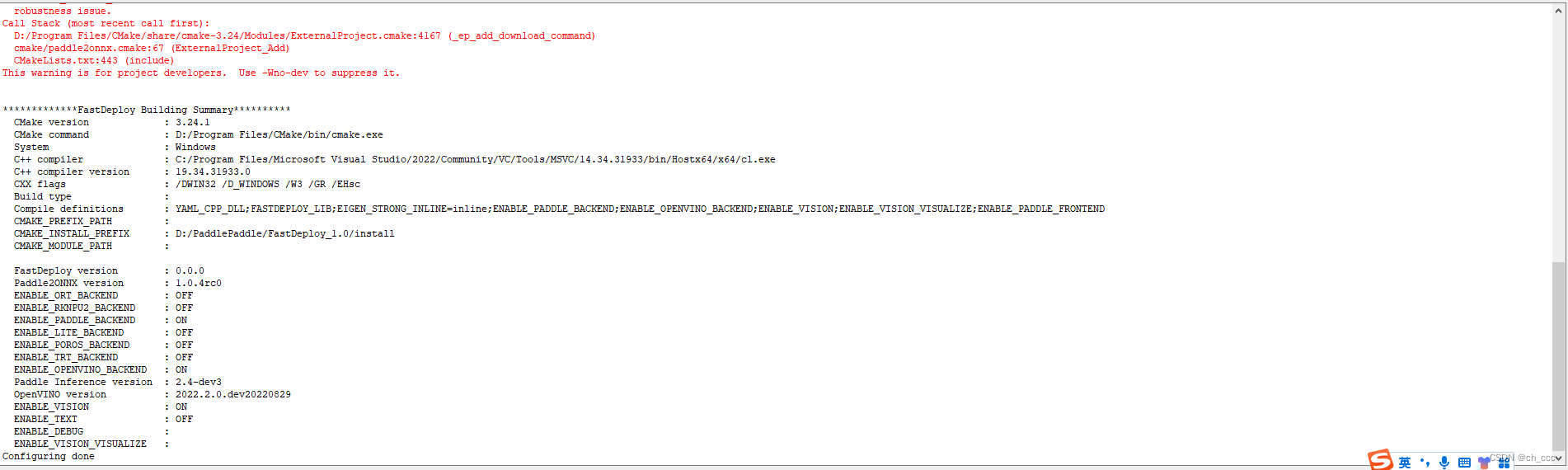
1.2 自定义CPU版本库编译
- 官方编译FastDeploy教程
CMakeGUI + VS 2019 IDE编译FastDeploy
- 本人编译教程
-
CMAKE_CONFIGURATION_TYPES属性设置为Release -
请不要勾选
WITH_GPU和ENABLE_TRT_BACKEND -
开启
ENABLE_PADDLE_BACKENDENABLE_OPENVINO_BACKENDENABLE_VISION -
指定
CMAKE_INSTALL_PREFIX安装路径 -
生成
fastdeploy.sln解决方案文件选择Release版本,生成编译,点击"INSTALL"->右键点击"生成"将编译好的SDK安装到先前指定的目录步骤⑤。
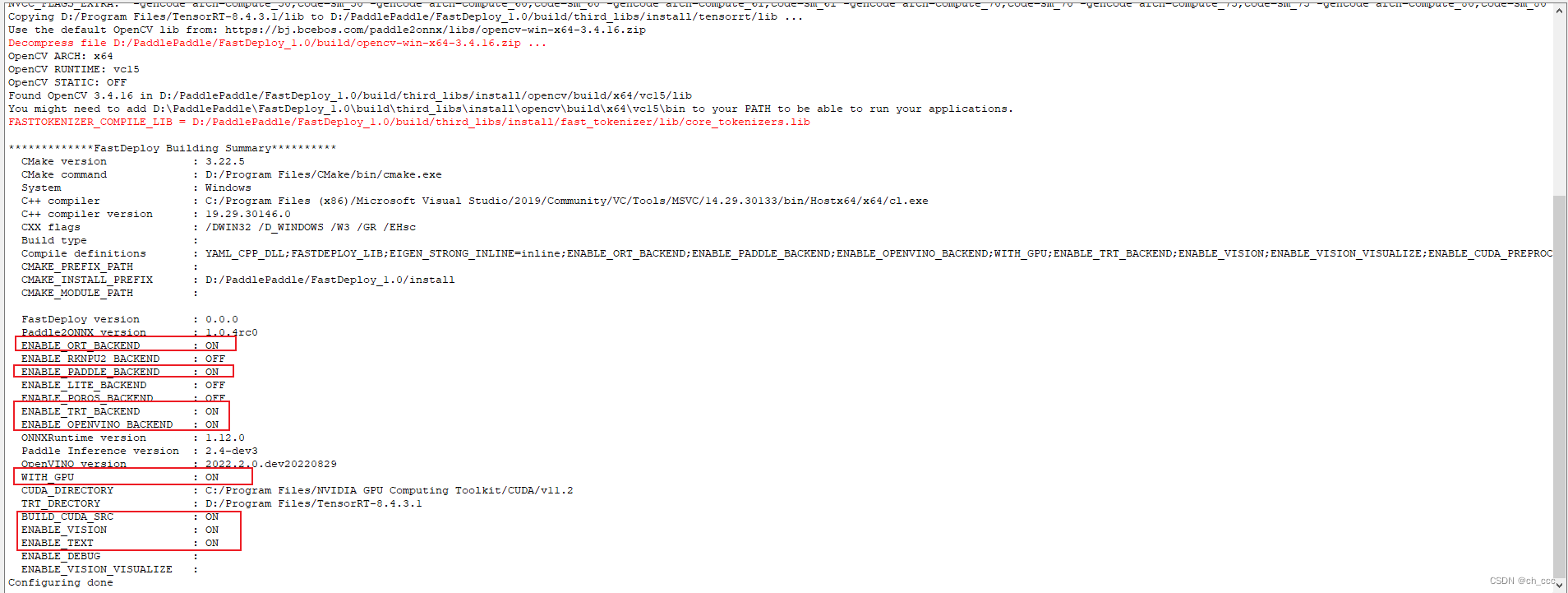
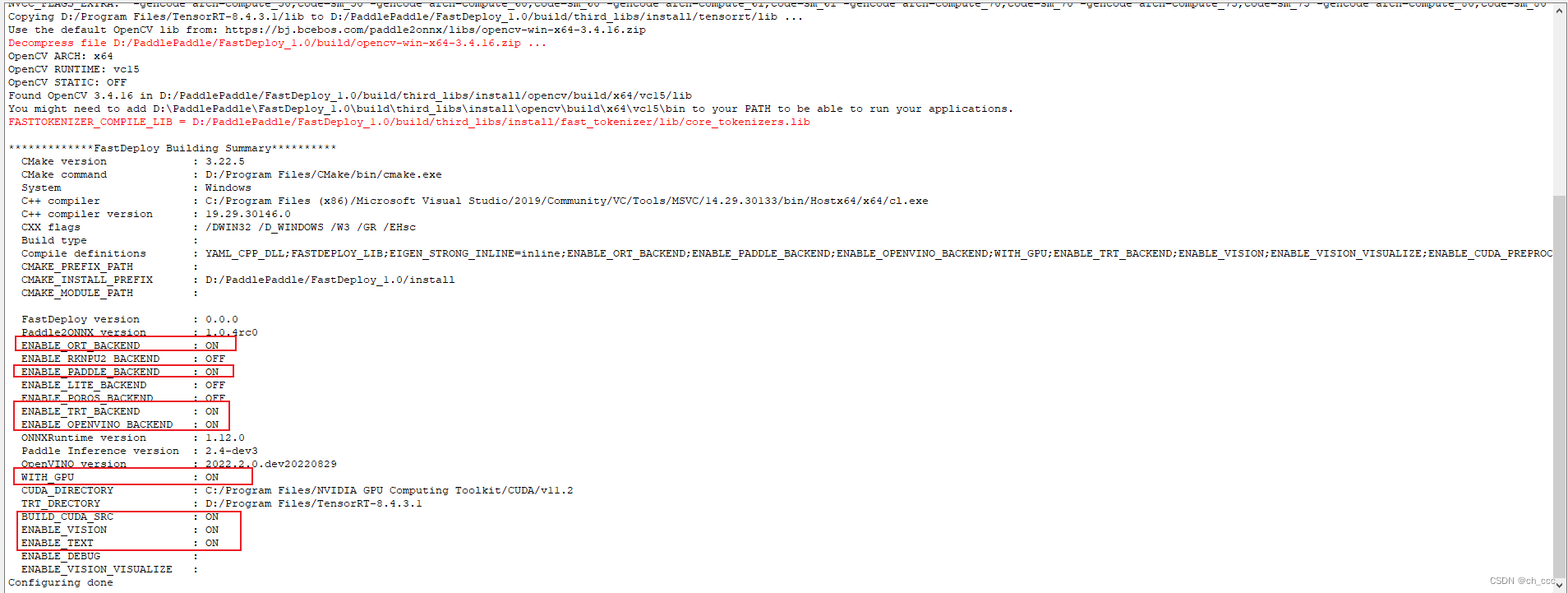
1.3 自定义GPU版本库编译
- 官方编译FastDeploy教程
CMakeGUI + VS 2019 IDE编译FastDeploy
- 本人编译教程
-
CMAKE_CONFIGURATION_TYPES属性设置为Release -
勾选
WITH_GPU和ENABLE_TRT_BACKEND -
开启
ENABLE_ORT_BACKENDENABLE_PADDLE_BACKENDENABLE_TRT_BACKENDENABLE_OPENVINO_BACKENDENABLE_VISIONENABLE_TEXT -
设置
CUDATensorRT路径
CUDA_DIRECTORY : C:/Program Files/NVIDIA GPU Computing Toolkit/CUDA/v11.2
TRT_DRECTORY : D:/Program Files/TensorRT-8.4.3.1
-
指定
CMAKE_INSTALL_PREFIX安装路径 -
生成
fastdeploy.sln解决方案文件选择Release版本,生成编译,点击"INSTALL"->右键点击"生成"将编译好的SDK安装到先前指定的目录步骤⑤。
1.4 样例测试
picodet_l_320_coco_lcnet 模型下载
/*
* @Description:
* @Version: 0.0.1
* @Author: chccc
* @Date: 2023-02-19 00:19:22
* @LastEditors: chccc
* @LastEditTime: 2023-02-20 17:23:21
* @FilePath: \cpp\infer.cpp
*/
#include <iostream>
#include "fastdeploy/vision.h"
void PicoDetGpuInfer(const std::string& model_dir, const std::string& image_file)
{
std::string model_file = "picodet_l_320_coco_lcnet/model.pdmodel";
std::string params_file ="picodet_l_320_coco_lcnet/model.pdiparams";
std::string config_file ="picodet_l_320_coco_lcnet/infer_cfg.yml";;
auto option = fastdeploy::RuntimeOption();
option.UseGpu(0);
fastdeploy::vision::detection::PicoDet model = fastdeploy::vision::detection::PicoDet(model_file, params_file, config_file, option);
std::cout<<typeid(model).name()<<std::endl;
if (!model.Initialized()) {
printf("[%s][%d] Error: fastdeploy::vision::detection::PicoDet initialized failed !\n", __func__, __LINE__);
return;
}
auto im = cv::imread(image_file);
auto im_bak = im.clone();
auto start = std::chrono::system_clock::now();
fastdeploy::vision::DetectionResult result;
if (!model.Predict(&im, &result)) {
printf("[%s][%d] Error: Failed to predict !\n", __func__, __LINE__);
return;
}
//std::cout << res.Str() << std::endl;
auto end = std::chrono::system_clock::now();
auto duration = std::chrono::duration_cast<std::chrono::microseconds>(end - start);
double costTime = double(duration.count()) * std::chrono::microseconds::period::num / std::chrono::microseconds::period::den;
//printf("[%s][%d] model.Predict success, cost time: %lf s \n", __func__, __LINE__, costTime);
std::cout << "==========================================================================" << std::endl;
float score_thereshold = 0.8;
int line_size = 2;
float font_size = 1;
auto vis_image = fastdeploy::vision::Visualize::VisDetection(im_bak, result, score_thereshold, line_size, font_size);
std::string vis_image_path = "./images/vis_result.jpg";
cv::imwrite(vis_image_path, vis_image);
printf("[%s][%d] Visualized result saved in %s !\n", __func__, __LINE__, vis_image_path.c_str());
}
int main()
{
std::cout << "=============== TEST ===============" << std::endl;
std::string model_dir = "./models/";;
std::string image_file = "./images/1.jpg";
//计时
auto start = std::chrono::system_clock::now();
PicoDetGpuInfer(model_dir, image_file);
//计时
auto end = std::chrono::system_clock::now();
auto duration = std::chrono::duration_cast<std::chrono::microseconds>(end - start);
double costTime = double(duration.count()) * std::chrono::microseconds::period::num / std::chrono::microseconds::period::den;
printf("[%s][%d] Model infer success, cost time: %lf s \n", __func__, __LINE__, costTime);
std::cout << "=============== Finished ===============" << std::endl;
}