文章目录
- 全连接
- CNN过程
- 卷积过程
- 下采样过程
- 全连接层
- 卷积原理
- 单通道卷积
- 多通道卷积
- 改进多通道
- 总结以及课程代码
- 卷积改进
- Padding
- Stride
- 下采样过程
- 大池化层(Max Pooling)
- 简单卷积神经网络的实现
- 课程代码
本篇课程来源: 链接
部分文本来源参考: 链接
以及强烈推荐Birandaの
全连接
前篇中的完全由线性层串行而形成的网络层为全连接层,即,对于某一层的每个输出都将作为下一层的输入。即作为下一层而言,每一个输入值和每一个输出值之前都存在权重。
在全连接层中,实际上是把原先空间状态上的信息,转换为了一维的信息,使得原有的空间相对位置所蕴含的信息丢失。
下文仍以MNIST数据集为例。
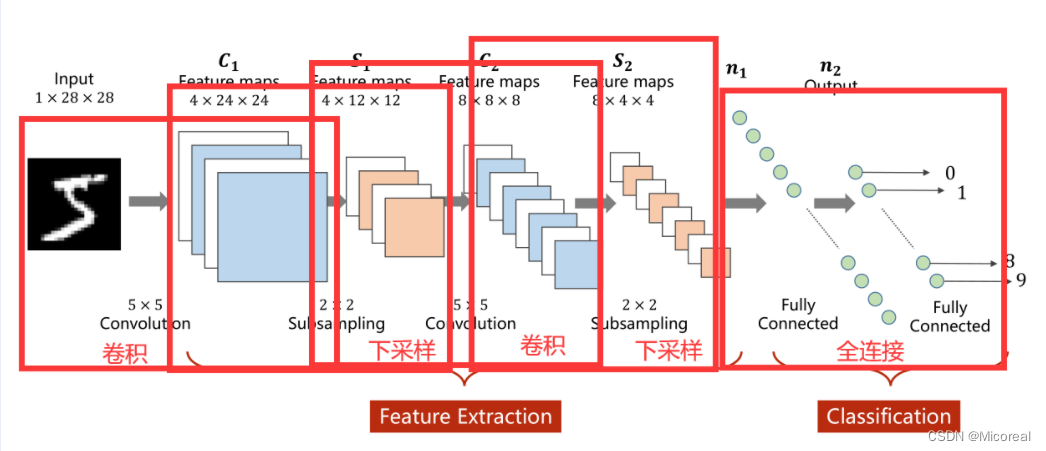
CNN过程
卷积实际上是把原始图像仍然按照空间的结构来进行保存数据。
卷积过程
1×28×28指的是 C ( c h a n n l e ) × W ( w i d t h ) × H ( H i g h t ) C(channle) \times W(width) \times H(Hight) C(channle)×W(width)×H(Hight)即通道数 × \times × 图像宽度 × \times × 图像高度,通道可以理解为层数,通过同样大小的多层图像堆叠才形成了最原始的图。
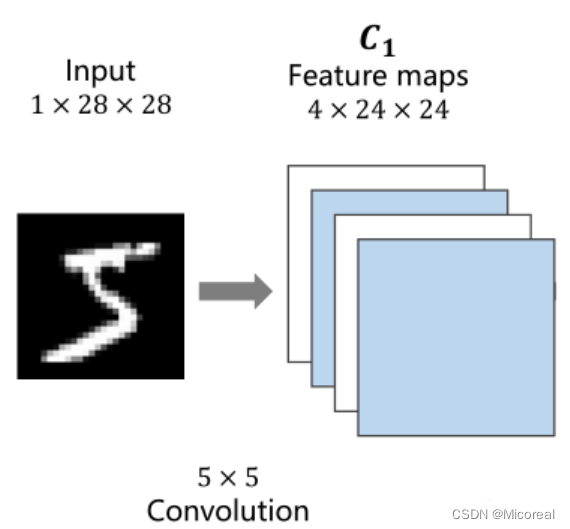
可以抽象的理解成原先的图是一个立方体性质的,卷积是将立方体的长宽高按照新的比例进行重新分割而成的。
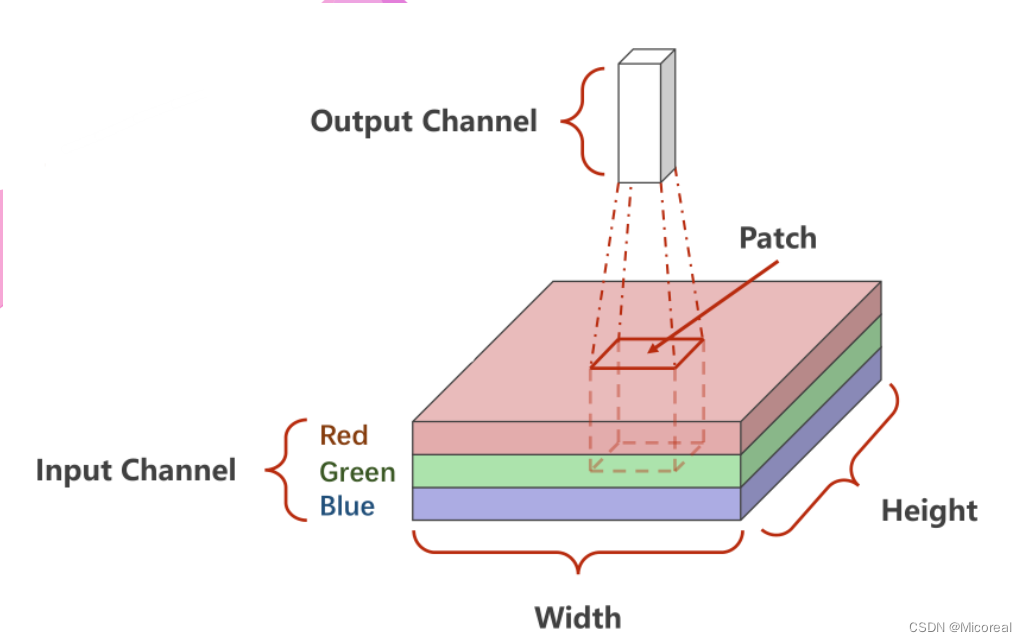
如下图所示,底层是一个 3 × W × H 3 \times W \times H 3×W×H的原始图像,卷积的处理是每次对其中一个Patch进行处理,也就是从原数图像的左上角开始依次抽取一个 3 × W ′ × H ′ 3 \times W' \times H' 3×W′×H′的图像对其进行卷积,输出一个 C ′ × W ′ ′ × H ′ ′ C' \times W'' \times H'' C′×W′′×H′′的子图。
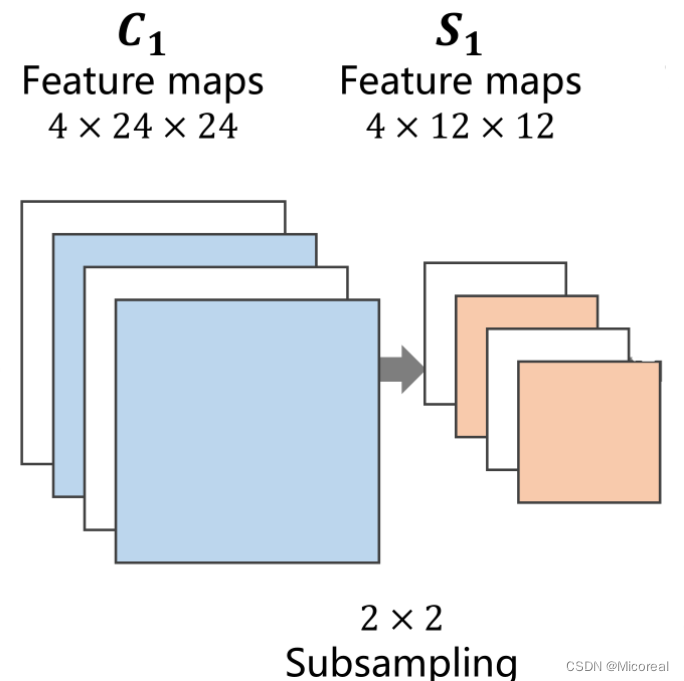
下采样过程
下采样的目的是减少特征图像的数据量,降低运算需求。在下采样过程中,通道保持不变,图像的宽度和高度发生改变
全连接层
先将原先多维的卷积结果通过全连接层转为一维的向量,再通过多层全连接层将原向量转变为可供输出的向量。
在前文的卷积过程与下采样过程,实际上是一种特征提取的手段或者过程,真正用于分类的过程是后续的全连接层。
卷积原理
单通道卷积
设定对于规格为 1 × W × H 1 \times W \times H 1×W×H的原图,利用一个规格为 1 × W ′ × H ′ 1 \times W' \times H' 1×W′×H′的卷积核进行卷积处理的数乘操作。
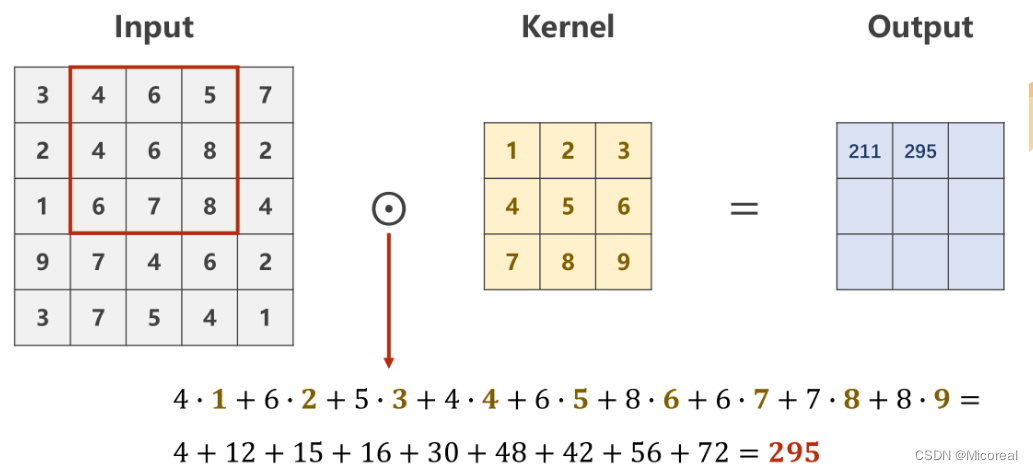
则需要从原始数据的左上角开始依次选取与核的规格相同( 1 × W ′ × H ′ 1 \times W' \times H' 1×W′×H′)的输入数据进行数乘操作,并将求得的数值作为一个Output值进行填充。
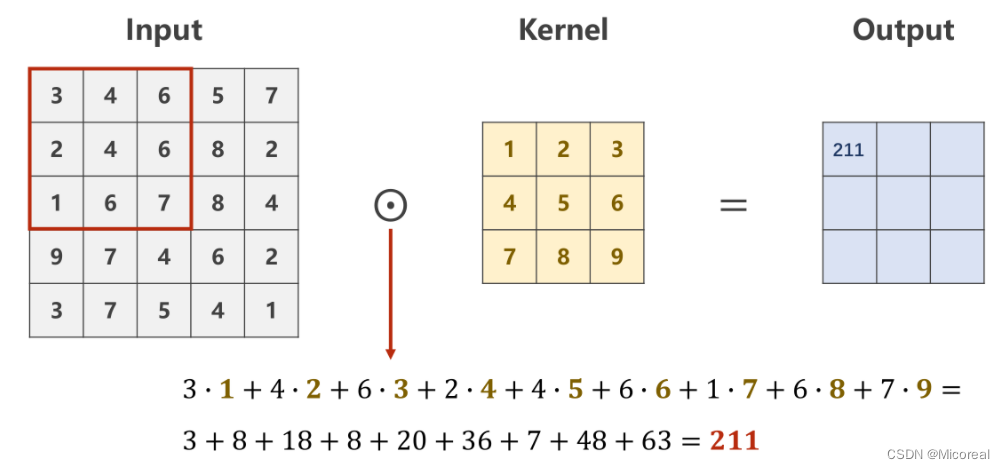
Patch在原图上进行滑动时,每次只滑动一个像素,即包含重复计算的部分
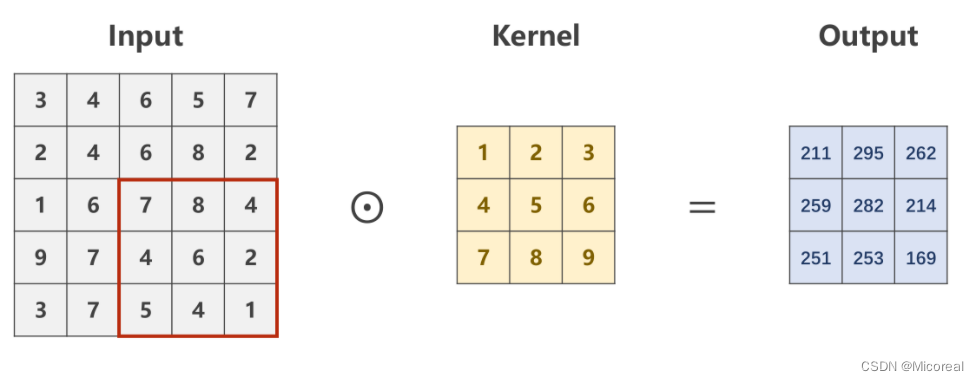
最后求得的Output的像素矩阵,即是对原图像,在设定的卷积核下的卷积结果,是一个规格为
1
×
W
′
×
H
′
1 \times W' \times H'
1×W′×H′的图像。
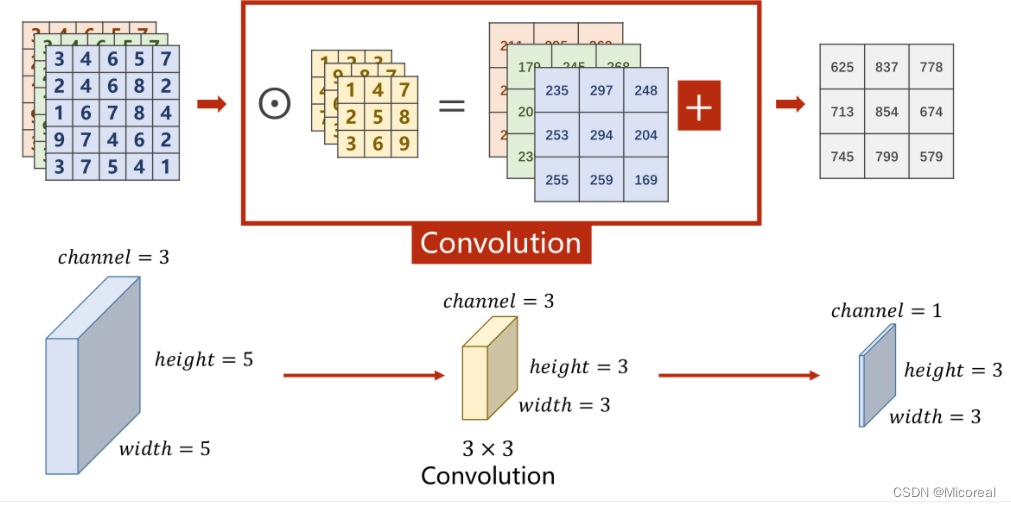
多通道卷积
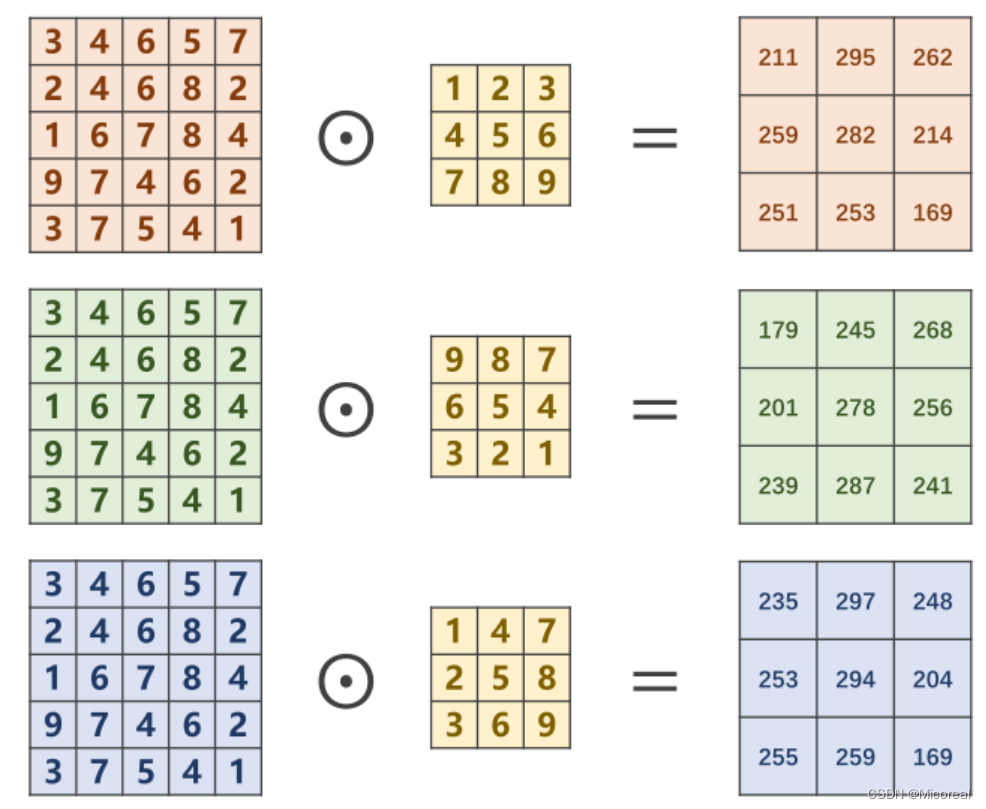
对于多通道图像( N × W × H N \times W \times H N×W×H),每一个通道是一个单通道的图像( 1 × W × H 1 \times W \times H 1×W×H)都要有一个自己的卷积核( 1 × W ′ × H ′ 1 \times W' \times H' 1×W′×H′)来进行卷积。
对于分别求出来的矩阵,需要再次进行求和才能得到最后的输出矩阵,最终的输出矩阵仍然是一个
1
×
W
′
×
H
′
1 \times W' \times H'
1×W′×H′的 图像。
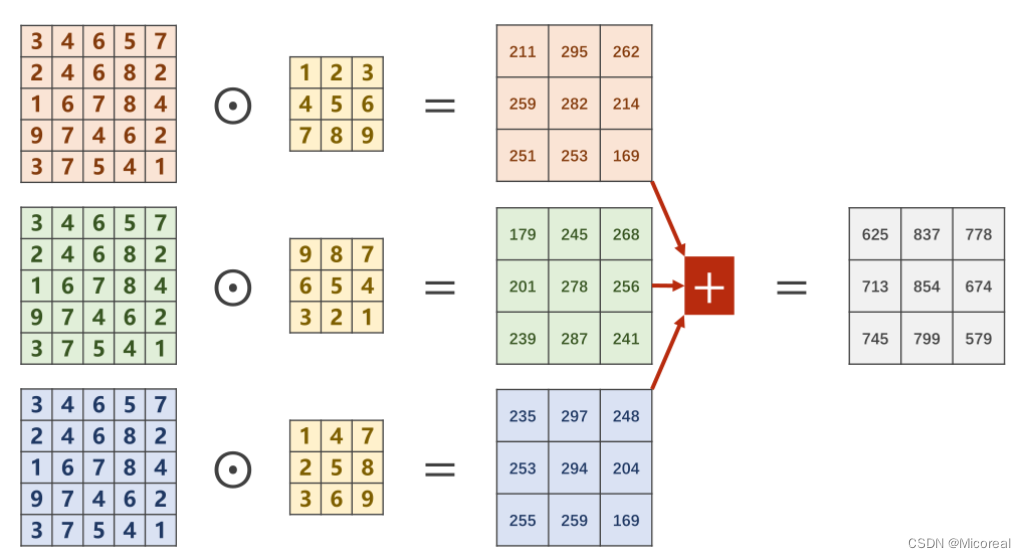
将平面的图像转为立体的角度即如下图
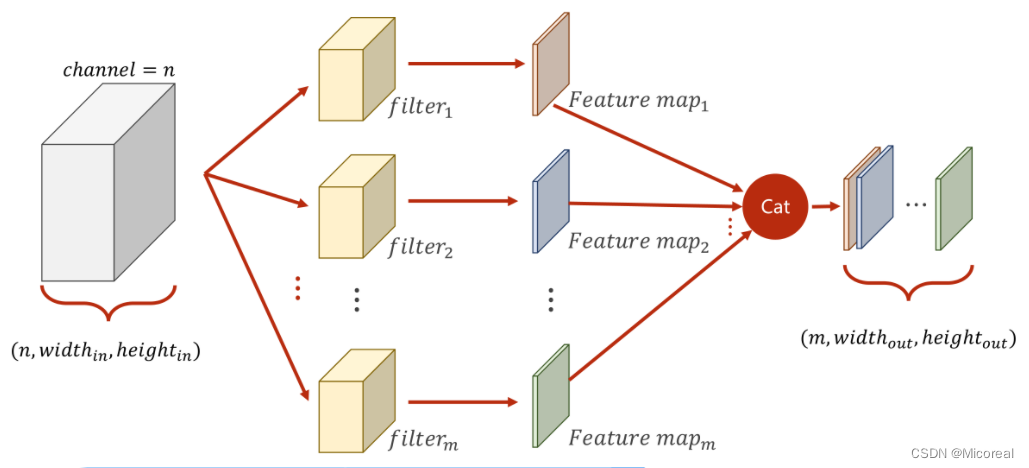
改进多通道
多通道卷积中,每次只能把 N N N个通道转变为1个通道,而无法在通道这个维度进行增加或降低。
因此,为了对通道进行更加灵活的操作,可以将原先 N × W × H N \times W \times H N×W×H的图像,利用不同的卷积核对其多次求卷积,由于每次求卷积之后的输出图像为 1 × W ′ × H ′ 1 \times W' \times H' 1×W′×H′,若一共求解了 M M M次,即可以将此 M M M次的求解结果按顺序在通道(Channel)这一维度上进行拼接,以此来形成一个规格为 M × W ′ × H ′ M \times W' \times H' M×W′×H′的图像。
总结以及课程代码
- 每个卷积核的通道数与原通道数一致
- 卷积核的数量与输出通道数一致
- 卷积核的大小与图像大小无关
上述中所提到的卷积核,是指的多通道的卷积核,而非前文中提到的二维的。
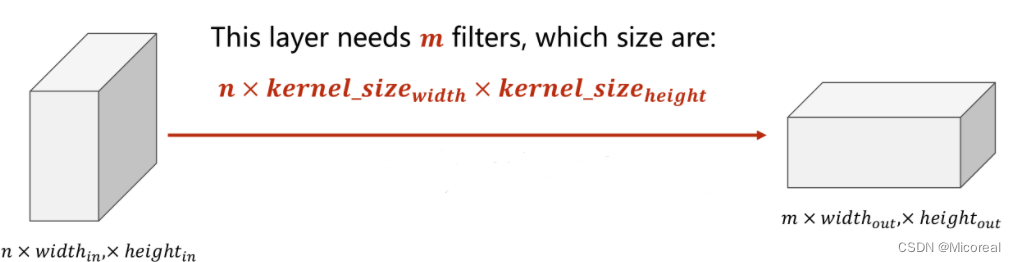
综上所述为了使下图所表征的过程成立,即若需要使得原本为
n
×
w
i
d
t
h
i
n
×
h
e
i
g
h
t
i
n
n \times width_{in} \times height_{in}
n×widthin×heightin的图像转变为一个
m
×
w
i
d
t
h
o
u
t
×
h
e
i
g
h
t
o
u
t
m \times width_{out} \times height_{out}
m×widthout×heightout的图像,可以利用
m
m
m个大小为
n
×
k
e
r
n
e
l
_
s
i
z
e
w
i
d
t
h
×
k
e
r
n
e
l
_
s
i
z
e
h
e
i
g
h
t
n \times kernel\_size_{width} \times kernel\_size_{height}
n×kernel_sizewidth×kernel_sizeheight的卷积核。
则在实际操作中,即可抽象为利用一个四维张量作为卷积核,此四维张量的大小为
m
×
n
×
k
e
r
n
e
l
_
s
i
z
e
w
i
d
t
h
×
k
e
r
n
e
l
_
s
i
z
e
h
e
i
g
h
t
m \times n \times kernel\_size_{width} \times kernel\_size_{height}
m×n×kernel_sizewidth×kernel_sizeheight
import torch
in_channels, out_channels = 5, 10
width, height = 100, 100
kernel_size = 3 #默认转为3*3,最好用奇数正方形
#在pytorch中的数据处理都是通过batch来实现的
#因此对于C*W*H的三个维度图像,在代码中实际上是一个B(batch)*C*W*H的四个维度的图像
batch_size = 1
#生成一个四维的随机数
input = torch.randn(batch_size, in_channels, width, height)
#Conv2d需要设定,输入输出的通道数以及卷积核尺寸
conv_layer = torch.nn.Conv2d(in_channels, out_channels, kernel_size=kernel_size)
output = conv_layer(input)
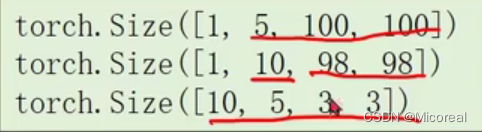
print(input.shape)
print(output.shape)
print(conv_layer.weight.shape)
输出结果:
卷积改进
Padding
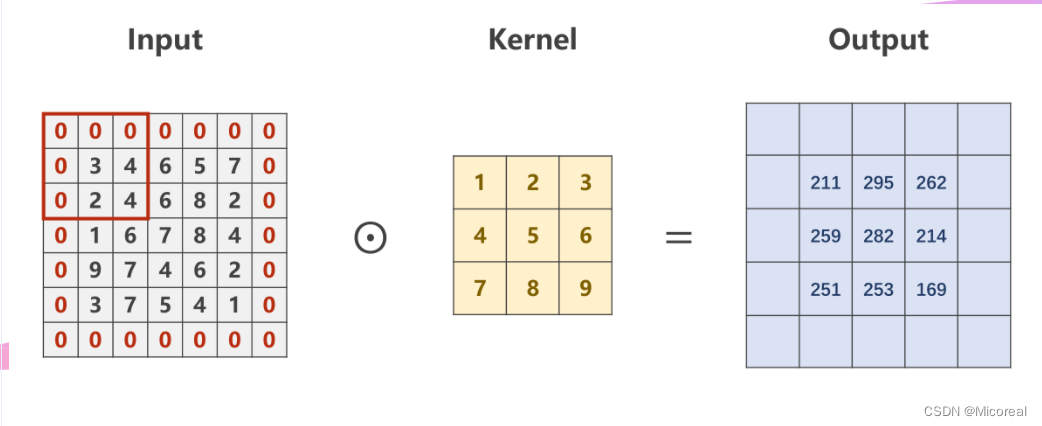
若对于一个大小为 N × N N \times N N×N的原图,经过大小为 M × M M \times M M×M的卷积核卷积后,仍然想要得到一个大小为 N × N N \times N N×N的图像,则需要对原图进行Padding,即外围填充。
例如,对于一个 5 × 5 5 \times 5 5×5的原图,若想使用一个 3 × 3 3 \times 3 3×3的卷积核进行卷积,并获得一个同样 5 × 5 5 \times 5 5×5的图像,则需要进行Padding,通常外围填充0
input = [3,4,6,5,7,
2,4,6,8,2,
1,6,7,8,4,
9,7,4,6,2,
3,7,5,4,1]
#将输入变为B*C*W*H
input = torch.Tensor(input).view(1, 1, 5, 5)
#偏置量bias置为false
conv_layer = torch.nn.Conv2d(1, 1, kernel_size=3, padding=1, bias=False)
#将卷积核变为CI*CO*W*H
kernel = torch.Tensor([1,2,3,4,5,6,7,8,9]).view(1, 1, 3, 3)
#将做出来的卷积核张量,赋值给卷积运算中的权重(参与卷积计算)
conv_layer.weight.data = kernel.data
output = conv_layer(input)
print(output)
Stride
本质上即是Batch的步长,在Batch进行移动时,每次移动Stride的距离,以此来有效降低图像的宽度与高度。
例如,对于一个 5 × 5 5 \times 5 5×5的原图,若想使用一个 3 × 3 3 \times 3 3×3的卷积核进行卷积,并获得一个 2 × 2 2 \times 2 2×2的图像,则需要进行Stride,且Stride=2
import torch
input = [3,4,6,5,7,
2,4,6,8,2,
1,6,7,8,4,
9,7,4,6,2,
3,7,5,4,1]
#将输入变为B*C*W*H
input = torch.Tensor(input).view(1, 1, 5, 5)
#偏置量bias置为false
conv_layer = torch.nn.Conv2d(1, 1, kernel_size=3, stride=2, bias=False)
#将卷积核变为CI*CO*W*H
kernel = torch.Tensor([1,2,3,4,5,6,7,8,9]).view(1, 1, 3, 3)
#将做出来的卷积核张量,赋值给卷积运算中的权重(参与卷积计算)
conv_layer.weight.data = kernel.data
output = conv_layer(input)
print(output)
下采样过程
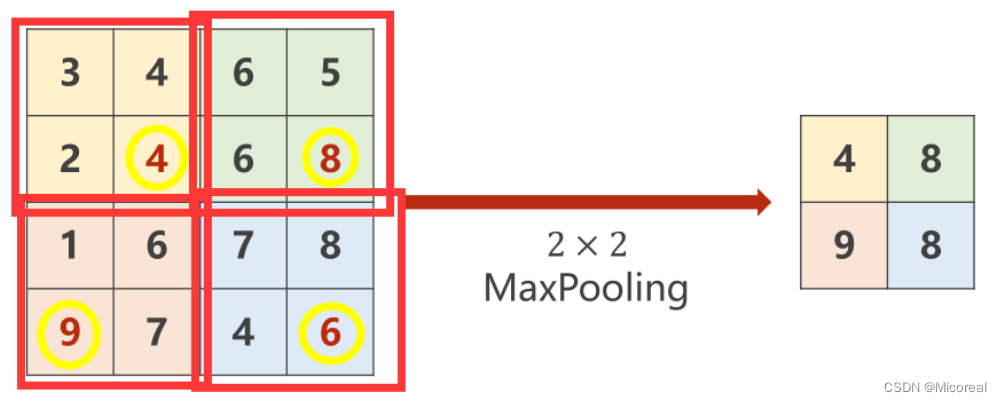
大池化层(Max Pooling)
对于一个 M × M M \times M M×M图像而言,通过最大池化层可以有效降低其宽度和高度上的数据量,例如通过一个 N × N N \times N N×N的最大池化层,即将原图分为若干个 N × N N \times N N×N大小的子图,并在其中选取最大值填充到输出图中,此时输出图的大小为 M N × M N \frac{M}{N} \times \frac{M}{N} NM×NM 。
import torch
input = [3,4,6,5,
2,4,6,8,
1,6,7,8,
9,7,4,6]
input = torch.Tensor(input).view(1, 1, 4, 4)
#kernel_size=2 则MaxPooling中的Stride也为2
maxpooling_layer = torch.nn.MaxPool2d(kernel_size=2)
output = maxpooling_layer(input)
print(output)
简单卷积神经网络的实现
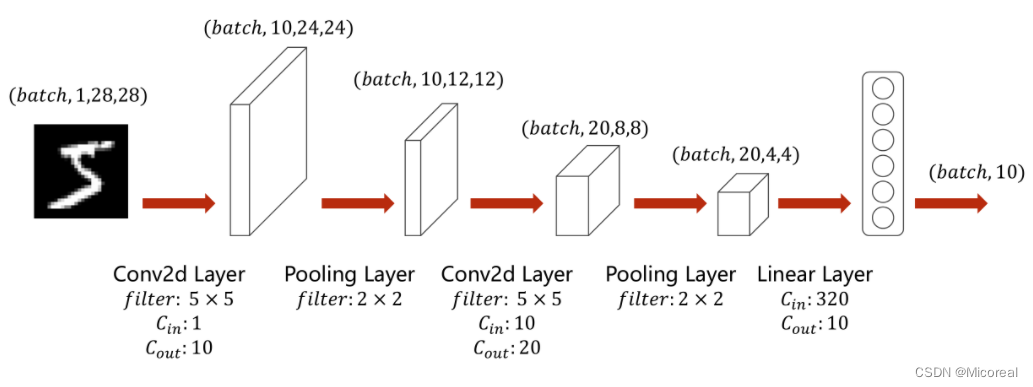
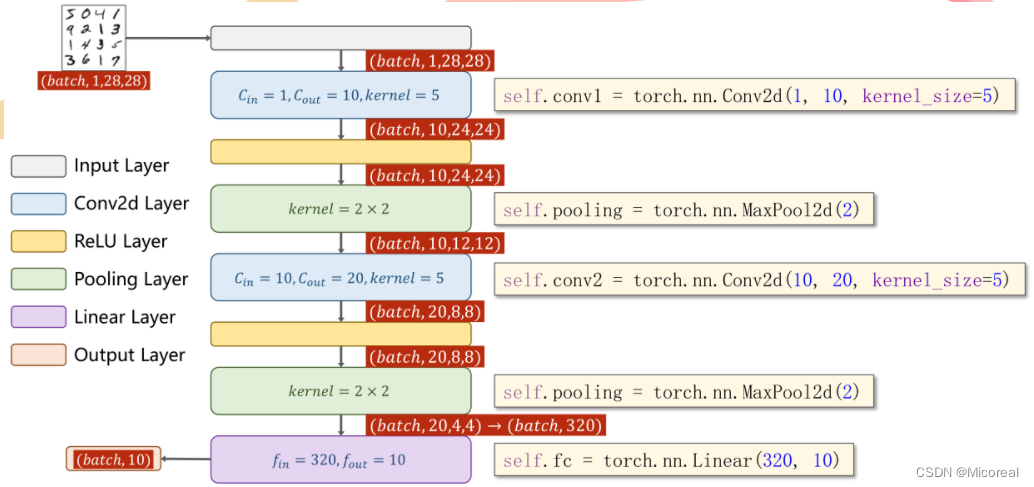
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = torch.nn.Conv2d(1, 10, kernel_size=5)
self.conv2 = torch.nn.Conv2d(10, 20, kernel_size=5)
self.pooling = torch.nn.MaxPool2d(2)
self.fc = torch.nn.Linear(320, 10)
def forward(self, x):
batch_size = x.size(0)
x = self.pooling(F.relu(self.conv1(x)))
x = self.pooling(F.relu(self.conv2(x)))
x = x.view(batch_size, -1)
x = self.fc(x)
return x
课程代码
import torch
from torchvision import transforms
from torchvision import datasets
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torch.optim as optim
# prepare dataset
batch_size = 64
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))])
train_dataset = datasets.MNIST(root='../dataset/mnist/', train=True, download=True, transform=transform)
train_loader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size)
test_dataset = datasets.MNIST(root='../dataset/mnist/', train=False, download=True, transform=transform)
test_loader = DataLoader(test_dataset, shuffle=False, batch_size=batch_size)
# design model using class
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = torch.nn.Conv2d(1, 10, kernel_size=5)
self.conv2 = torch.nn.Conv2d(10, 20, kernel_size=5)
self.pooling = torch.nn.MaxPool2d(2)
self.fc = torch.nn.Linear(320, 10)
def forward(self, x):
# flatten data from (n,1,28,28) to (n, 784)
batch_size = x.size(0)
x = F.relu(self.pooling(self.conv1(x)))
x = F.relu(self.pooling(self.conv2(x)))
x = x.view(batch_size, -1) # -1 此处自动算出的是320
x = self.fc(x)
return x
model = Net()
# construct loss and optimizer
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.5)
# training cycle forward, backward, update
def train(epoch):
running_loss = 0.0
for batch_idx, data in enumerate(train_loader, 0):
inputs, target = data
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs, target)
loss.backward()
optimizer.step()
running_loss += loss.item()
if batch_idx % 300 == 299:
print('[%d, %5d] loss: %.3f' % (epoch+1, batch_idx+1, running_loss/300))
running_loss = 0.0
def test():
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
images, labels = data
outputs = model(images)
_, predicted = torch.max(outputs.data, dim=1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('accuracy on test set: %d %% ' % (100*correct/total))
if __name__ == '__main__':
for epoch in range(10):
train(epoch)
test()