波束形成
本质上是设计合适的滤波器,对于一类固定滤波器系数的阵列来说,无论输入信号或者噪声信号的统计特征如何,其滤波器系数固定不变,此类波束形成叫Fixed Beamforming,固定波束形成好比传统数字信号处理里面的经典滤波器;与此相对的一类就是自适应滤波器,阵列里就有相应的Adaptive Beamforming,其滤波器的系数是跟随着噪声场的变化而变化的。
波束问题建模:
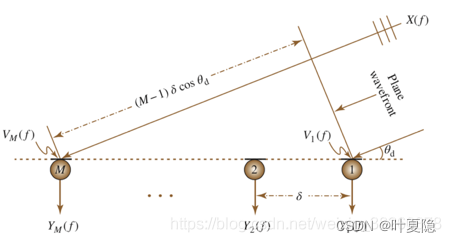
theta为入射角,\tau_0 为入射角等于0时两个麦克风之间的时延,f代表频率:导向矢量可表示为:

观测信号y:

观测信号的功率谱密度:

其中x(f)为信号的方差,v(f)为噪声的相关系数矩阵。
阵列信号处理无非就是对每个接受信号乘以滤波器的系数在求和,在频域表现则是直接频谱相乘再相加:

阵列的在频率等于f时候的滤波器系数:

MVDR就是在 中令
中令
性能指标:
性能指标都是关于频率的函数,即提到以下指标时要注明所讨论的频率
1、阵列增益:

 为噪声的空间相关系数矩阵。
为噪声的空间相关系数矩阵。
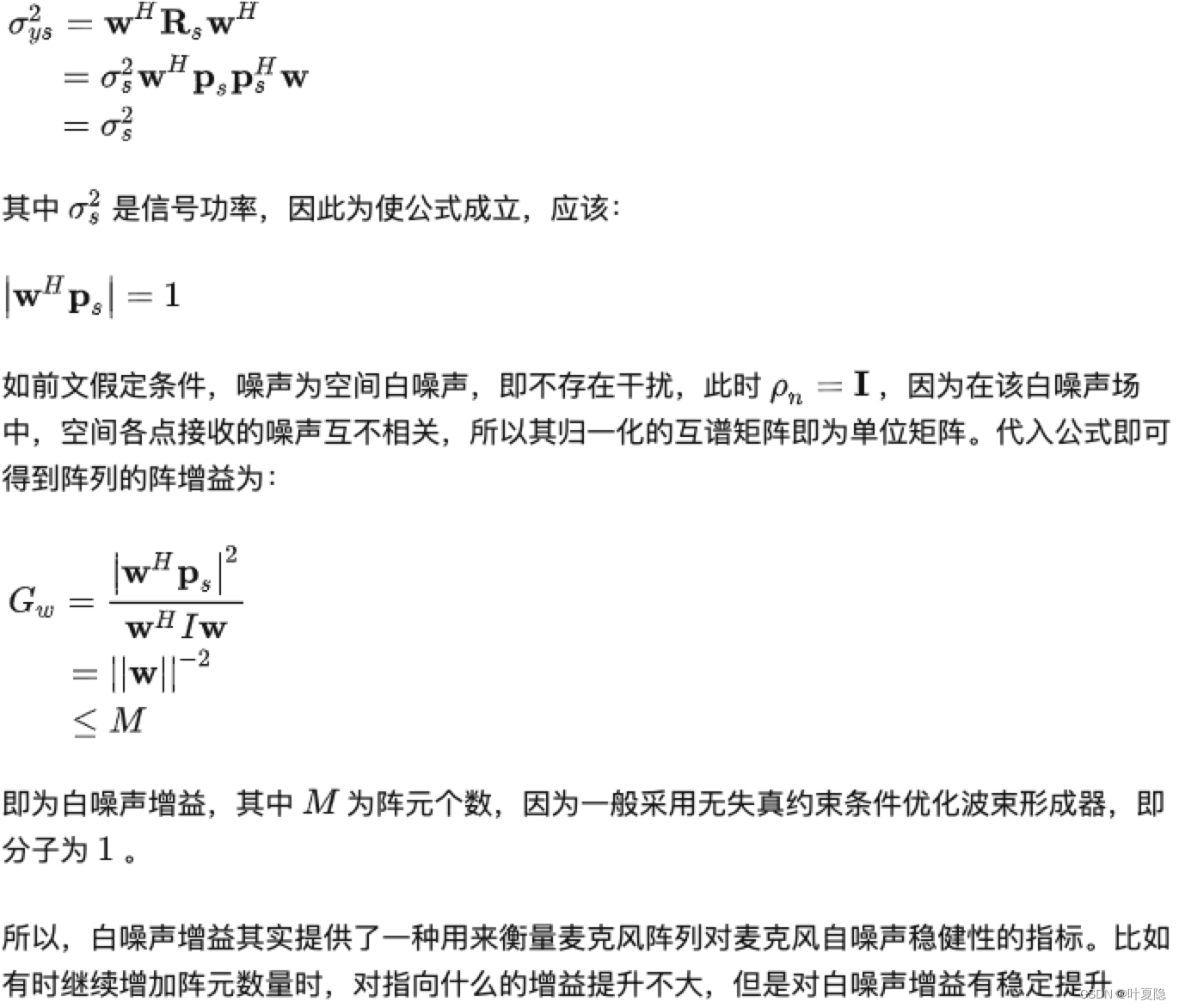
2、白噪声增益:
当噪声是白噪声时,空间中不同的任意两点的相关系数为0,所以上述噪声空间相关系数矩阵是主对角为1,其余全为0 的单位阵

白噪声增益可以看成是信噪比增益的特例,在相应的假设条件下,其实阵列的白噪声增益就是波束形成器系数的范数。
从公式可以看出,如果波束形成器加权向量w乘以一个标量,阵增益保持不变。所以在波束设计过程中,长对加权向量进行归一化处理,让波束输出信号的功率谱与输入信号的功率谱保持一致,即应该:
3、指向性因子:
考虑阵列工作于扩散声场,因此可同理写为:

扩散噪声场模型:
4、波束图
基本概念:
1、空间混叠:
空间发生混叠,即阵列分不清信号来自哪个方向了,也就是存在两个不同的 theta, 满足

此时steering vector中的任一项是满足在两个角度下相等的,所以,此时发生了混叠。由基本三角函数定理
只有 才不会发生空间混叠。
才不会发生空间混叠。
2、阵列孔径大小:

连续线阵长度与波长的比值 L/lamda 被称为孔径大小,线阵的孔径越大,其波束主瓣宽度越窄。而且,所有波束的第一旁瓣高度相等,均为-13.26dB。