一、前言
本示例展示了如何评估星载合成孔径雷达 (SAR) 的性能,并将理论极限与 SAR 系统的可实现要求进行比较。SAR利用雷达天线在目标区域上的运动来提供更精细的方位角分辨率。给定雷达的主要参数(例如工作频率、天线尺寸和带宽)及其安装的平台(例如高度、速度、安装位置),确定性能参数,例如占地面积、方位角和距离分辨率、SAR 图像的信噪比 (SNR) 和噪声等效反射率 (NER)。
二、SAR系统参数和惯例
考虑在 5.5 GHz 的 C 波段工作、脉冲带宽为 500 MHz 的低地球轨道 (LEO) 卫星上的雷达。该卫星的高度为565公里,以7.0公里/秒的速度移动。雷达天线尺寸为 5.2 m(沿方位角)x 高度为 1.1 m。假设回波处理 0.8 秒,斜角为 90 度。
2.1 实际天线波束宽度和增益
计算实际天线波束宽度。计算天线增益。
2.2 天线方向
俯角通常用于定义天线指向方向。
2.3地球曲率效应
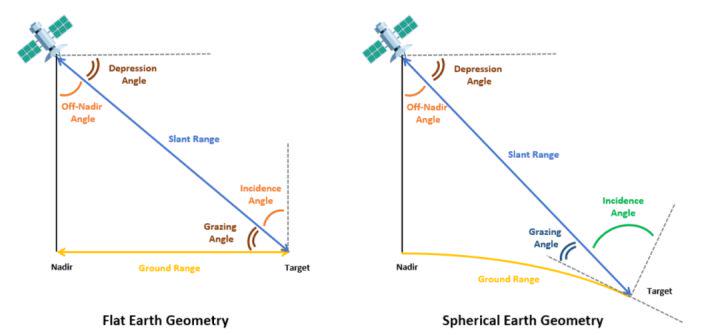
许多雷达系统的典型假设是地球是平坦的,因此俯角与掠角相同,如图所示。
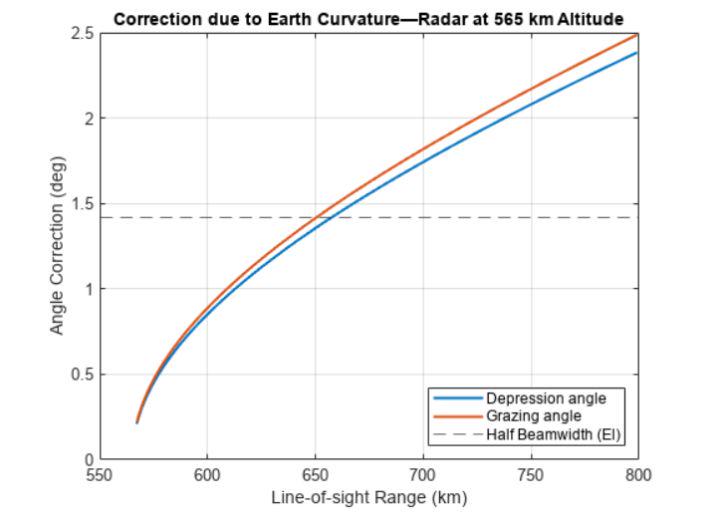
分别根据视线范围计算凹陷角和掠角。使用球形地球模型而不是平坦地球模型,观察到在660 km以上的范围内,凹陷角校正大于半波束宽度,因此在这种情况下考虑地球曲率至关重要。
2.4 非视距传播
雷达能量被大气折射并向地球弯曲,使雷达能够看到地平线之外。使用该函数使用平均曲率半径方法对对流层折射的影响进行建模。由于有效地球半径等于实际地球半径,因此可以得出结论,在这种情况下,对流层折射可以忽略不计。在这种情况下,电离层折射将被忽略。
对于此示例的其余部分,请选择 68.96 度的俯角,这对应于 67 度的掠角和 609.4 km 的倾斜范围。
三、真实和合成孔径天线的封装和分辨率
3.1 雷达足迹
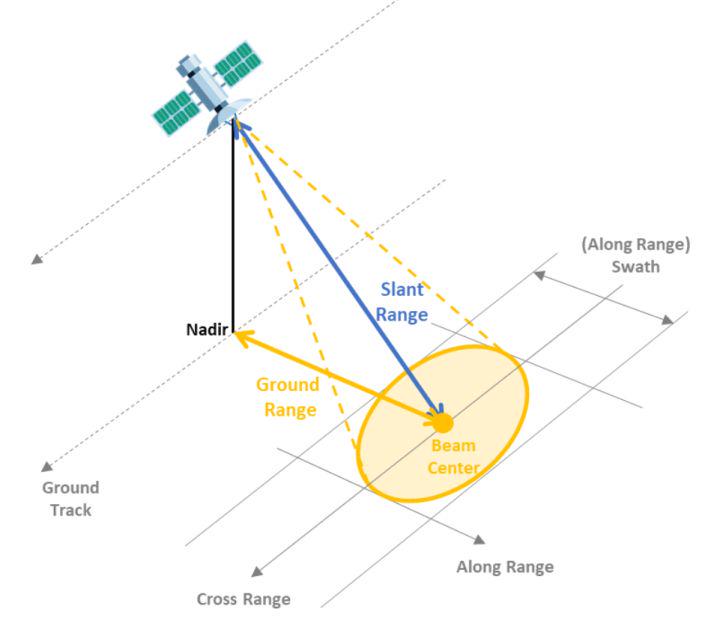
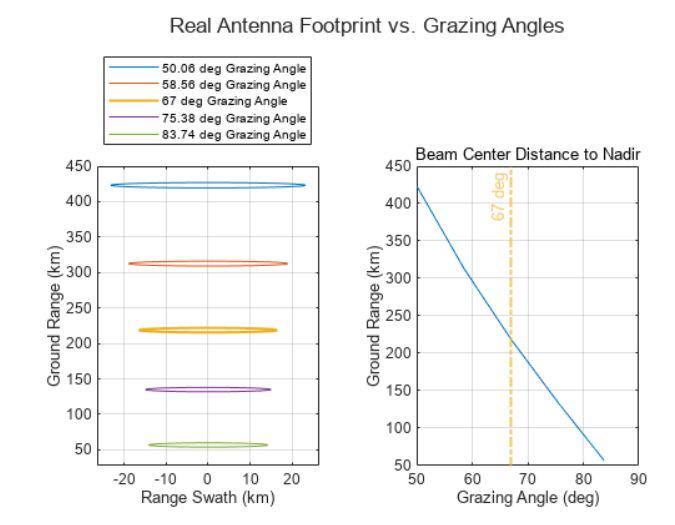
接下来,使用该函数计算天线占用空间。足迹由沿范围条带(或沿范围方向覆盖的距离)和跨范围条带(或跨范围方向覆盖的距离)确定。
计算从地面轨道(或卫星的最低点)到地面雷达波束中心的距离。请注意,虽然地球曲率对足迹大小的影响很小,但对于给定的 9.5 km 倾斜范围,它会沿范围方向将光束中心位置移动 609.4 km。
3.2 对频率和角度变化的封装敏感性
分析天线足迹对频率变化的敏感性。提高雷达的工作频率可以减少天线的占用空间。
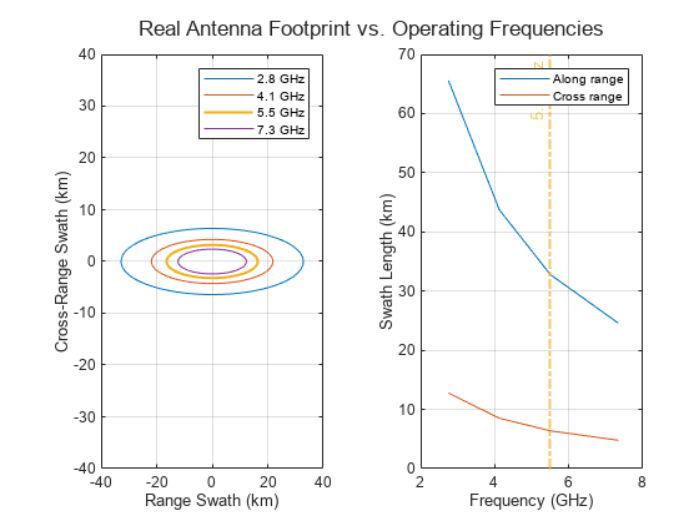
接下来,将工作频率固定回5.5 GHz,并分析天线足迹对掠角变化的敏感性。绘制从雷达足迹中心到卫星地面轨迹(地面范围)的距离作为视角的函数。正如预期的那样,当掠射角增加时,光束足迹和光束中心距离到最低点会减小。
3.3 真实天线分辨率
地面距离分辨率是在最终图像中无法分离两个点目标的距离。使用该函数计算实际天线的倾斜范围分辨率,该分辨率由信号带宽决定。
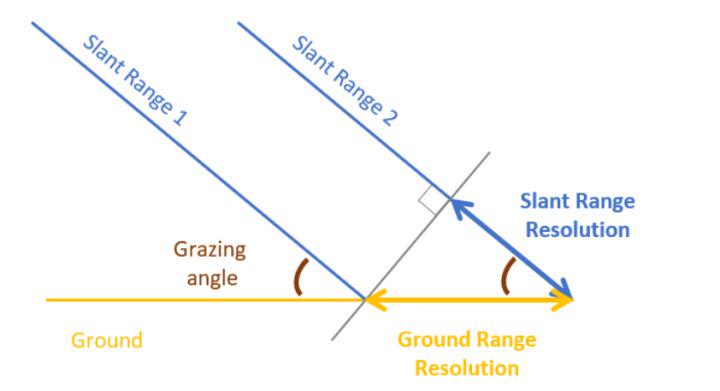
将倾斜范围分辨率投影到给定掠射角度的地平面。地面距离分辨率总是比倾斜距离分辨率差。两者之间的差异随着掠角的增加而增加。请注意,跨量程分辨率与跨量程封装相同,因为不执行信号处理来提高分辨率。这种跨范围分辨率显然是不够的。
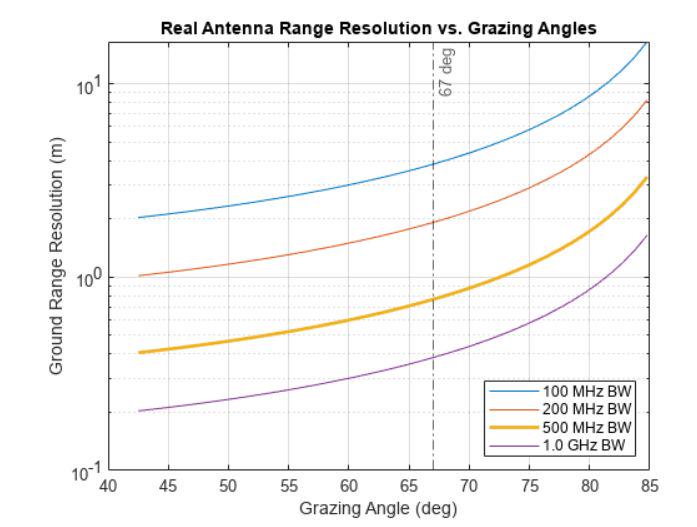
接下来,分析几个信号带宽的接地距离分辨率对掠角变化的灵敏度。最佳距离分辨率是通过高信号带宽和低掠角实现的。对于给定的带宽,距离分辨率会随着掠角的增加而恶化。在 500 MHz 时,范围分辨率从 42 度掠角下的 45 cm 到掠角为 1 度的 73.80 m 不等。
3.4 合成天线的理想分辨率与有效分辨率
上一节介绍了真实孔径雷达的范围和跨距离分辨率,下一步是使用 and 函数计算合成孔径长度及其跨距离(或方位角)分辨率。请注意,距离分辨率取决于发射信号带宽和掠射角度,对于真实孔径雷达和SAR保持不变。
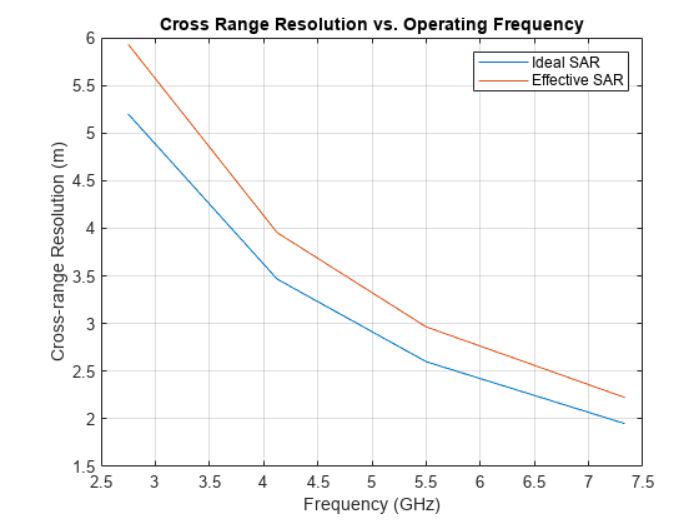
在这种情况下,使用 SAR 的最佳跨范围分辨率为 2.6 m。与真实天线的6.4公里跨范围分辨率相比,这是一个相当大的改进。然而,为了达到这种性能,脉冲需要积分超过1.1秒。此示例中分析的系统指定的积分时间仅为 800 毫秒。这会影响雷达的有效跨距离分辨率。
通过仅对800 ms的脉冲进行积分,与理想情况相比,合成孔径长度减少了800 m,跨量程分辨率减少了0.4 m至3.0 m。由于数据处理时间不到1.11秒,雷达可以在计算过程中将目标保持在波束足迹内。
接下来,分析跨量程分辨率对频率变化的灵敏度。跨量程分辨率在较高频率下得到改善。
四、SAR图像中的范围和跨范围模糊
覆盖范围(条带长度)和分辨率不能单独选择,因为它们都会对脉冲重复频率(PRF)施加限制。如果PRF设置得太低,雷达就会受到光栅瓣和多普勒(或跨量程)模糊的影响。如果PRF设置得太高,则范围测量值不明确。掠角也会影响PRF的选择,因为它会影响天线的足迹,如上一节所示。
4.1 PRF 上限和下限
使用该函数在给定卫星速度和掠射角度的情况下确定各种范围覆盖范围(足迹)和跨范围分辨率的最小和最大 PRF 值。

4.2 PRF选择因素
PRF通常是可编程的,可以针对每个任务进行优化。使用该函数根据卫星速度和沿方位角的实际天线尺寸计算雷达的PRF。指定恒定滚降系数作为安全裕度,以防止主瓣返回在PRF间隔中混叠。
所选 PRF 在 PRF 范围内。SAR平台在脉冲重复间隔(PRI)内的运动为1.73 m。
4.3 光栅瓣分析
现在,使用有效孔径长度和元素间距对具有系统对象的合成阵列进行建模。
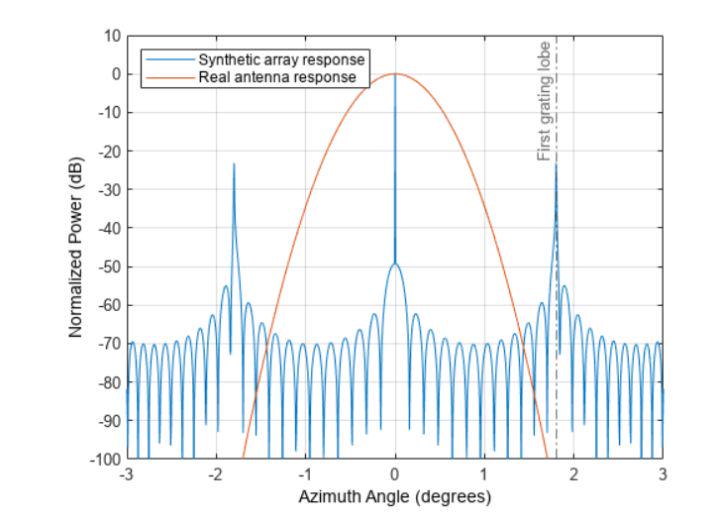
请注意,元件间距超过波长的31.8倍,因此雷达具有光栅瓣。回想一下,实际天线方位角波束宽度是 0.6 度。将天线响应建模为具有相同波束宽度的高度定向余弦模式。
绘制合成阵列和真实天线的模式响应,以验证阵列的第一个光栅瓣是否位于真实天线方向图的零点,因此雷达不会受到光栅瓣的负面影响。
五、SAR图像信噪比和噪声等效反射率
下一节将研究SAR方程中用于计算图像SNR的不同因子。首先,分析目标(或表面)雷达横截面(RCS)和雨(或体积杂波)RCS。
5.1 表面粗糙度与频率、偏振和掠角的关系
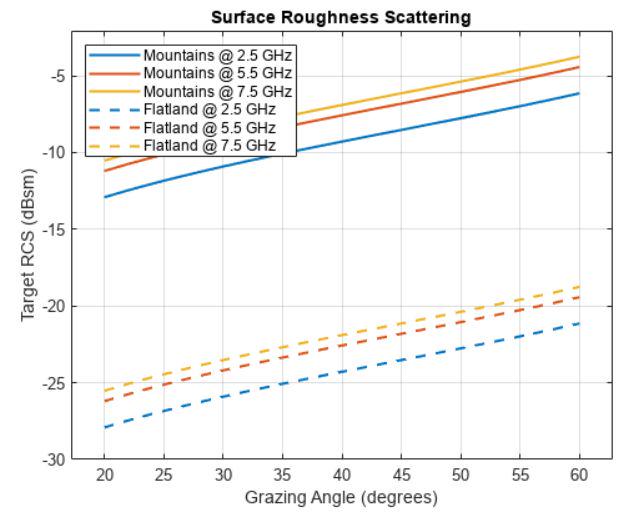
使用该函数计算给定掠射角和工作频率的反射率或归一化雷达横截面 (NRCS)。地面图像平面中的目标RCS是使用并考虑雷达分辨率计算的。通常,SAR 影像区域的亮度对应于表面的粗糙度,因此山脉由于其较高的 RCS 而显得比平地更亮。粗糙度是根据波长测量的,因此表面在一个频率下看起来粗糙,而在另一个频率下看起来很光滑。另外,请注意,RCS 随着掠角的增加而增加。
RCS 还取决于雷达的极化。使用该函数分析不同海面粗糙度(即海况)对海面反射率的偏振效应。请注意,在低掠角下,海洋RCS的变化要大得多,并且水平极化信号的RCS低于相同海况下60度以下放牧角度的垂直极化信号。该图还表明,随着掠角从10度增加到60度,极化之间的差异减小。

5.2 雨水反射率和信杂比 (SCR)
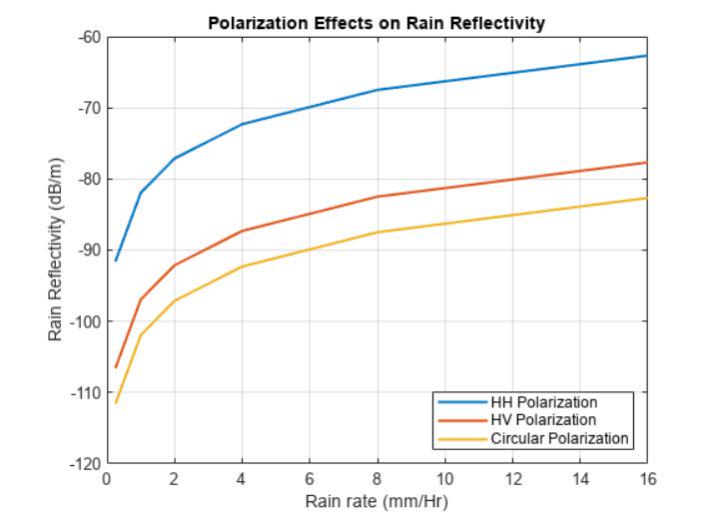
来自雨水等不良来源的竞争回波会导致SAR图像下降。落在目标场景附近的雨水使该场景的图像变得混乱。使用该函数分析不同降雨率和偏振下的雨水反射率。观察到线性偏振的雨反射率高于圆偏振,并且随着降雨速率的增加而增加。
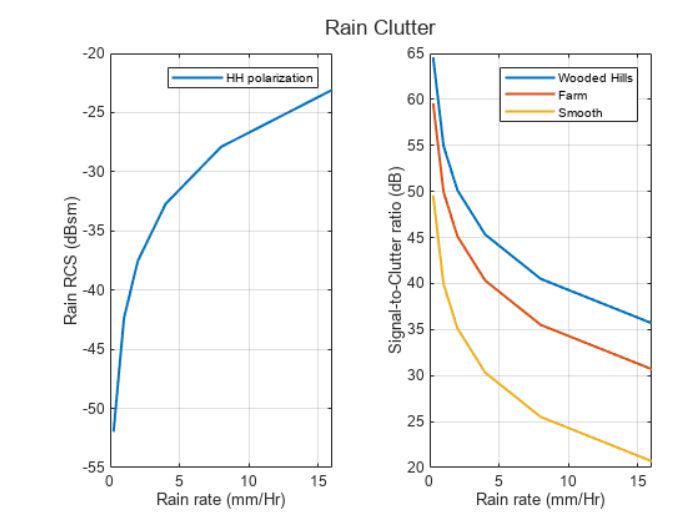
接下来,使用该函数计算雨量 RCS,该 RCS 由雷达 3-D 分辨率像元(倾斜范围、方位角和高程分辨率)定义。使用该函数计算来自目标场景的分辨率单元的信号能量与来自处理到目标场景的相同分辨率单元(或雨水 SCR)中的雨水返回的能量的比率。验证所有降雨率和所有目标(包括具有弱 RCS 的目标(如平地)的信杂比是否保持在 20 dB 以上。因此,此示例预计雨水不会成为此配置中此雷达的限制因素。
5.3 SAR方程
使用雷达方程的 SNR 形式估计雷达接收器可用的信噪比 (SNR)。首先,对雷达系统及其环境的不同增益和损耗来源进行建模和估计。
5.4 处理增益
使用该函数计算匹配滤波器后噪声带宽降低引起的距离处理增益。
使用该函数计算由于脉冲相干积分而产生的方位角处理增益。
5.5 损耗和噪声因数
使用该函数估计级联接收机级的噪声系数。假设具有以下值的七个阶段:noisefigure
第1级LNA:噪声系数 = 1.0 dB,增益 = 15.0
第2级RF滤波器:噪声系数 = 0.5 dB,增益 = -0.5
第3级混频器:噪声系数 = 5.0 dB,增益 = -7.0
第4级中频滤波器:噪声系数 = 1.0 dB,增益 = -1.0
第5级中频前置放大器:噪声系数 = 0.6 dB,增益 = 15.0
第6级中频级:噪声系数 = 1.0 dB,增益 = 20.0
第7级鉴相器:噪声系数 = 6.0 dB,增益 = -5.0
使用该函数计算平坦陆地上的单向雷达传播系数。使用该函数计算大气气体吸收造成的损失。使用该函数根据ITU模型计算下雨造成的损失。或者,您可以使用该函数根据起重机模型进行计算。使用该函数通过SAR雷达方程计算图像SNR。假设峰值功率为 5 kW。您还可以指定其他损耗和因素,包括方位波束形状损耗、窗口损耗、传输损耗和接收线损耗。使用该函数估计光束形状损耗,并将5 dB用于所有其他固定损耗组合。对于此分析,请指定为 “” 以使用最弱的陆地目标。通常认为10 dB的最小图像SNR足以提供良好的图像质量,因此对于该目标,在35.9 dB时,系统具有充足的裕量。
5.6 噪声等效反射率(NER或NEZ0)
最后,使用该函数计算雷达的NER并分析其对频率变化的灵敏度。NER是在给定表面反射率下,在接收器噪声存在下可以看到的最小的分布式杂波。它是衡量雷达对空间分布噪声的灵敏度的指标。对于此计算中的平滑地形,NER 在 62.6.GHz 时为–5.5 dB,并且随着频率的增加而增加。

六、总结
此示例说明如何估算星载SAR系统的性能参数,例如覆盖范围、分辨率和SNR。首先,确定 PRF 上限和下限以避免重影图像。然后,分析不同偏振和掠角的目标和雨杂波RCS。然后估计雷达及其环境中的处理增益和损耗。最后,使用 SAR 方程计算图像 SNR 和 NER。
七、参考文献
Doerry, Armin Walter. “Performance Limits for Synthetic Aperture Radar.” Sandia National Laboratories, February 1, 2006.
O’Donnell, Robert. “Radar Systems Engineering .” IEEE Aerospace & Electronic Systems Society, and IEEE New Hampshire Section, 2013.
八、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
打开下面的“XXX.mlx”文件,点击运行,就可以看到上述效果。
方式一:程序下载
方式二:程序下载二