文章目录
- RETHINKING NETWORK DESIGN AND LOCAL GEOMETRY IN POINT CLOUD: A SIMPLE RESIDUAL MLP FRAMEWORK
- PointMLP
- 残差点模块
- 几何仿射模块
- 精简版模型:PointMLP-elite
- 实验结果
- 消融实验
RETHINKING NETWORK DESIGN AND LOCAL GEOMETRY IN POINT CLOUD: A SIMPLE RESIDUAL MLP FRAMEWORK
现有的基于点的点云分析深度模型为了捕获3D局部几何信息,设计了复杂的局部几何特征提取器。然而,这些方法的复杂度很高,且性能提升在近几年中趋于饱和。这篇文章认为局部几何信息可能不是点云分析的关键,提出了一个简单而有效的深度残差MLP网络:PointMLP。实验结果展示了即使没有精心设计的局部几何特征提取器,使用单纯的深层MLP架构也能在一些任务上得到令人满意的性能和更好的结果。
PointMLP
推荐阅读:【NIPS 2017】PointNet++:度量空间中点集的深层次特征学习 https://binaryai.blog.csdn.net/article/details/124942017
PointNet++提出了一个用于点云分析的通用Pipeline,其局部特征提取器可以公式化为:

其中 A \mathcal{A} A为汇聚(aggregation)函数(PointNet++为max-pooling), Φ ( ⋅ ) \mathcal{\Phi(\cdot)} Φ(⋅)表示局部特征提取函数(PointNet++为MLP); f i , j f_{i,j} fi,j为第 i i i个点的第 j j j个近邻点的特征。
PointMLP与现有的方法一样,延用了PointNet++的Pipeline。但与现有的许多方法(使用卷积、图或自注意机制设计局部特征提取器 Φ ( ⋅ ) \mathcal{\Phi(\cdot)} Φ(⋅)。)不同,PointMLP没有使用复杂的局部几何特征提取器。
如图2所示,PointMLP每个阶段包括残差点模块(Residual Point (ResP) Block)和几何仿射模块(Geometric Affine Module)。残差点模块通过简单的前馈残差MLP来学习点云的特征。轻量级的几何仿射模块用于对局部点进行标准化,以进一步提高模型鲁棒性和性能。
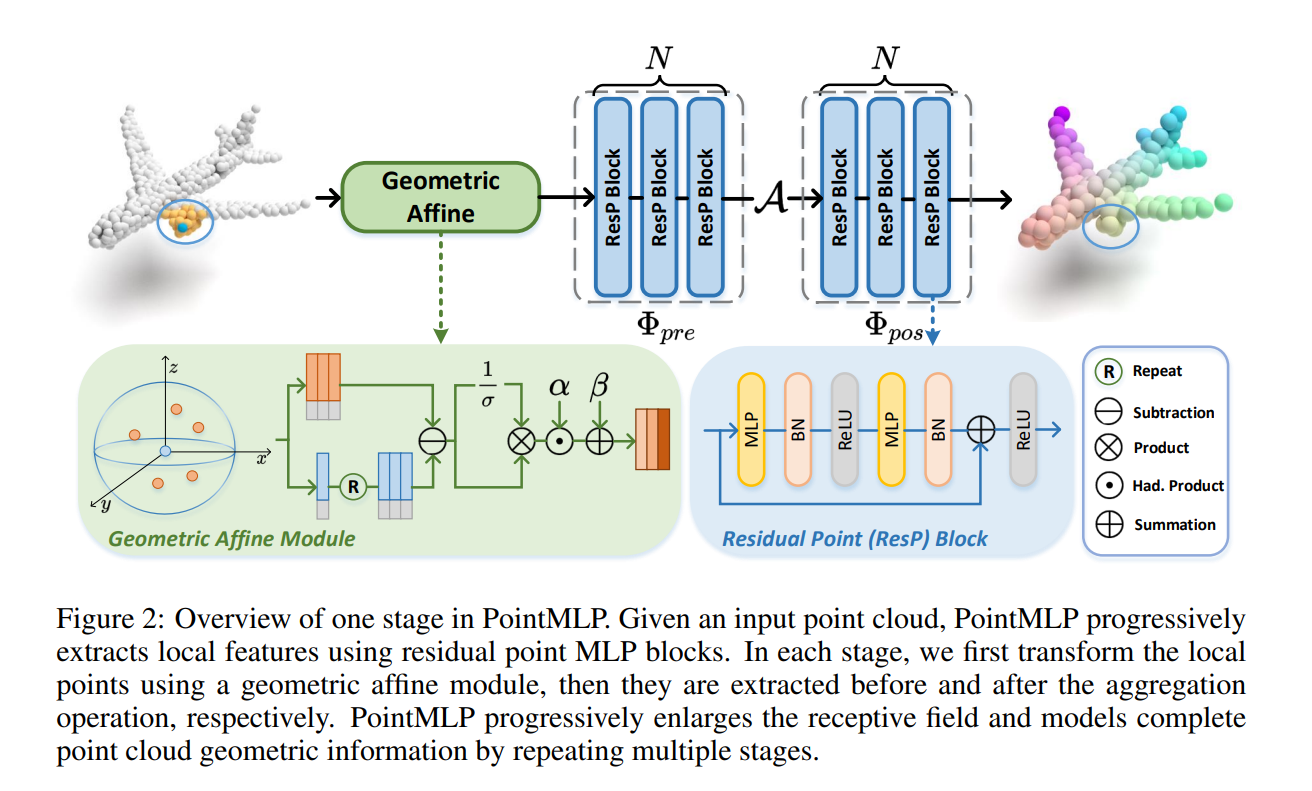
通过堆叠图2中的模块,可以构建深层次的点云分析深度网络。
残差点模块

PointMLP中的的核心操作可以表述为:

其中 Φ p r e ( ⋅ ) \mathcal{\Phi_{pre}(\cdot)} Φpre(⋅)和 Φ p o s ( ⋅ ) \mathcal{\Phi_{pos}(\cdot)} Φpos(⋅)为残差点模块: MLP ( x ) + x \operatorname{MLP} (x) + x MLP(x)+x( MLP ( x ) \operatorname{MLP} (x) MLP(x)由全连接层、归一化层和激活层组合(重复两次)), Φ p r e ( ⋅ ) \mathcal{\Phi_{pre}(\cdot)} Φpre(⋅)用于学习局部区域的共享参数; Φ p o s ( ⋅ ) \mathcal{\Phi_{pos}(\cdot)} Φpos(⋅)用于提取汇聚的特征;与PointNet++一样, A \mathcal{A} A为max-pooling。
几何仿射模块

令 { f i . j } j = 1 , . . . , k ∈ R k × d \{f_{i.j}\}_{j=1,...,k}\in \mathbb{R}^{k\times d} {fi.j}j=1,...,k∈Rk×d为 f i f_i fi的 k k k个局部邻点的特征组合。每个邻点特征 f i , j f_{i,j} fi,j为 d d d维向量。几何仿射模块通过以下公式标准化局部相邻点的特征:

其中 α ∈ R d \alpha\in \mathbb{R}^d α∈Rd和 β ∈ R d \beta \in \mathbb{R}^d β∈Rd为可学习的参数, ⊙ \odot ⊙为逐元素乘积。 ϵ = 1 e − 5 \epsilon=1e^{-5} ϵ=1e−5是为了数值稳定性。 σ σ σ是一个标量,描述了所有局部分组和通道的特征偏差。
精简版模型:PointMLP-elite
PointMLP:

PointMLP-elite:

精简版的PointMLP(PointMLP-elite)主要做了以下调整:
-
减少了残差点模块的数量;
-
减少嵌入特征;
-
Φ p r e ( ⋅ ) \mathcal{\Phi_{pre}(\cdot)} Φpre(⋅)和 Φ p o s ( ⋅ ) \mathcal{\Phi_{pos}(\cdot)} Φpos(⋅)采用瓶颈(Bottleneck)结构:首先将特征通道数量减少 r r r倍,然后再将通道数量增加 r r r倍。
实验结果
SHAPE CLASSIFICATION ON MODELNET40

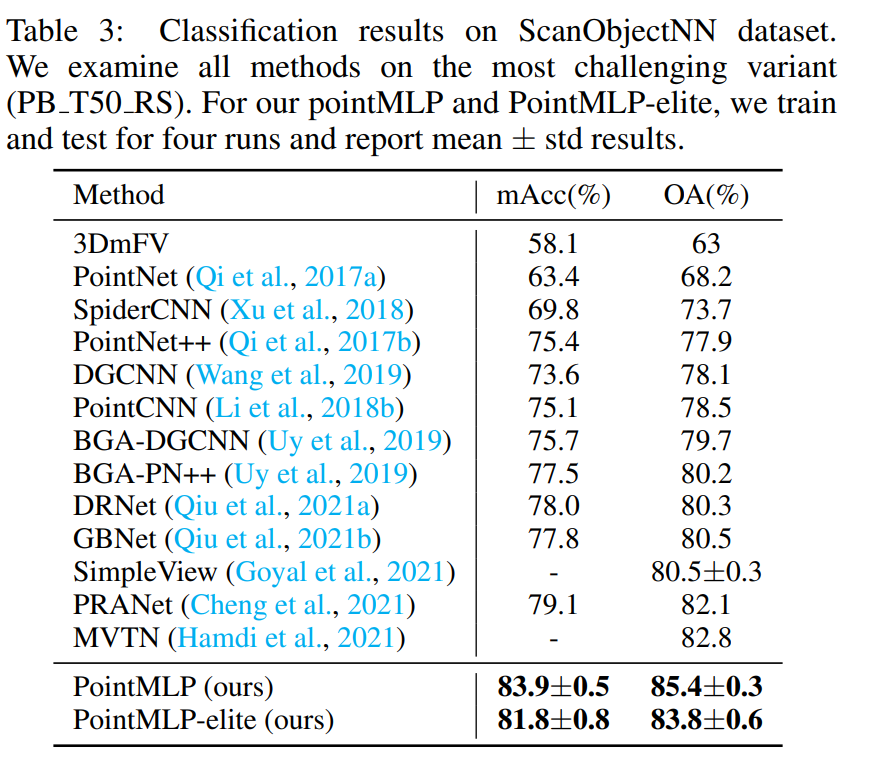
SHAPE CLASSIFICATION ON SCANOBJECTNN
PART SEGMENTATION

消融实验
Network Depth

Geometric Affine Module

Component ablation
study.

Loss landscape



![零基础 Ubuntu 20.04.01 下搭建51单片机开发环境[开源编译器SDCC]](https://img-blog.csdnimg.cn/0ceb5bb690de4071aaafbbe6e456df18.jpeg#pic_left)







![[Golang实战]github.io部署个人博客hugo[新手开箱可用][小白教程]](https://img-blog.csdnimg.cn/b9565c6a03bb4c61b62ffe1889591aa5.png)