使用的版本
- https://github.com/ultralytics/yolov5/tree/v5.0
安装onnx
torch.onnx.export(model, img, f, verbose=False, opset_version=12, input_names=['images'],
output_names=['classes', 'boxes'] if y is None else ['output'],
dynamic_axes={'images': {0: 'batch', 2: 'height', 3: 'width'}, # size(1,3,640,640)
'output': {0: 'batch', 2: 'y', 3: 'x'}} if opt.dynamic else None)
opset_version=12,安装对应版本的onnx
:~/Documents/pachong/yolov5$ pip install onnx==1.12.0
Collecting onnx==1.12.0
Downloading onnx-1.12.0-cp37-cp37m-manylinux_2_17_x86_64.manylinux2014_x86_64.whl (13.1 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 13.1/13.1 MB 32.9 kB/s eta 0:00:00
Requirement already satisfied: numpy>=1.16.6 in /home/pdd/anaconda3/envs/yolo/lib/python3.7/site-packages (from onnx==1.12.0) (1.21.6)
Requirement already satisfied: typing-extensions>=3.6.2.1 in /home/pdd/anaconda3/envs/yolo/lib/python3.7/site-packages (from onnx==1.12.0) (4.4.0)
WARNING: Retrying (Retry(total=4, connect=None, read=None, redirect=None, status=None)) after connection broken by 'ProtocolError('Connection aborted.', ConnectionResetError(104, '连接被对方重设'))': /simple/protobuf/
Collecting protobuf<=3.20.1,>=3.12.2
Downloading protobuf-3.20.1-cp37-cp37m-manylinux_2_5_x86_64.manylinux1_x86_64.whl (1.0 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 1.0/1.0 MB 26.1 kB/s eta 0:00:00
Installing collected packages: protobuf, onnx
Attempting uninstall: protobuf
Found existing installation: protobuf 3.20.3
Uninstalling protobuf-3.20.3:
Successfully uninstalled protobuf-3.20.3
Attempting uninstall: onnx
Found existing installation: onnx 1.13.0
Uninstalling onnx-1.13.0:
Successfully uninstalled onnx-1.13.0
ERROR: pip's dependency resolver does not currently take into account all the packages that are installed. This behaviour is the source of the following dependency conflicts.
tensorboard 2.10.1 requires protobuf<3.20,>=3.9.2, but you have protobuf 3.20.1 which is incompatible.
Successfully installed onnx-1.12.0 protobuf-3.20.1
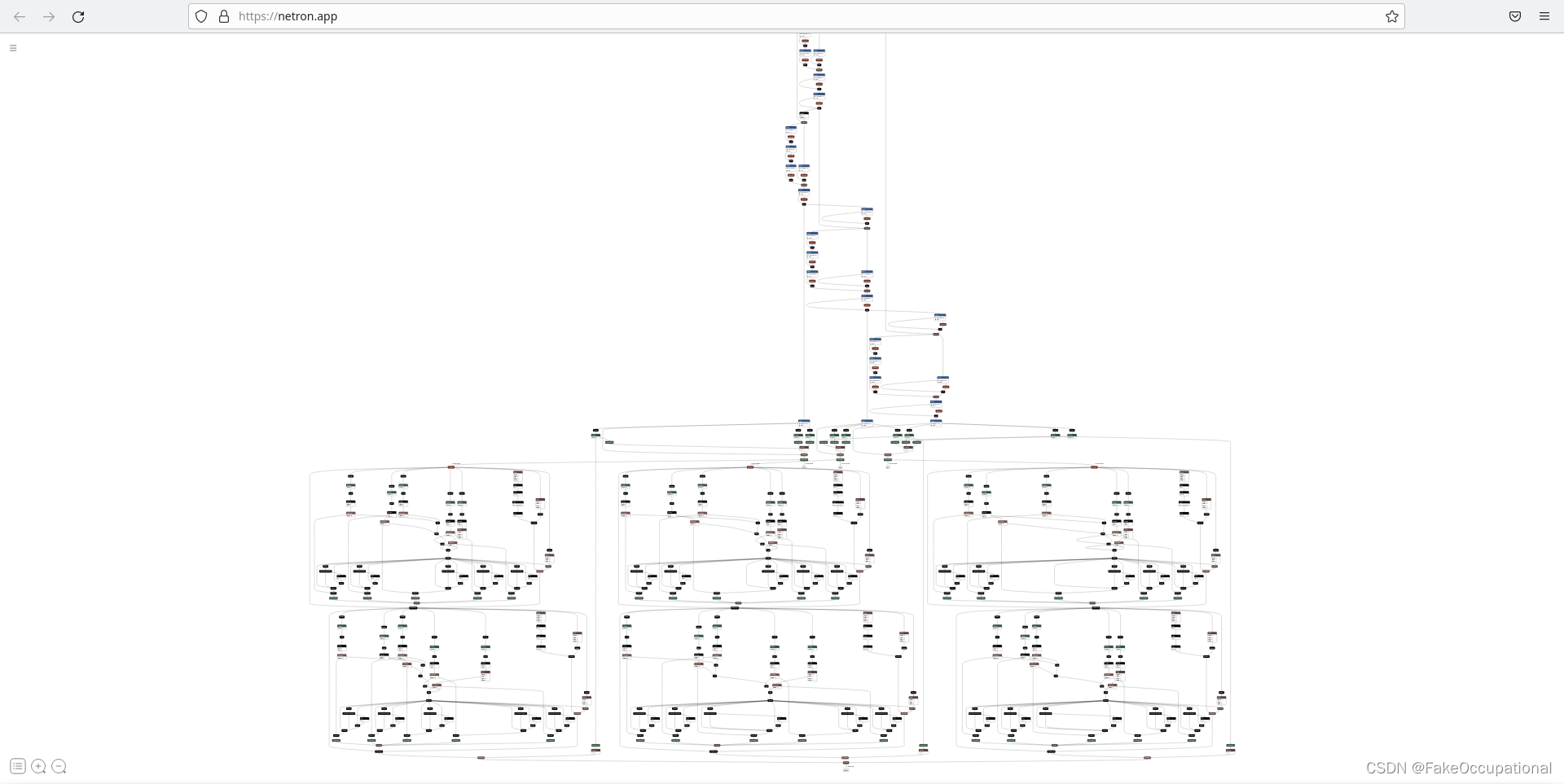
export model
python ./models/export.py --weights ./weights/yolov5s.pt --img 640 --batch 1
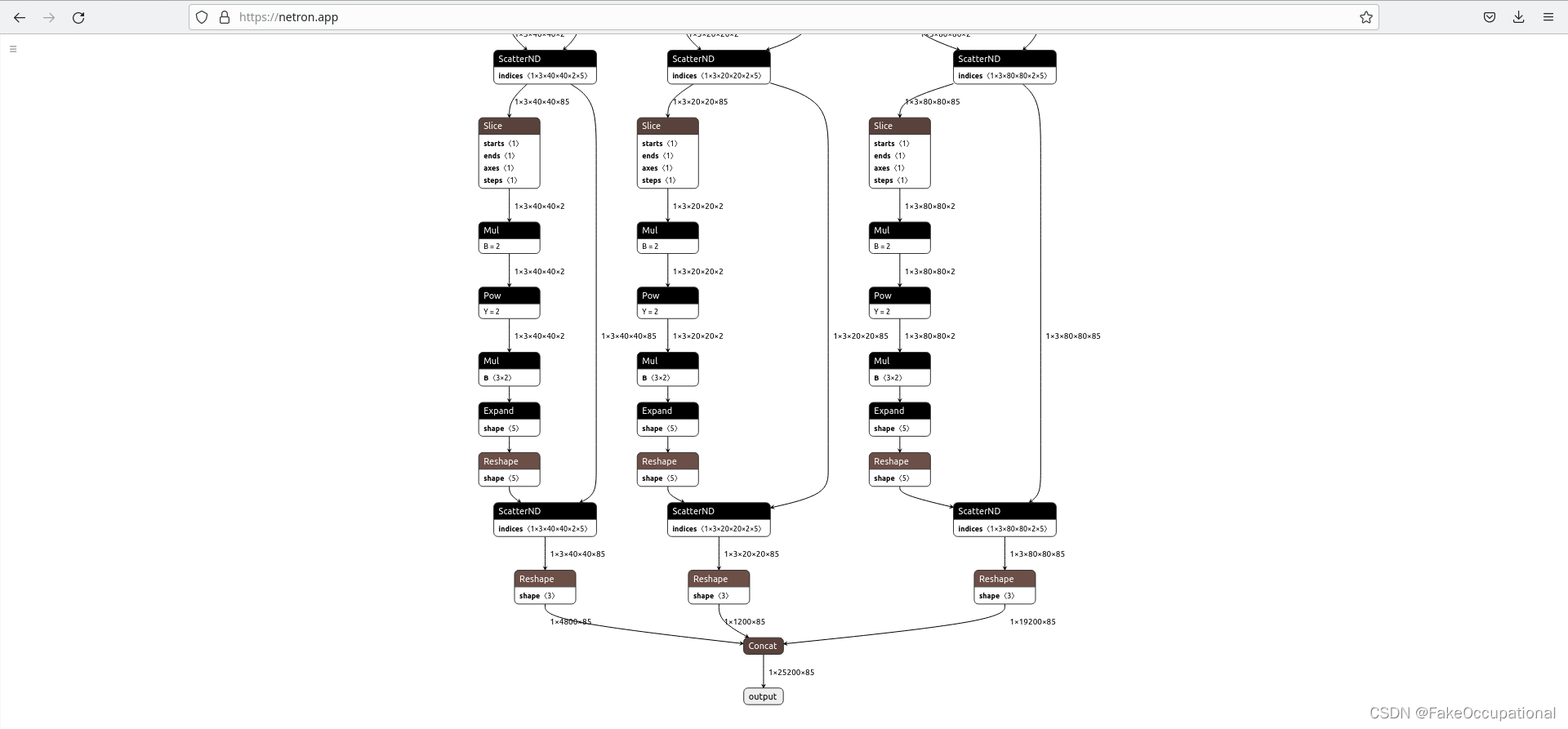
When given a 640x640 input image, the model outputs the following 3 tensors.
// https://medium.com/axinc-ai/yolov5-the-latest-model-for-object-detection-b13320ec516b
(1, 3, 80, 80, 85) # anchor 0
(1, 3, 40, 40, 85) # anchor 1
(1, 3, 20, 20, 85) # anchor 2
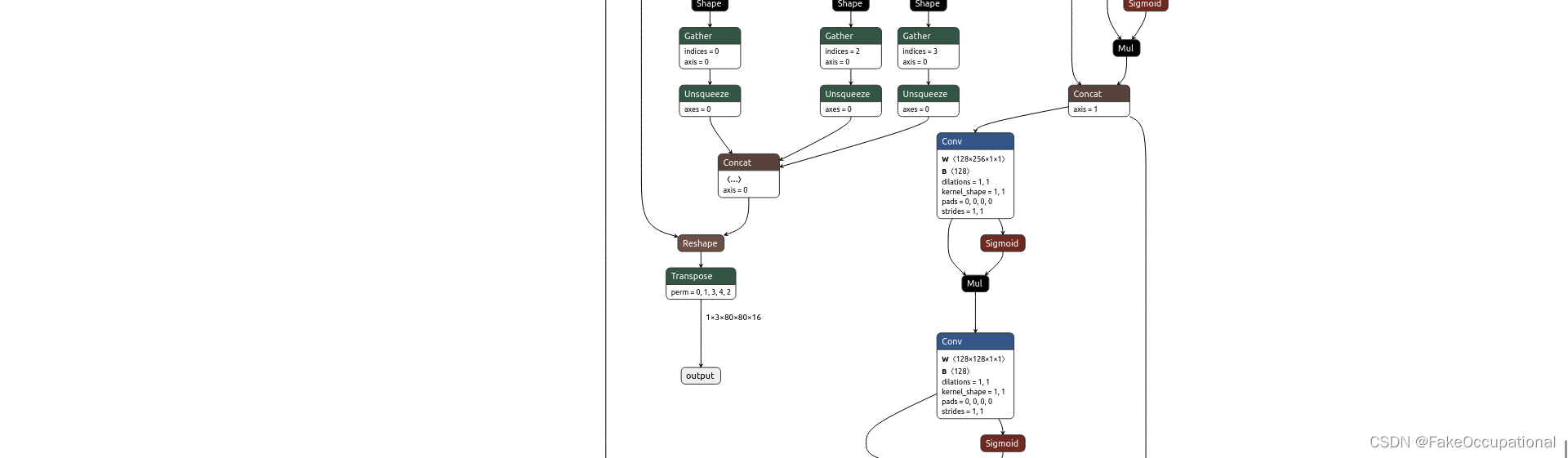
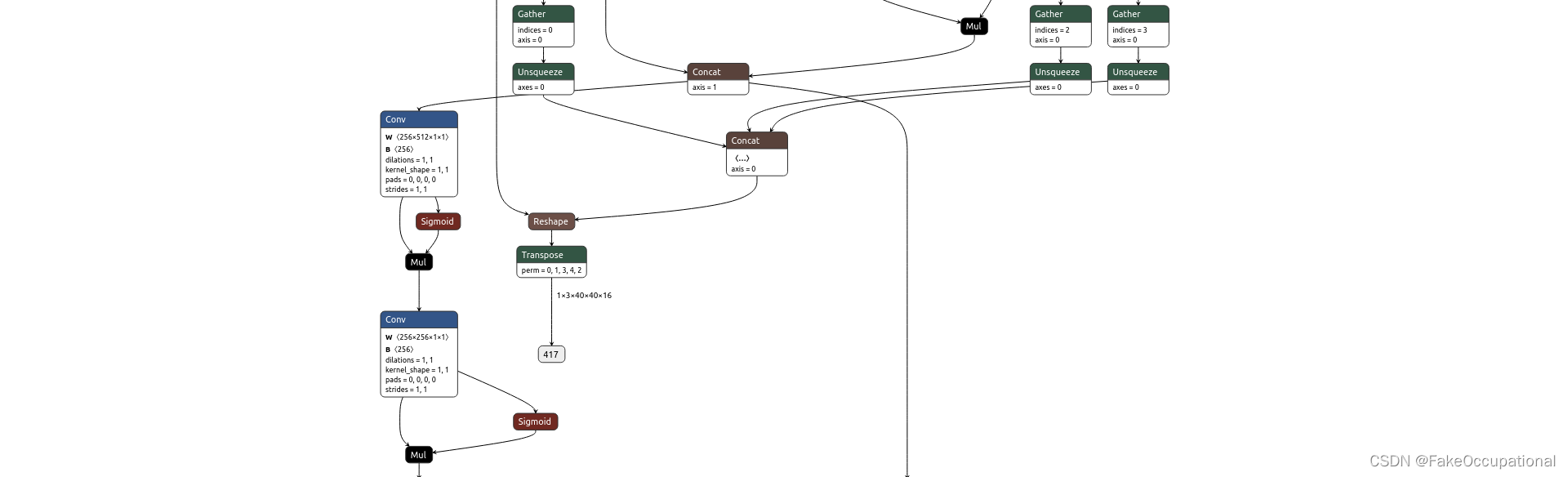
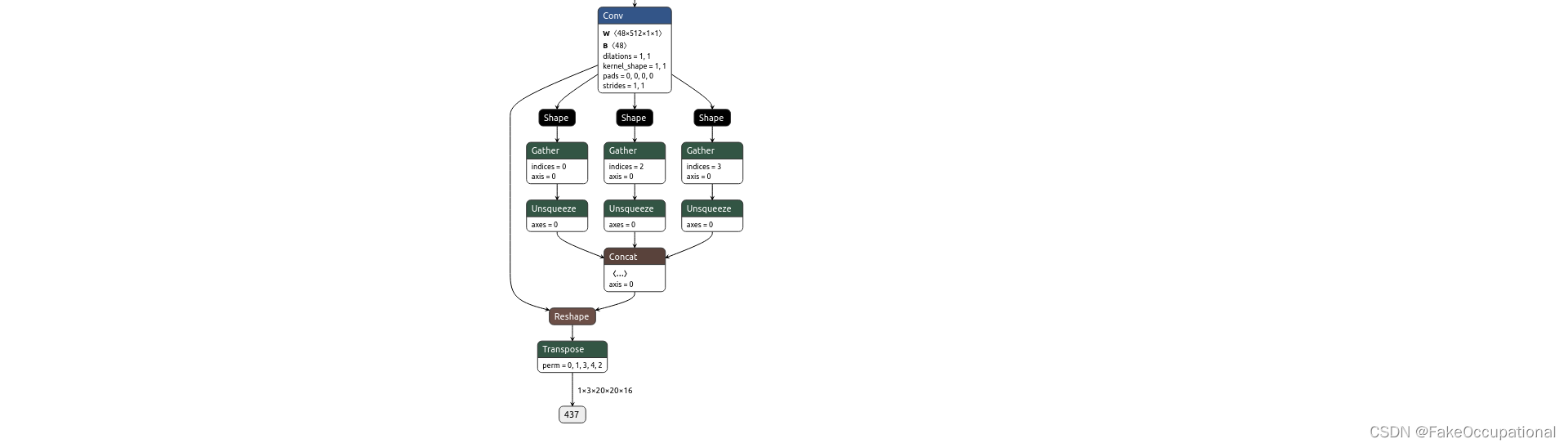
YOLOv5 输出网格被展平并连接以形成单个输出
python ./models/export.py --weights ./weights/yolov5s.pt --img 640 --batch 1 --grid
gird 起作用的位置
# Input
img = torch.zeros(opt.batch_size, 3, *opt.img_size).to(device) # image size(1,3,320,192) iDetection
# Update model
for k, m in model.named_modules():
m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility
if isinstance(m, models.common.Conv): # assign export-friendly activations
if isinstance(m.act, nn.Hardswish):
m.act = Hardswish()
elif isinstance(m.act, nn.SiLU):
m.act = SiLU()
# elif isinstance(m, models.yolo.Detect):
# m.forward = m.forward_export # assign forward (optional)
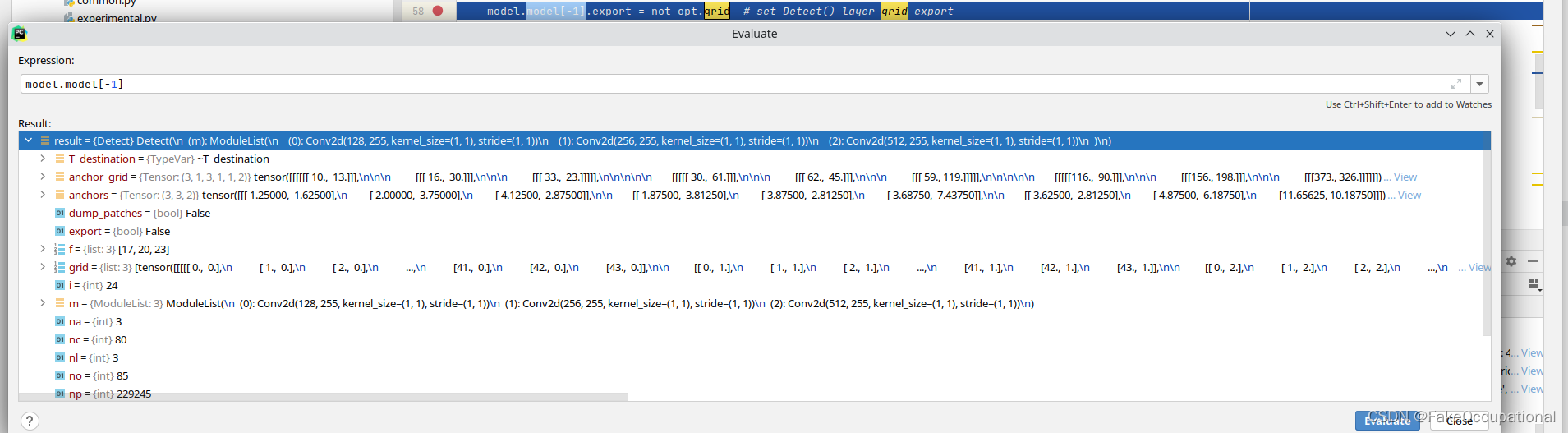
model.model[-1].export = not opt.grid # set Detect() layer grid export
y = model(img) # dry run
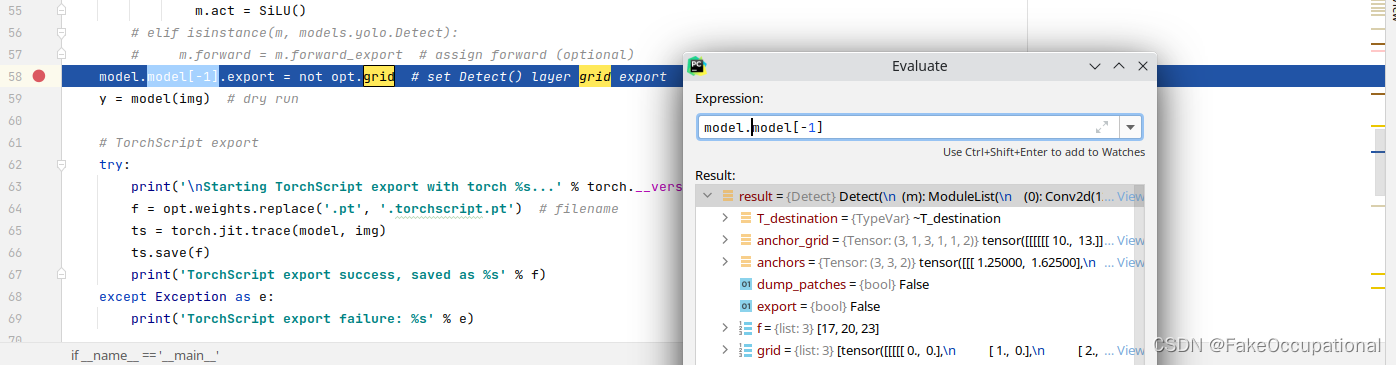
detect独有属性export
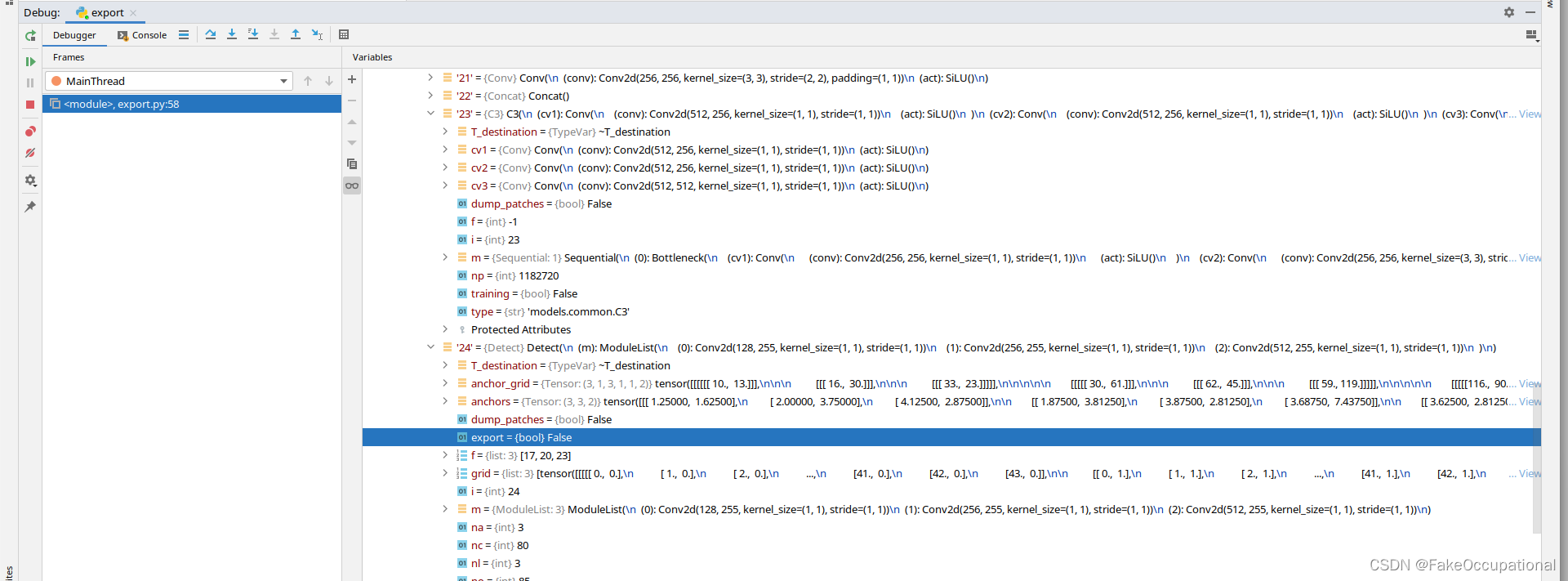
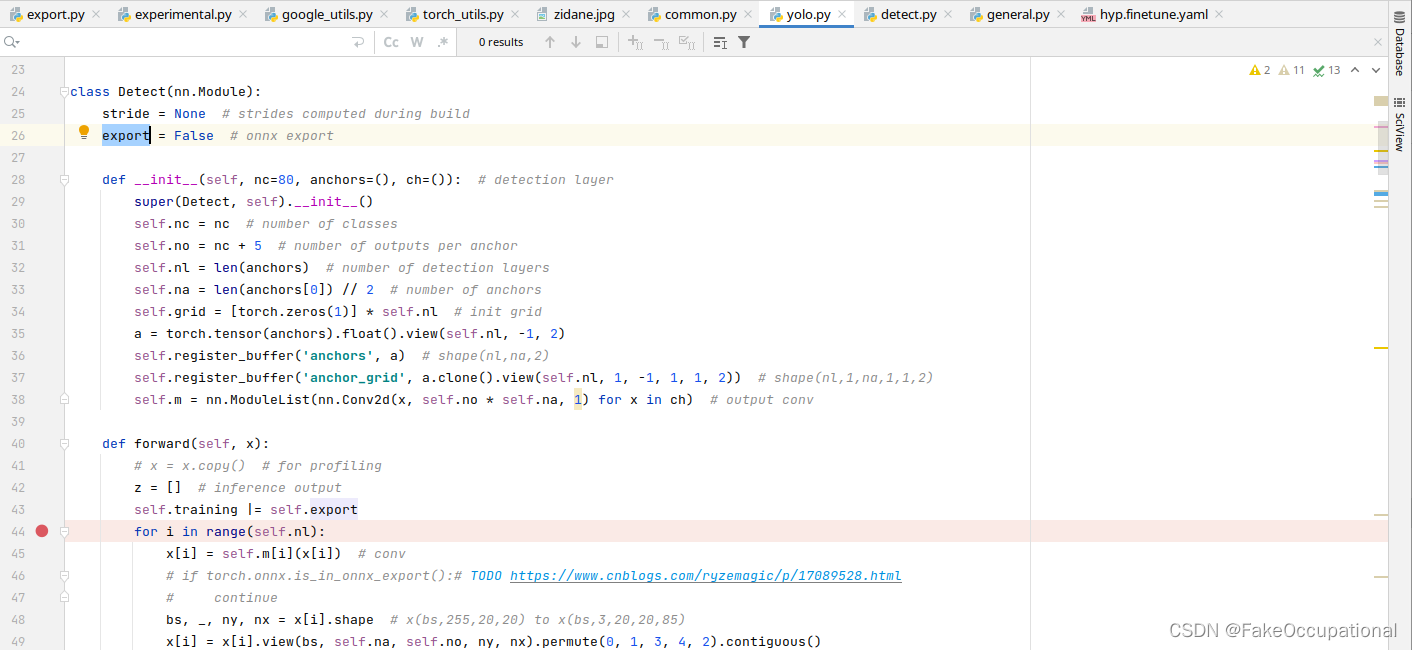
class Detect(nn.Module):
stride = None # strides computed during build
export = ** # onnx export
def __init__(self, nc=80, anchors=(), ch=()): # detection layer
super(Detect, self).__init__()
self.nc = nc # number of classes
self.no = nc + 5 # number of outputs per anchor
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors
self.grid = [torch.zeros(1)] * self.nl # init grid
a = torch.tensor(anchors).float().view(self.nl, -1, 2)
self.register_buffer('anchors', a) # shape(nl,na,2)
self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
其他细节
class Focus(nn.Module):
# Focus wh information into c-space
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
super(Focus, self).__init__()
self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
# self.contract = Contract(gain=2)
# def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
# return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
# # return self.conv(self.contract(x))
def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
if torch.onnx.is_in_onnx_export():# TODO
a, b = x[..., ::2, :].transpose(-2, -1), x[..., 1::2, :].transpose(-2, -1)
c = torch.cat([a[..., ::2, :], b[..., ::2, :], a[..., 1::2, :], b[..., 1::2, :]], 1).transpose(-2, -1)
return self.conv(c)
else:
return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
simplifier
- 但我其实没有用这个,因为我安装这个后再次导出onnx出现了问题
- https://github.com/daquexian/onnx-simplifier
pip install onnx-simplifier -i https://pypi.tuna.tsinghua.edu.cn/simplepython -m onnxsim ./weights/yolov5s.onnx ./weights/yolov5.onnx
使用带有 --grid 错误的 ONNX Simplifier 导出 https://github.com/ultralytics/yolov5/issues/2558
python ./models/export.py --weights ./weights/best.pt --img 640 --batch 1 https://www.cnblogs.com/ryzemagic/p/17089528.html
CG
-
python models/export.py --grid --simplifyhttps://github.com/ultralytics/yolov5/issues/1597 -
b[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image) RuntimeError: a view of a leaf Variable that requires grad is being used in an in-place operation.https://blog.csdn.net/zhangxiangweide/article/details/125781044 -
如何将YOLOV5 训练好的模型部署 输出?
-
看到很多博客都用了这篇 https://huggingface.co/spaces/darylfunggg/xray-hand-joint-detection/blob/main/yolov5/export.py
-
ultralytics/yolov3: v9.6.0 - YOLOv5 v6.0 发布 YOLOv3 兼容性更新
first of all, onnx-simplifier need to be installed with pip install onnx-simplifier,
then, the simplification codes are:
# ONNX export
try:
import onnx
from onnxsim import simplify
print('\nStarting ONNX export with onnx %s...' % onnx.__version__)
f = opt.weights.replace('.pt', '.onnx') # filename
torch.onnx.export(model, img, f, verbose=False, opset_version=12, input_names=['images'],
output_names=['output'] if y is None else ['output'])
# Checks
onnx_model = onnx.load(f) # load onnx model
model_simp, check = simplify(onnx_model)
assert check, "Simplified ONNX model could not be validated"
onnx.save(model_simp, f)
# print(onnx.helper.printable_graph(onnx_model.graph)) # print a human readable model
print('ONNX export success, saved as %s' % f)
except Exception as e:
print('ONNX export failure: %s' % e)
class Detect(nn.Module):
stride = None # strides computed during build
export = False # onnx export
def __init__(self, nc=80, anchors=(), ch=()): # detection layer
super(Detect, self).__init__()
self.nc = nc # number of classes
self.no = nc + 5 # number of outputs per anchor
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors
self.grid = [torch.zeros(1)] * self.nl # init grid
a = torch.tensor(anchors).float().view(self.nl, -1, 2)
self.register_buffer('anchors', a) # shape(nl,na,2)
self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
def forward(self, x):
# x = x.copy() # for profiling
z = [] # inference output
self.training |= self.export
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.grid[i].shape[2:4] != x[i].shape[2:4]:
self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
y = x[i].sigmoid()
y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
z.append(y.view(bs, -1, self.no))
return x if self.training else (torch.cat(z, 1), x)







![[python入门㊽] - 自定义异常 raise 关键字](https://img-blog.csdnimg.cn/21440859a8fa45babbe2c453e888206c.png)


![[安装之2] 台式计算机加固态硬盘,台式机添加固态硬盘教程_台式主机固态硬盘怎么安装](https://img-blog.csdnimg.cn/img_convert/7584f95698dd42feac670cce36263797.jpeg)