从零开始 verilog 以太网交换机(三)MAC发送控制器的设计与实现
🔈声明:
😃博主主页:王_嘻嘻的CSDN主页
🧨 从零开始 verilog 以太网交换机系列专栏:点击这里
🔑未经作者允许,禁止转载,侵权必删
🚩关注本专题的朋友们可以收获一个经典交换机设计的全流程,包括设计与验证(FPGA);以太网MAC的基础知识。新手朋友们还将获得一个具有竞争力的项目经历,后续整个工程和代码下载链接也都会放在csdn和公众号内
本章将继续进行MAC发送端控制器的设计与实现,交换机完整的架构可以参考:从零开始 verilog 以太网交换机(一)架构分析。
1、MAC发送控制器功能
MAC发送控制器的功能和接收控制器对称,负责以太网的MAC -> PHY的数据交换,将数据帧转换为MII接口形式的数据流,并根据长度进行补零,计算CRC校验等。
其功能包括以下5点:
- 根据以太网规范,先发送前导码,再发送帧起始符(关于前导符和帧起始符的基础知识在第二章中有介绍:MAC接收控制器的设计与实现);
- 之后将Payload(有效荷载)从数据缓冲区读出,并发送;
- 若数据过短,需要填充数据‘0’,使MAC帧长度符合要求;
- 将同步计算的CRC-32校验值发送;
- 当MAC全部发送结束后,需要按照以太网规范插入帧间等待时间,本工程中为24个cycle(时钟周期);
2、MAC发送控制器接口
与接收控制器正好相反,MAC发送控制器一端连接数据缓冲区和状态缓冲区,另一端连接标准MII接口,具体接口如下。
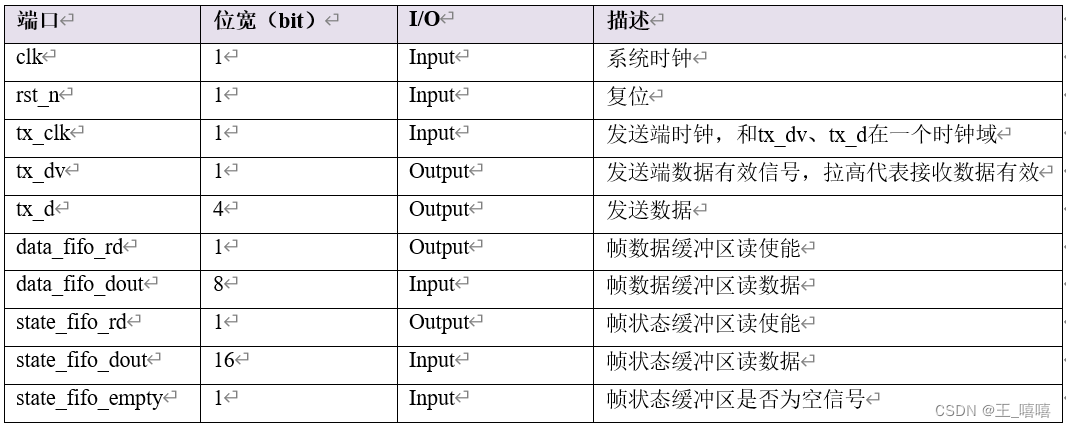
需要注意的是,系统时钟clk和MII发送端时钟tx_clk不同,tx_dv和tx_d需要在tx_clk下控制。
3、MAC发送控制器实现细节
发送控制器需要根据数据帧生成CRC-32校验值,通常CRC的多项式公式可以直接通过生成器来生成。(CRC生成器将放在本号的资源栏中,有需要的可以下载,或者关注博主的公众号,也有下载链接)
AFIFO的格式和结构都与接受控制器的相同,不了解的同学可以回看上一章内容:从零开始 verilog 以太网交换机(一)架构分析。
3.1、功能细节分析
- 检查state_fifo是否为空,若非空,则从state_fifo中取出一个数据,得到需要发送的MAC帧长度信息;
- 发送前导码’0101’(本工程内重复6次)和帧起始符4‘b1011;
- 将data_fifo数据取出发送到MII接口,并同步进行CRC-32的计算,当长度过小时进行填充处理;
- Payload发送完毕后,将CRC-32的计算值一并发送;
- MAC发送结束后,等待帧间隔时间后,继续发送下一帧;
3.3、MAC发送器核心电路设计
由于MAC发送控制器需要制造前导码,在帧尾填充数据,将交换机内部的8-bits数据转换成MII接口的4-bits数据,且系统时钟sys_clk和MII时钟tx_clk异步,所以在该模块中设置了一级用AFIFO实现的中间队列,既便于控制数据通路,又能处理异步时钟域。
所以发送控制器的总体架构如下:

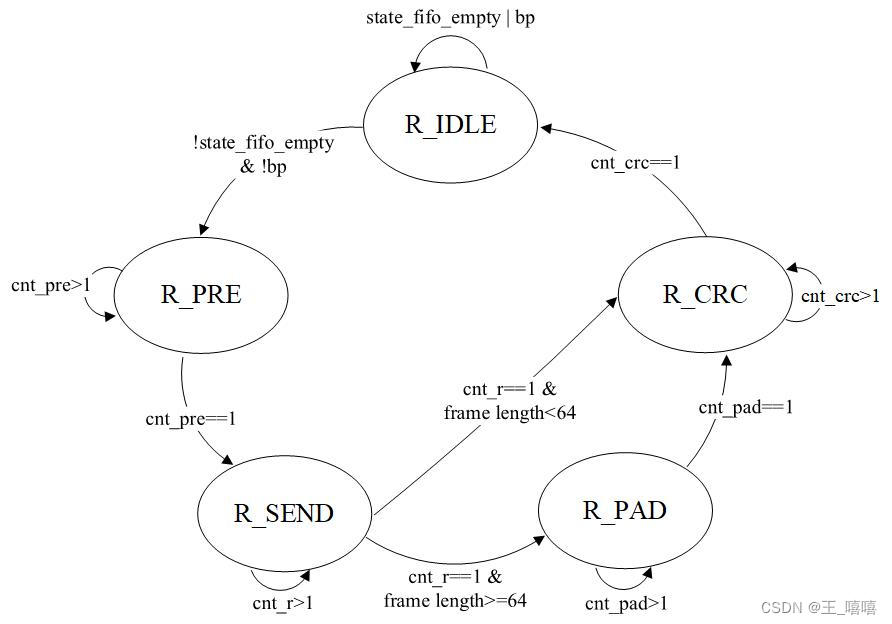
前级队列控制状态机负责接收交换机处理完的数据帧,并写入对应的中间队列internal_data_fifo和internal_state_fifo,在设计中前级状态机分为5个状态,R_IDLE、R_PRE、R_SEND、R_PAD和R_CRC,后四个状态分别负责向internal_data fifo存储前导码、Payload、填充‘0’和CRC校验值。
根据每个状态需要的字节数cnt_r控制状态的跳转,每当前级state fifo非空时,发起一次接收数据帧的处理,把封装好的完整帧存储在internal data fifo中,并在最后一拍更新internal state fifo内容。
而当internal data fifo不足以存放一个最大帧时(此最大帧需要包括前导码和CRC校验的字节数),前级队列状态机会反压输入,停止接收任何数据。
后级队列控制器负责将接收到的完整数据帧连续不断的发送到MII接口,同样也是通过状态机的形式控制internal fifo的输出逻辑。
后级队列控制相对容易,当internal state fifo非空时,取出实际长度数据,并按长度读取data fifo,每拍发送一个4-bits data到MII接口,发送完一个完整帧后,停止一段时间后继续开始检测下一数据帧是否准备完成。
3.4、MAC发送器代码
控制器的设计并不复杂,Verilog代码将放在下面,Testbench就不展示了,有需要的可以等专题结束后在资源中下载,或者去我的公众号获得链接。
module mac_t(
//system interface
input clk,
input rst_n,
//MII interface
input tx_clk,
output reg tx_dv,
output [3:0] tx_d,
//mac-r - interface mux
output reg data_fifo_rd,
input [7:0] data_fifo_dout,
output reg state_fifo_rd,
input [15:0] state_fifo_dout,
input state_fifo_empty
);
parameter BCNT_MAX = 1518;
parameter BCNT_MIN = 64;
parameter PRE_CNT = 7; //前导码数量
parameter CRC_CNT = 4; //4 byte crc code
parameter FRAME_WAIT_CNT = 24;
//前级接收数据帧的状态机
localparam R_IDLE = 5'b00001;
localparam R_PRE = 5'b00010;
localparam R_SEND = 5'b00100;
localparam R_PAD = 5'b01000;
localparam R_CRC = 5'b10000;
//缓存向MII发送数据帧的状态机
localparam T_IDLE = 3'b001;
localparam T_SEND = 3'b010;
localparam T_WAIT = 3'b100;
reg [4:0] cur_sta_r;
reg [4:0] next_sta_r;
reg [10:0] cnt_r; //内部计数器 记录还有多少byte需要发送 最大2k
//internal data fifo变量
reg [7:0] in_data_fifo_din;
reg in_data_fifo_wr;
reg in_data_fifo_rd;
wire [7:0] in_data_fifo_dout;
wire [11:0] in_data_fifo_wr_cnt;
//internal state fifo变量
reg [15:0] in_state_fifo_din;
reg in_state_fifo_wr;
wire in_state_fifo_rd;
wire [15:0] in_state_fifo_dout;
wire in_state_fifo_full;
wire in_state_fifo_empty;
wire bp; //反压信号,当internal fifo空间不够一个最大帧时,反压上级,拒绝接收一切数据
//crc 变量
reg crc_init;
wire crc_cal;
wire crc_vld;
wire [7:0] crc_dout;
wire [7:0] crc_din;
assign bp = (in_data_fifo_wr_cnt[11:0] > 4096-BCNT_MAX-PRE_CNT-1) | in_state_fifo_full;
assign crc_din[7:0] = in_data_fifo_din[7:0];
//后级状态机变量
reg [2:0] cur_sta_t;
reg [2:0] next_sta_t;
reg [11:0] cnt_t; //以半字节为单位
reg in_state_fifo_empty_dly;
//============================前级状态机=========================
always @(posedge clk or negedge rst_n)begin
if(!rst_n)
cur_sta_r[4:0] <= R_IDLE;
else
cur_sta_r[4:0] <= next_sta_r[4:0];
end
always @(*)begin
case(cur_sta_r[4:0])
R_IDLE: next_sta_r[4:0] = (!bp & !state_fifo_empty) ? R_PRE : R_IDLE; //IDLE态时 只有internal fifo空间足够 且 前级已有处理完的数据帧才能进入下一状态
R_PRE: next_sta_r[4:0] = (cnt_r[10:0]==11'b1) ? R_SEND : R_PRE; //发送完所有前导码和起始符后 进入下一状态
R_SEND: next_sta_r[4:0] = (cnt_r[10:0]==11'b1) ? ( state_fifo_dout[10:0]< BCNT_MIN-CRC_CNT ) ? R_PAD : R_CRC : R_SEND; //发送完所有数据帧 进入下一状态 cnt每一状态都会更新
R_PAD: next_sta_r[4:0] = (cnt_r[10:0]==11'b1) ? R_CRC : R_PAD; //完成所有填充 进入下一状态
R_CRC: next_sta_r[4:0] = (cnt_r[10:0]==11'b1) ? R_IDLE: R_CRC; //CRC校验需要4 cycle 结束后,将校验值填入 返回IDLE态
default: next_sta_r[4:0] = R_IDLE;
endcase
end
//cnt采样
always @(posedge clk or negedge rst_n)begin
if(!rst_n)
cnt_r[10:0] <= 11'b0;
else begin
case(cur_sta_r[4:0])
R_IDLE: cnt_r[10:0] <= PRE_CNT ;
R_PRE: cnt_r[10:0] <= cnt_r[10:0] > 11'b1 ? cnt_r[10:0] - 11'b1 : state_fifo_dout[10:0];
R_SEND: cnt_r[10:0] <= cnt_r[10:0] > 11'b1 ? cnt_r[10:0] - 11'b1 : (state_fifo_dout[10:0] < (BCNT_MIN-CRC_CNT)) ? BCNT_MIN-CRC_CNT-state_fifo_dout[10:0] : CRC_CNT;
R_PAD: cnt_r[10:0] <= cnt_r[10:0] > 11'b1 ? cnt_r[10:0] - 11'b1 : CRC_CNT;
R_CRC: cnt_r[10:0] <= cnt_r[10:0] - 11'b1;
default: cnt_r[10:0] <= 11'b0;
endcase
end
end
//==============crc var 控制================
always @(posedge clk or negedge rst_n)begin
if(!rst_n)
crc_init <= 1'b0;
else if(cur_sta_r[4:0]==R_IDLE && next_sta_r[4:0]==R_PRE)
crc_init <= 1'b1;
else
crc_init <= 1'b0;
end
assign crc_cal = cur_sta_r[4:0]==R_SEND | cur_sta_r[4:0]==R_PAD;
assign crc_vld = cur_sta_r[4:0]==R_SEND | cur_sta_r[4:0]==R_PAD | cur_sta_r[4:0]==R_CRC;
//=========================================
//out data fifo控制
always @(posedge clk or negedge rst_n)begin
if(!rst_n)
data_fifo_rd <= 1'b0;
else if(cur_sta_r[4:0]==R_PRE && cnt_r[10:0]==11'b1)
data_fifo_rd <= 1'b1;
else if(cur_sta_r[4:0]==R_SEND && cnt_r[10:0]==11'b1)
data_fifo_rd <= 1'b0;
end
//out state fifo控制
always @(posedge clk or negedge rst_n)begin
if(!rst_n)
state_fifo_rd <= 1'b0;
else if(cur_sta_r[4:0]==R_CRC && cnt_r[10:0]==11'b1)
state_fifo_rd <= 1'b1;
else
state_fifo_rd <= 1'b0;
end
//internal data fifo控制
always @(posedge clk or negedge rst_n)begin
if(!rst_n)
in_data_fifo_wr <= 1'b0;
else if(cur_sta_r[4:0]==R_IDLE)
in_data_fifo_wr <= 1'b0;
else if(next_sta_r[4:0]==R_PRE)
in_data_fifo_wr <= 1'b1;
end
always @(posedge clk or negedge rst_n)begin //TODO
if(!rst_n)
in_data_fifo_din[7:0] <= 8'h0;
else if(cur_sta_r[4:0]==R_IDLE)
in_data_fifo_din[7:0] <= 8'h55;
else if(cur_sta_r[4:0]==R_PRE && cnt_r[10:0]==11'd1)
in_data_fifo_din[7:0] <= 8'hd5;
else if(cur_sta_r[4:0]==R_SEND)
in_data_fifo_din[7:0] <= data_fifo_dout[7:0];
else if(cur_sta_r[4:0]==R_PAD)
in_data_fifo_din[7:0] <= 8'h0;
else if(cur_sta_r[4:0]==R_CRC)
in_data_fifo_din[7:0] <= crc_dout[7:0];
end
//internal state fifo控制
always @(posedge clk or negedge rst_n)begin
if(!rst_n)
in_state_fifo_wr <= 1'b0;
else if(cur_sta_r[4:0]==R_CRC && cnt_r[10:0]==11'b1)
in_state_fifo_wr <= 1'b1;
else
in_state_fifo_wr <= 1'b0;
end
always @(posedge clk or negedge rst_n)begin
if(!rst_n)
in_state_fifo_din[15:0] <= 16'b0;
else if(cur_sta_r[4:0]==R_CRC && cnt_r[10:0]==11'b1)
in_state_fifo_din[15:0] <= state_fifo_dout[15:0];
else
in_state_fifo_din[15:0] <= 16'b0;
end
//==========================================================================
//=================================后级状态机===============================
always @(posedge tx_clk or negedge rst_n)begin
if(!rst_n)
cur_sta_t[2:0] <= T_IDLE;
else
cur_sta_t[2:0] <= next_sta_t[2:0];
end
always @(posedge tx_clk or negedge rst_n)begin //打一拍 为了in state fifo read over, fsm enter next state
if(!rst_n)
in_state_fifo_empty_dly <= 1'b1;
else
in_state_fifo_empty_dly <= in_state_fifo_empty;
end
always @(*)begin
case(cur_sta_t[2:0])
T_IDLE: next_sta_t[2:0] = !in_state_fifo_empty_dly ? T_SEND : T_IDLE;
T_SEND: next_sta_t[2:0] = cnt_t[11:0]==12'b1 ? T_WAIT : T_SEND;
T_WAIT: next_sta_t[2:0] = cnt_t[11:0]==12'b1 ? T_IDLE : T_WAIT;
default:next_sta_t[2:0] = T_IDLE;
endcase
end
//发送状态时 cnt采样
always @(posedge tx_clk or negedge rst_n)begin
if(!rst_n)
cnt_t[11:0] <= 12'b0;
else begin
case(cur_sta_t[2:0])
T_IDLE: cnt_t[11:0] <= !in_state_fifo_empty_dly ? (in_state_fifo_dout[10:0]+PRE_CNT+CRC_CNT)<<1'b1 : 12'b0;
T_SEND: cnt_t[11:0] <= cnt_t[11:0]==12'b1 ? FRAME_WAIT_CNT : cnt_t[11:0] - 12'b1;
T_WAIT: cnt_t[11:0] <= cnt_t[11:0] - 12'b1;
default: cnt_t[11:0] <= 12'b0;
endcase
end
end
//internal state fifo 控制
assign in_state_fifo_rd = cur_sta_t[2:0]==T_IDLE & !in_state_fifo_empty;
//internal data fifo 控制
always @(posedge tx_clk or negedge rst_n)begin //fifo dout需要提前读取后,dout上才有数据,并不是数据先在总线上
if(!rst_n)
in_data_fifo_rd <= 1'b0;
else if( (cur_sta_t[2:0]==T_IDLE & !in_state_fifo_empty) | (cur_sta_t[2:0]==T_SEND & cnt_t[0]) )
in_data_fifo_rd <= 1'b1;
else
in_data_fifo_rd <= 1'b0;
end
//MII接口控制
always @(posedge tx_clk or negedge rst_n)begin
if(!rst_n)
tx_dv <= 1'b0;
else if(cur_sta_t[2:0]==T_SEND)
tx_dv <= 1'b1;
else
tx_dv <= 1'b0;
end
assign tx_d[3:0] = cnt_t[0] ? in_data_fifo_dout[3:0] : in_data_fifo_dout[7:4];
data_fifo
x_internal_data_fifo(
.rst(~rst_n),
.wr_clk(clk),
.rd_clk(tx_clk),
.din(in_data_fifo_din[7:0]),
.wr_en(in_data_fifo_wr),
.rd_en(in_data_fifo_rd),
.dout(in_data_fifo_dout[7:0]),
.full(),
.empty(),
.rd_data_count(),
.wr_data_count(in_data_fifo_wr_cnt[11:0])
);
state_fifo
x_internal_state_fifo(
.rst(~rst_n),
.wr_clk(clk),
.rd_clk(tx_clk),
.din(in_state_fifo_din[15:0]),
.wr_en(in_state_fifo_wr),
.rd_en(in_state_fifo_rd),
.dout(in_state_fifo_dout[15:0]),
.full(in_state_fifo_full),
.empty(in_state_fifo_empty)
);
crc32 x_crc32(
.clk(clk),
.rst_n(rst_n),
.data(crc_din[7:0]),
.init(crc_init),
.cal(crc_cal),
.vld(crc_vld),
.crc_reg(),
.crc(crc_dout[7:0])
);
endmodule
搜索关注我的微信公众号【IC墨鱼仔】,获取我的更多IC干货分享!



![[SSD科普之2] SATA、mSATA、M.2、M.2(NVMe)、PCIE固态硬盘接口详解](https://img-blog.csdnimg.cn/img_convert/b64ffa9ac2b249c8a41c8b4c3e70b1ec.png)