目录
- 0 专栏介绍
- 1 A*算法的弊端
- 2 跳点搜索算法
- 2.1 自然与强制邻点
- 2.2 跳点剪枝策略
- 3 算法仿真与实现
- 3.1 算法流程
- 3.2 ROS C++实现
- 3.3 Python实现
- 3.4 Matlab实现
0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。
🚀详情:图解自动驾驶中的运动规划(Motion Planning),附几十种规划算法
1 A*算法的弊端
A*算法是非常有效且常用的路径规划算法之一,其是结合Dijsktra算法与GBFS各自优势的启发式搜索算法,其具体原理请参考路径规划 | 图解A*、Dijkstra、GBFS算法的异同(附C++/Python/Matlab仿真)。然而,A*算法有个明显的缺陷——拓展了太多的无用节点
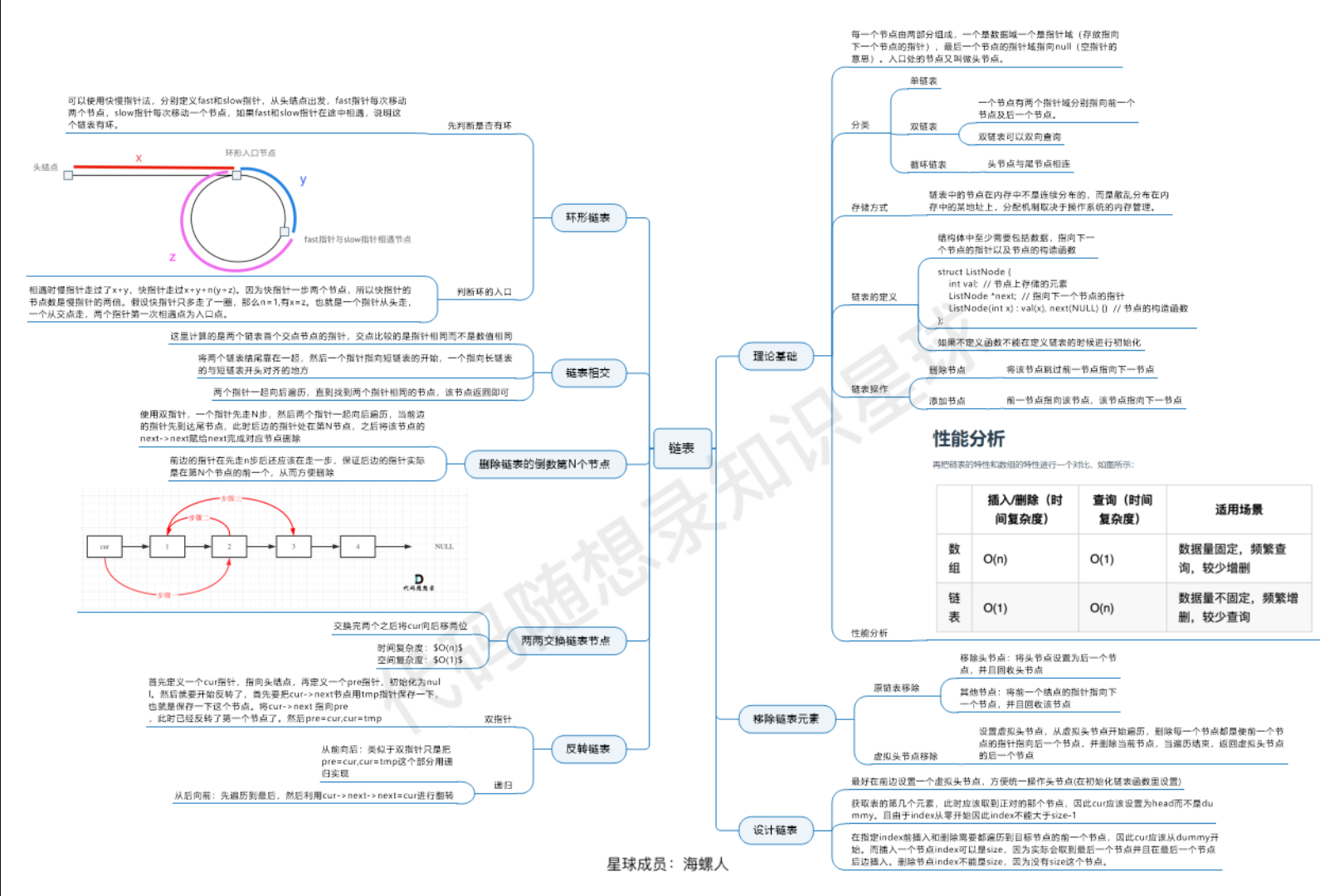
例: 如图所示,从起点 s s s到终点 g g g有三条可行路线:
- L 1 = { ( 1 , 2 ) → ( 2 , 3 ) → ( 3 , 2 ) } L_1=\left\{ \left( 1,2 \right) \rightarrow \left( 2,3 \right) \rightarrow \left( 3,2 \right) \right\} L1={(1,2)→(2,3)→(3,2)}
- L 2 = { ( 1 , 2 ) → ( 2 , 2 ) → ( 3 , 2 ) } L_2=\left\{ \left( 1,2 \right) \rightarrow \left( 2,2 \right) \rightarrow \left( 3,2 \right) \right\} L2={(1,2)→(2,2)→(3,2)}
- L 3 = { ( 1 , 2 ) → ( 2 , 1 ) → ( 3 , 2 ) } L_3=\left\{ \left( 1,2 \right) \rightarrow \left( 2,1 \right) \rightarrow \left( 3,2 \right) \right\} L3={(1,2)→(2,1)→(3,2)}
直观地,路径 L 1 L_1 L1、 L 3 L_3 L3的探索对最优路径的生成时没有意义的,但传统A*算法仍会在扩展邻域时评估这些不必要的节点,例如图中的灰色栅格,造成其应用时存在内存消耗大、运行时间长等缺陷

2 跳点搜索算法
2.1 自然与强制邻点
针对A*算法的缺陷,Harabor等提出跳点搜索算法(Jump Point Search, JPS),筛选出有价值的节点——称为跳点而剪去那些无意义的冗余节点。
设 n n n是节点 x x x的邻接点, p p p是节点 x x x的父节点,节点 x x x的邻域采用八邻域法,则跳点剪枝策略中的基本概念如下:
-
自然邻点:当节点 x x x邻域不存在障碍时(暂时移除障碍),若从 p p p出发任意不经过节点 x x x到达 n n n的路径 < p , ⋯ , n ∣ x > <p,\cdots ,n|x> <p,⋯,n∣x>比经过 x x x到达 n n n的路径 < p , ⋯ , x , ⋯ , n > <p,\cdots ,x,\cdots ,n> <p,⋯,x,⋯,n>长,即
{ L ( < p , ⋯ , n ∣ x > ) ⩾ L ( < p , ⋯ , x , ⋯ , n > ) , p 是 x 的对角节点 L ( < p , ⋯ , n ∣ x > ) > L ( < p , ⋯ , x , ⋯ , n > ) , o t h e r w i s e \begin{cases} L\left( <p,\cdots ,n|x> \right) \geqslant L\left( <p,\cdots ,x,\cdots ,n> \right) , p\text{是}x\text{的对角节点}\\ L\left( <p,\cdots ,n|x> \right) >L\left( <p,\cdots ,x,\cdots ,n> \right) , \mathrm{otherwise}\\\end{cases} {L(<p,⋯,n∣x>)⩾L(<p,⋯,x,⋯,n>),p是x的对角节点L(<p,⋯,n∣x>)>L(<p,⋯,x,⋯,n>),otherwise
恒成立,则称邻接点 n n n是节点 x x x在父节点是 p p p时的自然邻点 -
强制邻点:当节点 x x x的邻域存在障碍时,若从 p p p出发任意不经过节点 x x x到达 n n n的路径 < p , ⋯ , n ∣ x > <p,\cdots ,n|x> <p,⋯,n∣x>比经过节点 x x x到达 n n n的路径 < p , ⋯ , x , ⋯ , n > <p,\cdots ,x,\cdots ,n> <p,⋯,x,⋯,n>长,且节点 n n n不是节点 x x x的自然邻点,则称邻接点 n n n是节点 x x x在父节点是 p p p时的强制邻点,如图所示为水平搜索与斜搜索情况下的八种强制邻点情况。

2.2 跳点剪枝策略
跳点本质上是搜索方向可能发生改变的点,其筛选规则为
- 若节点 x x x是终点,则节点 x x x是跳点;
- 若节点 x x x存在至少一个强制邻点,则节点 x x x是跳点;
- 在斜向搜索时,若节点 x x x在水平或垂直分量上有跳点,则节点 x x x是跳点
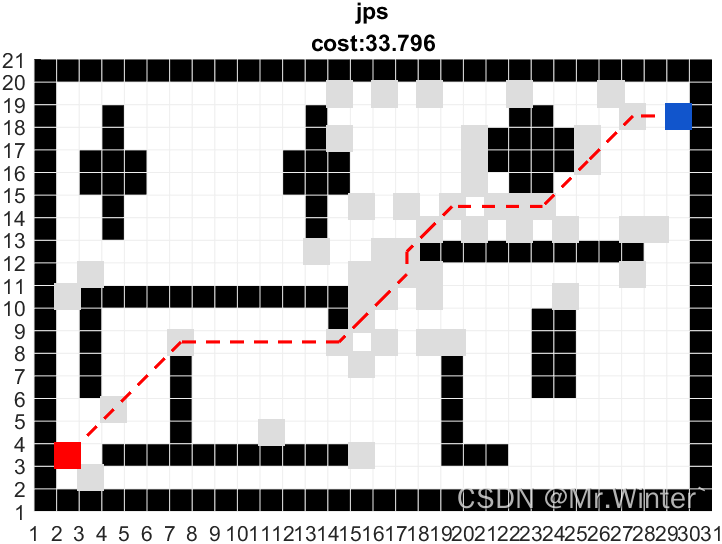
用一个实例说明。如图所示的栅格地图中,绿色是起点,红色是终点,黑色是障碍物

我们首先用A*算法看看规划的路径,其中绿色是开节点表中的节点,蓝色是闭节点表中的节点,黄色是规划路径

再用JPS算法执行路径规划,灰色的是在搜索过程中被跳过的点,而绿色节点就是跳点,实际应用于算法搜索中的节点(绿色和蓝色),与A*算法相比大幅度减少。

3 算法仿真与实现
3.1 算法流程
JPS算法的核心就是jump()函数,我采用递归方法来实现,使得整体代码量下降,且逻辑更清晰明确。总的思路就是实现跳点剪枝的三条策略
- 若节点 x x x是终点,则节点 x x x是跳点;
- 若节点 x x x存在至少一个强制邻点,则节点 x x x是跳点;
- 在斜向搜索时,若节点 x x x在水平或垂直分量上有跳点,则节点 x x x是跳点

跳点剪枝策略就是通过筛选跳点作为探索域,而忽略对搜索路径没有实质影响的冗余节点,实现大幅度降低计算复杂度的效果。JPS算法最大的优势是在障碍密集的情况下,相较传统A*算法的计算速度一般有量级的提升;缺陷是其不能应用于广义图搜索,只适用于栅格地图。
3.2 ROS C++实现
Node JumpPointSearch::jump(const Node& point, const Node& motion)
{
Node new_point = point + motion;
new_point.id_ = this->grid2Index(new_point.x_, new_point.y_);
new_point.pid_ = point.id_;
new_point.h_ = std::sqrt(std::pow(new_point.x_ - this->goal_.x_, 2) + std::pow(new_point.y_ - this->goal_.y_, 2));
// next node hit the boundary or obstacle
if (new_point.id_ < 0 || new_point.id_ >= this->ns_ || this->costs_[new_point.id_] >= this->lethal_cost_ * this->factor_)
return Node(-1, -1, -1, -1, -1, -1);
// goal found
if (new_point == this->goal_)
return new_point;
// diagonal
if (motion.x_ && motion.y_)
{
// if exists jump point at horizontal or vertical
Node x_dir = Node(motion.x_, 0, 1, 0, 0, 0);
Node y_dir = Node(0, motion.y_, 1, 0, 0, 0);
if (this->jump(new_point, x_dir).id_ != -1 || this->jump(new_point, y_dir).id_ != -1)
return new_point;
}
// exists forced neighbor
if (this->detectForceNeighbor(new_point, motion))
return new_point;
else
return this->jump(new_point, motion);
}

3.3 Python实现
def jump(self, node: Node, motion: Node):
# explore a new node
new_node = node + motion
new_node.parent = node.current
new_node.h = self.h(new_node, self.goal)
# hit the obstacle
if new_node.current in self.obstacles:
return None
# goal found
if new_node == self.goal:
return new_node
# diagonal
if motion.current[0] and motion.current[1]:
# if exists jump point at horizontal or vertical
x_dir = Node((motion.current[0], 0), None, 1, None)
y_dir = Node((0, motion.current[1]), None, 1, None)
if self.jump(new_node, x_dir) or self.jump(new_node, y_dir):
return new_node
# if exists forced neighbor
if self.detectForceNeighbor(new_node, motion):
return new_node
else:
return self.jump(new_node, motion)

3.4 Matlab实现
function [new_node, flag] = jump(cur_node, motion, goal, map)
flag = false;
% explore a new node
new_node = [cur_node(1) + motion(1), ...
cur_node(2) + motion(2), ...
cur_node(3) + motion(3), ...
0, cur_node(1), cur_node(2)
];
new_node(4) = h(new_node(1:2), goal);
% obstacle
if new_node(1) <= 0 || new_node(2) <= 0 || map(new_node(1), new_node(2)) == 2
return
end
% goal found
if new_node(1) == goal(1) && new_node(2) == goal(2)
flag = true;
return
end
% diagonal
if motion(1) && motion(2)
% if exists jump point at horizontal or vertical
x_dir = [motion(1), 0, 1];
y_dir = [0, motion(2), 1];
[~, flag_x] = jump(new_node, x_dir, goal, map);
[~, flag_y] = jump(new_node, y_dir, goal, map);
if flag_x || flag_y
flag = true;
return
end
end
% if exists forced neighbor
if detect_force(new_node, motion, map)
flag = true;
return
else
[new_node, flag] = jump(new_node, motion, goal, map);
return
end
end
完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …