1.1 CAN是什么?
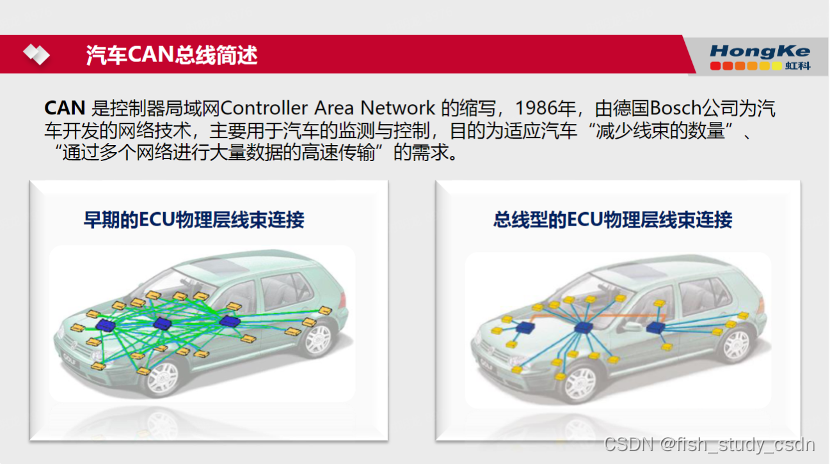
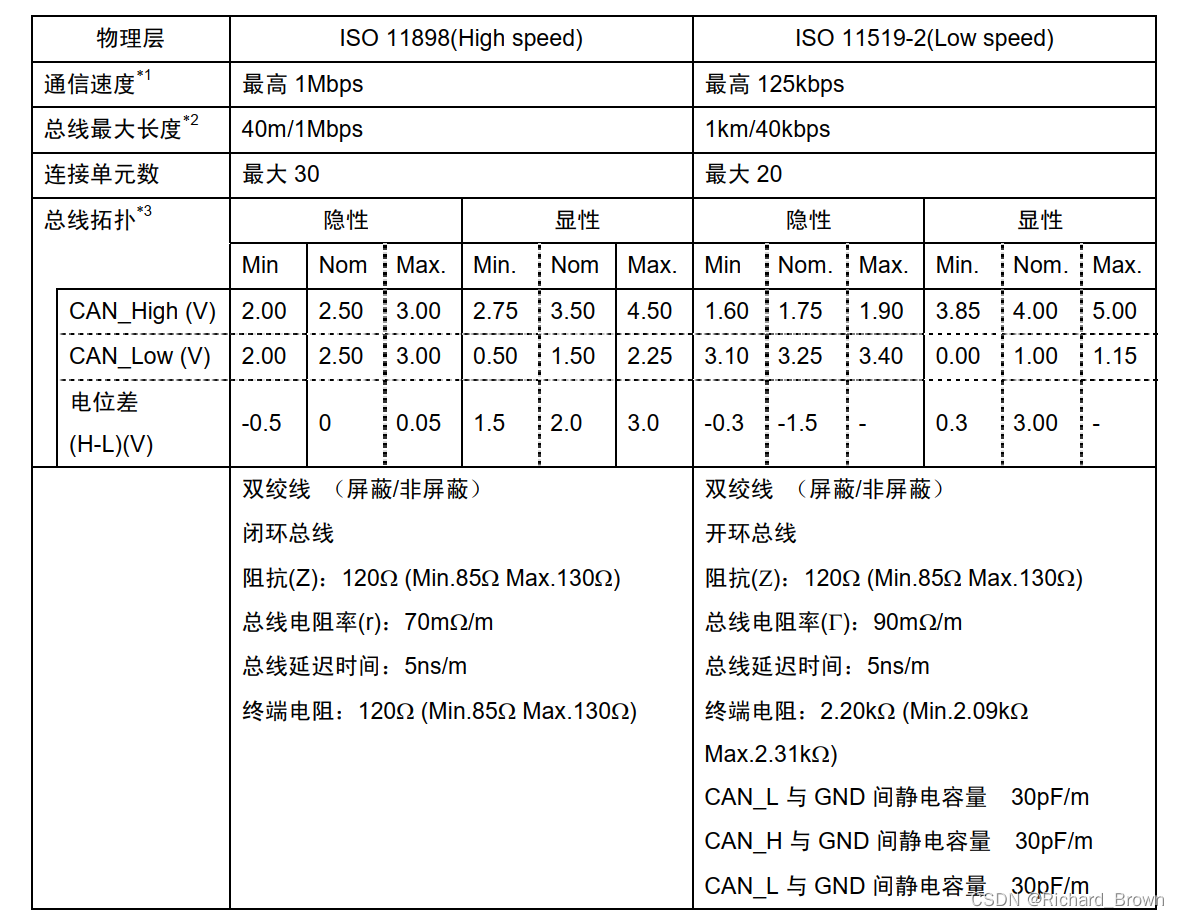
CAN 最终成为国际标准 ( ISO11898(高速应用)和 ISO11519(低速应用)),是国际上应用最广泛的现场总线之一。
1.2 CAN总线特点
- 多主方式: 可以多主方式工作,网络上任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息,而不分主从,通信方式灵活。
- 仲裁总线机制: 采用非破坏性位仲裁总线机制,当两个节点同时向网络上传送信息时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响地继续传输数据。
- 数据传送方式: 可以点对点、一点对多点(成组)及全局广播几种传送方式接收数据。
- 传输距离: 直接通信距离最远可达10km(速率5Kbps以下)。
- 通信速率: 通信速率最高可达1MB/s(此时距离最长40m)。
- 节点数: 节点数实际可达110个。
- 采用短帧结构,每一帧的有效字节数为8byte。
- 错误检测功能: 每帧信息都有CRC校验及其他检错措施,数据出错率极低。 节点在错误严重的情况下,具有自动关闭总线的功能,切断它与总线的联系,以使总线上的其他操作不受影响。
- 通信介质: 通信介质可采用双绞线,同轴电缆和光导纤维,一般采用廉价的双绞线即可,无特殊要求。
2.1 CAN总线物理结构
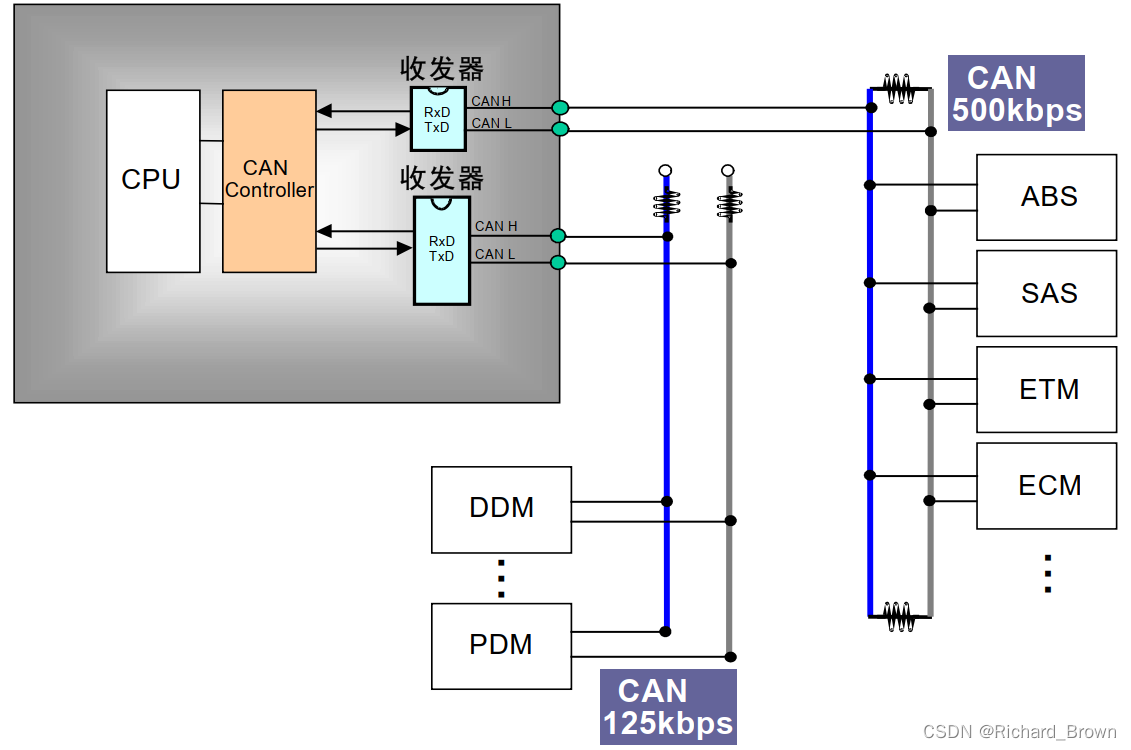
CAN 控制器根据两根线(CAN_H、CAN_L)上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。显性电平为逻辑 0,隐性电平为逻辑 1。发送方通过使总线电平发生变化,将消息发送给接收方