遥感数字图像处理
来源:慕课北京师范大学朱文泉老师的课程
遥感应用:遥感制图、信息提取
短期内了解知识结构–>有选择的剖析经典算法原理–>系统化知识结构、并尝试实践应用
跳出算法(尤其是数学公式)
关注原理及解决问题的思路
遥感数字图像处理
- 遥感数字图像处理
- 一、数字图像基础
- 二、常见遥感图像文件存储格式
- 三、空间域处理方法
- 3.2 数值运算
- 3.2.1 单波段点运算
- 3.2.2单波段领域运算
- 3.2.3 多波段运算
- 3.3 集合运算
- 3.3.1空间操作
- 3.3.2波段操作
- 3.4 逻辑运算
- 3.5 数学形态学运算
- 3.5.1 腐蚀
- 3.5.2 膨胀
- 3.5.3二值形态学
- 3.5.4 灰度形态学腐蚀膨胀
- 四、变换域处理方法
- 4.2主成分变换
- 4.3最小噪声分离变换
- 4.4缨帽变换
- 4.5 傅里叶变换
- 4.6 小波变换
- 4.7 颜色空间变换
- 4.7.1CMYK颜色空间
- 4.7.2 HSI颜色空间
- 4.7.3 颜色空间的相互转换
- 第五章 辐射校正
- 5.1辐射校正概述
- 5.2 传感器校正
- 5.3 大气校正
- 5.3.1大气校正统计模型
- 5.3.2 大气校正物理模型
- 5.4 地形及太阳高度角校正
- 5.4.1 余弦校正(地形)
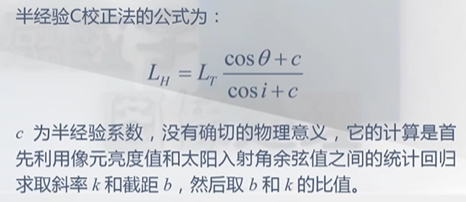
- 5.4.2 半经验校正(地形)
- 5.4.3 太阳高度角校正(太阳)
- 第六章 几何校正
- 6.1 遥感图像的几何变形
- 6.2 遥感图像的几何校正
- 6.2.1几何精校正的过程与方法:
- 第七章 图像去噪声
- 7.1 噪声分类
- 7.3空间域去噪声
- 7.3.1均值滤波
- 7.3.2 中值滤波
- 7.3.3边缘保持平滑滤波
- 7.3.4数学形态学去噪
- 7.4变换域去噪声
- 7.4.1 傅里叶变换去噪声
- 7.4.2 小波变换去噪声
- 第八章图像增强
- 8.1 空间域图像增强
- 8.1.1变换增强
- 8.1.2 直方图调整图像增强
- 8.1.3 反锐化增强
- 8.2 变换域图像增强
- 8.3伪彩色处理
- 8.4图像融合
- 第9章 感兴趣目标及对象提取
- 9.1 图像分割
- 9.1.1阈值分割法
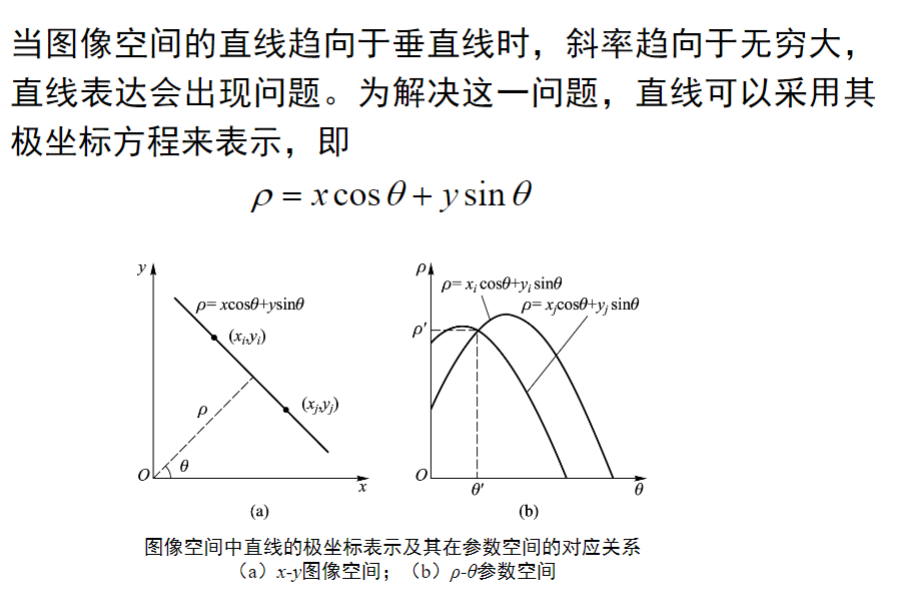
- 9.1.2 边界分割法
- 9.1.3 区域提取分割法
- 9.1.4 形态学分水岭分割
- 9.2 二值图像处理
- 9.2.1四近邻与八近邻
- 9.2.2四连通和八连通
- 9.2.3内部点与边界点
- 9.2.4 空洞点填补和碎块消除
- 9.3 对象提取
- 9.2.3内部点与边界点
- 9.2.4 空洞点填补和碎块消除
- 9.3 对象提取
一、数字图像基础
数字图像类型:
黑白图像:二值图像,灰度值要么是0要么是1
灰度图像:RGB三个通道的值是相同的,(128,128,128)表示灰色,(255,255,255)表示白色
伪彩色图像:也是单波段图像,只是每个灰度值对应于颜色空间模型中的某一种颜色。R、G、B值是三个不完全相同的数值,表现为彩色。(255,0,0)红色
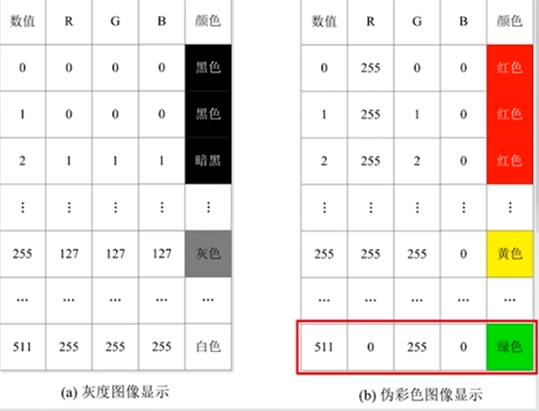
伪彩色单波段,假彩色三波段
标准假彩色图像:近红外波段、红光波段、绿光波段(4、3、2)

统计并查看直方图

实验二:波段运算-计算VDVI
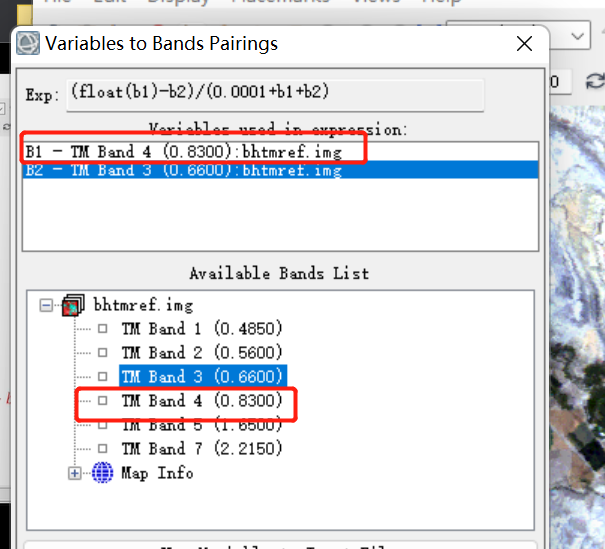
打开波段运算框
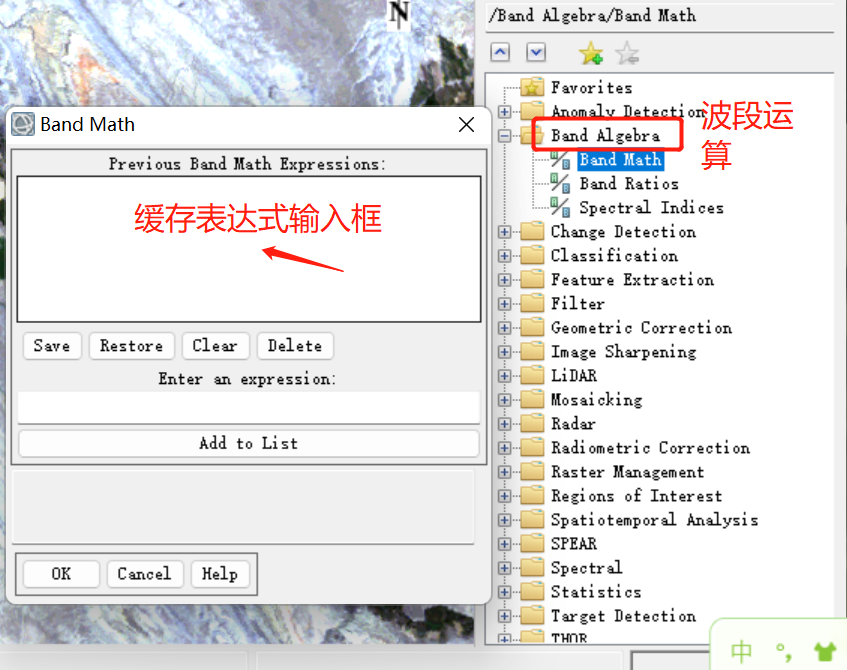
原始数据为Byte型,波段数据有小数,为了避免出错,将数据变为float浮点型。为了避免分母为0,避免出错,在分母前加一个极小值。
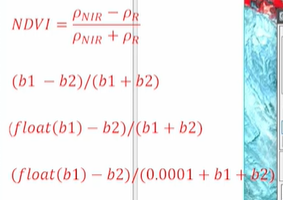
输入公式进入赋值阶段,b1对应近红外波段,b2对应红光波段
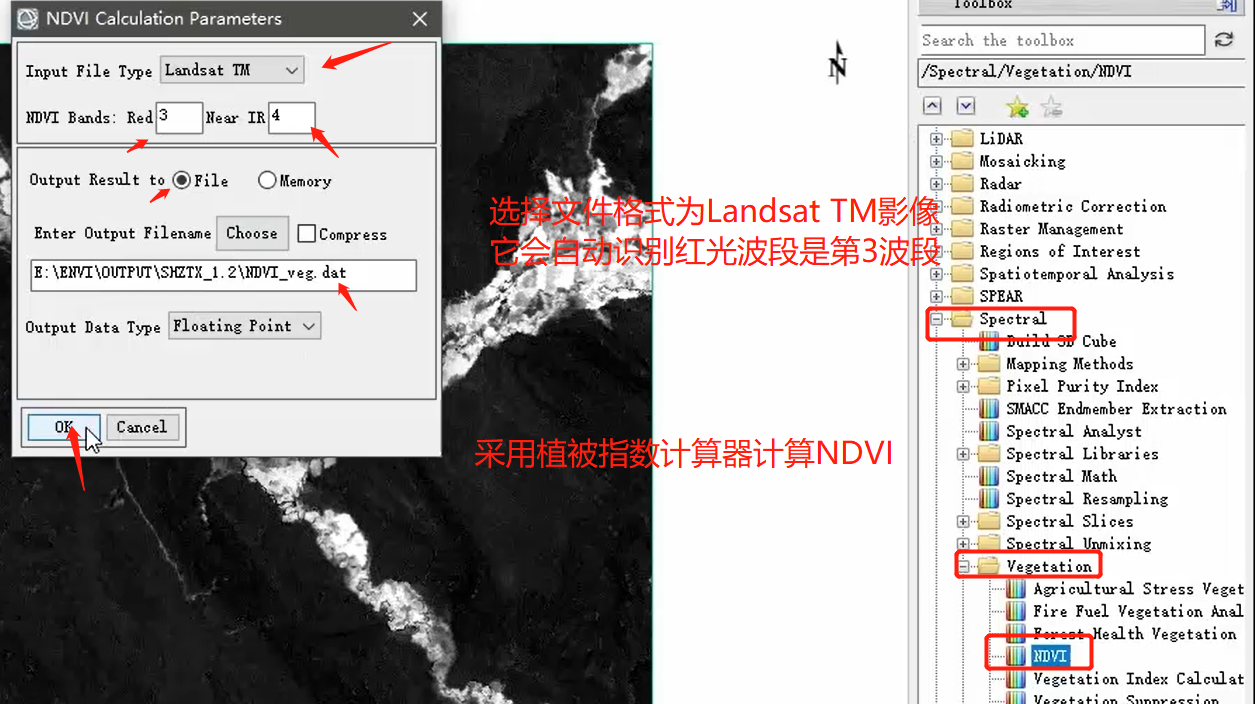
采用植被指数计算器计算VDVI
二、常见遥感图像文件存储格式
开放式:有两个文件(头文件+数据文件)
封装式存储格式:jpeg格式、tiff格式、bmp格式
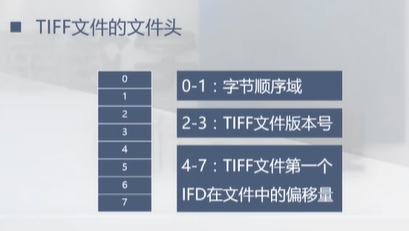
tiff格式:文件头、标识信息区、图像数据区
偏移量–>类似于指针,标识具体位置的地方
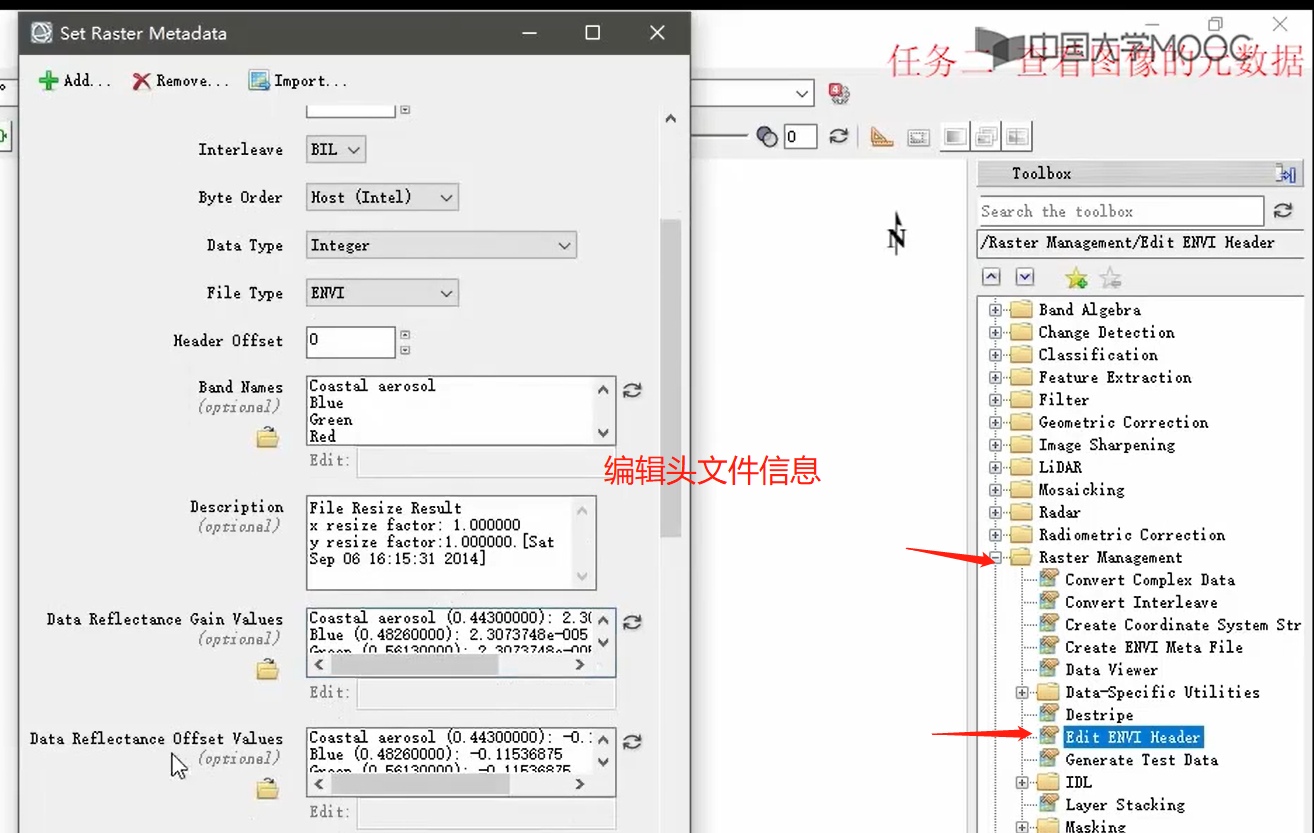
查看图像的头文件信息
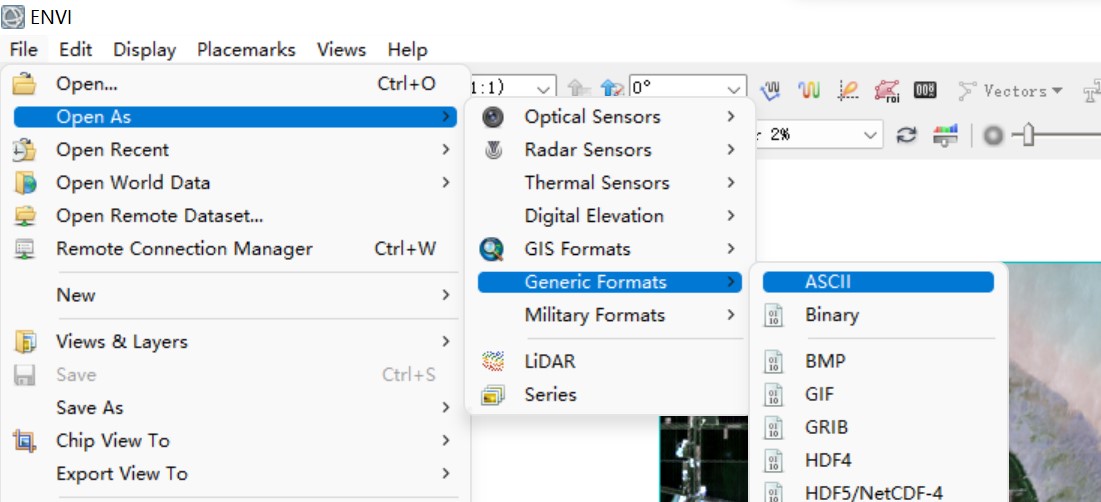
打开ASCII码数据格式的文件
封装式二进制遥感图像的读取

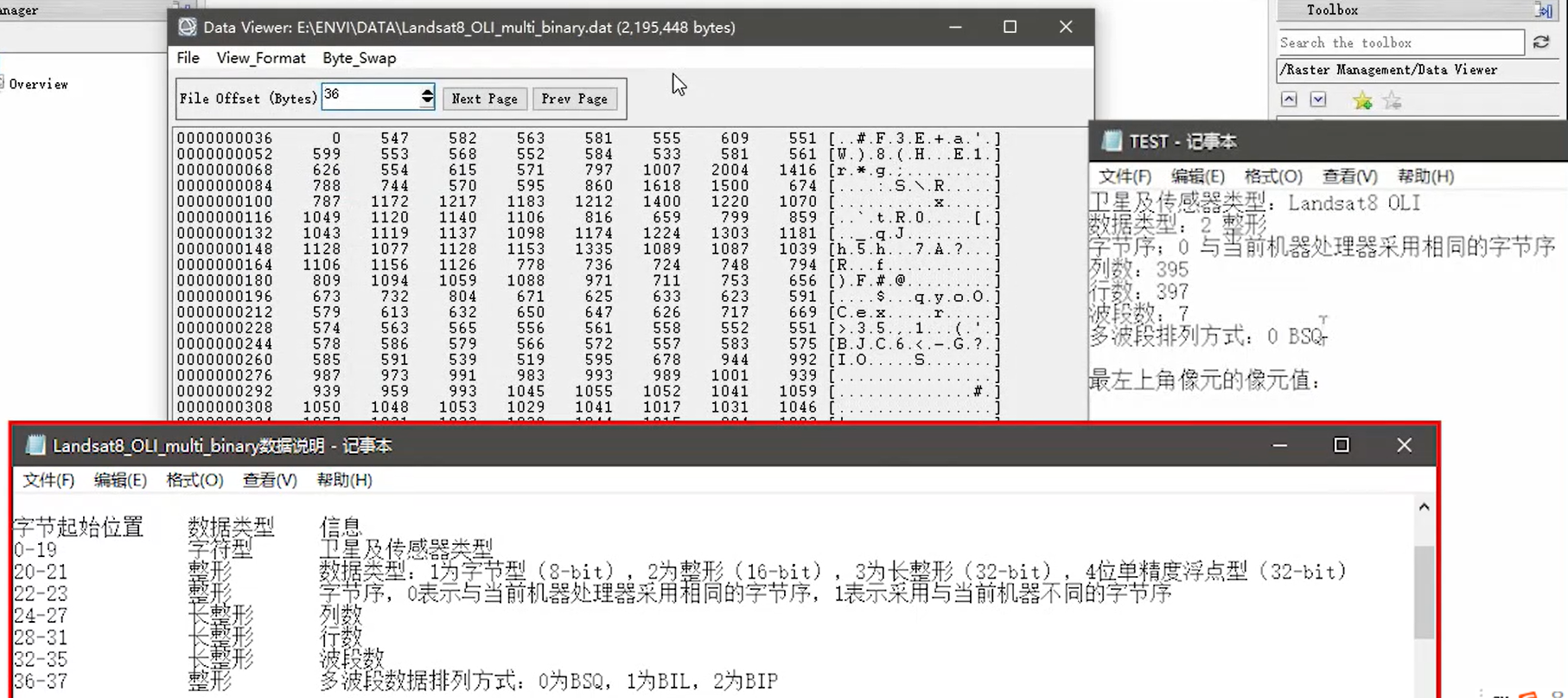
先用右侧工具箱中的DataViewer打开二进制文件,如中间那图所示,再根据数据说明,输入字节起始位置,在View_Format选择对应的数据类型,就可以看到头文件对应的信息。
三、空间域处理方法
3.2 数值运算
3.2.1 单波段点运算
输入是单个像元的数值,输出也是单个数值,只是经过了一个函数,没有改变空间信息
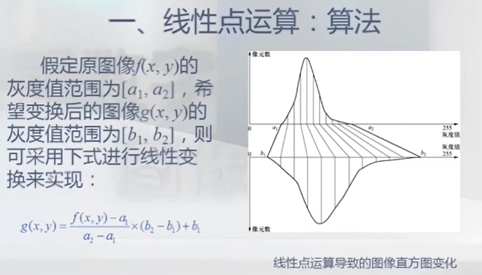
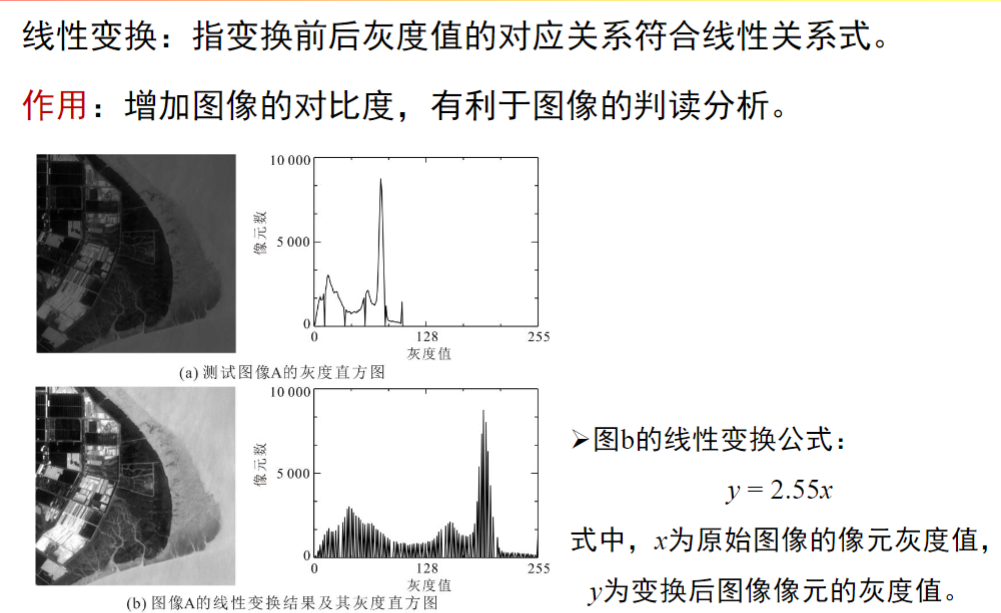
线性点运算的应用:
用于图像的增强,将灰度值范围进行拉伸拓展,那么图像的细节信息就比较明显了。
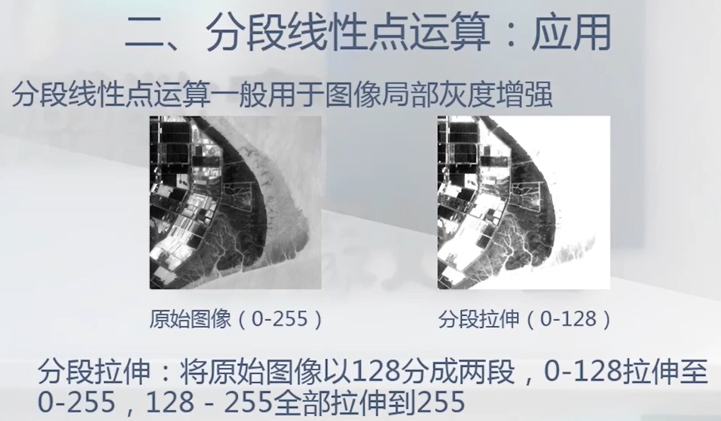
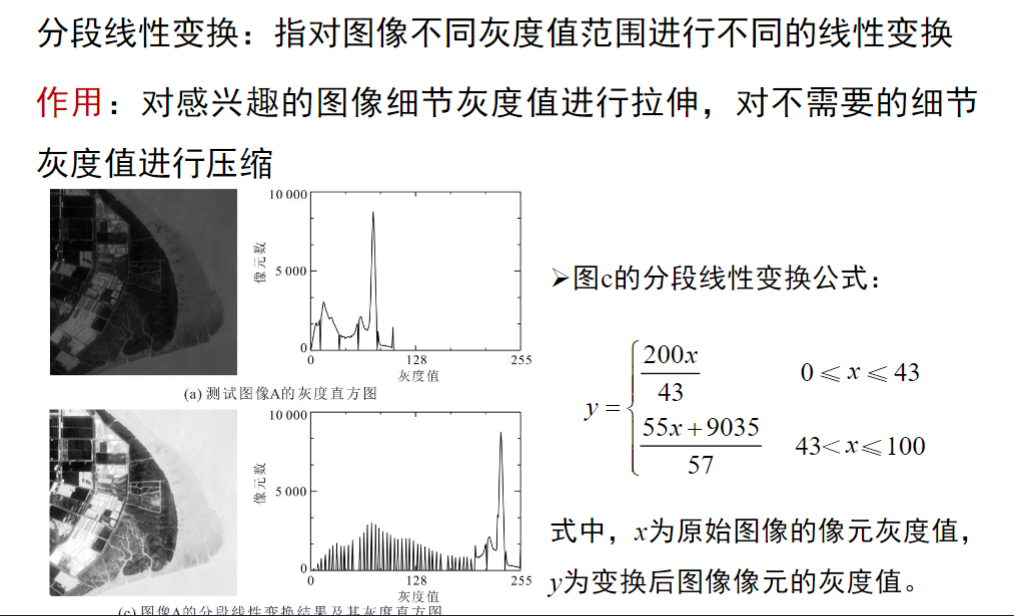
分段线性点运算的应用:
突出感兴趣进行拉伸灰度值范围,抑制不感兴趣的灰度区域,进行压缩灰度值范围。
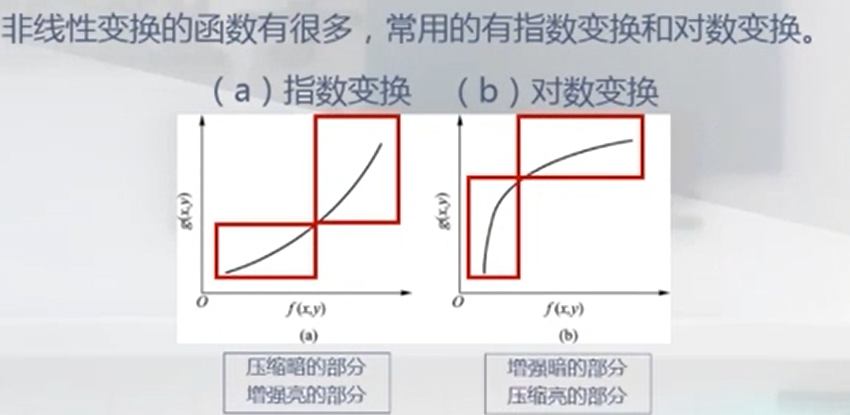
非线性点运算
指数变换:输入比较窄(压缩比较暗的部分)、输出宽的(增强亮的部分)
应用:高斯拉伸、平方根拉伸
3.2.2单波段领域运算
领域窗口:
奇数窗口(比如3x3),有有一个中心像元。
滑动、跳跃窗口领域运算:
把中心像元赋给它
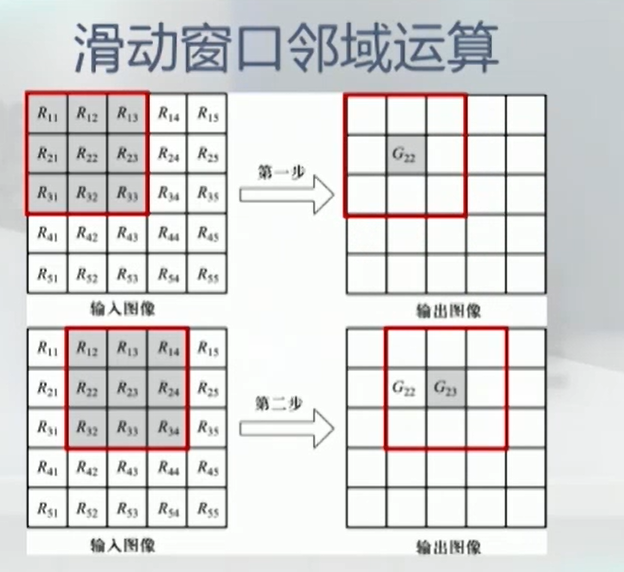
跳跃窗口,步长就是窗口的大小,不重叠,不用中心像元赋值,而是窗口中所有值都统一赋值。
卷积运算
对应相乘相加赋值中心。
应用:图像滤波(图像去噪声、图像增强)
领域统计(池化)
3.2.3 多波段运算
代数运算
eg:NDVI的计算
涉及到加法、减法、比值运算
剖面运算
提取剖面-得到单波段图像–开展单波段运算
3.3 集合运算
3.3.1空间操作
- 图像裁剪:注意边界,不然数据会缺失
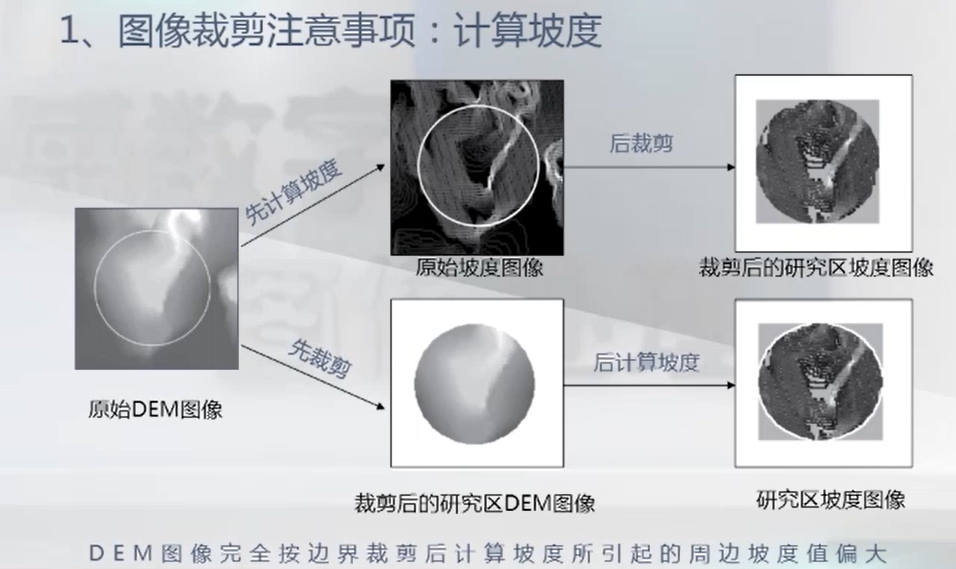
DEM:数字高程模型数据,每个像元代表的是一个地表的高度、高程
坡度的计算:用两个像元的高度差除以分辨率(即两点中心的距离)
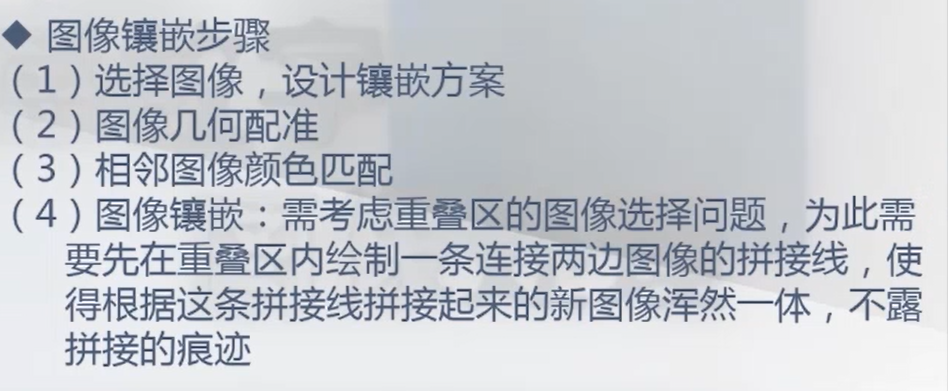
图像镶嵌 :和衣服坏了打补丁一样。
3.3.2波段操作
波段提取、波段叠加(同一地理范围)
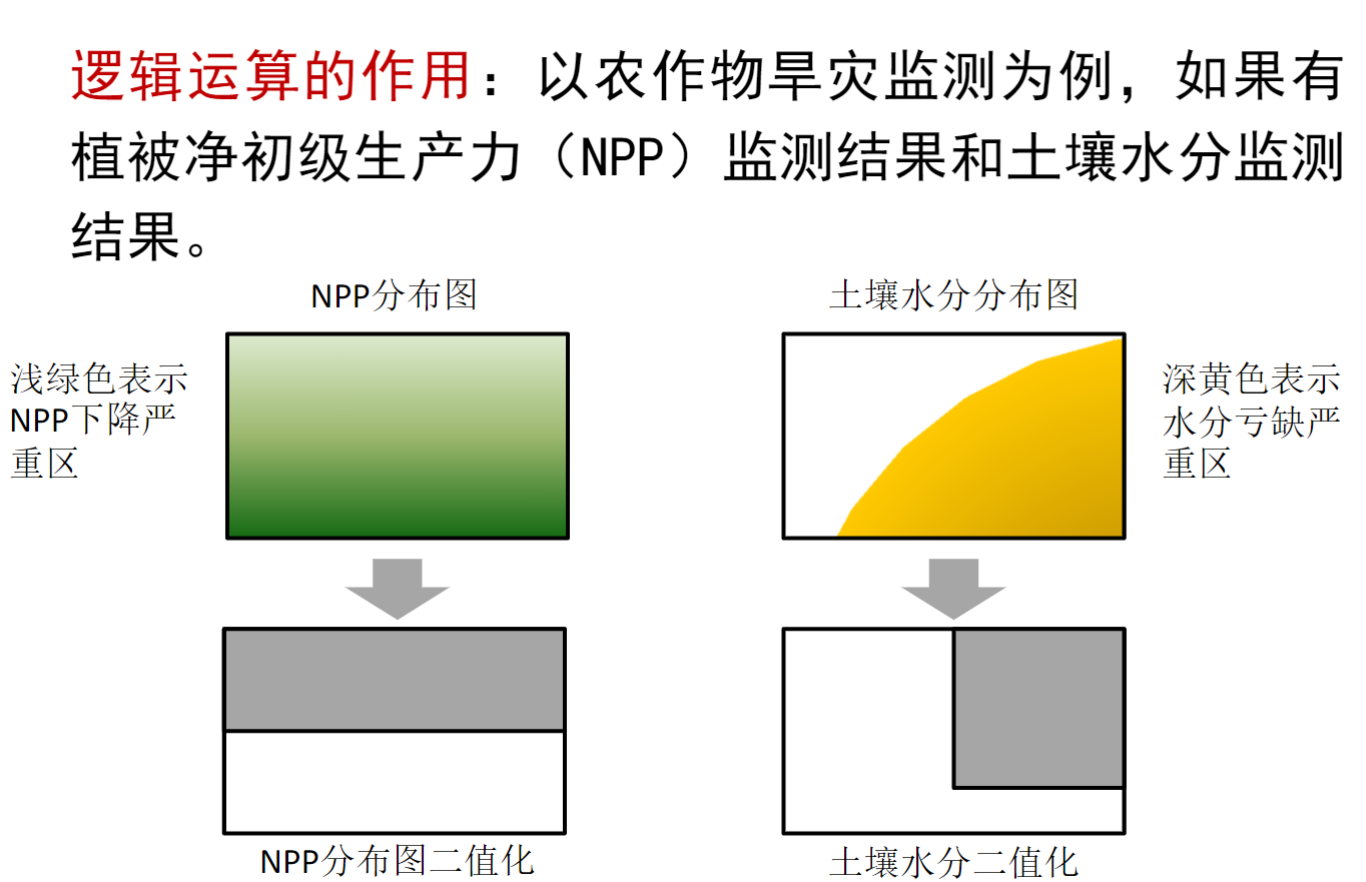
3.4 逻辑运算
求反运算
与运算
或运算
异或运算(相同为0,不同为1)
逻辑运算综合应用
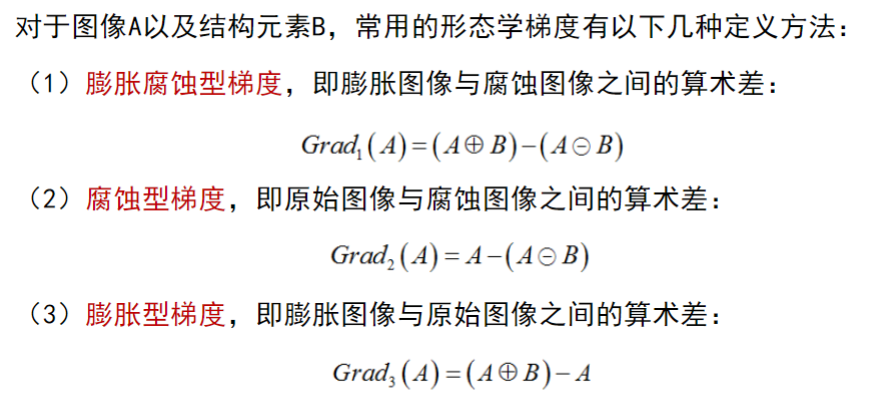
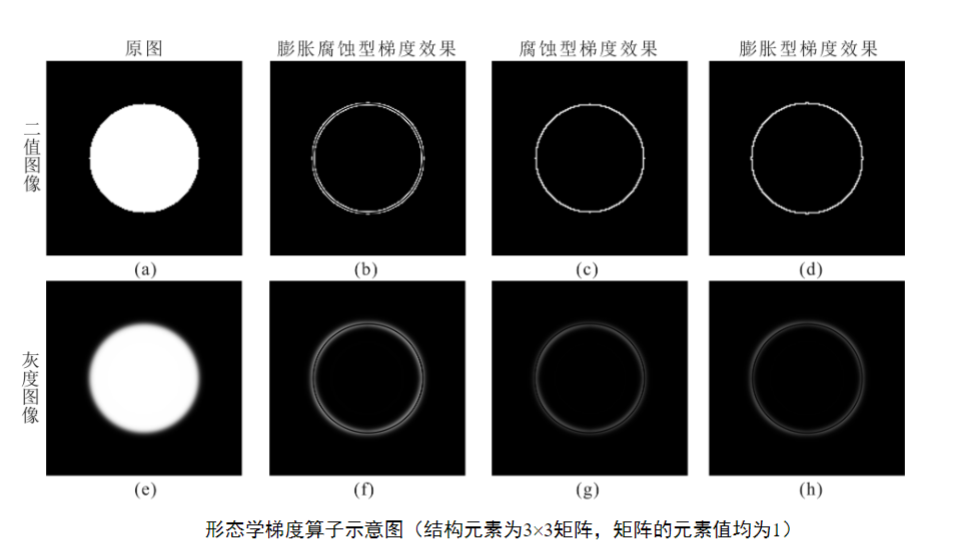
3.5 数学形态学运算
3.5.1 腐蚀
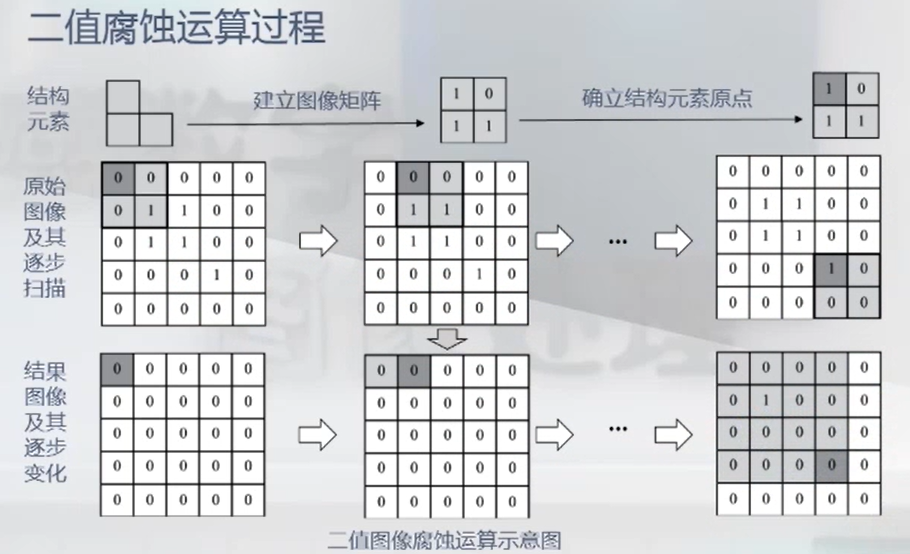
依次遍历,有与结构元素相同的就赋值为1,不相同赋值为0
操作示例:
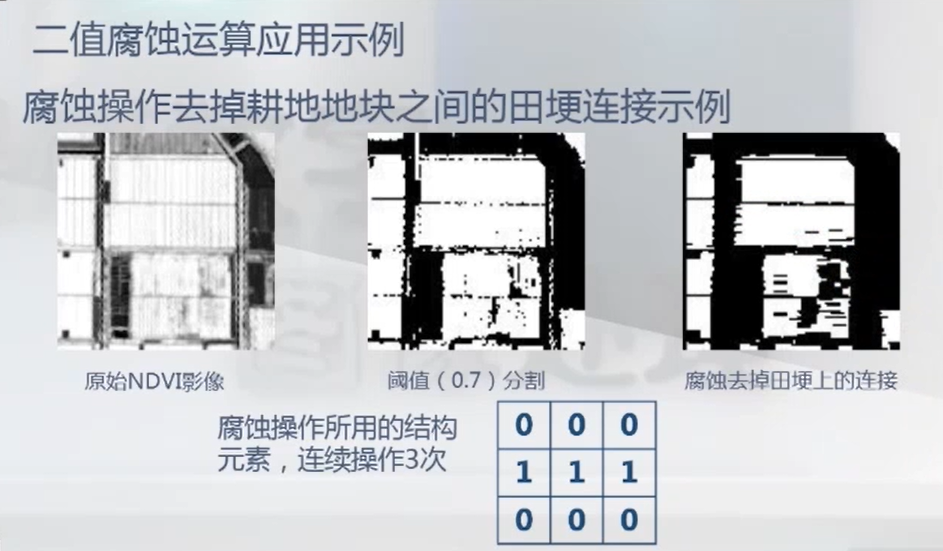
原始的NDVI图像中间是有细小的田埂的,将其值进行二值运算,大于0.7的赋值为1,小于0.7的赋值为0,就得到了中间的那张图。采用结构元素(中间一行为1)进行腐蚀运算,这样田埂就可以消除。
3.5.2 膨胀
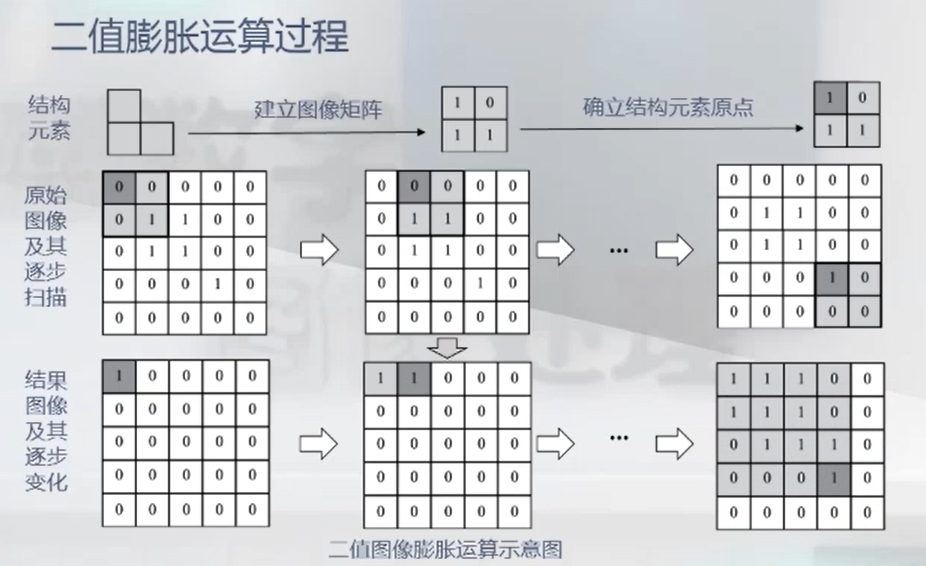
依次遍历一遍,有交集就赋值为1。
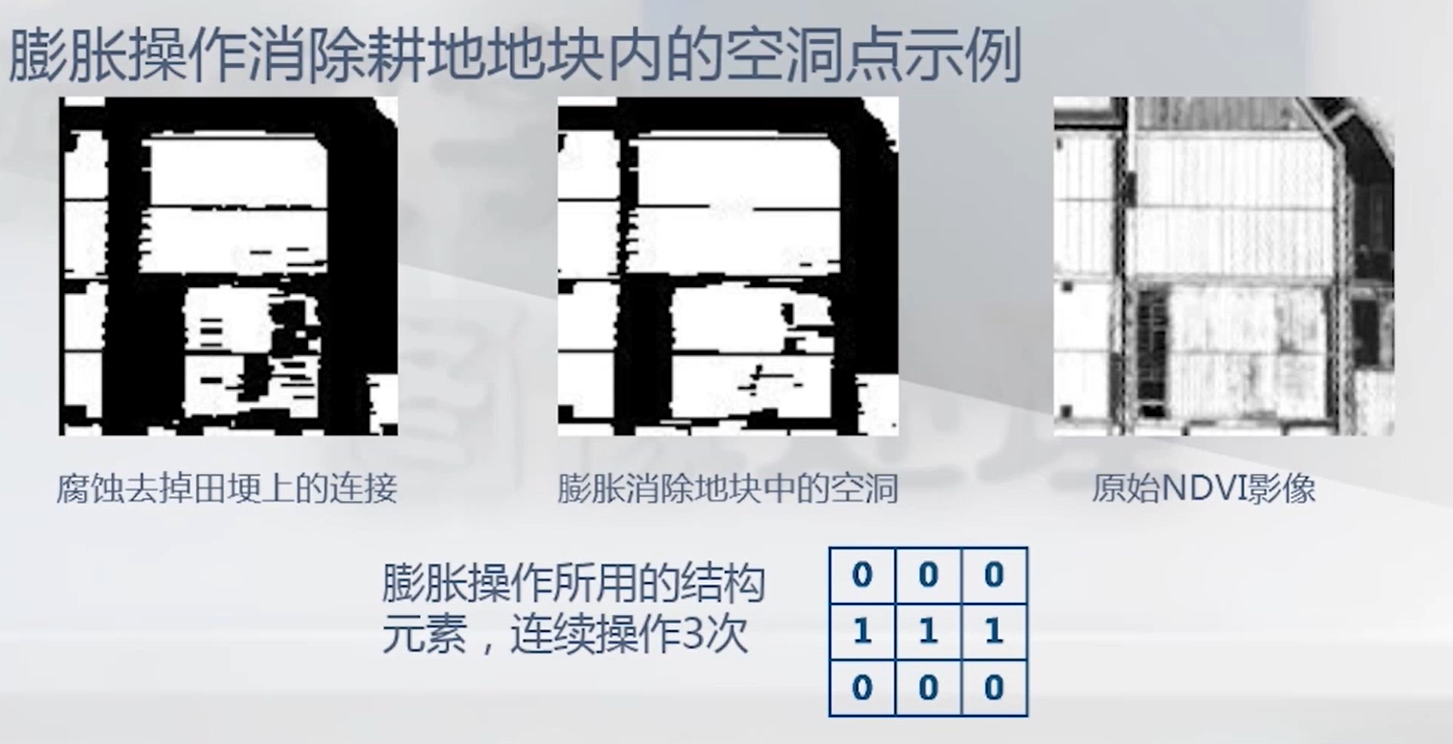
消除空洞点
3.5.3二值形态学
开运算
先腐蚀后膨胀运算

闭运算
先膨胀后腐蚀

3.5.4 灰度形态学腐蚀膨胀
腐蚀:
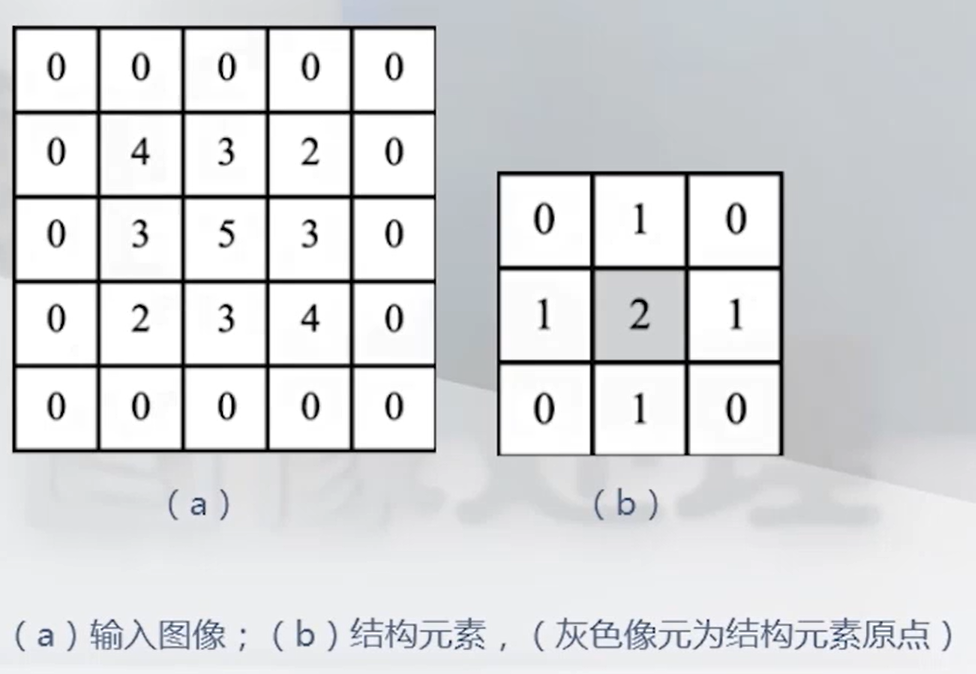
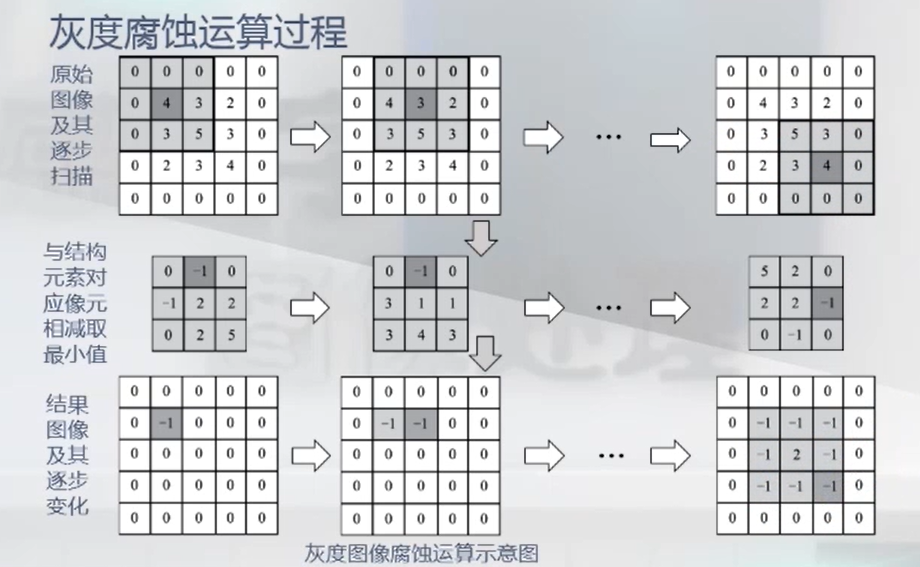
相减取最小值
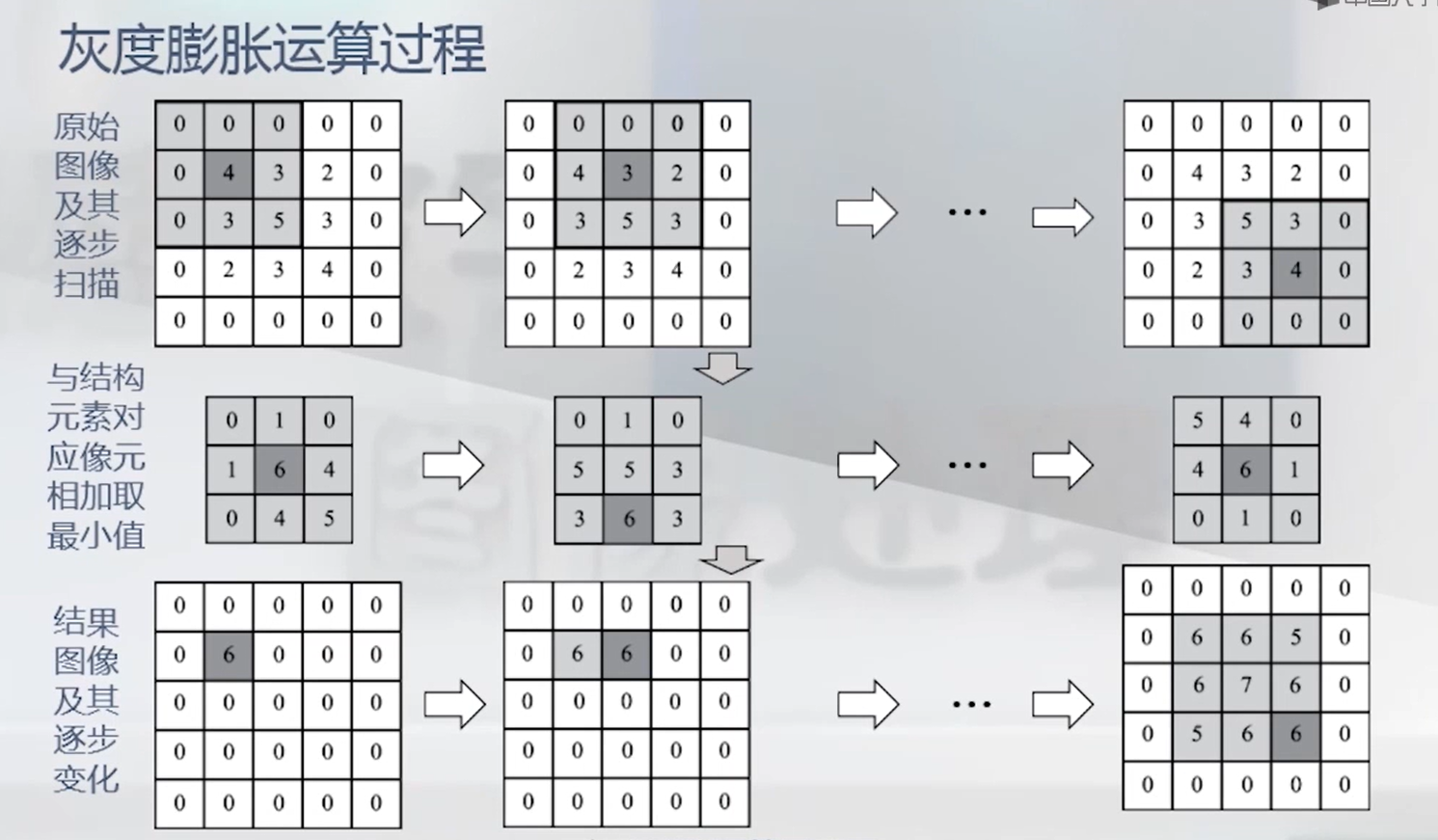
相加取最大值
开运算
先腐蚀、后膨胀
闭运算
先膨胀后腐蚀
灰度形态学运算:去椒盐噪声(胡椒和白盐,胡椒是灰色的点,白盐是白色的点撒在这上面)
实验
图像裁剪和拼接
四、变换域处理方法
不要纠结数学公式
4.2主成分变换
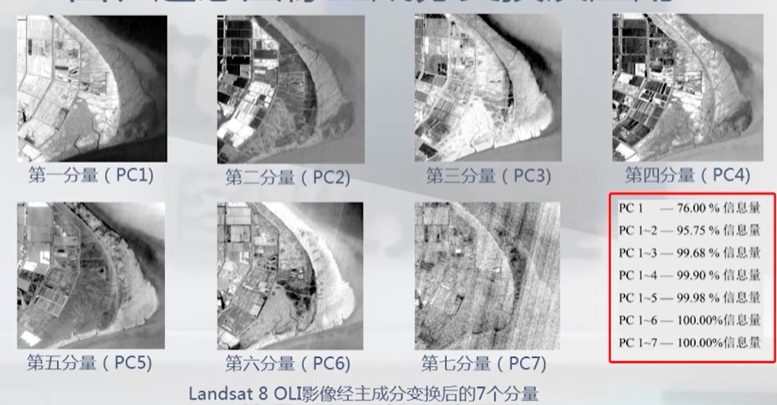
最后那个主成分(pc7)看起来有噪声,可以把它去掉,或者甚至把后面几个主成分都去掉,把前面三个主成分(已占信息量99%)进行反变换,就可以实现信息压缩,去噪声
去相关、信息压缩、特征提取(最大的用处)
4.3最小噪声分离变换
估计噪声,进行主成分变换,调整后再进行主成分变换。
4.4缨帽变换
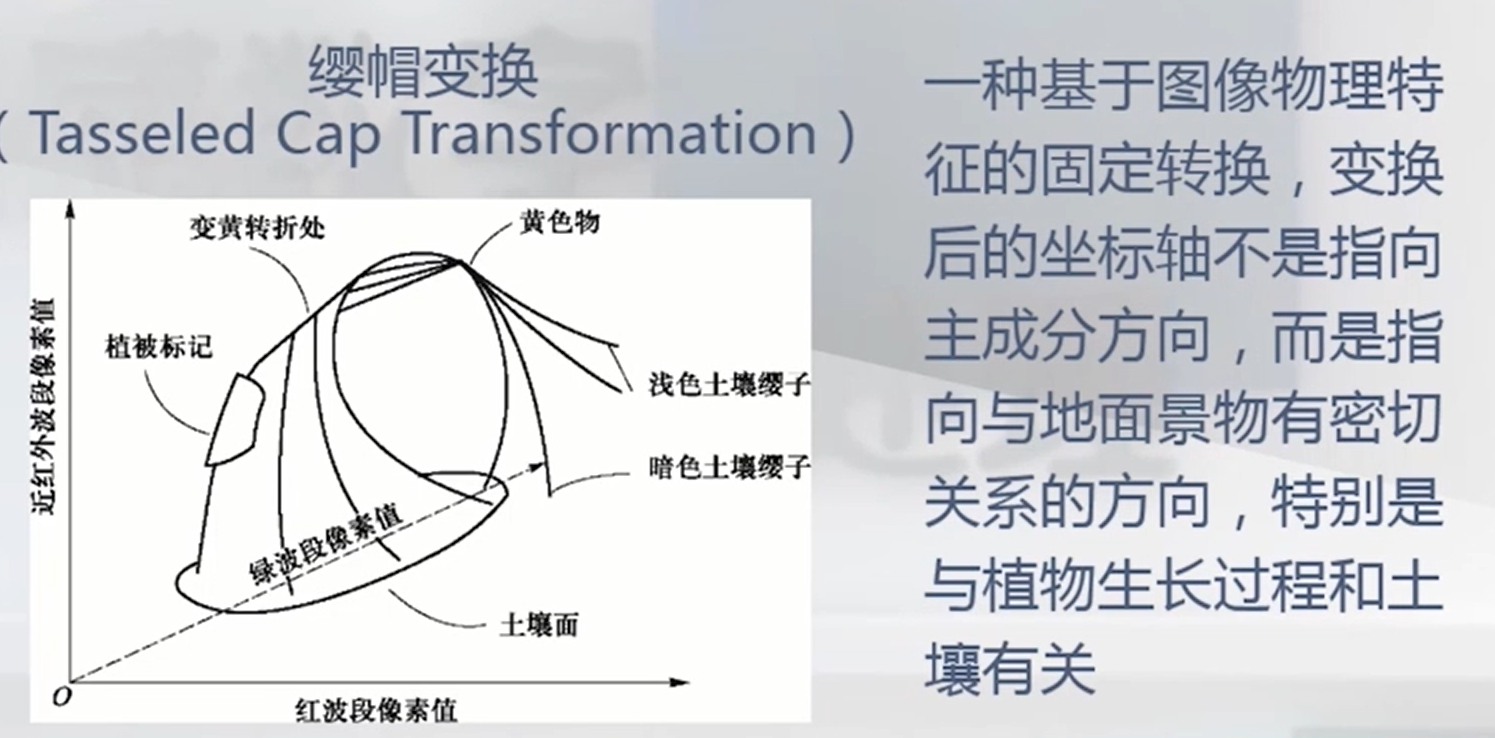
植物、土壤
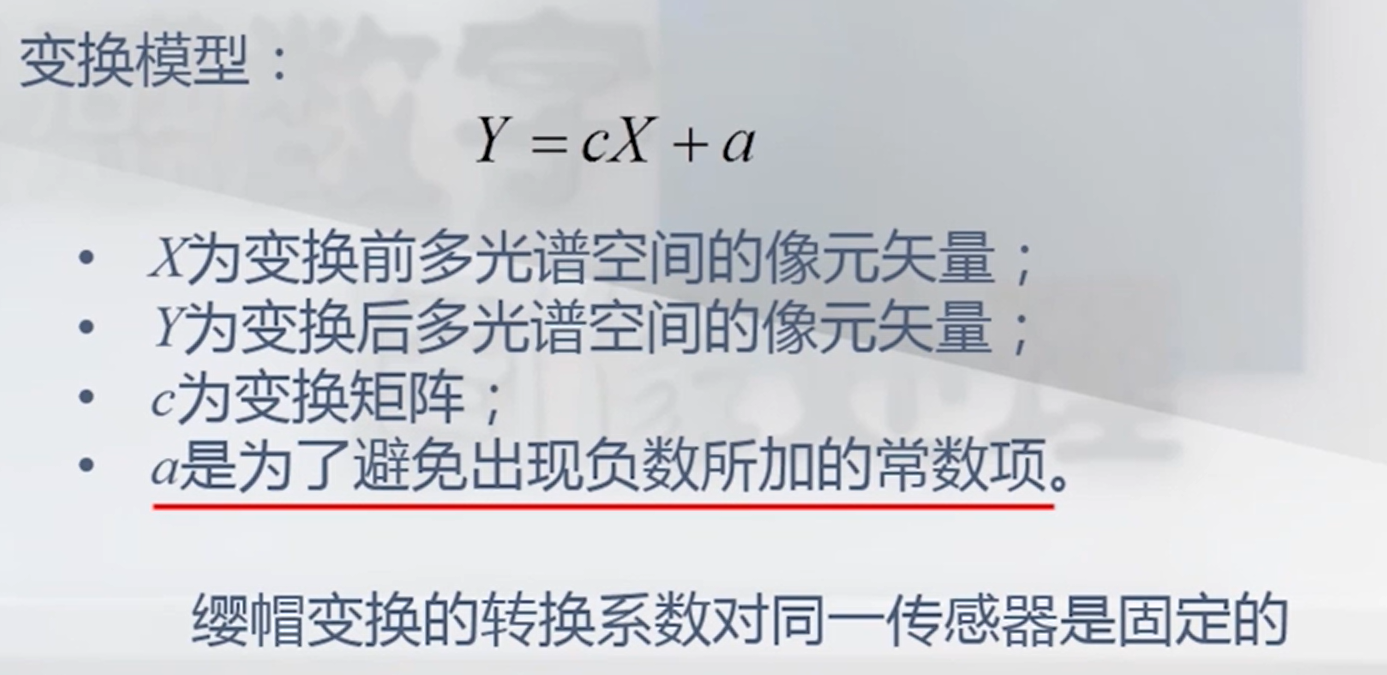
Y = cX+a
应用也是那几个方向,特征提取(最关键)
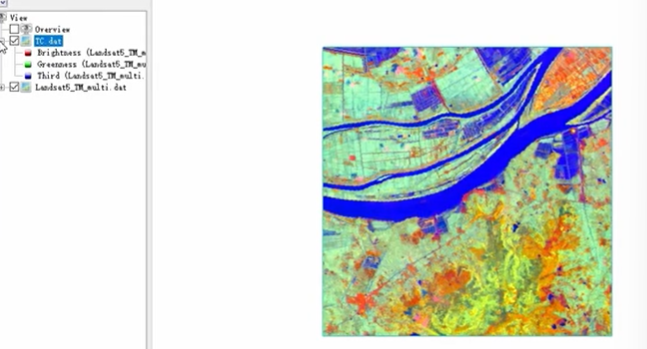
缨帽变换后的图像分别对应亮度、绿度、湿度分量
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-oXroXmoY-1676622345583)(null)]
缨帽变换后可以得到三个分量,可以突出显示水体、植被、岩石
4.5 傅里叶变换
通过频率来分离不同信号的方法! 变换后噪声通常在高频部分
变换后噪声通常在高频部分 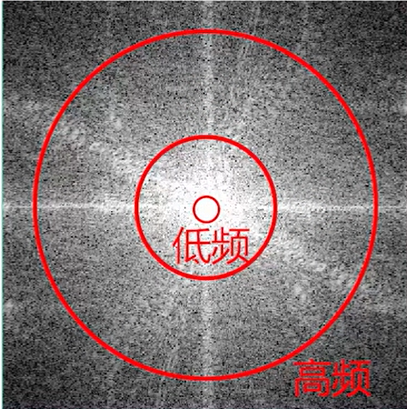
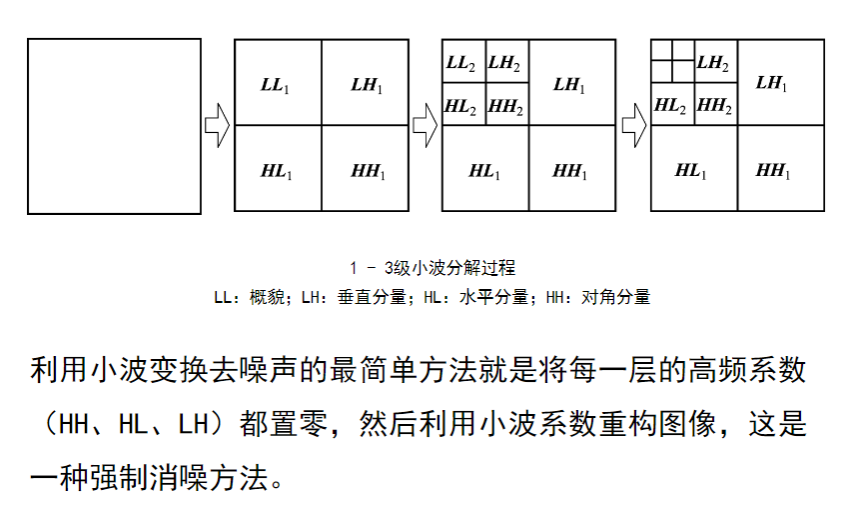
4.6 小波变换
小波:由零开始由零结束,中间为一段震荡的波
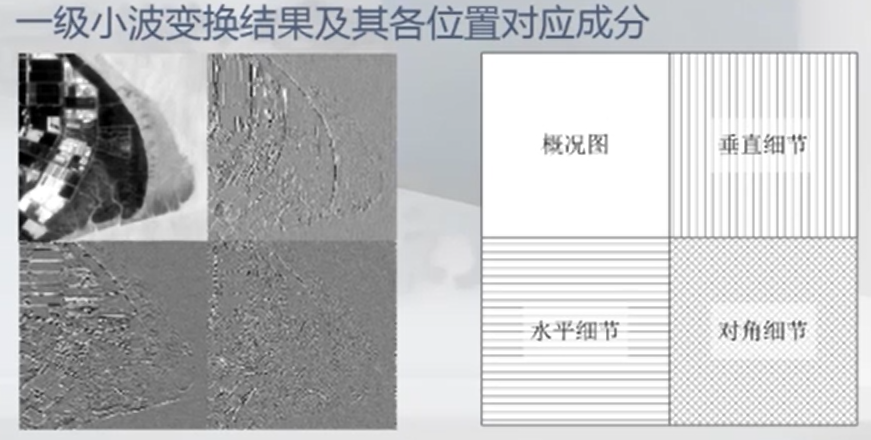
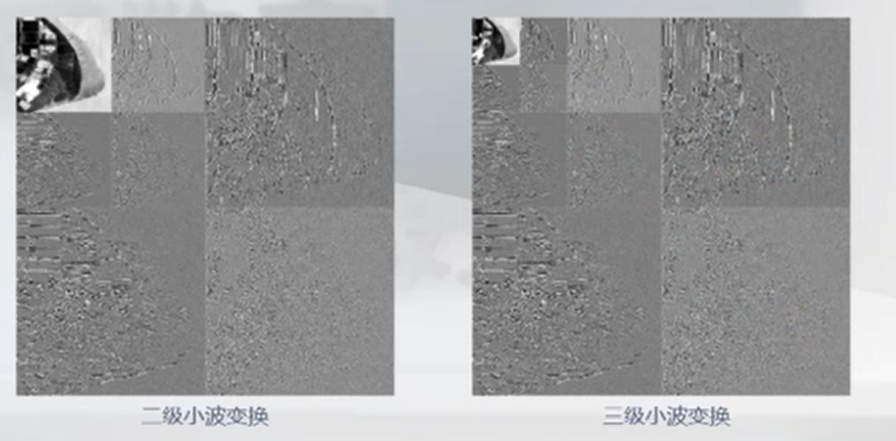
应用:图像压缩、图像去噪、图像增强、边缘检测、图像分割
4.7 颜色空间变换
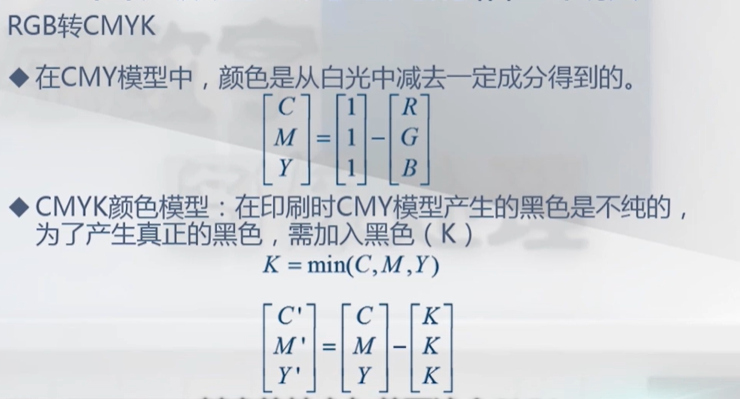
4.7.1CMYK颜色空间
打印的时候一般用CMYK颜色空间
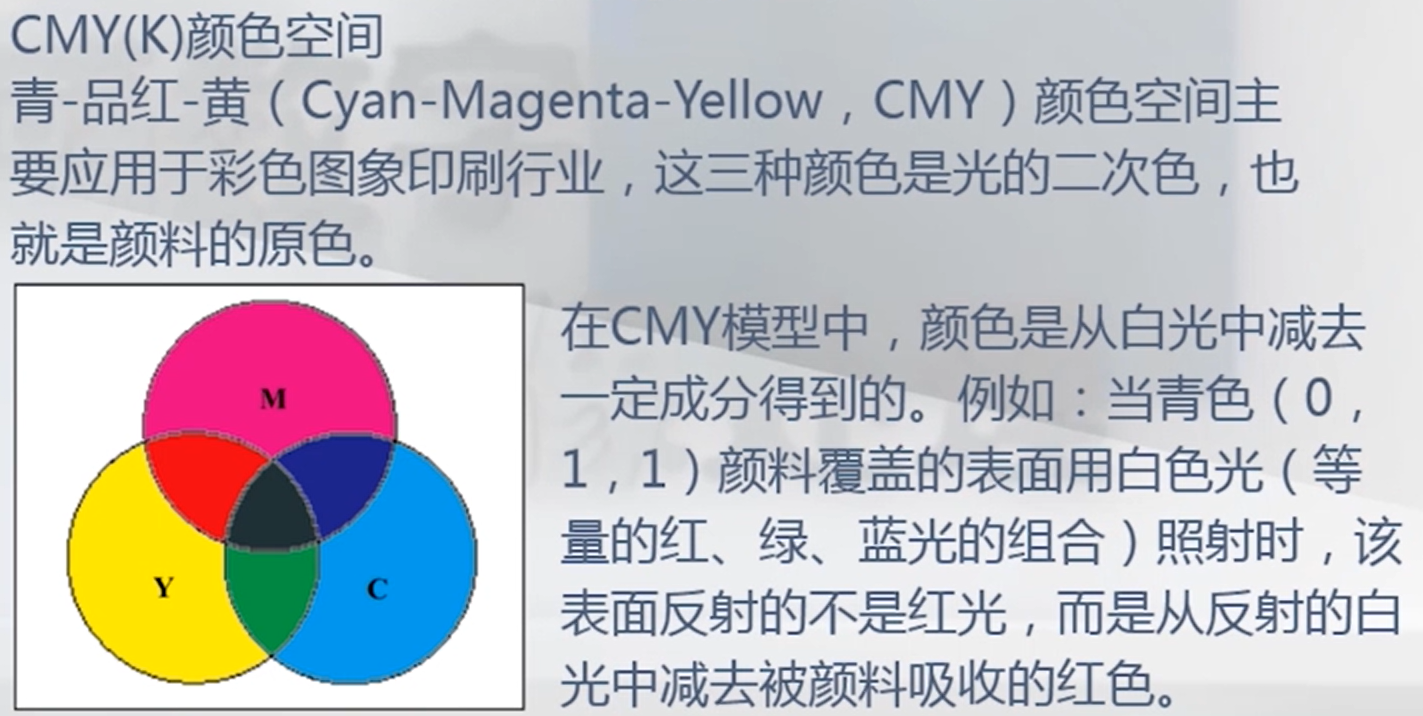
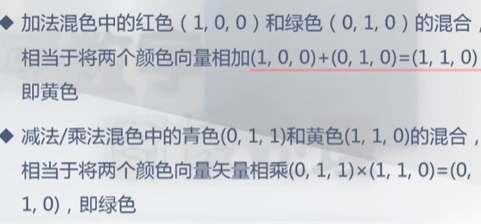
RGB颜色空间是加法混色
CMY颜色空间是减法混色
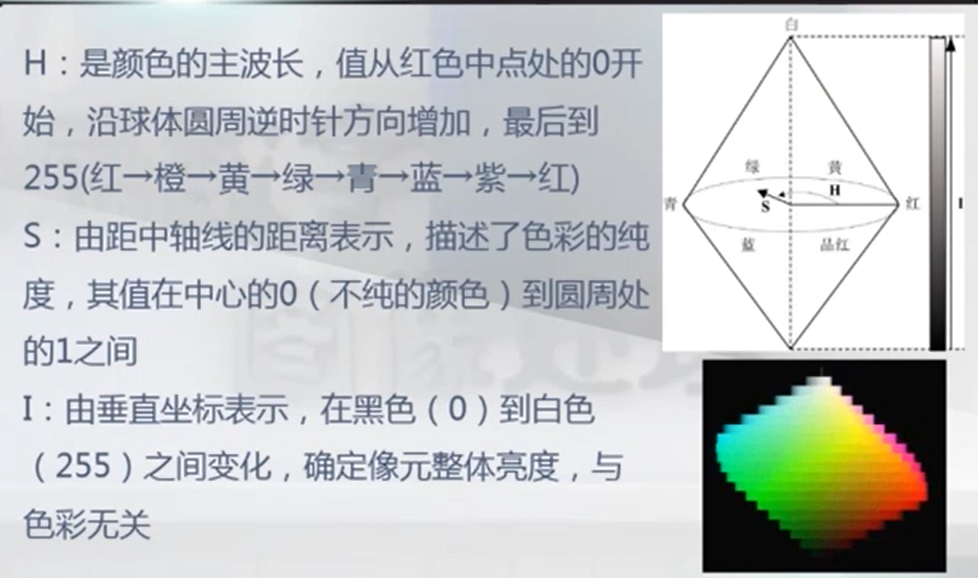
4.7.2 HSI颜色空间
色调H、色饱和度S、亮度I
4.7.3 颜色空间的相互转换

第五章 辐射校正
5.1辐射校正概述
辐射校正:消除或修正因辐射误差而引起的图像畸变这一过程
为了获取地表实际反射的太阳辐射亮度值或反射率,辐射校正通常包含以下三方面的处理:
传感器校正,即辐射定标
大气校正
地形及太阳高度角校正
5.2 传感器校正
消除传感器本身的误差
把DN值转化为辐射亮度或反射率
5.3 大气校正
为什么全色波段不做大气校正?大气校正是为了消除大气吸收散射的影响
首先从遥感的原理可以知道波长越短穿透能力越弱,所以蓝光波段最容易收到水汽影响(散射、反射等等),从蓝光到近红外水汽影响逐渐减弱,所以要对多光谱进行大气校正。而我们常见遥感数据的全色波段是不包含蓝光范围的,所以不再需要进行大气校正。
5.3.1大气校正统计模型
-
内部平均相对反射率法
假定图像内部地物充分混杂,将整幅图像的平均辐射光谱值作为参考光谱。计算像元光谱曲线与参考光谱曲线的比值,作为反射率。
计算方法:某波段像元灰度值/该波段所有像元灰度平均值
不足:当图像中出现强吸收的区域,平均值会变低。对于高反射率区域反射率会大于1,出现假的反射峰
-
平场域法
选择一块面积大且亮度高而光谱响应曲线变化平缓期的区域,如沙漠、水泥地建立平场域。
用灰度值除以平场域的灰度值
-
对数残差法
通过比值运算,把地形和光照因子给消掉
-
经验线性法
R = k ∗ D N + b R=k*DN+b R=k∗DN+b
就是反射率R作为纵坐标,DN值作为横坐标,线性回归拟合出一条直线。
样本点各向同性,光谱跨度要大,样本种类多,保持统一海拔。
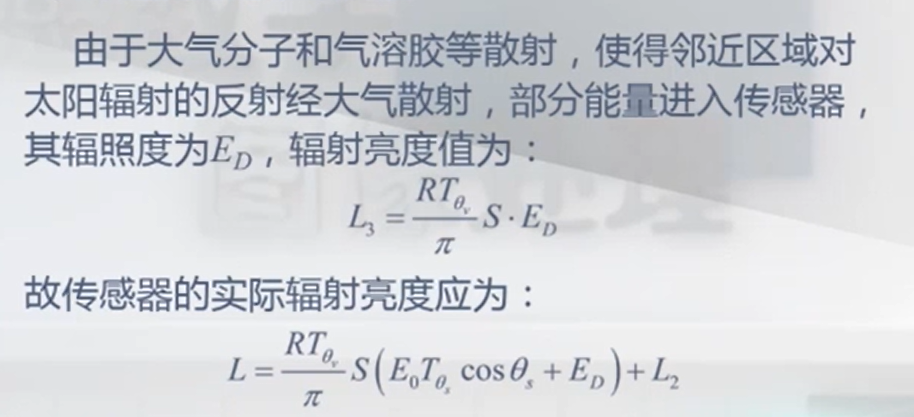
5.3.2 大气校正物理模型
大气校正物理模型基础
6S模型

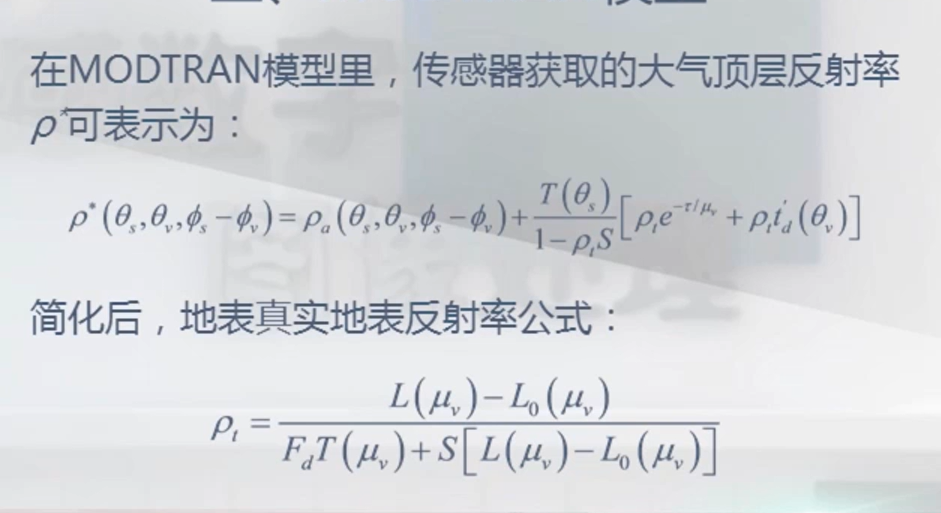
MODTRAN模型
ENVI处理时:
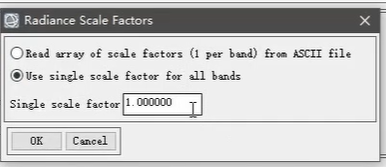
在输入辐射定标后的图像后,弹出辐射亮度单位转换设置窗口,选择单一转换因子,关于单一转换因子的设定single scale factor这里,若在辐射定标的输出比例因子的设置时,使用的默认参数1,这里设置为10,如果使用的FLAASH默认参数,这里设置为1
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-wpqkGix3-1676622344074)(https://gitee.com/meiruni/image/raw/master/img/%E5%A4%A7%E6%B0%94%E6%A0%A1%E6%AD%A3%E5%8F%82%E6%95%B0.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-8jkA1ojH-1676622344075)(https://gitee.com/meiruni/image/raw/master/img/%E5%A4%9A%E5%85%89%E8%B0%B1%E8%AE%BE%E7%BD%AE.png)]
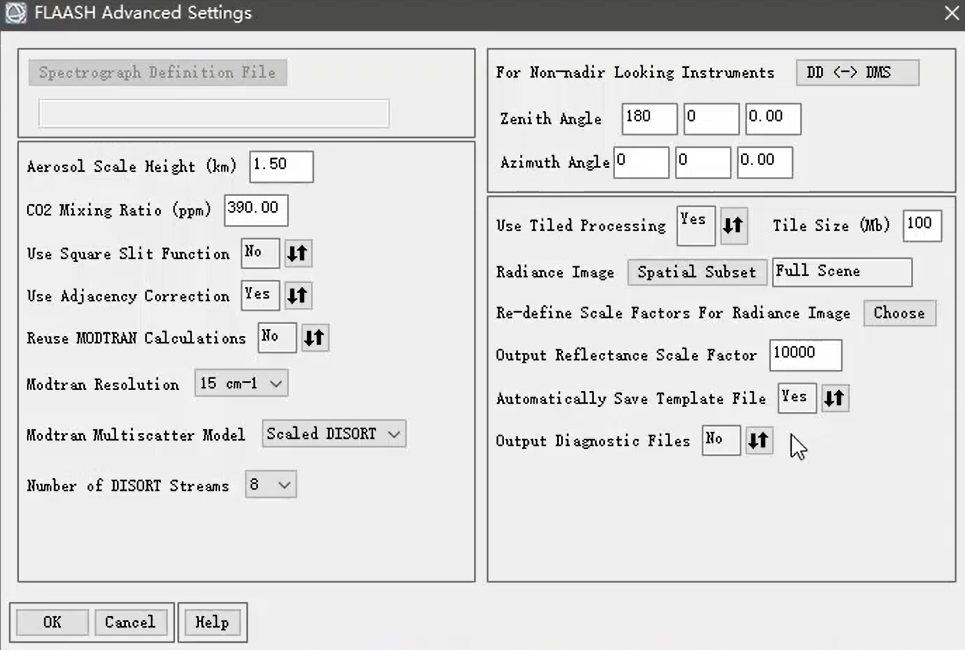
这些公式不用记忆,都是根据前面讲的大气校正物理模型来构建的,只是对有些假设条件,比如大气模式、气溶胶模式不一样
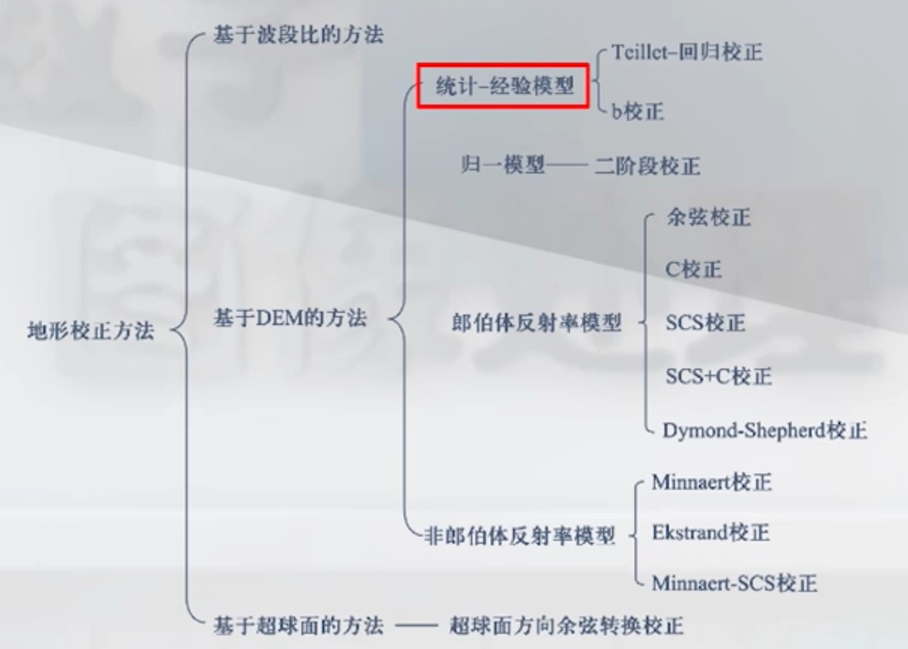
5.4 地形及太阳高度角校正
消除由地形引起的辐射亮度误差,使坡度不同但反射性质相同的地物在图像中具有相同的亮度值
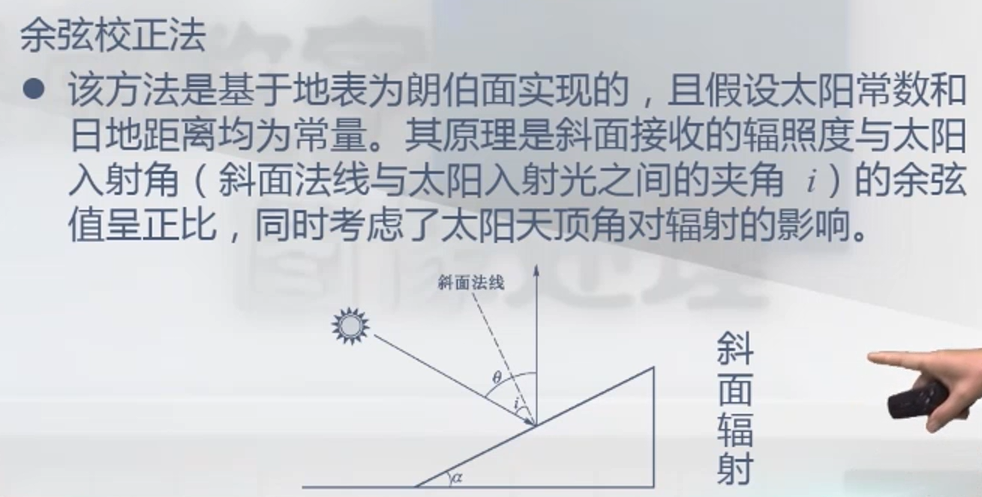
5.4.1 余弦校正(地形)
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-TNX1ocs3-1676622344078)(https://gitee.com/meiruni/image/raw/master/img/image-20220921154120734.png)]
主要是用了入射角和天顶角这样一个校正
如果i比较大,趋向于90°的话,cosi就趋向于0了,那么结果会很大。所以会出现过度校正的情况(校正的值远远高于实际的值)
5.4.2 半经验校正(地形)
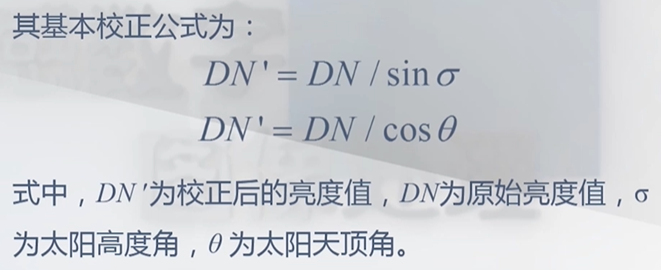
5.4.3 太阳高度角校正(太阳)
通过将太阳高度光由倾斜照射变为垂直照射
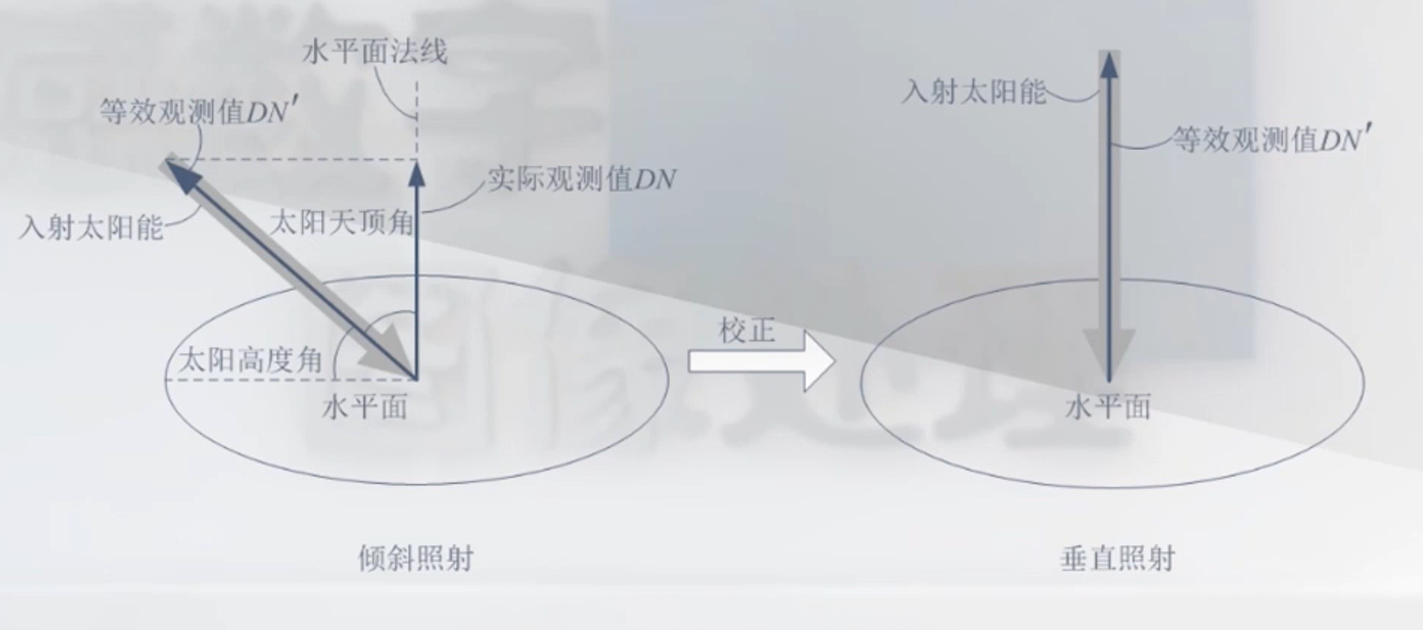
太阳高度角校正就是用来除以sin或者cos就好。
第六章 几何校正
6.1 遥感图像的几何变形
遥感图像上各种地物的位置、形态、尺寸、方位等特征与其在某个图像投影的参照系统中表达要求不一致。

静态误差:传感器相对地面静止
动态误差:地球旋转
内部误差:传感器自身原因
外部误差:传感器正常,由其他各种因素造成的误差
几何变形的影响因素:
-
遥感平台位置和运动状态变化
-
地形起伏(像点位移)见4.2节
- 高(低)点在图像上的像点相对于平面点向远离(靠近)图像中心方向移动
-
地球表面曲率
地球表面是弧形的,不是直的,向图像中心移动
-
大气折射
-
地球自转
对于扫描类的传感器,地球自转会让影像偏离(错位)
6.2 遥感图像的几何校正
将多种因素引起的变形纠正过来
几何粗纠正(一般下载下来的图像都已经系统误差校正过)
几何精校正:利用GCP地面控制点进行
6.2.1几何精校正的过程与方法:
-
地面控制点选取
尽量选择图像上有明显、清晰的定位识别标志,如道路交叉点。
-
多项式校正模型
待校正的图像上的图像坐标(x,y)与真实地理坐标(X,Y)之间的函数映射关系
x是错误点横坐标,它与正确点(X,Y)存在一种函数关系(也就是通过已知的x,y,可以求出未知的X,Y)如果偏的比较明显,那么这个多项式函数相对就复杂些,即需要求出更多的参数 a i j a_{ij} aij, b i j b_{ij} bij使其满足这个方程。
当N=2时,M最少控制点数为6, M = ( N + 1 ) ∗ ( N + 2 ) 2 M=\frac{(N+1)*(N+2)}{2} M=2(N+1)∗(N+2)也就是最少需要在待校正的图像上找6个点,当然找的越多校正效果越好
-
坐标变换
直接校正法(从待校正图像出发)
利用步骤2求得的方程,可以根据(x,y)求出(X,Y),可以重新定位,然后把对应的像元值也赋予过来。但是原始图像存在几何变形,所以有些可能重复,难得到均匀排列的像元值。
间接校正法
从空白的校正后的图像出发,将(X,Y)定位,然后赋予对应像元值。
-
灰度重采样
运用步骤2函数后算出的(X,Y)坐标有些会出现小数点,这时候就得让它重新赋值。方法如下:
-
第一种:最近邻法(离哪个点近值就赋给哪个点)—简单但会造成像元值不连续
-
第二种:双线性内插法
 根据距离赋予权重,加权求和。最常用,解决不连续,但计算增加
根据距离赋予权重,加权求和。最常用,解决不连续,但计算增加 -
第三种:三次卷积内插法
 。虽然边缘有所增强,但计算量太大
。虽然边缘有所增强,但计算量太大
-
-
几何校正类型
-
图像到图像的几何校正
-
图像到地图
告诉经纬度
-
具有已知几何信息的几何校正
先建立一个几何查找表
-
正射校正(加Z轴)
正射校正不仅能够实现常规的几何校正功能,还能通过测量高程点和DEM来消除地形起伏引起的图像几何畸变,提高图像的几何精度。
经纬度更加精确
-
-
图像配准与投影转换
几何校正注重的是数据本身的处理,目的是为了对数据的一种真实性还原。
图像配准注重的是图与图(数据)之间的一种几何关系,其目的是为了和参考数据达成一致,不考虑参考数据坐标是否正确。
第七章 图像去噪声
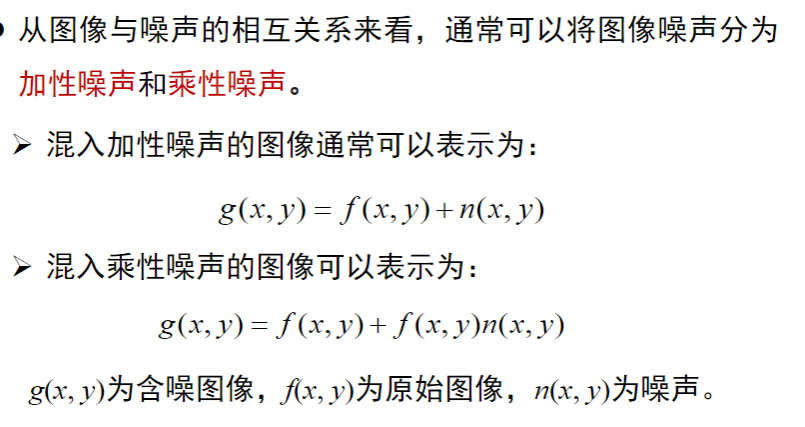
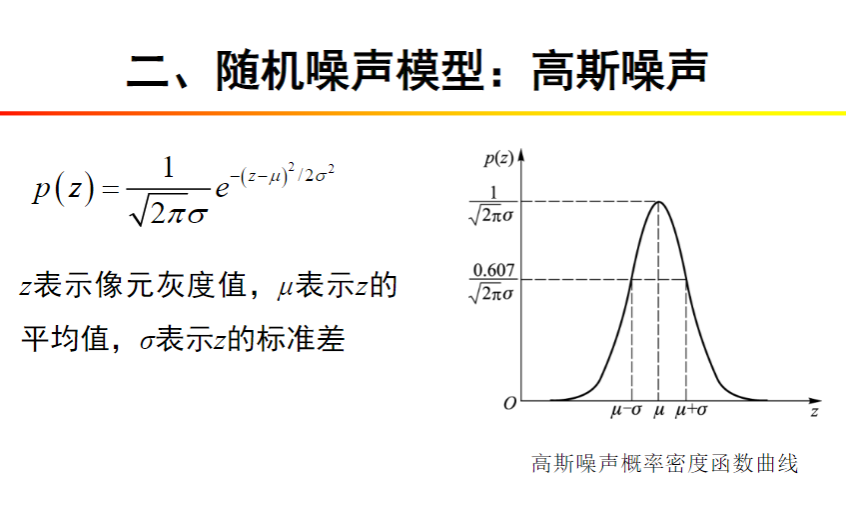
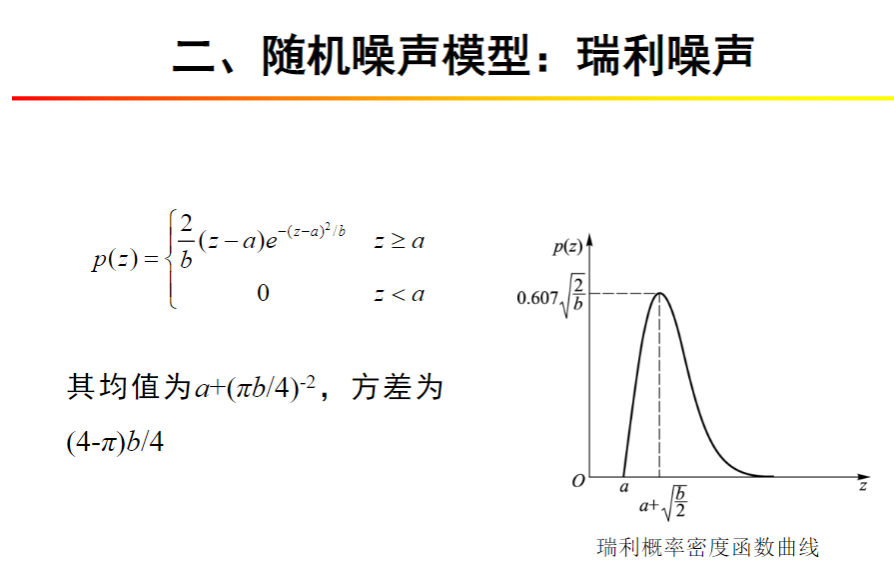
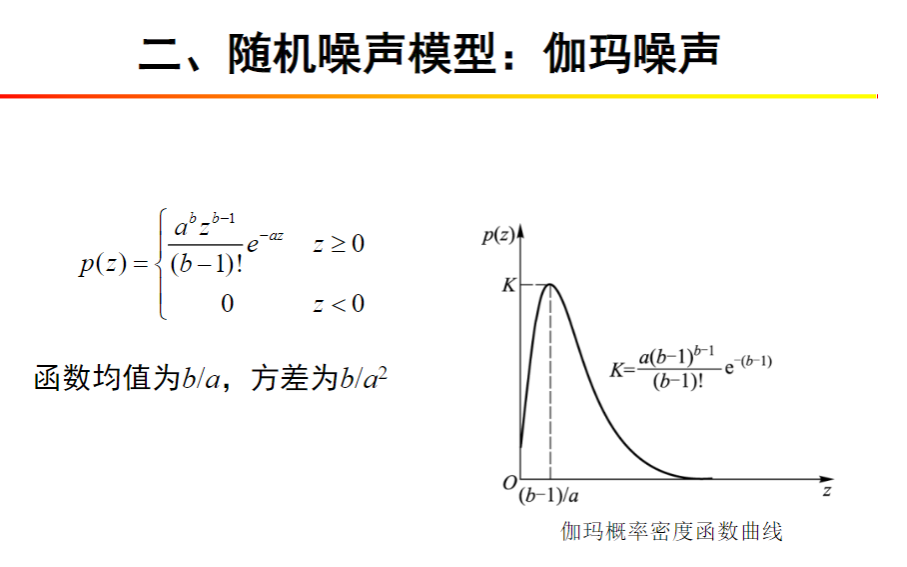
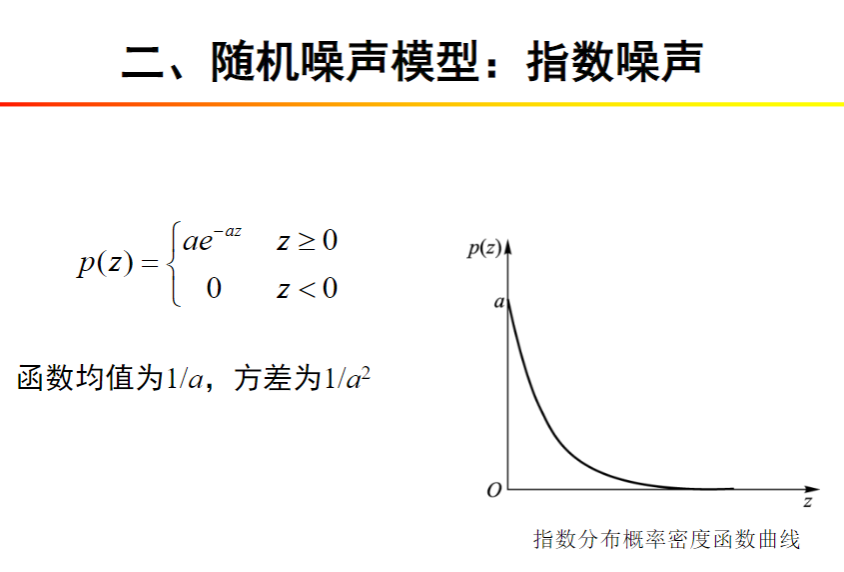
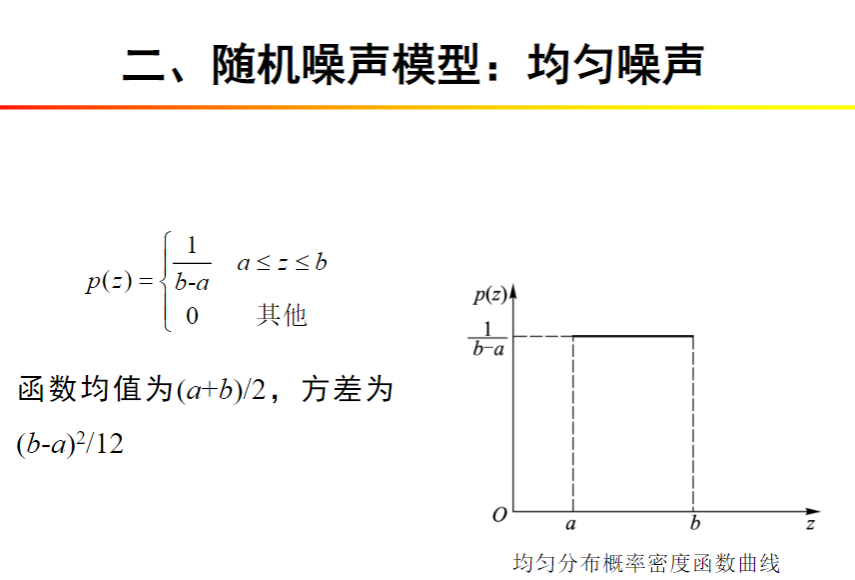
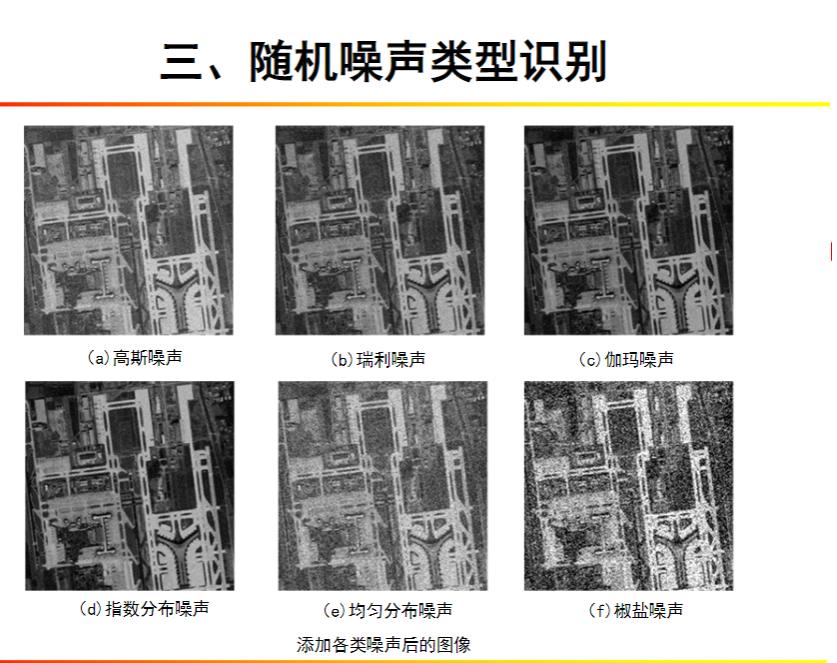
7.1 噪声分类
随机噪声模型
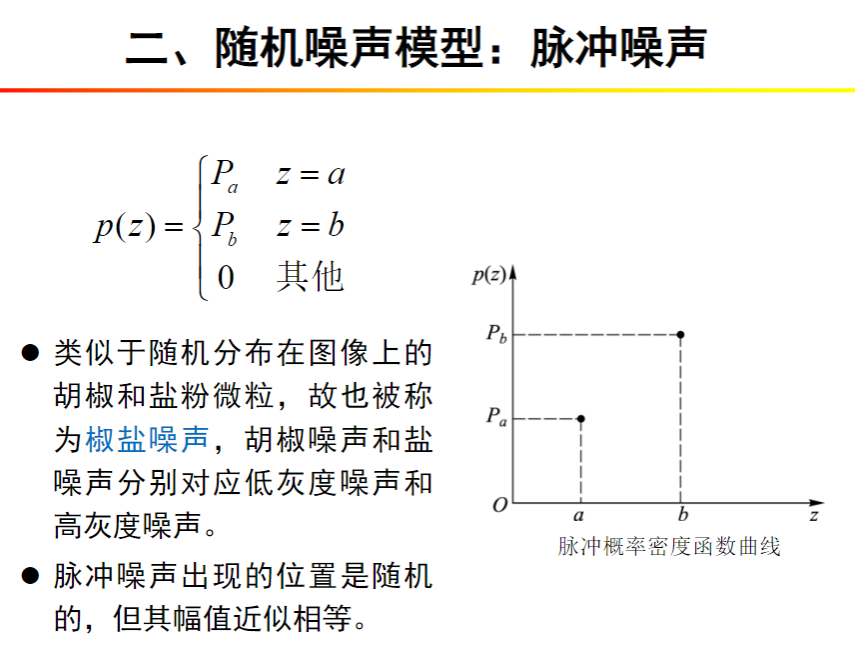
a对应胡椒,b对应盐
噪声类别如何识别?
通常选择图像中白色的墙壁、灰色的地板,查看它的直方图形状来判断其噪声类型。
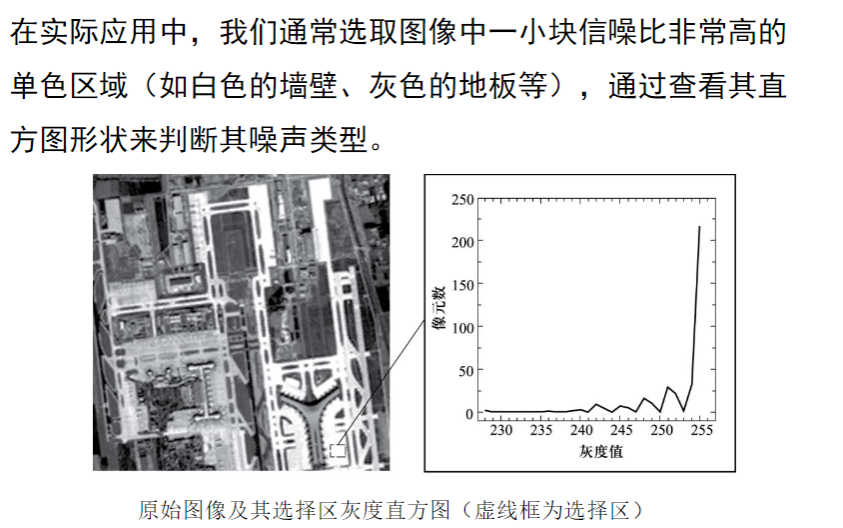
理论上单色的灰度值是一根柱子,比如白色的墙壁,255。如果它变了形状说明就有噪声。快接近255的时候特别高
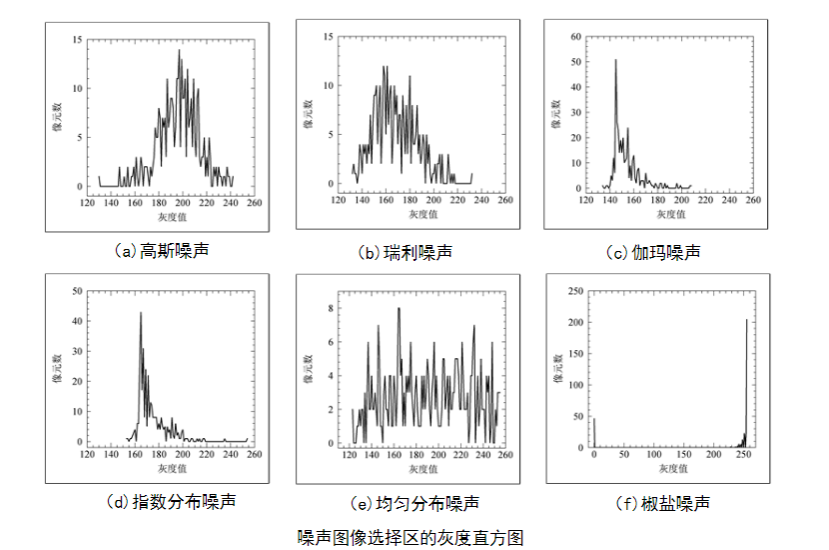
混入噪声后直方图就变成了上面的这个形状
7.3空间域去噪声
空间域去噪声是利用待处理像元领域窗口内的像元进行均值、中值或其他运算得到新的灰度值,并将其赋给待处理像元,
通过对增幅图像进行窗口扫描及运算,达到去除噪声的目的。
空间域去噪方法:
7.3.1均值滤波
遍历+卷积运算,把均值赋给中心像元
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-i1HEBxdx-1676622344097)(https://gitee.com/meiruni/image/raw/master/img/QQ%E6%88%AA%E5%9B%BE20220926154506.png)]
7.3.2 中值滤波
将中间的值赋予给中间像元
7.3.3边缘保持平滑滤波
中值滤波和均值滤波会将图像变得模糊,也就是图像变平滑了,主要是上图像的边缘不突出了。
边缘保持滤波设计思路:判断一下如果是边缘那么不要它滤波,让它去掉。
K邻近均值滤波
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-TsO4cCRh-1676622344098)(https://gitee.com/meiruni/image/raw/master/img/QQ%E6%88%AA%E5%9B%BE20220926155733.png)]
7.3.4数学形态学去噪
开运算:去峰值噪声
闭运算:去低谷噪声
详看3.5节
7.4变换域去噪声
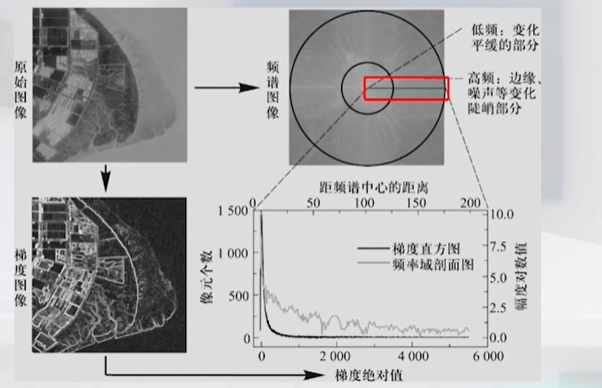
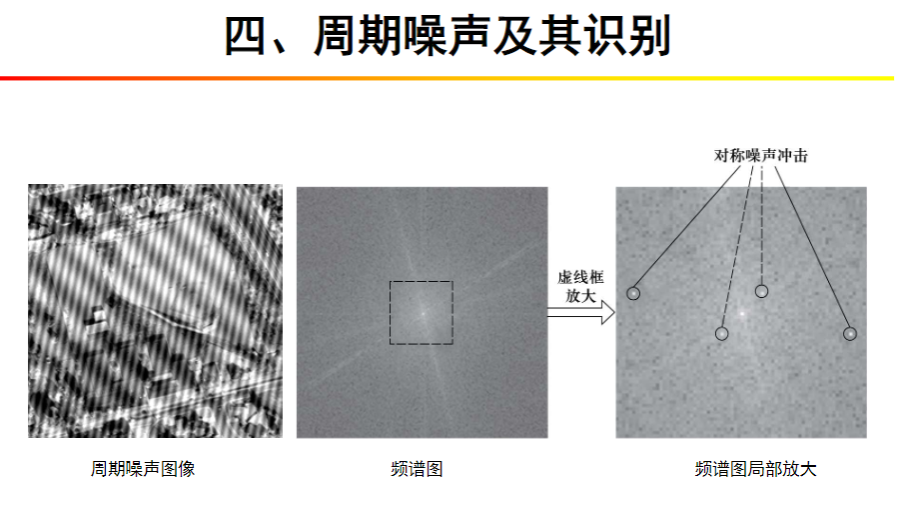
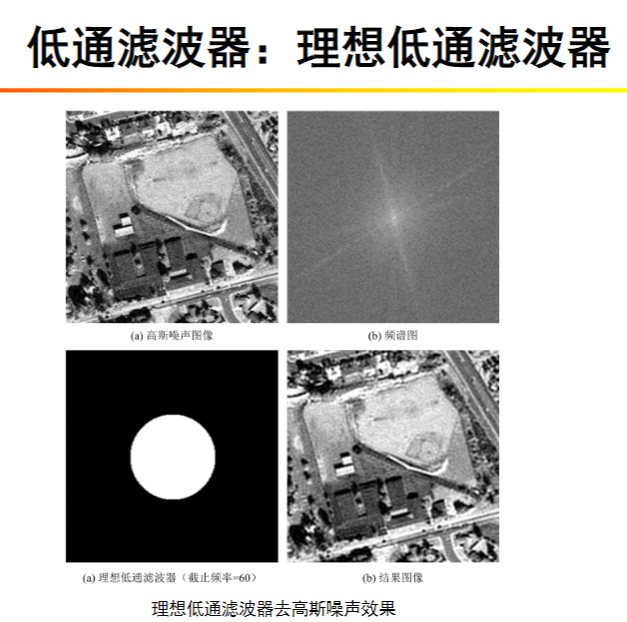
7.4.1 傅里叶变换去噪声
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-fhrMKqao-1676622344098)(https://gitee.com/meiruni/image/raw/master/img/image-20220926161751492.png)]
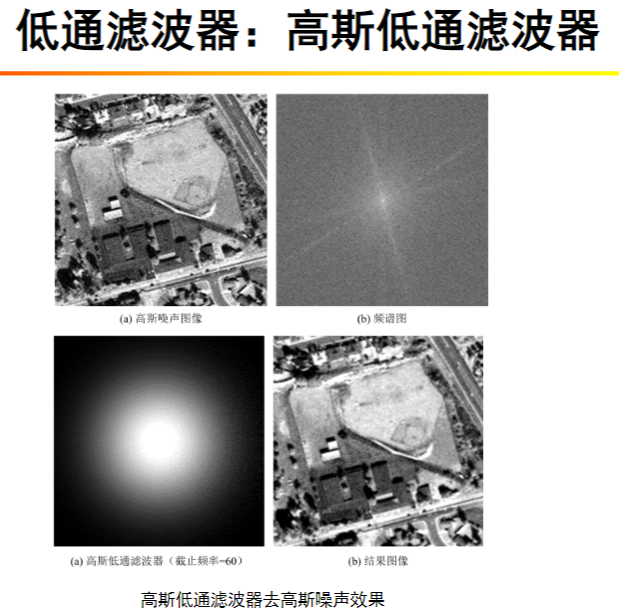
可以看第4.5节,把图像转化成一个频谱图,中间是频率低的部分越往外频率越高。
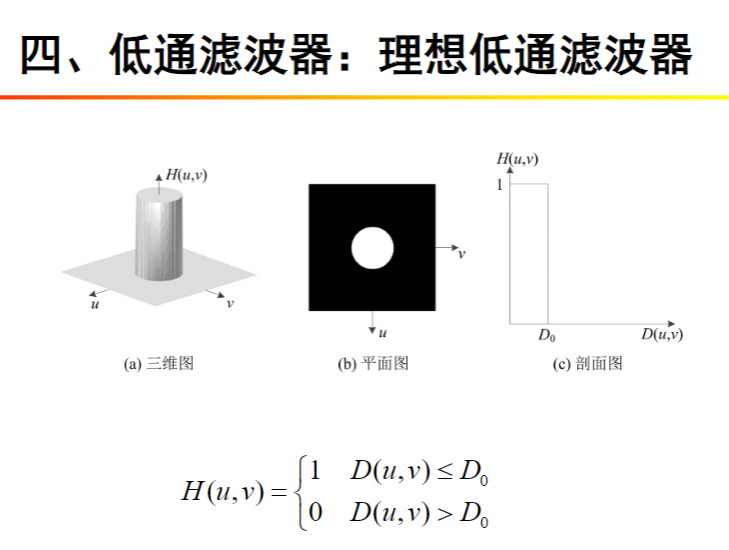
低通滤波器:
就是低频的能通过,高频的被阻止了
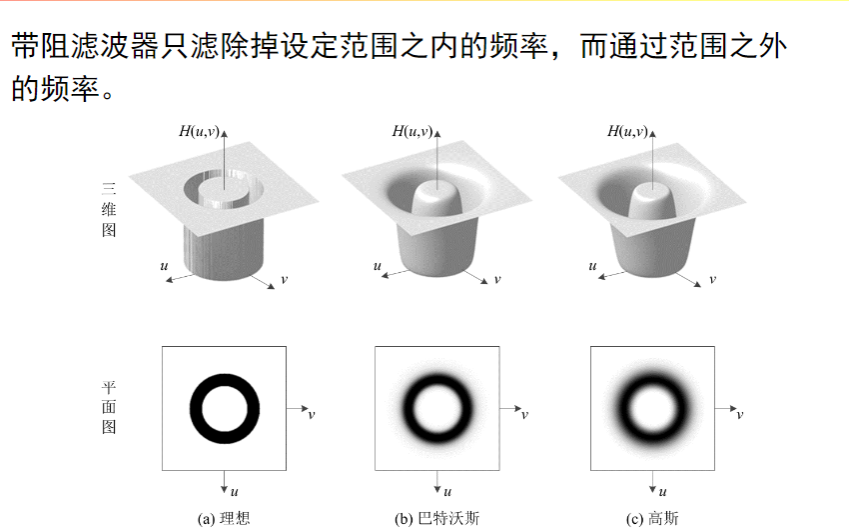
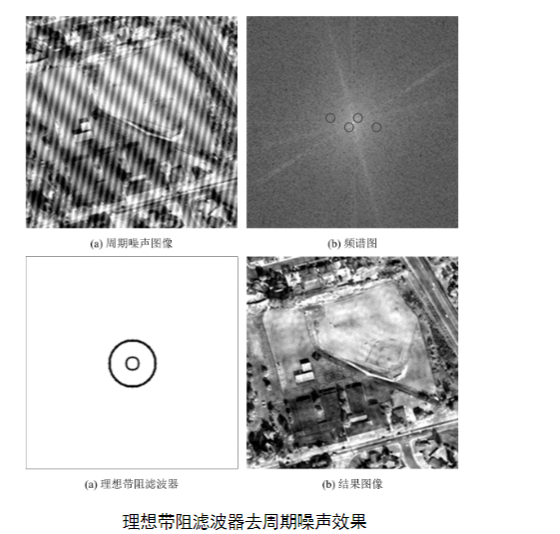
带阻滤波器:
带阻就是将这个条带的频率阻止了
陷波滤波器:
某几个点的频率被阻止了
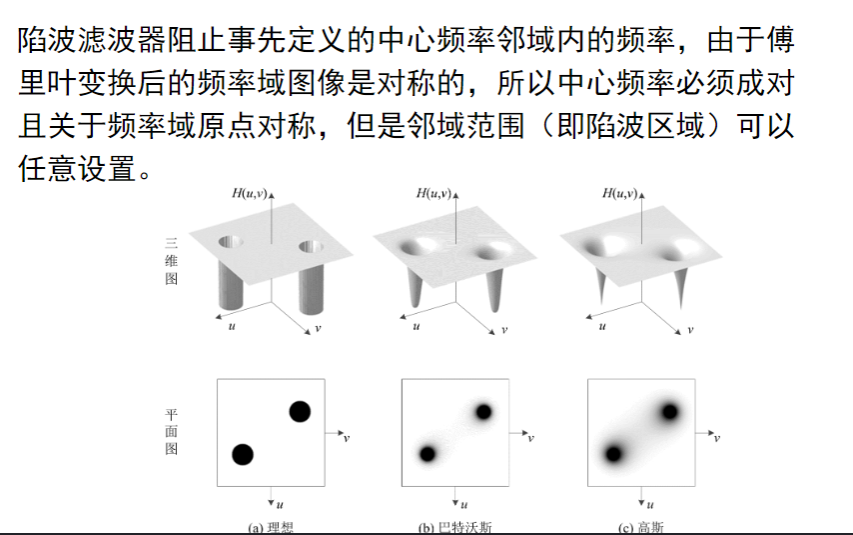
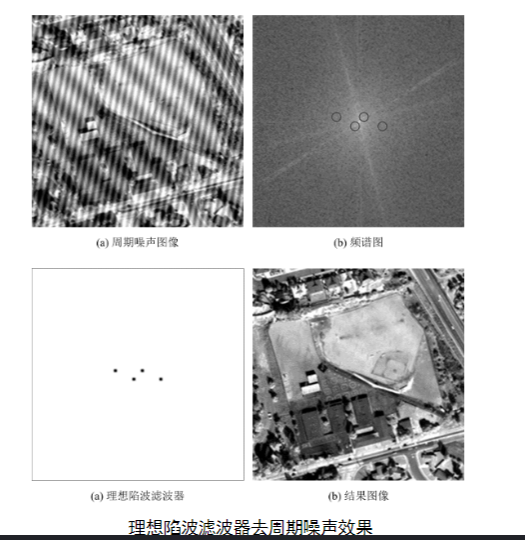
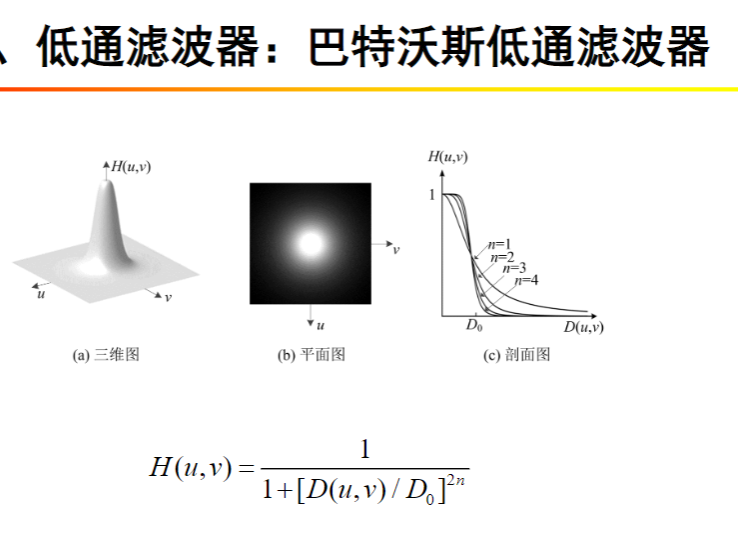
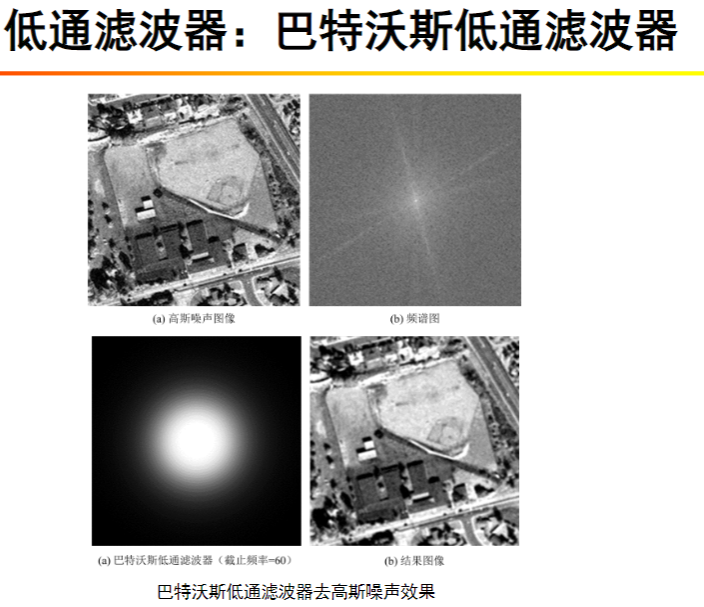
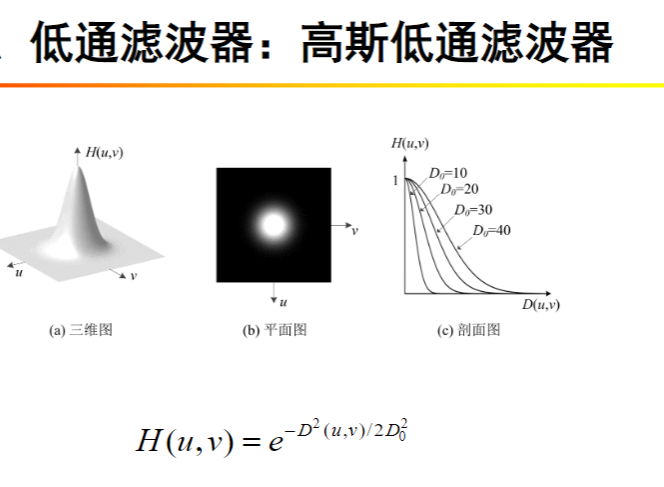
理想-巴特沃斯-高斯滤波器
它们的边界由区分明确到越来越模糊
7.4.2 小波变换去噪声
利用小波变换将高频分解出来,再将高频的系数置为0,然后重构出小波去噪后的图像。
小波变换去噪方法:小波阈值法
硬阈值、软阈值
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-oO2zcZBL-1676622344111)(https://gitee.com/meiruni/image/raw/master/img/image-20220926165059235.png)]
第八章图像增强
图像增强不一定增加了图像信息、图像增强不一定改变了图像的数据内容。
目的是为了改善图像的视觉效果,帮助我们更好的发现或识别图像中的某些特征。
8.1 空间域图像增强
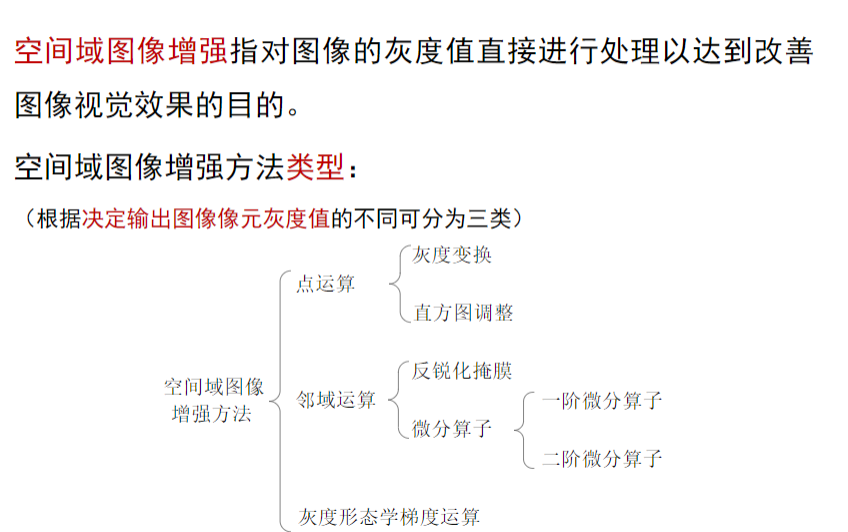
灰度值经过某一种函数,让灰度值变化
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Ou4JOgss-1676622344113)(https://gitee.com/meiruni/image/raw/master/img/image-20220927163514300.png)]
8.1.1变换增强
线性变换
分段线性变换
反比变换
将灰度值取反
幂次变换
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-CChTrcf0-1676622344117)(https://gitee.com/meiruni/image/raw/master/img/image-20220927163821726.png)]
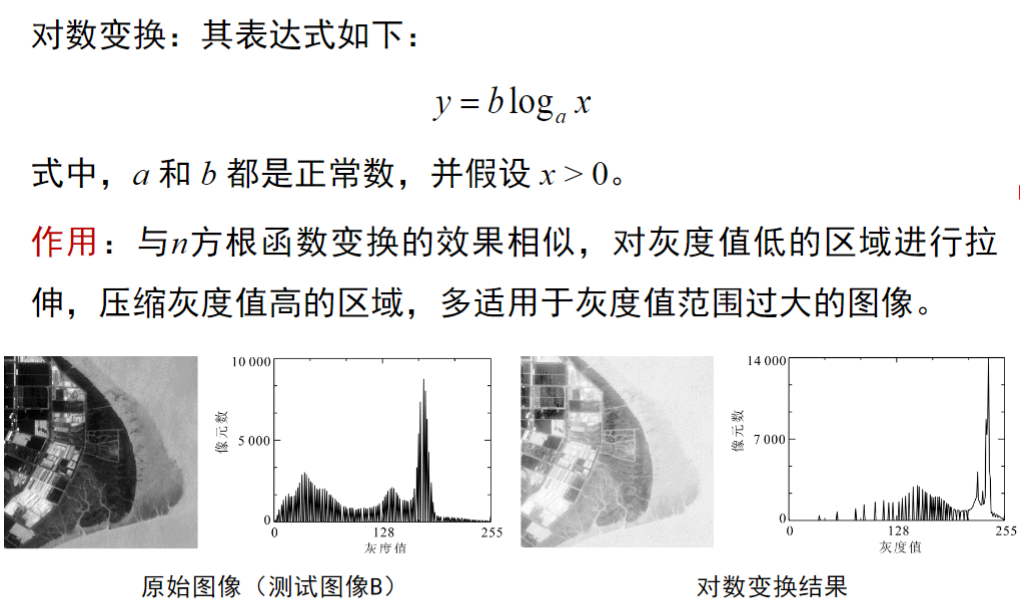
对数变换
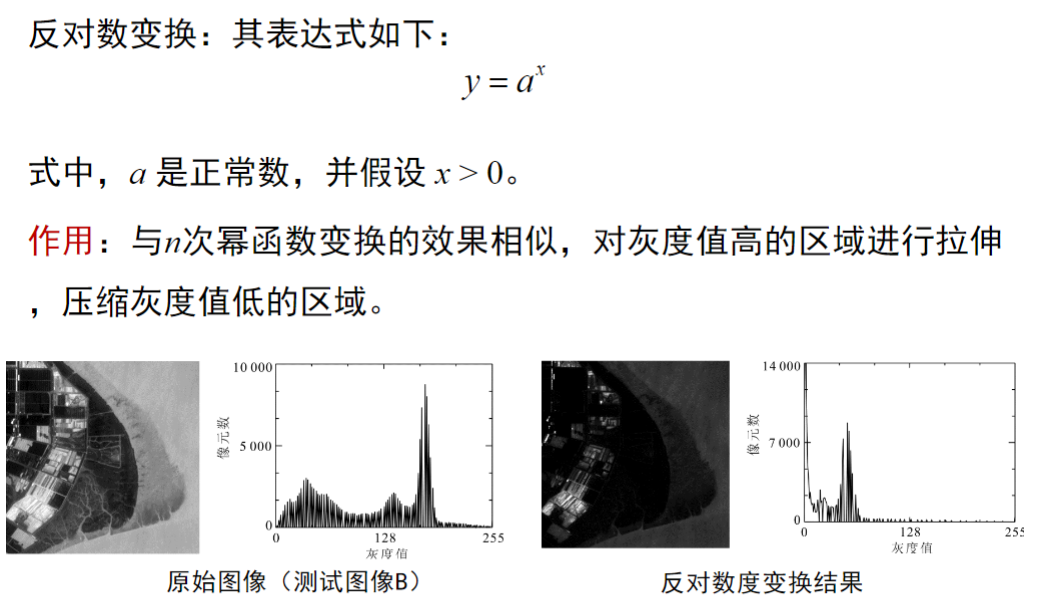
反对数变换
8.1.2 直方图调整图像增强
直方图匹配
将一幅图像的直方图参照另一幅进行变换,使得两幅图的直方图相近或相似。
作用:调整两幅图像的色调差异,使得图像重叠区域的色调过渡柔和,改善图像融合和图像镶嵌效果。
直方图均衡化
对图像进行非线性拉伸,重新分配图像像素值,使一定灰度范围内的像素数量大致相同。
8.1.3 反锐化增强
反锐化掩膜图像增强
-
领域运算图像增强
领域运算中的锐化滤波器,将图像中灰度值缓慢变化的区域滤去,使图像反差增加。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-OpKX1m1J-1676622344119)(https://gitee.com/meiruni/image/raw/master/img/image-20220927170749732.png)]
-
反锐化掩膜图像增强
将图像进行卷积平滑操作,然后将原始图像与平滑操作后的图像相减,就得到了图像边缘信息,再把边缘信息给增大(给它都乘1个数),最后再将边缘信息和原图相加,这样图像边缘信息就增强了。
-
灰度形态学梯度运算图像增强
8.2 变换域图像增强
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-RcldY47n-1676622344121)(https://gitee.com/meiruni/image/raw/master/img/image-20220927163002210.png)]
8.3伪彩色处理
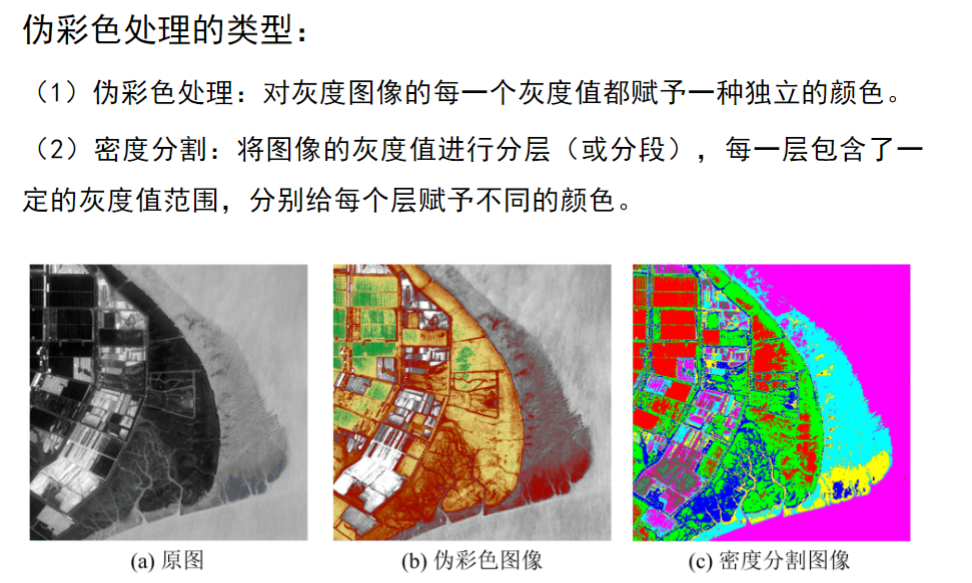
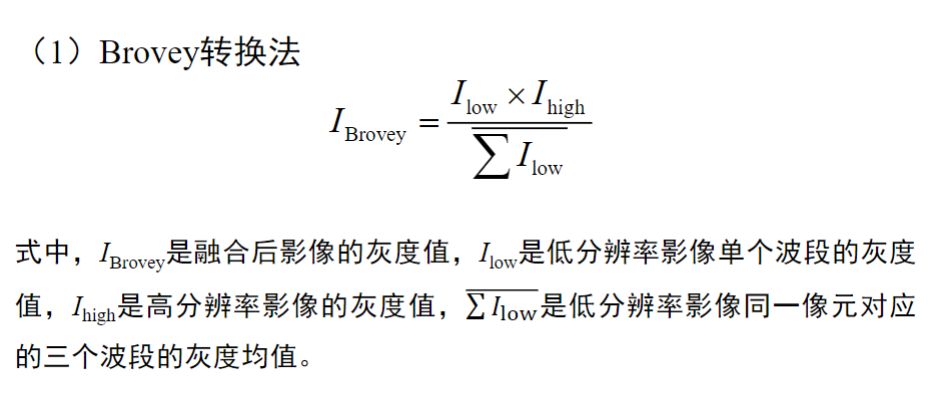
8.4图像融合
图像融合类型3大类:
- 像元(数据)级融合:把分辨率的灰度图与低分辨率的多光谱图像进行融合,从而得到一幅高空间分辨率的彩色合成影像。
- 特征级融合:先对原始图像提取某些特征,比如边缘、纹理特征再来融合。
- 决策级融合:把信息融合在一块,比较抽象
图像融合条件:
-
图像空间信息匹配:空间的位置、图像行列数一致,涉及图像配准和低分辨率影像的重采样
-
图像光谱信息匹配:同名像元点的灰度值具有良好的相关性
最好是同一传感器在同一时间获得的两种影像
图像融合方法:
-
空间域代数转换
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-8jINlMqF-1676622344125)(https://gitee.com/meiruni/image/raw/master/img/image-20220927173955955.png)]
假如低空间分辨率为30米,高空间分辨率为10米,10和30是一个三倍的关系,一个高对应9个低,x方向有3个,y方向有3个,3*3=9,它就是把九个像元灰度值取出来做分母(跳跃窗口)
-
变换域替代法(偷梁换柱法)
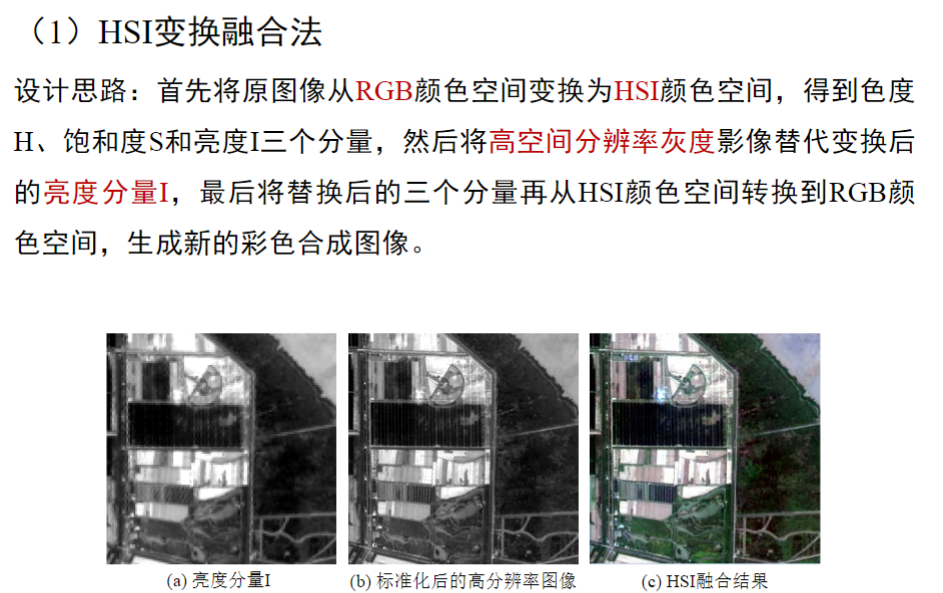
只适用于RGB3个波段
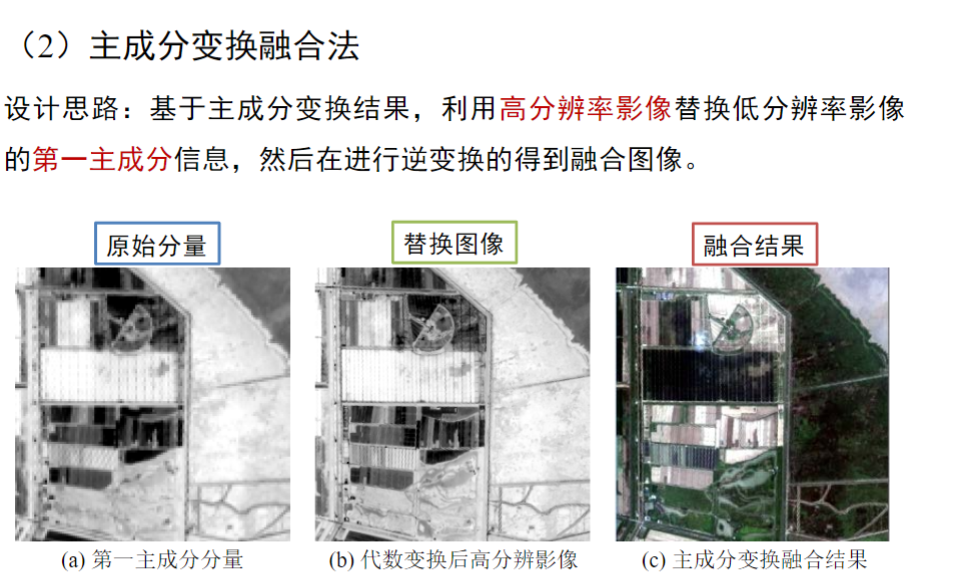
适用于多个波段替换是有条件的,全色波段来替换的时候,要黑白颠倒,做一个反比变换,然后还得把值域范围拉伸到和第一主成分一样,然后替换,最后主成分反变换。
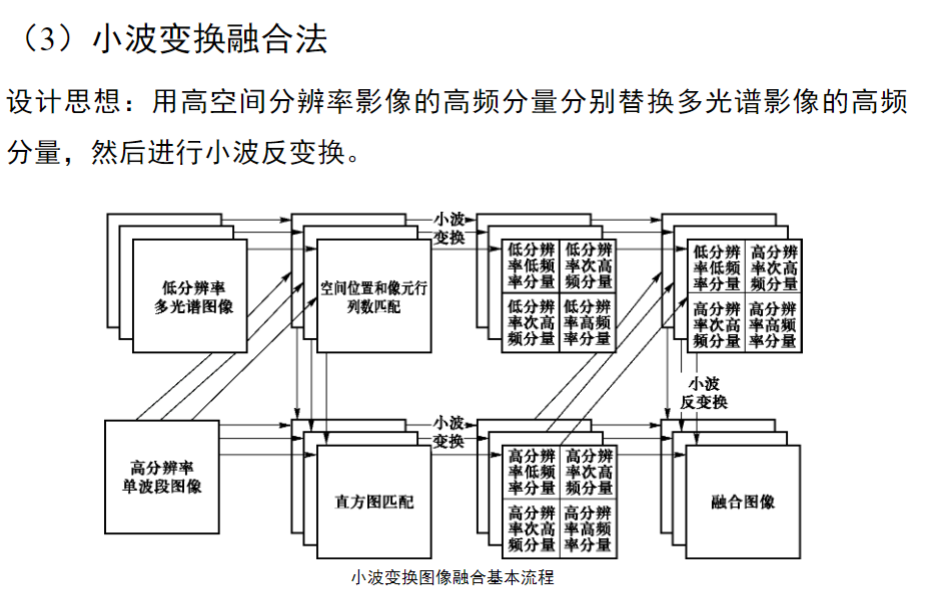
高分辨率图像先和低分辨率图像进行配准,然后挨个波段进行直方图匹配,如果有3个波段,就要匹配3次,得到3个直方图匹配后的结果,然后各自都进行小波变换,把高频替换,最后反变换
第9章 感兴趣目标及对象提取
感兴趣目标是用户最为关注的地方
提取流程
9.1 图像分割
(重点是各类图像分割方法的优缺点)
9.1.1阈值分割法
给定一个灰度值T分割目标区域和灰度区域,如果<T赋值为0,>=T赋值为1
核心:阈值的最优选取
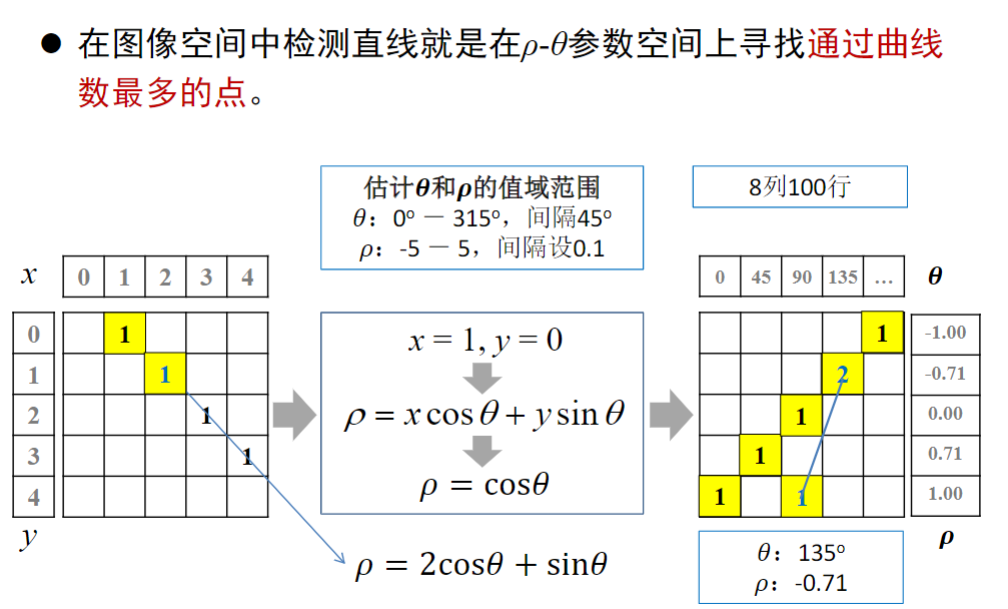
9.1.2 边界分割法
沿着目标周边闭合的边界线将其包围的区域剪切出来
边缘检测方法
-
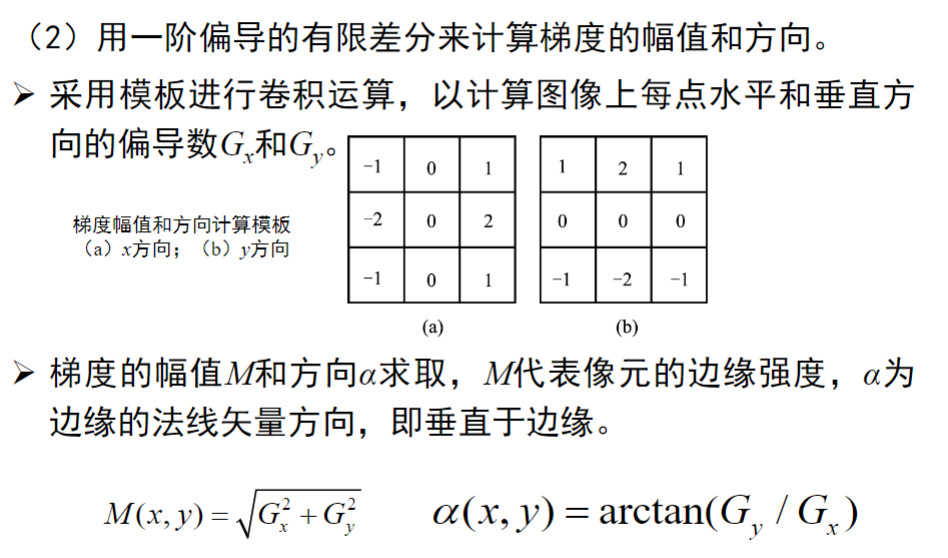
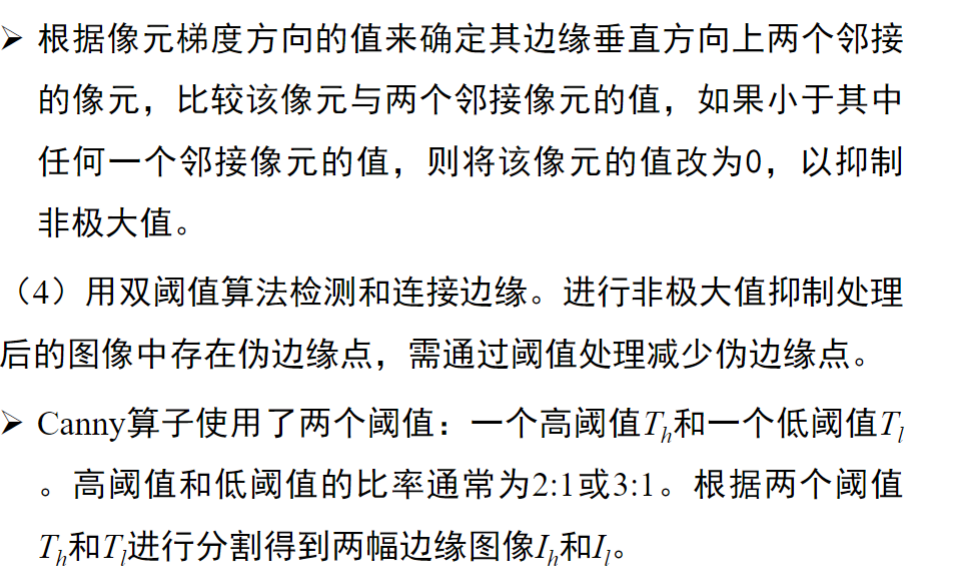
基于微分算子的边缘检测
算梯度值,边缘梯度值高

-
综合边缘检测





-
形态学梯度的边缘检测

边缘连接
9.1.3 区域提取分割法
-
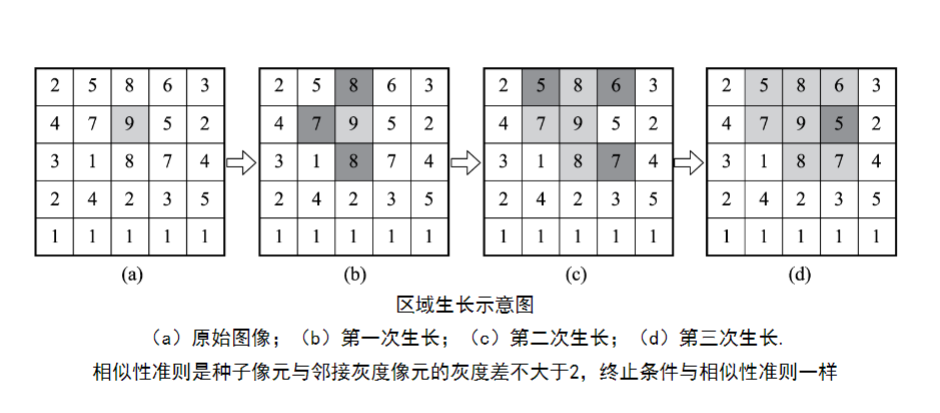
区域生长分割法(是一种迭代方法)
首先在待分割区域选取一小块作为种子区域,然后逐渐将挨着它的与其性质相同或相似的合并进来。
好坏取决于种子点的选取,生长准则和终止条件
种子点的选取
一般通过先验知识选取,如果缺乏先验知识常常借助生长所用准则对图像进行聚类分析
生长准则

终止条件

区域生长法
-
区域分裂合并分割法


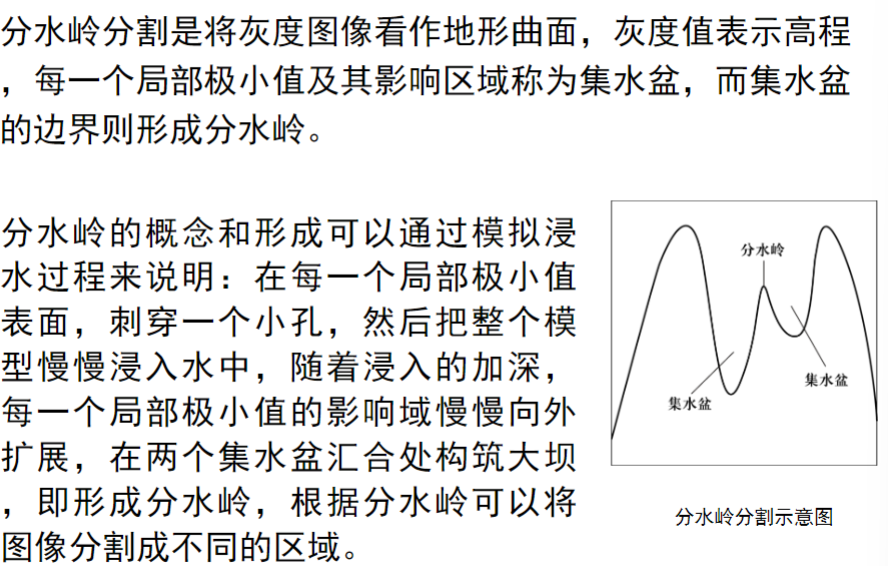
9.1.4 形态学分水岭分割

9.2 二值图像处理
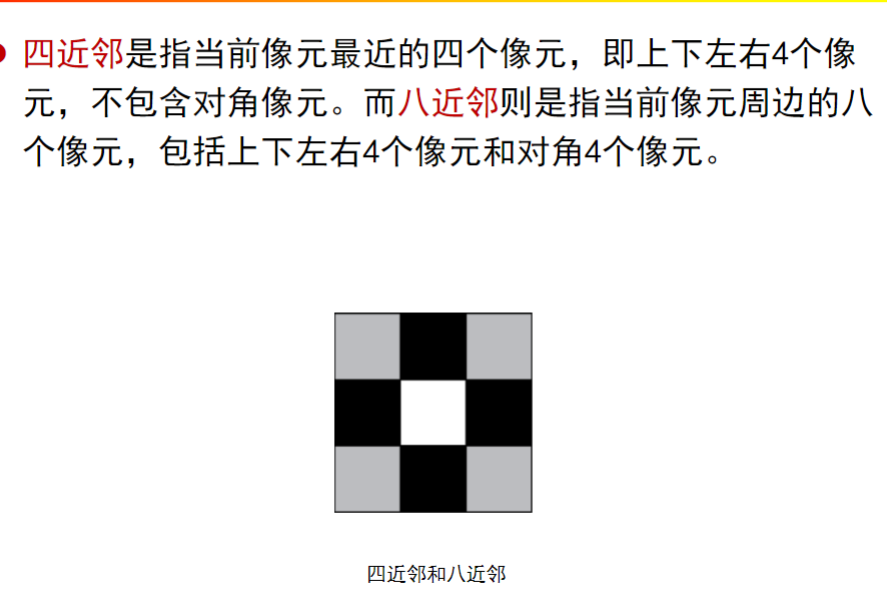
9.2.1四近邻与八近邻
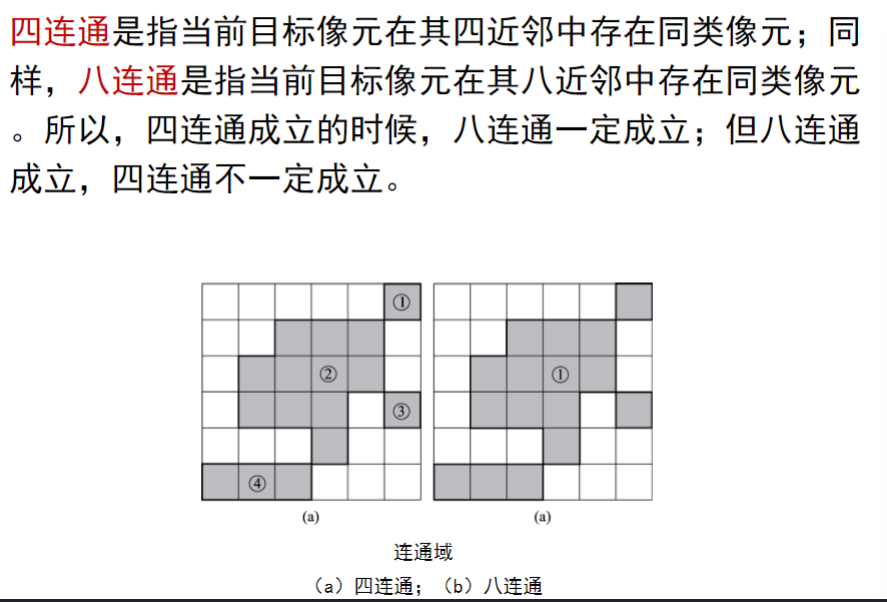
9.2.2四连通和八连通
9.2.3内部点与边界点
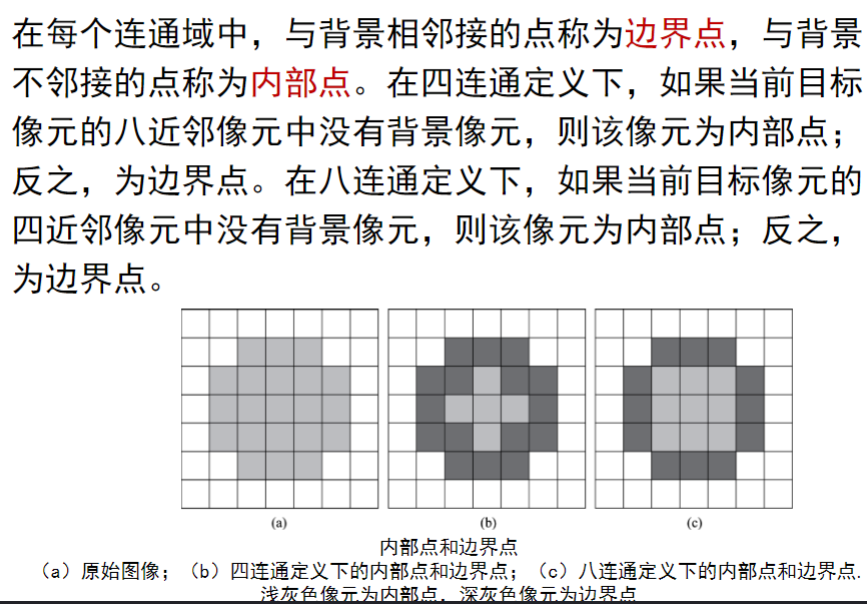
9.2.4 空洞点填补和碎块消除
9.3 对象提取
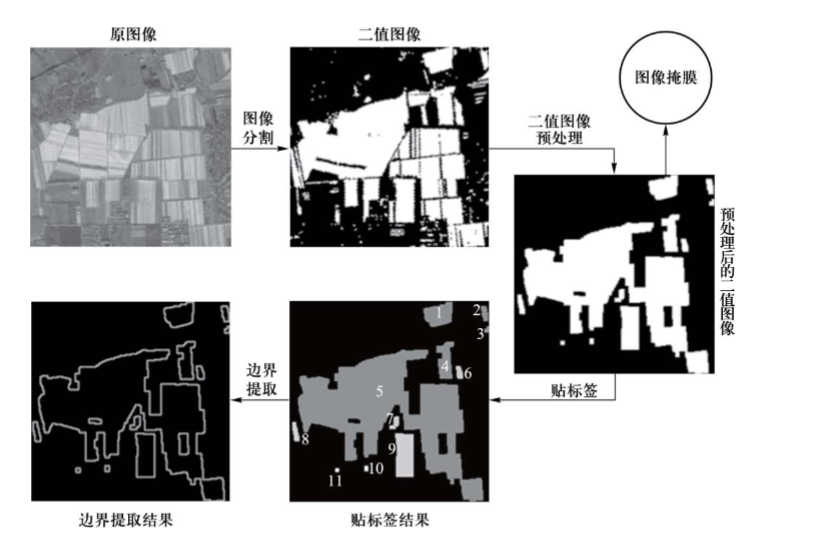
二值图像有多个连通域时,需要给它贴标签
贴标签时得区分四连通域和八连通域

判断其是否属于八连通区域

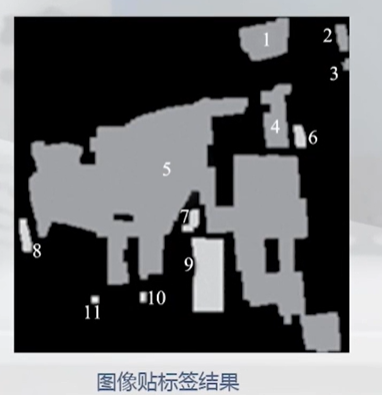
这是贴标签的结果,对于每一个连通域都有一个单独的编号。
如何提取边界?
首先可以用3x3的窗口腐蚀一下,腐蚀后边界就收缩了,它向里面收缩了一个像元,完了之后,用原图像减去腐蚀的结果,实际上也就把边界的像元提取出来了,然后把边界的矢量数据(x,y)坐标找出来,将(x,y)坐标—点与点之间连成线。
master/img/image-20220928143541846.png" alt=“image-20220928143541846” style=“zoom:50%;” />
9.2.3内部点与边界点
9.2.4 空洞点填补和碎块消除
9.3 对象提取
二值图像有多个连通域时,需要给它贴标签
贴标签时得区分四连通域和八连通域
判断其是否属于八连通区域
[外链图片转存中…(img-fvnh8A6L-1676622344130)]
这是贴标签的结果,对于每一个连通域都有一个单独的编号。
如何提取边界?
首先可以用3x3的窗口腐蚀一下,腐蚀后边界就收缩了,它向里面收缩了一个像元,完了之后,用原图像减去腐蚀的结果,实际上也就把边界的像元提取出来了,然后把边界的矢量数据(x,y)坐标找出来,将(x,y)坐标—点与点之间连成线。