核心思想
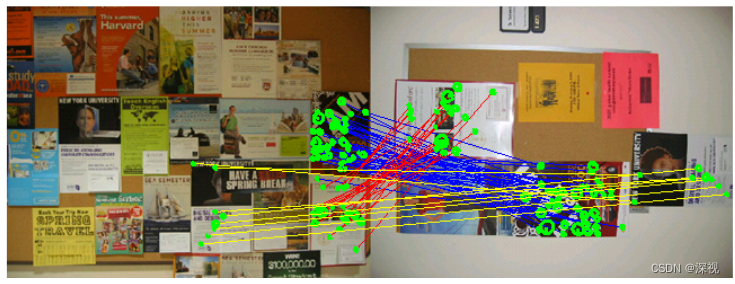
两组点集中共有的匹配区域通常具备两个特点:1.局部的特征相似;2.特征点在空间上的分布也相似。作者将候选匹配点对作为图的节点,将两种相似性统一到边的权重来表示。通过寻找图中稠密连接的子图来寻找两个点集中的匹配区域,如下图所示
实现过程
首先,利用SIFT等算法分别从两幅图像中提取特征点集
P
,
Q
P,Q
P,Q,其中的特征点
p
p
p包含两个特征信息
p
d
,
p
c
p_d,p_c
pd,pc,
p
d
p_d
pd表示由SIFT提取的局部特征向量,
p
c
p_c
pc表示特征点的坐标。内积空间
C
=
P
×
Q
C=P\times Q
C=P×Q表示所有可能的对应关系,每组对应点
c
i
c_i
ci都由一对点
(
i
,
i
′
)
(i,i')
(i,i′)表示,其中
i
∈
P
,
i
′
∈
Q
i\in P, i'\in Q
i∈P,i′∈Q。每组对应点的局部特征相似得分
S
c
i
=
f
1
(
i
d
,
i
d
′
)
S_{c_i}=f_1(i_d,i'_d)
Sci=f1(id,id′),由于匹配点通常局部特征都比较相似,因此仅保留相似得分较大的对应点
M
=
{
c
∣
c
∈
C
,
S
c
>
ϵ
}
M=\{c|c\in C, S_{c}>\epsilon \}
M={c∣c∈C,Sc>ϵ}。
对于两组对应点
c
i
=
(
i
,
i
′
)
c_i=(i,i')
ci=(i,i′)和
c
j
=
(
j
,
j
′
)
c_j=(j,j')
cj=(j,j′),设第一幅图中的点
i
i
i和
j
j
j之间的距离为
l
i
j
l_{ij}
lij,第二幅图中的点
i
′
i'
i′和
j
′
j'
j′之间的距离为
l
i
′
j
′
l_{i'j'}
li′j′。如果它们是两组匹配点,那么我们应该可以通过对第二幅图放缩
l
i
j
/
l
i
′
j
′
l_{ij}/l_{i'j'}
lij/li′j′倍,来使两组点对齐。同理,如果两个公共的匹配区域包含
n
n
n组对应点,那么他们两两之间构成的匹配关系应该有较为接近的放缩系数,而噪点或离群点通常不具备这样的特点。两组对应点之间的几何一致性得分
S
c
i
c
j
(
s
)
=
f
2
(
∣
l
i
j
−
s
l
i
′
j
′
∣
)
S_{c_ic_j}(s)=f_2(|l_{ij}-sl_{i'j'}|)
Scicj(s)=f2(∣lij−sli′j′∣),
s
s
s表示放缩系数。
f
2
(
x
)
f_2(x)
f2(x)是一个非负单调递减函数,本文中取

假设一个对应点集
M
M
M包含
m
m
m组对应点,
M
=
{
c
1
,
c
2
.
.
.
c
m
}
M=\{c_1, c_2...c_m\}
M={c1,c2...cm}。可以构建一个包含
m
m
m个节点的图
G
G
G,每个节点都表示一组对应点,这个图称之为动态对应图(dynamic correspondence graph)。节点
i
i
i和
j
j
j之间的边的权重
w
i
j
w_{ij}
wij可表示为

该权重与放缩系数
s
s
s有关,则加权邻接矩阵
A
(
s
)
A(s)
A(s)可定义为

A
(
s
)
A(s)
A(s)是一个对称的非负矩阵。
对于一个由
n
n
n个特征点构成的共同匹配区域,当选择正确的放缩系数
s
0
s_0
s0时,对应点之间的局部特征相似得分和几何一致性得分应该都很高,即边的权重会较大,那么就对应图
G
G
G中的一个稠密子图
T
T
T。这个稠密子图具备较高的平均类内相似性得分(average intra-cluster affinity score)
S
a
v
(
s
0
)
=
1
n
2
∑
i
∈
T
,
j
∈
T
A
(
i
,
j
)
(
s
0
)
S_{av}(s_0)=\frac{1}{n^2}\sum_{i\in T,j\in T}A(i,j)(s_0)
Sav(s0)=n21∑i∈T,j∈TA(i,j)(s0)。如果使用指示向量
y
y
y来表示
T
T
T,即如果
i
∈
T
i\in T
i∈T,
y
(
i
)
=
1
y(i)=1
y(i)=1否则为
0
0
0。则
S
a
v
(
s
0
)
S_{av}(s_0)
Sav(s0)可表示为
S
a
v
(
s
0
)
=
1
n
2
y
T
A
(
s
0
)
y
=
x
T
A
(
s
0
)
x
S_{av}(s_0)=\frac{1}{n^2}y^TA(s_0)y=x^TA(s_0)x
Sav(s0)=n21yTA(s0)y=xTA(s0)x,其中
x
=
y
/
n
x=y/n
x=y/n。由于
∑
i
y
(
i
)
=
n
\sum_iy(i)=n
∑iy(i)=n,则
∑
i
x
(
i
)
=
1
\sum_ix(i)=1
∑ix(i)=1。
根据Motzkin-Straus定理,下式中的局部极大值点就对应图中的一个最大团

其中

简而言之,作者将寻找图
G
G
G中稠密子图
T
T
T的问题转化为了求解目标函数
f
(
x
)
f(x)
f(x)的局部极大值点的问题。
给定一个放缩系数
s
0
s_0
s0,优化目标函数
f
(
x
)
f(x)
f(x)可能包含许多的局部极大值点,极值点的值越大越有可能对应正确的公共匹配区域。给定一个初始的
x
(
1
)
x(1)
x(1),则
f
(
x
)
f(x)
f(x)的局部极大值点
x
∗
x^*
x∗可通过模仿者等式 (Replicator Equation)得到

通过迭代计算上述等式,当数值收敛于稳定点时,则对应于
f
(
x
)
f(x)
f(x)的一个局部极大值点。
为了找到全部的局部最大值点
{
x
∗
}
\{x^*\}
{x∗},可以提供多个初始化
x
(
1
)
x(1)
x(1)分别进行迭代计算。由于局部最大值点
x
∗
x^*
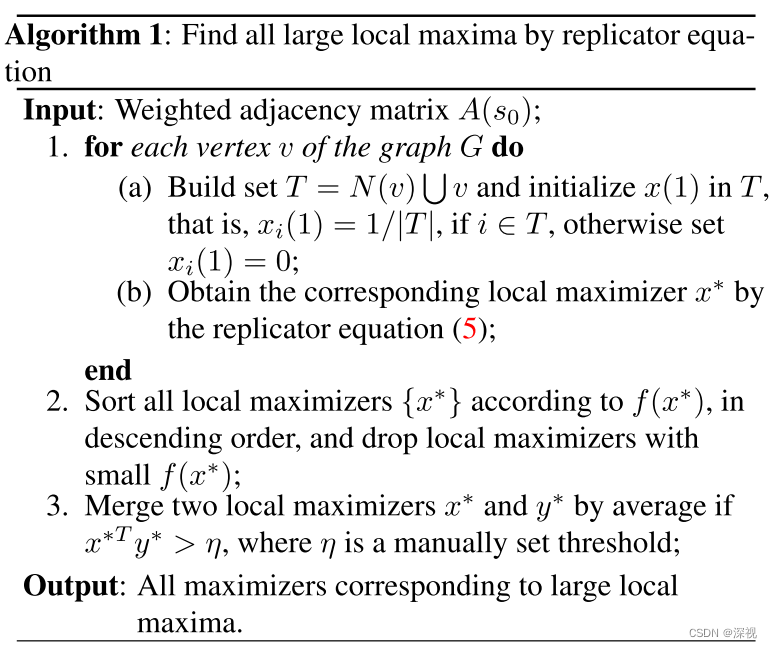
x∗对应于共同匹配区域,因此它具备两个特性:
- 局部性,对于图 G G G中每个节点 v v v,包含 v v v在内的共同匹配区域是 N ( v ) ∪ v N(v)\cup v N(v)∪v的子集, N ( v ) N(v) N(v)表示 v v v的邻域。因此只需要对图 G G G中每个节点 v v v的邻域中对 x ( 1 ) x(1) x(1)进行初始化。
- 非交叉性,两个不同的共同匹配区域通常不会包含公共的顶点。这意味这两个局部极大值点 x ∗ , y ∗ x^*,y^* x∗,y∗,其对应两个不同的共同匹配区域,应满足 x ∗ T y ∗ ≈ 0 x^{*T}y^*\approx 0 x∗Ty∗≈0。
利用上述特性,可以对图
G
G
G中的每个节点及其邻域分别进行初始化,然后通过模仿者等式寻找到该初始化对应的局部极大值点。将所有的局部极大值点进行降序排列,并将极值较小的点舍去。最后,根据
x
∗
T
y
∗
x^{*T}y^*
x∗Ty∗是否大于
η
\eta
η来将局部极大值点进行合并,从而求得最终要保留的局部极大值点,如算法1所示
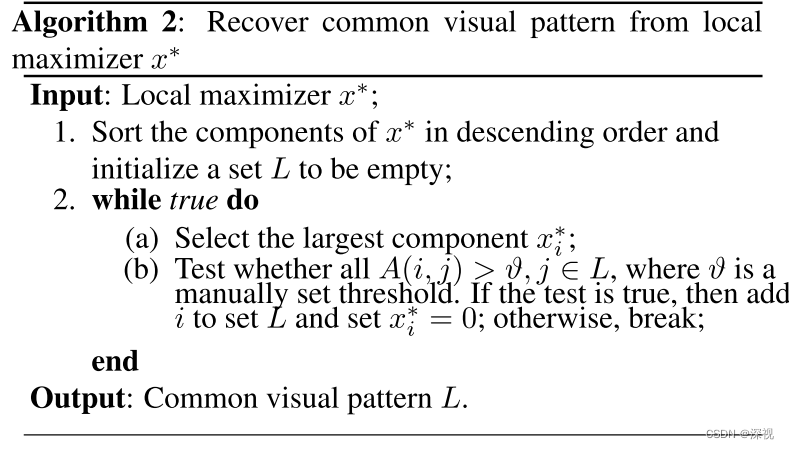
得到局部极大值点还要将其恢复到对应的共同匹配区域,
x
∗
x^*
x∗中的每个点
x
i
∗
x_i^*
xi∗表示对应点
i
i
i是正确匹配点的概率,可以通过算法2得到共同匹配区域
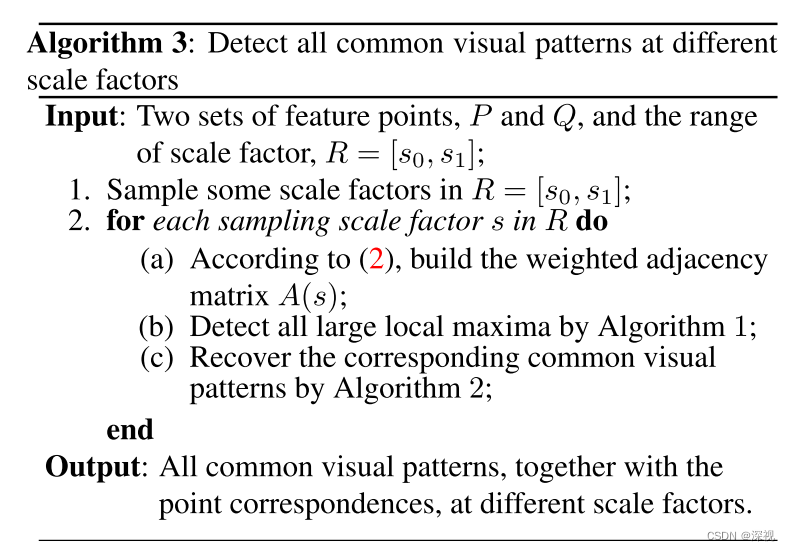
在实际应用中,放缩系数
s
s
s通常属于一个范围
R
=
[
s
0
,
s
1
]
R=[s_0,s_1]
R=[s0,s1],因此可以通过在该范围内均匀采样得到
s
s
s,然后分别计算不同放缩系数条件下对应的共同匹配区域,如算法3所示
创新点
- 将特征点的匹配问题转化为了寻找图的最大团问题
- 利用共同匹配区域的局部性和非交叉性来优化求解过程
算法总结
作者关注的是寻找两幅图中局部的共同匹配区域问题,并且非常巧妙地将其转化为了寻找图的最大团问题,并利用了共同匹配区域的局部性和非交叉性来优化求解过程,使其能够更好更快地求解。该方法还有一个优势是可以解决一对一、一对多和多对多的匹配问题,这在应用中具备很高的价值。