【沁恒WCH CH32V307V-R1的单线半双工模式串口通讯】
- 1. 前言
- 2. 软件配置
- 2.1 安装MounRiver Studio
- 3. UASRT项目测试
- 3.1 打开UASRT工程
- 3.2 编译项目
- 4. 下载验证
- 4.1 接线
- 4.2 演示效果
- 5. 小结

1. 前言
- 该模块包含 3 个通用同步异步收发器(USART1/2/3)和 5 个通用异步收发器(UART4/5/6/7/8)。
注:对于 CH32V20x_D6、CH32F20x_D6,串口 4 为同步异步收发器(USART4)。本例演示了UART2和USAT3单线半双工模式数据传输和接收,熟悉STM32开发用易上手配置。✨✨✨- 比赛详情官网:https://www.wch.cn/RISC-V-MCU-competition/#/?indexFromSubmit=0
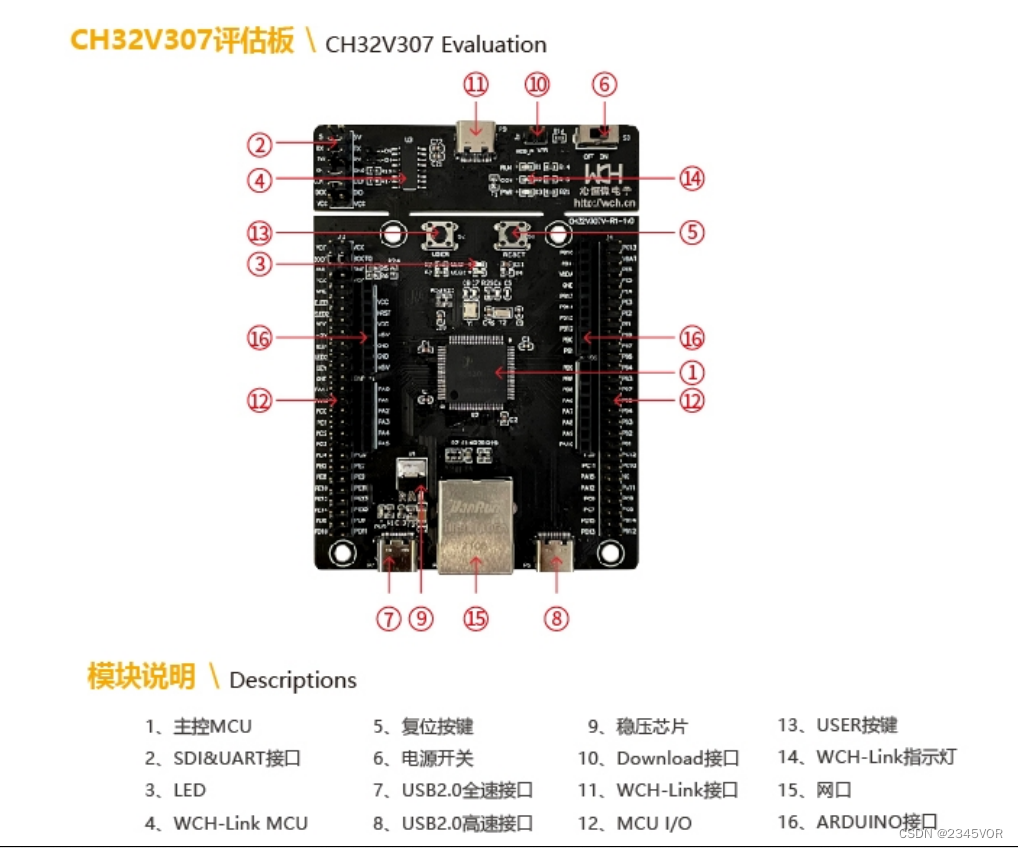
这是使用MounRiver Studio开发的项目,支持在RISC-V核心基础硬件CH32V307评估板上使用带有msh Shell的RTOS快速原型。
MCU:CH32V307VCT6,主频 144MHz,FLASH和RAM可配置
l 全双工或半双工的同步或异步通信
l NRZ 数据格式
l 分数波特率发生器,最高 9Mbps
l 可编程数据长度
l 可配置的停止位
l 支持 LIN,IrDA 编码器,智能卡
l 支持 DMA
l 多种中断源
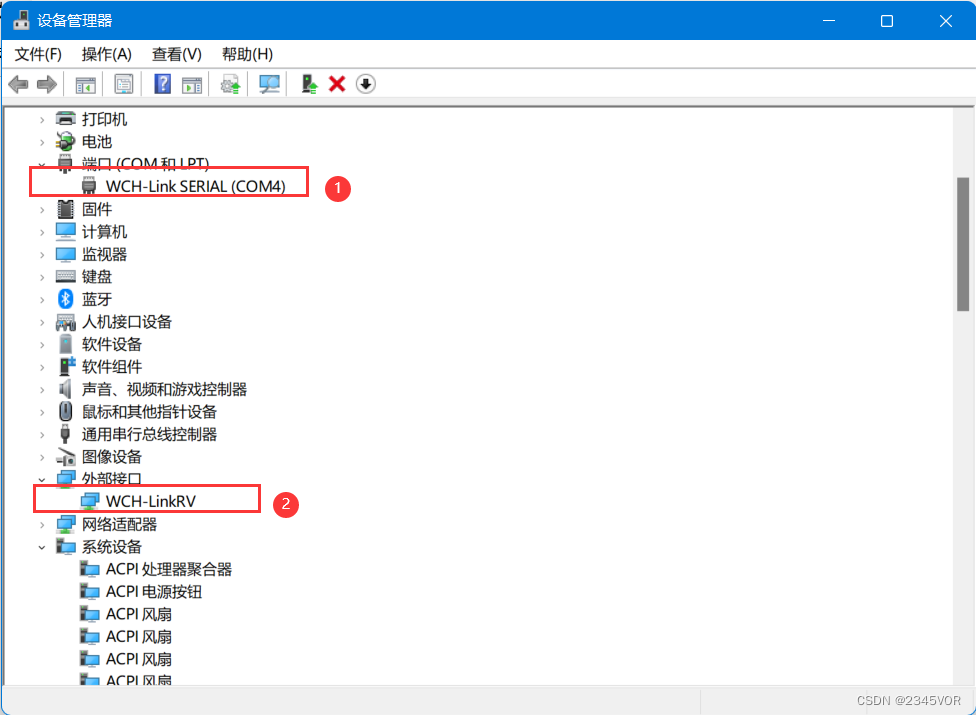
首先,应安装 CH32V307 评估板的驱动程序,打开设备管理器查看USB 端口和外部接口已准备就绪。
2. 软件配置
2.1 安装MounRiver Studio
环境搭建教程:https://blog.csdn.net/VOR234/article/details/128932474

3. UASRT项目测试
3.1 打开UASRT工程
评估板说明及参考例程:https://www.wch.cn/downloads/CH32V307EVT_ZIP.html
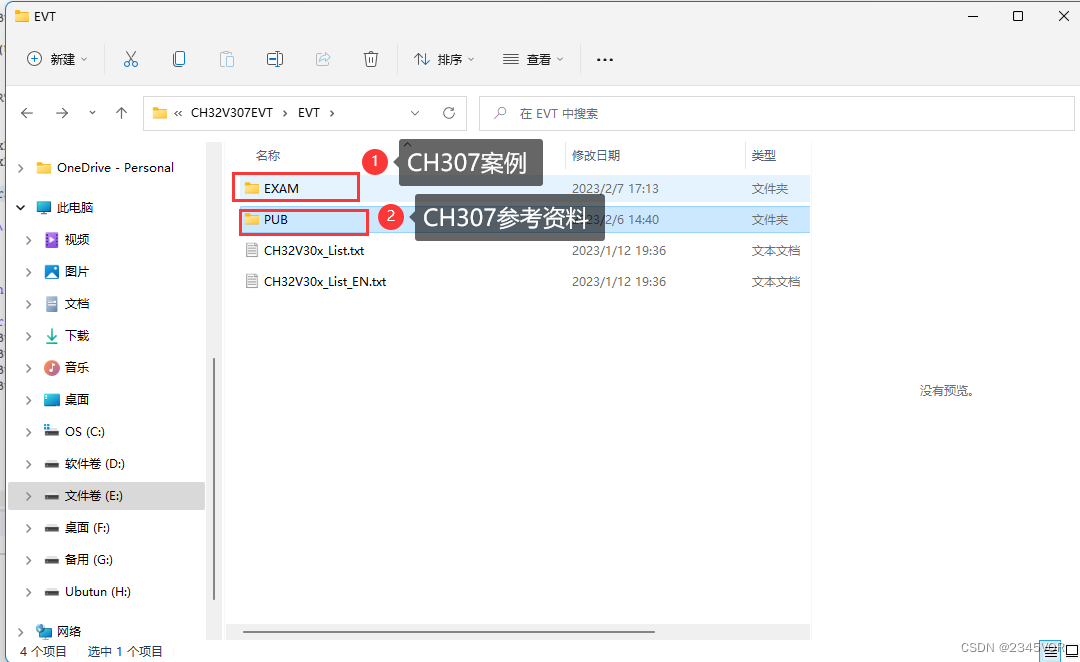
进入EXAM目录,就有对应的外设教程
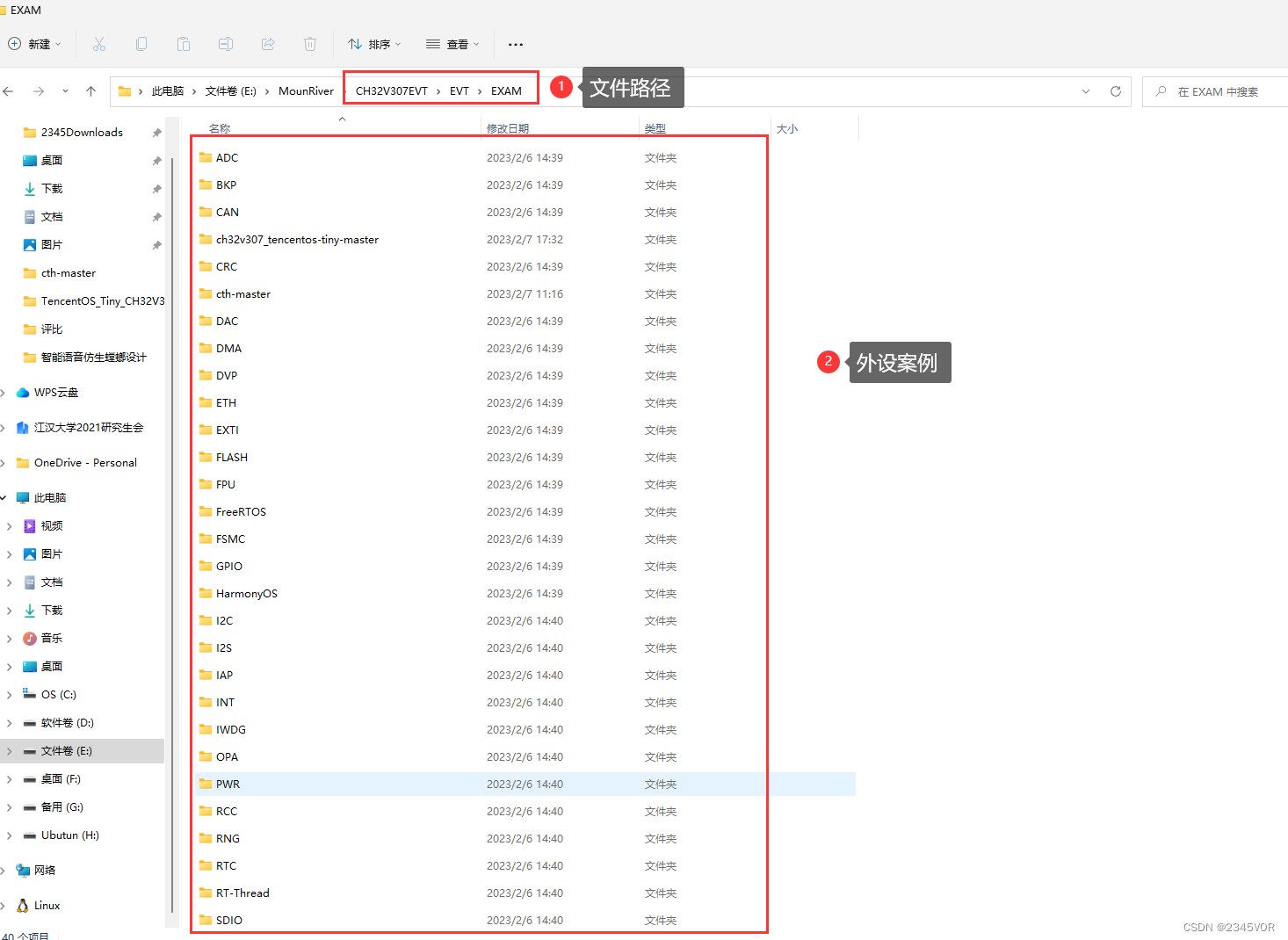
进入USART_HalfDuplex文件下,双击USART_HalfDuplex.wvproj,
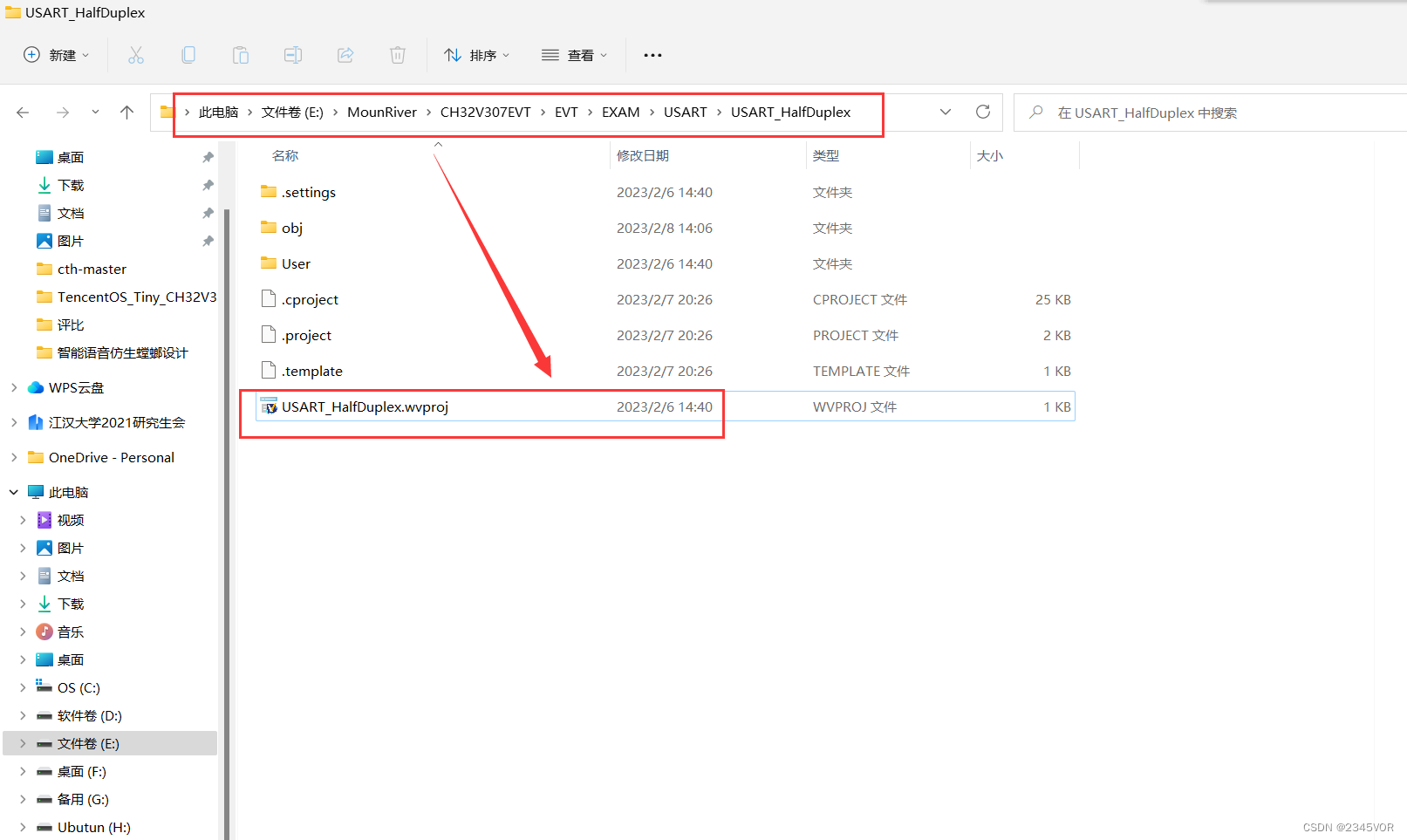
打开项目工程如下,main.c在user文件夹下
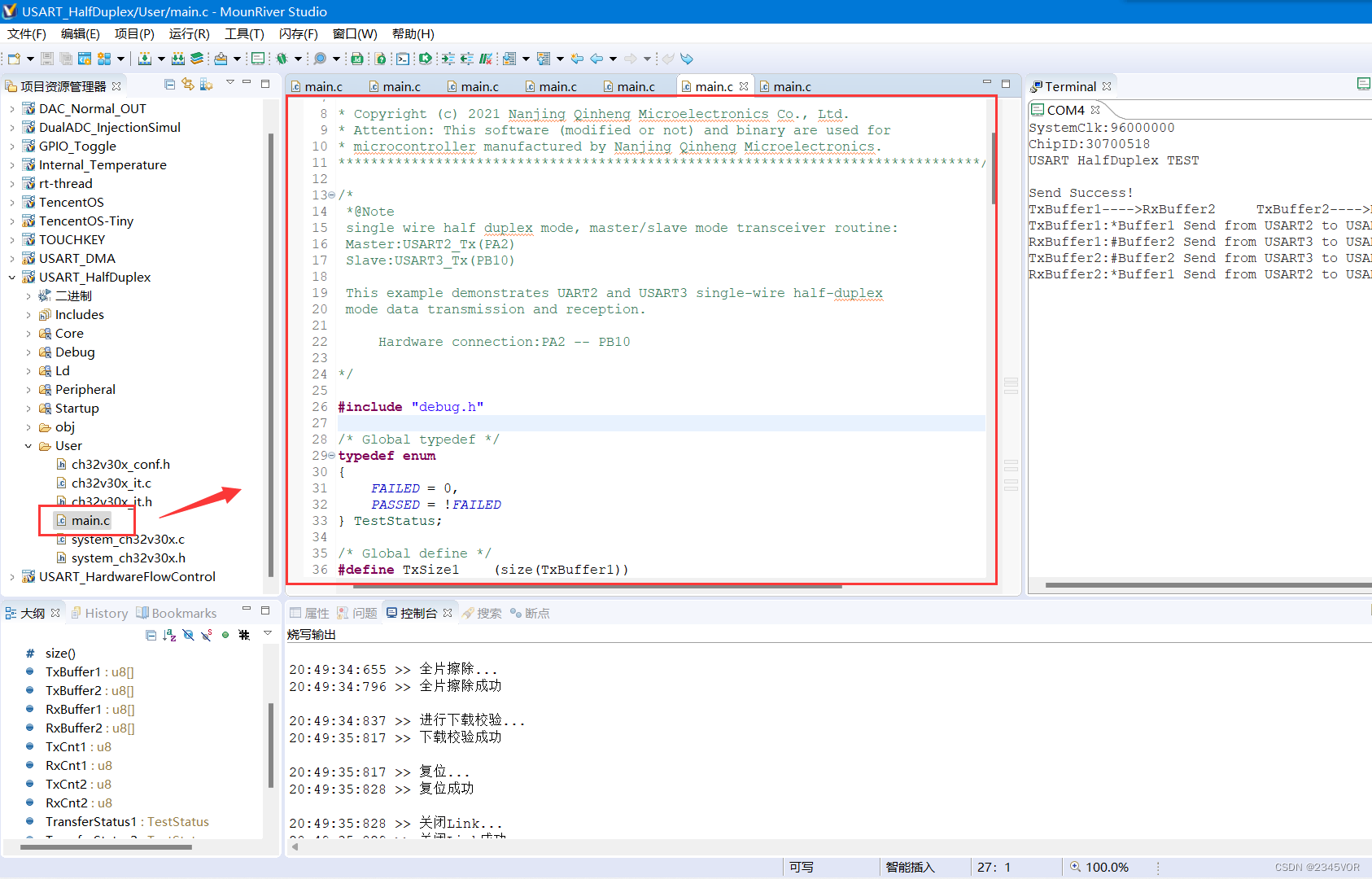
main.c,杜邦线连接PA2 – PB10
/********************************** (C) COPYRIGHT *******************************
* File Name : main.c
* Author : WCH
* Version : V1.0.0
* Date : 2021/06/06
* Description : Main program body.
*********************************************************************************
* Copyright (c) 2021 Nanjing Qinheng Microelectronics Co., Ltd.
* Attention: This software (modified or not) and binary are used for
* microcontroller manufactured by Nanjing Qinheng Microelectronics.
*******************************************************************************/
/*
*@Note
single wire half duplex mode, master/slave mode transceiver routine:
Master:USART2_Tx(PA2)
Slave:USART3_Tx(PB10)
This example demonstrates UART2 and USART3 single-wire half-duplex
mode data transmission and reception.
Hardware connection:PA2 -- PB10
*/
#include "debug.h"
/* Global typedef */
typedef enum
{
FAILED = 0,
PASSED = !FAILED
} TestStatus;
/* Global define */
#define TxSize1 (size(TxBuffer1))
#define TxSize2 (size(TxBuffer2))
#define size(a) (sizeof(a) / sizeof(*(a)))
/* Global Variable */
u8 TxBuffer1[] = "*Buffer1 Send from USART2 to USART3 using HalfDuplex Mode!"; /* Send by UART2 */
u8 TxBuffer2[] = "#Buffer2 Send from USART3 to USART2 using HalfDuplex Mode!"; /* Send by UART3 */
u8 RxBuffer1[TxSize1] = {0}; /* USART2 Using */
u8 RxBuffer2[TxSize2] = {0}; /* USART3 Using */
u8 TxCnt1 = 0, RxCnt1 = 0;
u8 TxCnt2 = 0, RxCnt2 = 0;
TestStatus TransferStatus1 = FAILED;
TestStatus TransferStatus2 = FAILED;
/*********************************************************************
* @fn Buffercmp
*
* @brief Compares two buffers
*
* @param Buf1,Buf2 - buffers to be compared
* BufferLength - buffer's length
*
* @return PASSED - Buf1 identical to Buf
* FAILED - Buf1 differs from Buf2
*/
TestStatus Buffercmp(uint8_t *Buf1, uint8_t *Buf2, uint16_t BufLength)
{
while(BufLength--)
{
if(*Buf1 != *Buf2)
{
return FAILED;
}
Buf1++;
Buf2++;
}
return PASSED;
}
/*********************************************************************
* @fn USARTx_CFG
*
* @brief Initializes the USART2 & USART3 peripheral.
*
* @return none
*/
void USARTx_CFG(void)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
USART_InitTypeDef USART_InitStructure = {0};
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2 | RCC_APB1Periph_USART3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE);
/* USART2 TX-->A.2 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; /* Only Configure TX Pin */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* USART3 TX-->B.10 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; /* Only Configure TX Pin */
GPIO_Init(GPIOB, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART2, &USART_InitStructure);
USART_Init(USART3, &USART_InitStructure);
USART_Cmd(USART2, ENABLE);
USART_Cmd(USART3, ENABLE);
USART_HalfDuplexCmd(USART2, ENABLE);
USART_HalfDuplexCmd(USART3, ENABLE);
}
/*********************************************************************
* @fn DMA_INIT
*
* @brief Configures the DMA for USART2 & USART3.
*
* @return none
*/
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
SystemCoreClockUpdate();
Delay_Init();
USART_Printf_Init(115200);
printf("SystemClk:%d\r\n", SystemCoreClock);
printf( "ChipID:%08x\r\n", DBGMCU_GetCHIPID() );
printf("USART HalfDuplex TEST\r\n");
USARTx_CFG(); /* USART2 & USART3 INIT */
while(TxCnt2 < TxSize2) /* USART3--->USART2 */
{
while(USART_GetFlagStatus(USART3, USART_FLAG_TXE) == RESET) /* waiting for sending finish */
{
}
USART_SendData(USART3, TxBuffer2[TxCnt2++]);
while(USART_GetFlagStatus(USART2, USART_FLAG_RXNE) == RESET)
{
}
RxBuffer1[RxCnt1++] = USART_ReceiveData(USART2);
}
while(TxCnt1 < TxSize1) /* USART2--->USART3 */
{
while(USART_GetFlagStatus(USART2, USART_FLAG_TXE) == RESET) /* waiting for sending finish */
{
}
USART_SendData(USART2, TxBuffer1[TxCnt1++]);
while(USART_GetFlagStatus(USART3, USART_FLAG_RXNE) == RESET)
{
}
RxBuffer2[RxCnt2++] = USART_ReceiveData(USART3);
}
TransferStatus1 = Buffercmp(TxBuffer1, RxBuffer2, TxSize1);
TransferStatus2 = Buffercmp(TxBuffer2, RxBuffer1, TxSize2);
if(TransferStatus1 && TransferStatus2)
{
printf("\r\nSend Success!\r\n");
}
else
{
printf("\r\nSend Fail!\r\n");
}
printf("TxBuffer1---->RxBuffer2 TxBuffer2---->RxBuffer1\r\n");
printf("TxBuffer1:%s\r\n", TxBuffer1);
printf("RxBuffer1:%s\r\n", RxBuffer1);
printf("TxBuffer2:%s\r\n", TxBuffer2);
printf("RxBuffer2:%s\r\n", RxBuffer2);
while(1)
{
}
}
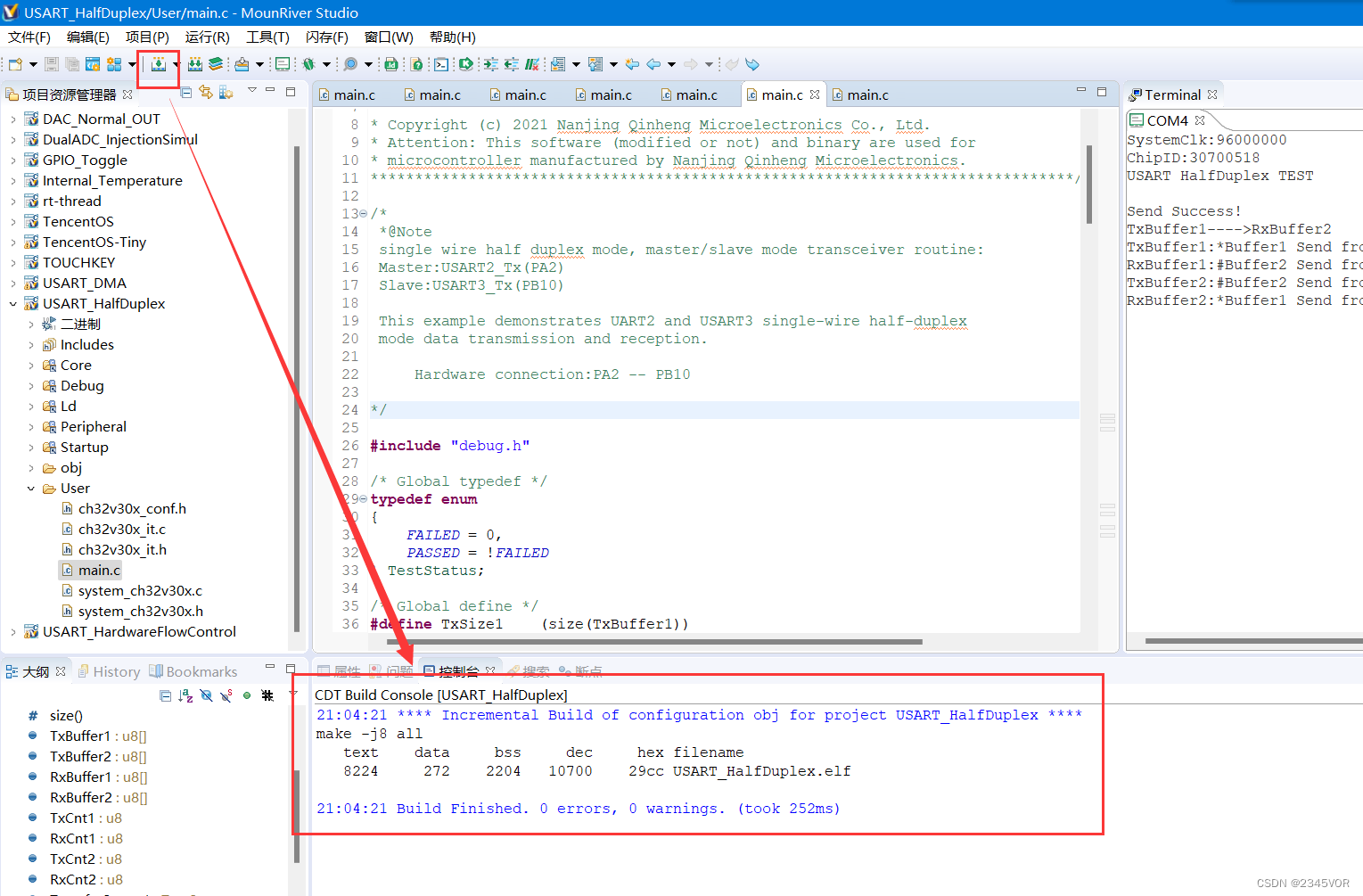
3.2 编译项目
开发板数据线连接电脑就可以开始连接调试🛹🛹🛹,首先开始编译,编译成功如下
然后下载,下载成功如下
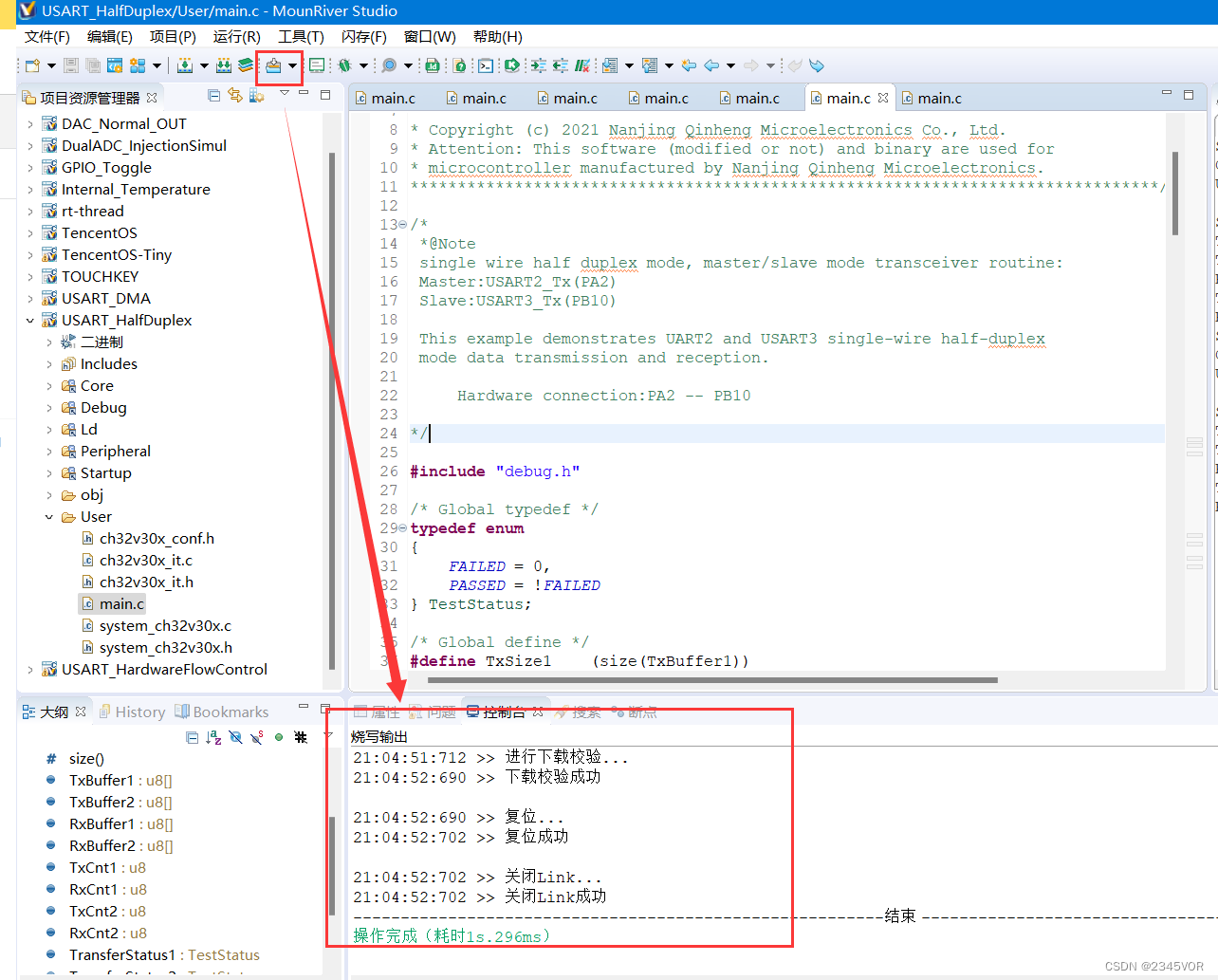
4. 下载验证
4.1 接线
根据程序设计调试,可以用杜邦线连接PA2 – PB10,即可输出通讯实验成功
4.2 演示效果
代码下载后验证,点击串口调试器,设置串口参数确认。
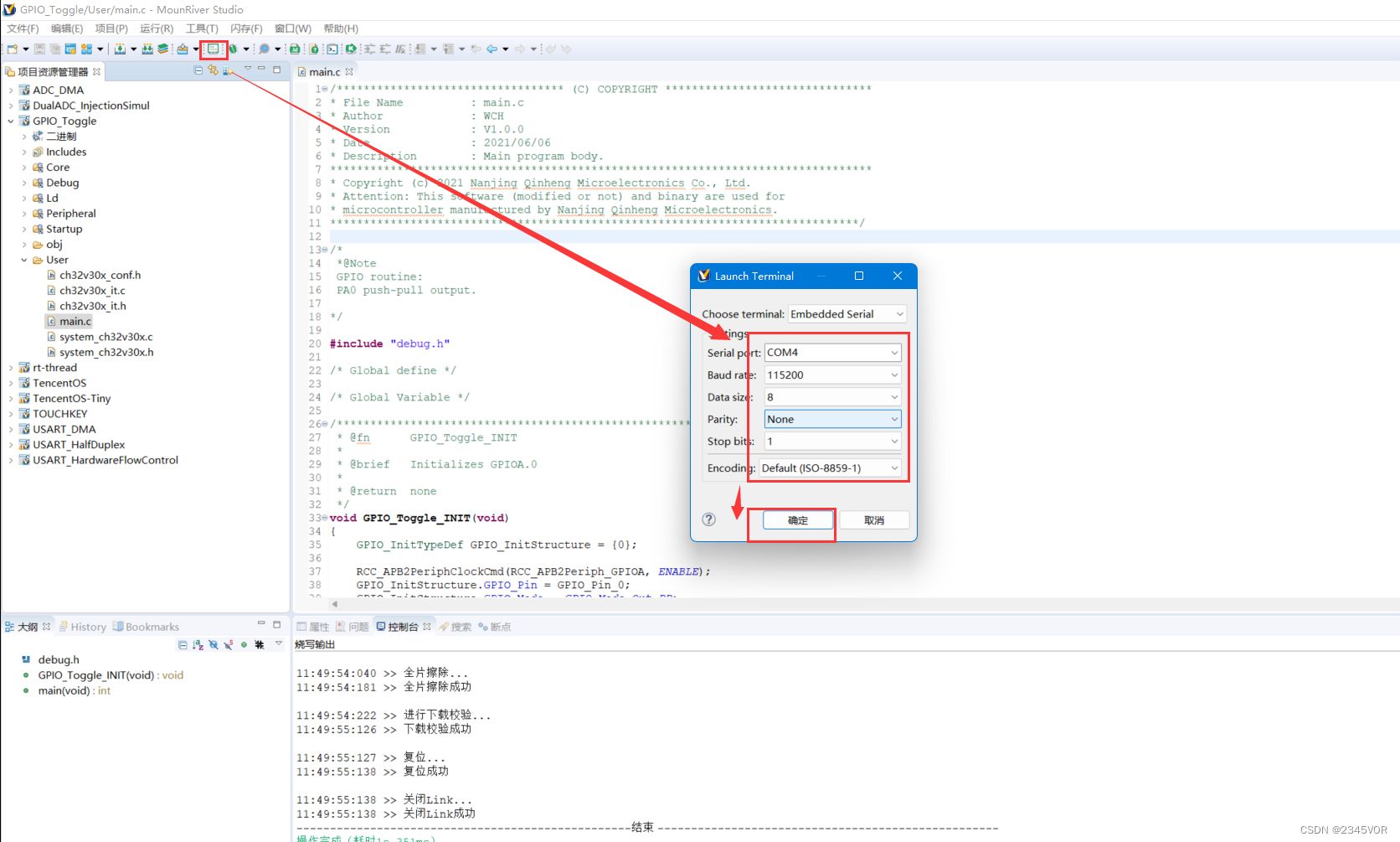
复位运行成功如下打印发送成功。
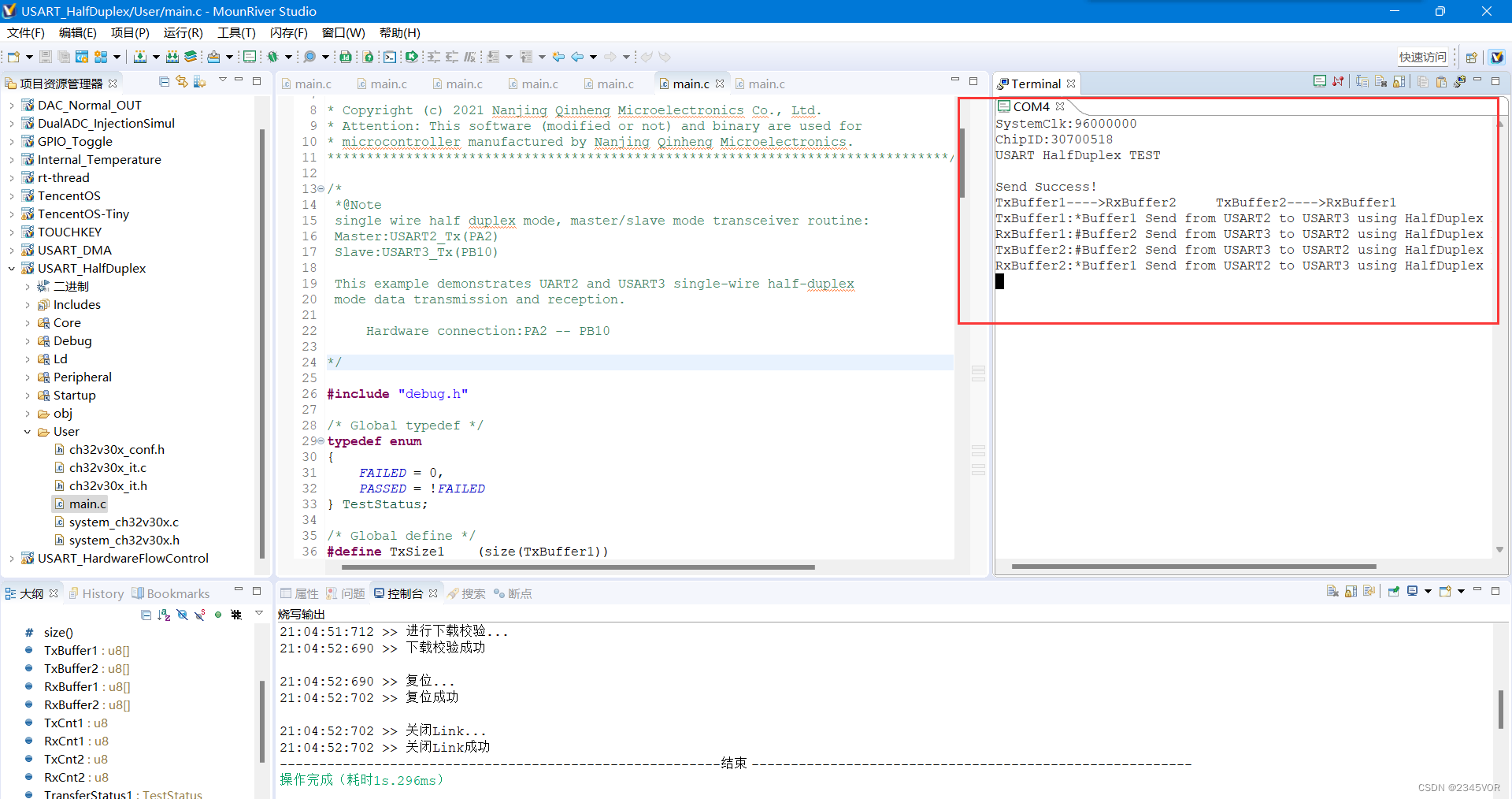
SystemClk:96000000
ChipID:30700518
USART HalfDuplex TEST
Send Success!
TxBuffer1---->RxBuffer2 TxBuffer2---->RxBuffer1
TxBuffer1:*Buffer1 Send from USART2 to USART3 using HalfDuplex Mode!
RxBuffer1:#Buffer2 Send from USART3 to USART2 using HalfDuplex Mode!
TxBuffer2:#Buffer2 Send from USART3 to USART2 using HalfDuplex Mode!
RxBuffer2:*Buffer1 Send from USART2 to USART3 using HalfDuplex Mode!
5. 小结
🥳🥳🥳通过对这篇文章我们掌握了UART2和USAT3单线半双工模式数据传输和接收,尝试与Arduino通讯做更加好玩的实验,进而丰富我们的生活。🛹🛹🛹从而实现对外部世界进行感知,充分认识这个有机与无机的环境,🥳🥳🥳科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。🤣🤣🤣
参考文献:
- CH32V307数据手册:https://www.wch.cn/downloads/CH32V20x_30xDS0_PDF.html
- CH32V307参考手册:https://www.wch.cn/downloads/CH32FV2x_V3xRM_PDF.html
- 评估板说明及参考例程:https://www.wch.cn/downloads/CH32V307EVT_ZIP.html
- CH343SER.ZIP串口地址:https://www.wch.cn/downloads/CH343SER_ZIP.html
- MRS最新V1.51版本安装包:www.mounriver.com
- 环境搭建教程:https://blog.csdn.net/VOR234/article/details/128932474
- 【沁恒WCH CH32V307V-R1开发板两路ADC读取实验】:https://blog.csdn.net/VOR234/article/details/128941074
- 【沁恒WCH CH32V307V-R1开发板读取板载温度实验】:https://blog.csdn.net/VOR234/article/details/128941832
- 【沁恒WCH CH32V307V-R1开发板输出DAC实验】:https://blog.csdn.net/VOR234/article/details/128942550