来源:投稿 作者:175
编辑:学姐
往期内容:
从零实现深度学习框架1:RNN从理论到实战(理论篇)
从零实现深度学习框架2:RNN从理论到实战(实战篇)
从零实现深度学习框架3:再探多层双向RNN的实现(本篇)
在前面的文章中,我们实现了多层、双向RNN。但是这几天一直在思考,这种实现方式是不是有问题。因为RNN的实现关乎后面ELMo和seq2seq,所以不得不重视。
双向RNN的实现方式
以两层双向RNN为例。我们之前实现的方式类似如下图所示:
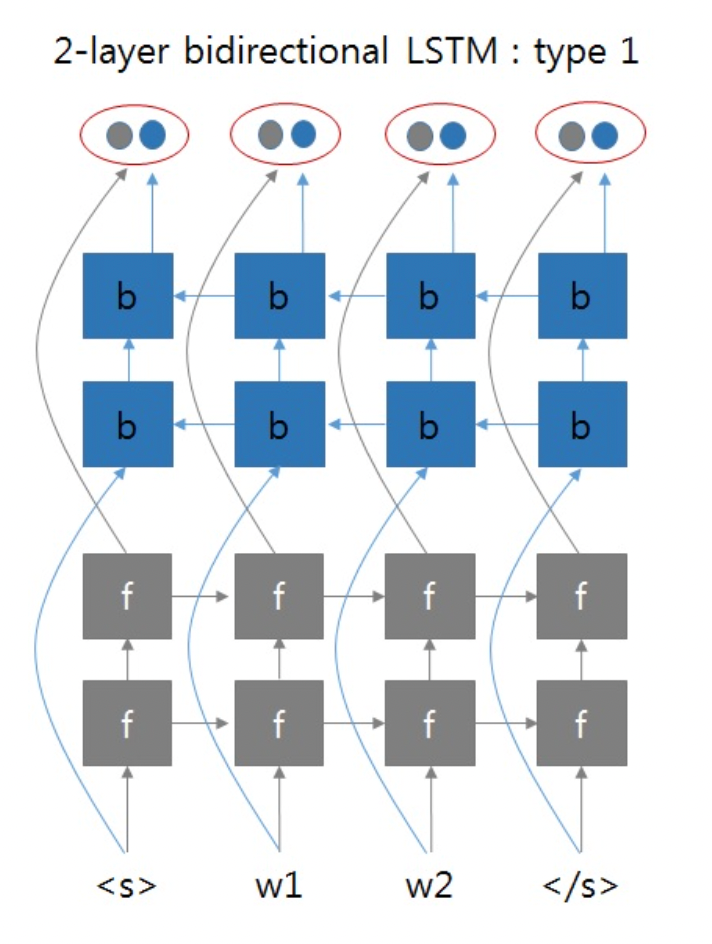
这两张图片来自于:https://github.com/pytorch/pytorch/issues/4930#issuecomment-361851298
就是正向RNN和反向RNN可以看成是两个独立的两层RNN网络,最终拼接了它们的输出。但是总感觉双向RNN不会这么简单,带着这个疑问去拜读了双向RNN的论文1,得到下面的这张图片:
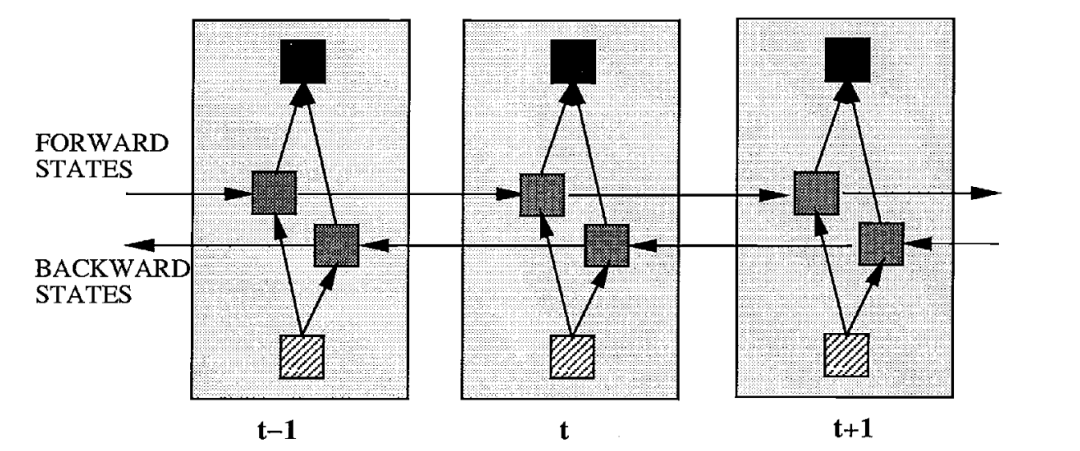
如果采用这种方式的话,那么两层双向RNN的实现应该像下图这样:
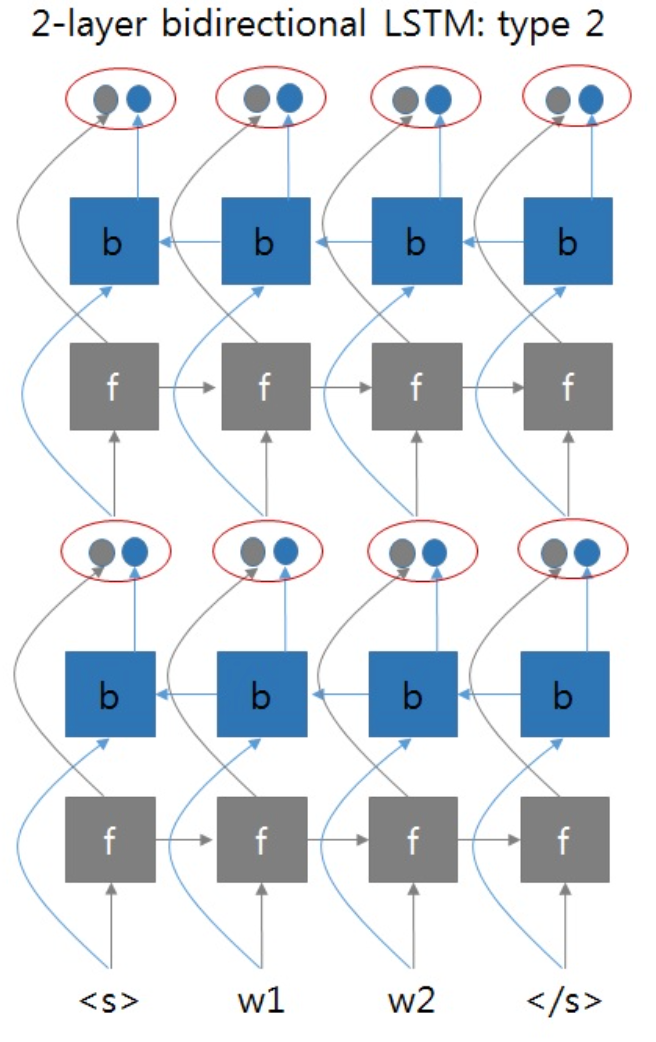
即第一层BRNN的输出同时考虑了正向和方向输出,将它们拼接在一起,作为第二层BRNN的输入。
但是这时遇到了一个问题,如果这样实现的话,那么输出的维度会怎样呢?BRNN中每层参数的维度会产生怎样的变化呢?
遇事不决找Torch,我们摸着PyTorch过河。
带着这个问题,我们去看PyTorch的文档,并查阅资料,梳理一下PyTorch实现的RNN(GRU、LSTM)中各种输入、输出、隐藏状态的维度。
理解RNN中的各种维度
以RNN为例,为什么不以最复杂的LSTM为例呢?因为LSTM参数过多,相比RNN太过复杂,不太容易理解。柿子要挑软的捏,我们理解了RNN,再去理解GRU或LSTM就会简单多了。
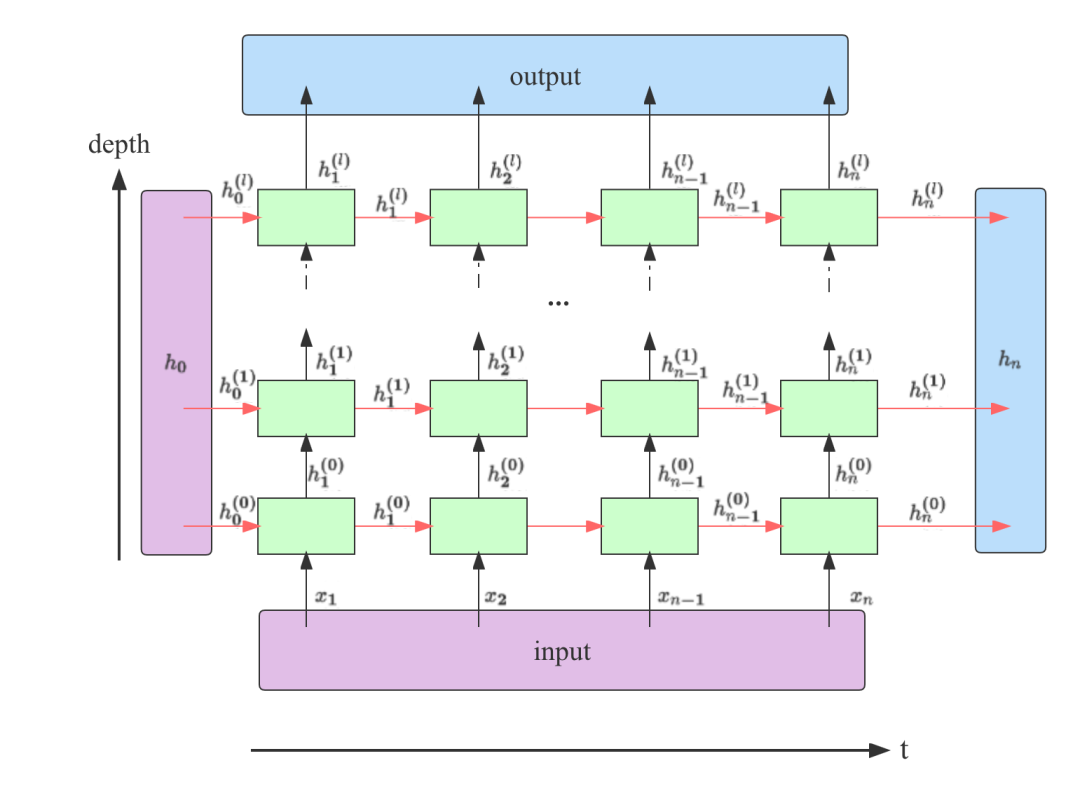
此图片参考了https://stackoverflow.com/a/48305882
从上图可以看出,在一个堆叠了l层的RNN中,output包含了最后一层RNN输出的所有隐藏状态;h_n包含了最后一个时间步上所有层的输出。
我们知道了它们的构成方式,下面看一下它们和上图中另外两个参数input和h_0在不同类型的RNN中维度如何2。
-
inputRNN的输入序列。若batch_first=False,则其大小为(seq_len, batch_size, input_size);若batch_first=True,则其大小为(batch_size, seq_len, input_size); -
h_0RNN的初始隐藏状态,可以为空。大小为(num_layers * num_directions, batch_size, hidden_size); -
outputRNN最后一层所有时间步的输出。若batch_first=False,则其大小为(seq_len, batch_size, num_directions * hidden_size);若batch_first=True,则其大小为(batch_size, seq_len, num_directions * hidden_size); -
h_nRNN中所有层最后一个时间步的隐藏状态。其大小为(num_layers * num_directions, batch_size, hidden_size)。不受batch_first的影响,其批次维度表现和batch_first=False一样。后面以代码实现的角度解释下为何这样,不代表官方的意图。
其中seq_len表示输入序列长度;batch_size表示批次大小;input_size表示输入的特征数量;num_layers表示层数;num_directions表示方向个数,单向RNN时为1,双向RNN时为2;hidden_size表示隐藏状态的特征数。
的形状应该和
是一致的。
下面我们进行验证,首先看一下初始参数:
# 输入大小
INPUT_SIZE = 2
# 序列长度
SEQ_LENGTH = 5
# 隐藏大小
HIDDEN_SIZE = 3
# 批大小
BATCH_SIZE = 4
以及输入:
inputs = Tensor.randn(BATCH_SIZE, SEQ_LENGTH, INPUT_SIZE)
简单RNN
简单RNN就是单向单层RNN:
rnn = nn.RNN(input_size=INPUT_SIZE, hidden_size=HIDDEN_SIZE, num_layers=1, batch_first=True)
output, h_n = rnn(inputs)
print(f'Input Shape: {inputs.shape} ')
print(f'Output Shape: {output.shape} ')
print(f'Hidden Shape: {h_n.shape} ')
-
inputs维度是我们预先定理好的,注意这里batch_first=True,所以inputs的第一个维度是批大小。 -
output来自最后一层所有时间步的输出,时间步长度为5,包含整个批次内4条数据,每条数据的输出维度为3,可以理解为3分类问题。 -
$h_n$来自单层最后一个时间步的隐藏状态,包含整个批次内4条数据,每条数据的输出维度为3。
Input Shape: (4, 5, 2)
Output Shape: (4, 5, 3)
Hidden Shape: (1, 4, 3)
堆叠RNN
如果将层数改成3,我们就得到了3层RNN堆叠在一起的架构,来看下此时output和h_n的维度会发生怎样的变化。
rnn = nn.RNN(input_size=INPUT_SIZE, hidden_size=HIDDEN_SIZE, num_layers=3, batch_first=True)
output, h_n = rnn(inputs)
print(f'Input Shape: {inputs.shape} ')
print(f'Output Shape: {output.shape} ')
print(f'Hidden Shape: {h_n.shape} ')
Input Shape: (4, 5, 2)
Output Shape: (4, 5, 3)
Hidden Shape: (3, 4, 3)
-
output来自最后一层所有时间步的输出,时间步长度为5,包含整个批次内4条数据,每条数据的输出维度为3。其维度保持不变。 -
h_n来自所有三层最后一个时间步的隐藏状态,包含整个批次内4条数据,每条数据的输出维度为3。可以看到,其输出的第一个维度大小由1变成了3,因为包含了3层的结果。
双向RNN
传入bidirectional=True,并将层数改回单层。
rnn = nn.RNN(input_size=INPUT_SIZE, hidden_size=HIDDEN_SIZE, num_layers=1, batch_first=True, bidirectional=True)
output, h_n = rnn(inputs)
print(f'Input Shape: {inputs.shape} ')
print(f'Output Shape: {output.shape} ')
print(f'Hidden Shape: {h_n.shape} ')
Input Shape: (4, 5, 2)
Output Shape: (4, 5, 6)
Hidden Shape: (2, 4, 3)
-
output来自最后一层所有时间步的输出,时间步长度为5,包含整个批次内4条数据,每条数据的输出维度为3,由于是双向,包含了两个方向上的结果,在此维度上进行堆叠,所以由3变成了6。 -
h_n最后一个时间步的隐藏状态,包含整个批次内4条数据,每条数据的输出维度为3。第一个维度由1变成了2,因为在此维度上堆叠了双向的结果。
它们都包含了双向的结果,那如果想分别得到每个方向上的结果,要怎么做呢?
对于output。若batch_first=True,将output按照out.reshape(shape=(batch_size, seq_len, num_directions, hidden_size))进行变形,正向和反向的维度值为别为0和1。
对于h_n,按照h_n.reshape(shape=(num_layers, num_directions, batch_size, hidden_size)),正向和反向的维度值为别为0和1。
我们来对output进行拆分:
# batch_first=True
output_reshaped = output.reshape((BATCH_SIZE, SEQ_LENGTH, 2, HIDDEN_SIZE))
print("Shape of the output after directions are separated: ", output_reshaped.shape)
# 分别获取正向和反向的输出
output_forward = output_reshaped[:, :, 0, :]
output_backward = output_reshaped[:, :, 1, :]
print("Forward output Shape: ", output_forward.shape)
print("Backward output Shape: ", output_backward.shape)
Shape of the output after directions are separated: (4, 5, 2, 3)
Forward output Shape: (4, 5, 3)
Backward output Shape: (4, 5, 3)
对h_n进行拆分:
# 1: 层数 2: 方向数
h_n_reshaped = h_n.reshape((1, 2, BATCH_SIZE, HIDDEN_SIZE))
print("Shape of the hidden after directions are separated: ", h_n_reshaped.shape)
h_n_forward = h_n_reshaped[:, 0, :, :]
h_n_backward = h_n_reshaped[:, 1, :, :]
print("Forward h_n Shape: ", h_n_forward.shape)
print("Backward h_n Shape: ", h_n_backward.shape)
Shape of the hidden after directions are separated: (1, 2, 4, 3)
Forward h_n Shape: (1, 4, 3)
Backward h_n Shape: (1, 4, 3)
堆叠双向RNN
设置bidirectional=True,并将层数设成3层。
rnn = nn.RNN(input_size=INPUT_SIZE, hidden_size=HIDDEN_SIZE, num_layers=3, batch_first=True, bidirectional=True)
output, h_n = rnn(inputs)
print(f'Input Shape: {inputs.shape} ')
print(f'Output Shape: {output.shape} ')
print(f'Hidden Shape: {h_n.shape} ')
Input Shape: (4, 5, 2)
Output Shape: (4, 5, 6)
Hidden Shape: (6, 4, 3)
-
output来自最后一层所有时间步的输出,时间步长度为5,包含整个批次内4条数据,每条数据的输出维度为3,由于是双向,包含了两个方向上的结果,在此维度上进行堆叠,所以由3变成了6。 -
h_n来自所有三层最后一个时间步的隐藏状态,包含整个批次内4条数据,每条数据的输出维度为3。第一个维度由变成了6,因为三层输出在此维度上堆叠了双向的结果。
如果我们也对它们按方向进行拆分的话。
首先对output拆分:
# batch_first=True
output_reshaped = output.reshape((BATCH_SIZE, SEQ_LENGTH, 2, HIDDEN_SIZE))
print("Shape of the output after directions are separated: ", output_reshaped.shape)
# 分别获取正向和反向的输出
output_forward = output_reshaped[:, :, 0, :]
output_backward = output_reshaped[:, :, 1, :]
print("Forward output Shape: ", output_forward.shape)
print("Backward output Shape: ", output_backward.shape)
Shape of the output after directions are separated: (4, 5, 2, 3)
Forward output Shape: (4, 5, 3)
Backward output Shape: (4, 5, 3)
其次对h_out拆分:
# 3: 层数 2: 方向数
h_n_reshaped = h_n.reshape((3, 2, BATCH_SIZE, HIDDEN_SIZE))
print("Shape of the hidden after directions are separated: ", h_n_reshaped.shape)
h_n_forward = h_n_reshaped[:, 0, :, :]
h_n_backward = h_n_reshaped[:, 1, :, :]
print("Forward h_n Shape: ", h_n_forward.shape)
print("Backward h_n Shape: ", h_n_backward.shape)
Shape of the hidden after directions are separated: (3, 2, 4, 3)
Forward h_n Shape: (3, 4, 3)
Backward h_n Shape: (3, 4, 3)
重构双向RNN的实现

我们按照对每层输出状态进行拼接的方式来重构多层双向RNN。
这里有一个问题是,由于我们对隐藏状态进行了拼接, 其维度变成了(n_steps, batch_size, num_directions * hidden_size)。
受到了PyTorch官网启发:
-
~RNN.weight_ih_l[k] – the learnable input-hidden weights of the k-th layer, of shape (hidden_size, input_size) for k = 0. Otherwise, the shape is (hidden_size, num_directions * hidden_size)
-
~RNN.weight_hh_l[k] – the learnable hidden-hidden weights of the k-th layer, of shape (hidden_size, hidden_size)
所以,我们相应地改变输入到隐藏状态的维度:(hidden_size, num_directions * hidden_size)。
我们说 h_n的输出维度不受batch_first的影响,其批次维度表现和batch_first=False一样。这是因为在实现时,为了统一,将input的时间步放到了第1个维度,将批大小放到中间,input就像batch_first=False一样,而隐藏状态的方式和它保持一致即可。
if self.batch_first:
batch_size, n_steps, _ = input.shape
input = input.transpose((1, 0, 2)) # 将batch放到中间维度
下面看具体实现:
RNNCellBase
class RNNCellBase(Module):
def reset_parameters(self) -> None:
stdv = 1.0 / math.sqrt(self.hidden_size) if self.hidden_size > 0 else 0
for weight in self.parameters():
init.uniform_(weight, -stdv, stdv)
def __init__(self, input_size, hidden_size: int, num_chunks: int, bias: bool = True, num_directions=1,
reset_parameters=True, device=None, dtype=None) -> None:
'''
RNN单时间步的抽象
:param input_size: 输入x的特征数
:param hidden_size: 隐藏状态的特征数
:param bias: 线性层是否包含偏置
:param nonlinearity: 非线性激活函数 tanh | relu (mode = RNN)
'''
factory_kwargs = {'device': device, 'dtype': dtype}
super(RNNCellBase, self).__init__()
self.input_size = input_size
self.hidden_size = hidden_size
# 输入x的线性变换
self.input_trans = Linear(num_directions * input_size, num_chunks * hidden_size, bias=bias, **factory_kwargs)
# 隐藏状态的线性变换
self.hidden_trans = Linear(hidden_size, num_chunks * hidden_size, bias=bias, **factory_kwargs)
if reset_parameters:
self.reset_parameters()
def extra_repr(self) -> str:
s = 'input_size={input_size}, hidden_size={hidden_size}'
if 'bias' in self.__dict__ and self.bias is not True:
s += ', bias={bias}'
if 'nonlinearity' in self.__dict__ and self.nonlinearity != "tanh":
s += ', nonlinearity={nonlinearity}'
return s.format(**self.__dict__)
RNNCell
class RNNCell(RNNCellBase):
def __init__(self, input_size, hidden_size: int, bias: bool = True, nonlinearity: str = 'tanh', num_directions=1,
reset_parameters=True, device=None, dtype=None):
factory_kwargs = {'device': device, 'dtype': dtype, 'reset_parameters': reset_parameters}
super(RNNCell, self).__init__(input_size, hidden_size, num_chunks=1, bias=bias, num_directions=num_directions,
**factory_kwargs)
if nonlinearity == 'tanh':
self.activation = F.tanh
else:
self.activation = F.relu
def forward(self, x: Tensor, h: Tensor, c: Tensor = None) -> Tuple[Tensor, None]:
h_next = self.activation(self.input_trans(x) + self.hidden_trans(h))
return h_next, None
在RNNCell的forward中也返回了一个元组,元组中第二个元素代表了c_next,为了兼容LSTM的实现。
RNNBase
class RNNBase(Module):
def __init__(self, cell: RNNCellBase, input_size: int, hidden_size: int, batch_first: bool = False,
num_layers: int = 1, bidirectional: bool = False, bias: bool = True, dropout: float = 0,
reset_parameters=True, device=None, dtype=None) -> None:
'''
:param input_size: 输入x的特征数
:param hidden_size: 隐藏状态的特征数
:param batch_first: 批次维度是否在前面
:param num_layers: 层数
:param bidirectional: 是否为双向
:param bias: 线性层是否包含偏置
:param dropout: 用于多层堆叠RNN,默认为0代表不使用dropout
:param reset_parameters: 是否执行reset_parameters
:param device:
:param dtype:
'''
super(RNNBase, self).__init__()
factory_kwargs = {'device': device, 'dtype': dtype, 'reset_parameters': reset_parameters}
self.num_layers = num_layers
self.hidden_size = hidden_size
self.input_size = input_size
self.batch_first = batch_first
self.bidirectional = bidirectional
self.bias = bias
self.num_directions = 2 if self.bidirectional else 1
# 支持多层
self.cells = ModuleList([cell(input_size, hidden_size, bias, **factory_kwargs)] +
[cell(hidden_size, hidden_size, bias, num_directions=self.num_directions,
**factory_kwargs) for _ in
range(num_layers - 1)])
if self.bidirectional:
# 支持双向
self.back_cells = copy.deepcopy(self.cells)
self.dropout = dropout
if dropout != 0:
# Dropout层
self.dropout_layer = Dropout(dropout)
def _one_directional_op(self, input, n_steps, cell, h, c) -> Tuple[Tensor, Tensor, Tensor]:
hs = []
# 沿着input时间步进行遍历
for t in range(n_steps):
inp = input[t]
h, c = cell(inp, h, c)
hs.append(h)
return h, c, F.stack(hs)
def _handle_hidden_state(self, input, state):
assert input.ndim == 3 # 必须传入批数据,最小批大小为1
if self.batch_first:
batch_size, n_steps, _ = input.shape
input = input.transpose((1, 0, 2)) # 将batch放到中间维度
else:
n_steps, batch_size, _ = input.shape
if state is None:
h = Tensor.zeros((self.num_layers * self.num_directions, batch_size, self.hidden_size), dtype=input.dtype,
device=input.device)
else:
h = state
# 得到每层的状态
hs = list(F.unbind(h)) # 按层数拆分h
return hs, [None] * len(hs), input, n_steps, batch_size
def forward(self, input: Tensor, state: Tensor) -> Tuple[Tensor, Tensor, Tensor]:
'''
RNN的前向传播
:param input: 形状 [n_steps, batch_size, input_size] 若batch_first=False
:param state: (隐藏状态,单元状态)元组, 每个元素形状 [num_layers, batch_size, hidden_size]
:return:
num_directions = 2 if self.bidirectional else 1
output: (n_steps, batch_size, num_directions * hidden_size)若batch_first=False 或
(batch_size, n_steps, num_directions * hidden_size)若batch_first=True
包含每个时间步最后一层(多层RNN)的输出h_t
h_n: (num_directions * num_layers, batch_size, hidden_size) 包含最终隐藏状态
c_n: (num_directions * num_layers, batch_size, hidden_size) 包含最终单元状态(LSTM);非LSTM为None
'''
hs, cs, input, n_steps, batch_size = self._handle_hidden_state(input, state)
# 正向得到的h_n,反向得到的h_n,正向得到的c_n,反向得到的c_n
h_n_f, h_n_b, c_n_f, c_n_b = [], [], [], []
for layer in range(self.num_layers):
h, c, hs_f = self._one_directional_op(input, n_steps, self.cells[layer], hs[layer], cs[layer])
h_n_f.append(h) # 保存最后一个时间步的隐藏状态
c_n_f.append(c)
if self.bidirectional:
h, c, hs_b = self._one_directional_op(F.flip(input, 0), n_steps, self.back_cells[layer],
hs[layer + self.num_layers], cs[layer + self.num_layers])
hs_b = F.flip(hs_b, 0) # 将输出时间步维度逆序,使得时间步t=0上,是看了整个序列的结果。
# 拼接两个方向上的输入
h_n_b.append(h)
c_n_b.append(c)
input = F.cat([hs_f, hs_b], 2) # (n_steps, batch_size, num_directions * hidden_size)
else:
input = hs_f # (n_steps, batch_size, num_directions * hidden_size)
# 在第1层之后,最后一层之前需要经过dropout
if self.dropout and layer != self.num_layers - 1:
input = self.dropout_layer(input)
output = input # (n_steps, batch_size, num_directions * hidden_size) 最后一层最后计算的输入,就是它的输出
c_n = None
if self.bidirectional:
h_n = F.cat([F.stack(h_n_f), F.stack(h_n_b)], 0)
if c is not None:
c_n = F.cat([F.stack(c_n_f), F.stack(c_n_b)], 0)
else:
h_n = F.stack(h_n_f)
if c is not None:
c_n = F.stack(c_n_f)
if self.batch_first:
output = output.transpose((1, 0, 2))
return output, h_n, c_n
def extra_repr(self) -> str:
s = 'input_size={input_size}, hidden_size={hidden_size}'
if self.num_layers != 1:
s += ', num_layers={num_layers}'
if self.bias is not True:
s += ', bias={bias}'
if self.batch_first is not False:
s += ', batch_first={batch_first}'
if self.dropout:
s += ', dropout={dropout}'
if self.bidirectional is not False:
s += ', bidirectional={bidirectional}'
return s.format(**self.__dict__)
同样,做了兼容LSTM的实现,会多了一些if判断。
RNN
class RNN(RNNBase):
def __init__(self, *args, **kwargs) -> None:
'''
:param input_size: 输入x的特征数
:param hidden_size: 隐藏状态的特征数
:param batch_first:
:param num_layers: 层数
:param bidirectional: 是否为双向
:param bias: 线性层是否包含偏置
:param dropout: 用于多层堆叠RNN,默认为0代表不使用dropout
:param nonlinearity: 非线性激活函数 tanh | relu
'''
super(RNN, self).__init__(RNNCell, *args, **kwargs)
def forward(self, input: Tensor, state: Tensor = None) -> Tuple[Tensor, Tensor]:
output, h_n, _ = super().forward(input, state)
return output, h_n
因为基类RNNBase的forward会返回output,h_n,c_n,所以RNN这里重写了forward方法,仅返回output和h_n。
通过这种方式实现GRU和RNN非常类似。
GRU
class GRU(RNNBase):
def __init__(self, *args, **kwargs):
'''
:param input_size: 输入x的特征数
:param hidden_size: 隐藏状态的特征数
:param batch_first:
:param num_layers: 层数
:param bidirectional: 是否为双向
:param bias: 线性层是否包含偏置
:param dropout: 用于多层堆叠RNN,默认为0代表不使用dropout
'''
super(GRU, self).__init__(GRUCell, *args, **kwargs)
def forward(self, input: Tensor, state: Tensor = None) -> Tuple[Tensor, Tensor]:
output, h_n, _ = super().forward(input, state)
return output, h_n
实例测试
同样的配置下:
embedding_dim = 128
hidden_dim = 128
batch_size = 32
num_epoch = 10
n_layers = 2
dropout = 0.2
model = RNN(len(vocab), embedding_dim, hidden_dim, num_class, n_layers, dropout, bidirectional=True, mode=mode)
两层双向RNN可以得到75%的准确率。
Training Epoch 0: 94it [01:16, 1.23it/s]
Loss: 220.78
Training Epoch 1: 94it [01:16, 1.24it/s]
Loss: 151.85
Training Epoch 2: 94it [01:14, 1.26it/s]
Loss: 125.62
Training Epoch 3: 94it [01:15, 1.25it/s]
Loss: 110.55
Training Epoch 4: 94it [01:14, 1.27it/s]
Loss: 100.75
Training Epoch 5: 94it [01:13, 1.28it/s]
Loss: 94.12
Training Epoch 6: 94it [01:12, 1.29it/s]
Loss: 88.64
Training Epoch 7: 94it [01:12, 1.29it/s]
Loss: 84.51
Training Epoch 8: 94it [01:13, 1.28it/s]
Loss: 80.83
Training Epoch 9: 94it [01:13, 1.27it/s]
Loss: 78.12
Testing: 29it [00:06, 4.79it/s]
Acc: 0.75
Cost:749.8793613910675
完整代码
https://github.com/nlp-greyfoss/metagrad
References
Bidirectional recurrent neural networkshttps://www.researchgate.net/publication/3316656_Bidirectional_recurrent_neural_networks
Pytorch [Basics] — Intro to
RNNhttps://towardsdatascience.com/pytorch-basics-how-to-train-your-neural-net-intro-to-rnn-cb6ebc594677
关注下方《学姐带你玩AI》🚀🚀🚀
220+篇AI必读论文免费领取
码字不易,欢迎大家点赞评论收藏!