本文来自于博主发明专利的技术交底。
大型科考船船底安装大型的精密测量设备,对安装的测量精度要求比较高,通过上坞,采用传统的测量方式,先做控制网,然后进行碎步测量,得到测量设备及其室内附属设备与船舶的位置和角度关系;大型科考船一旦下坞以后,增加或者更换侧挂设备和甲板设备,其与船舶的相对位置一般是结合船舶的结构图通过拉皮尺测量实现的,无法通过传统测量方式实现,因为船舶在靠泊的时候,是动态的。这种拉皮尺的测量方式比较粗略,准确性和可靠性不高,对于相对位置不敏感的设备来说,尚可以接受。但是,碰到对于相对位置敏感的设备,比如多波束测深系统的姿态传感器,这个测量方式就不适宜了。解决的办法是利用船舶上坞的时候,增加或更换设备,并进行安装测量。
中小型的科考船如果船底安装设备,与大型科考船一样,通过上坞来解决设备安装和测量的问题。然而很多时候,中小型的科考船测量设备都是侧挂安装。对于中型船舶来说,与大型船舶一样,通过船舶的结构图和拉皮尺测量侧挂设备及其附属甲板设备与船舶的相对位置关系。对于小型船舶来说,直接拉皮尺测量设备与船舶的相对位置关系。这种测量方式适用于侧挂设备是临时的 或者安装精度要求不高的时候,也是目前海洋调查设备安装测量的主要方法。如果侧挂设备是长期的或者安装精度要求高的时候,这种方法并不适合,因为安装精度不高,造成了测量数据的质量不高,导致了自身数据的符合性较差,中误差较大,进而影响成果数据的整体质量。
因此,需要一种安装测量方法,可以在船舶不上坞或在码头靠泊的情况下,高精度地获取海洋调查设备相对于船舶的位置关系。目前在船舶不上坞或在码头靠泊的情况下,获取海洋调查设备相对于船舶的位置关系的主要方法是结合船舶的结构图以拉皮尺方式进行测量,如果想要获得更好的测量精度,船舶必须上坞,通过传统的测量方式来获取。结合船舶的结构图以拉皮尺方式进行测量,精度不高,测量结果不理想,如果想要获得更好的测量精度,船舶必须上坞,通过传统的测量方式来获取,但是成本高,有时现实条件根本不容许。
一、使用硬件
莱卡TS50是新一代超高精度全站仪,主要技术参数:测角精度:0.5秒;测距精度:2mm+2ppm。反光贴若干。

二、软件
博主自编的软件OpenCoord(wwww.xiaokcehui.com提供下载),目前更新至V1.1.2,它不仅支持地理坐标投影转换和不同椭球之间的小角度转换(布尔莎七参数法),也支持任意旋转角坐标转换(九参数法)。本技术方法用到就是任意旋转角坐标转换(下图中的九参数法)。 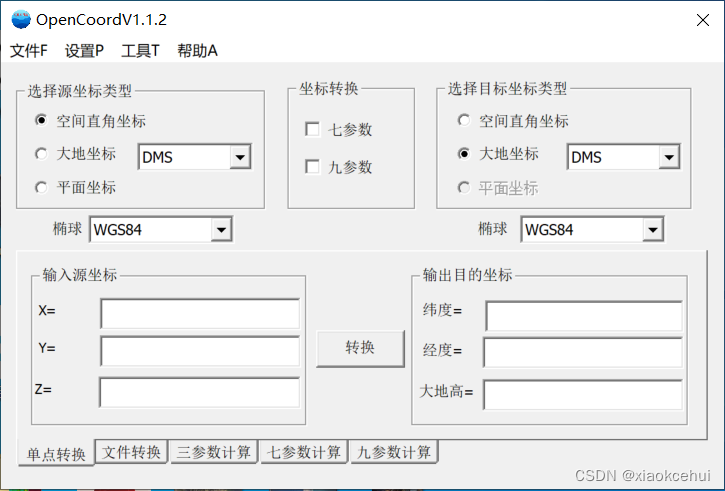 三、操作步骤
三、操作步骤
(1)实地踏勘船舶上待测量的设备,结合船舶的总布置图,设计好全站仪的站位,选择的位置需便于架设全站仪,且视野相对开阔。
(2)在相邻全站仪站位都能通视的位置(即公共点)布置反光贴,公共点数量必须大于3个,且位置较为均匀,不能过于集中某一个方向。
(3)在选定的位置架设全站仪,无需对中,只需整平,对能通视的所有反光贴进行测量,画好草图,测量的数据自动保存在全站仪的存储卡中;逐站测量,直至全部测完。
(4)导出全站仪各测站的数据,以第1站T1(可以是其它任何测站)的坐标系统为基准,将其它测站的坐标转成T1坐标系统下的坐标,具体做法是:利用OpenCoord坐标转换软件的任意旋转角转换功能,先计算相邻测站坐标系统转换的九参数,然后利用转换参数将不同测站的测点坐标都转换至T1坐标系统,实现所有测点的坐标系统的统一。
(5)在T1测站时,除了测量与相邻测站的公共点以外,还需测量与船舶的公共点,将船舶也置于T1坐标系统之下。
(6)最后根据船舶的总布置图,建立以船舶坐标系统,直接在CAD图量出各待测设备在船舶坐标系统的位置。
至此,安装测量工作全部完成。
四、实例
本技术手段可在船舶不上坞时实现船载设备的高精度安装测量,此方法不仅能测出各安装设备相对于船舶重心的相对位置关系,而且还可以进行精度评估,与拉皮尺的测量方式相比,优势明显。下面以某科考船船载设备的安装测量为例,说明本技术手段优越性。
科考船停泊在码头,多波束采用侧挂安装于左弦后甲板,姿态传感器(MRU)安装在船舶中部的地面固定架内,本次安装测量的主要任务是:测量姿态传感器和多波束安装杆在船舶坐标系统中的相对位置关系。
(1)建立测站测量全部测点
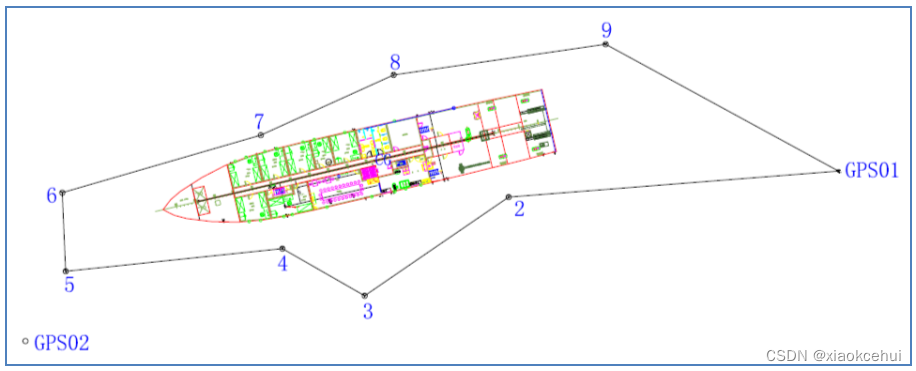
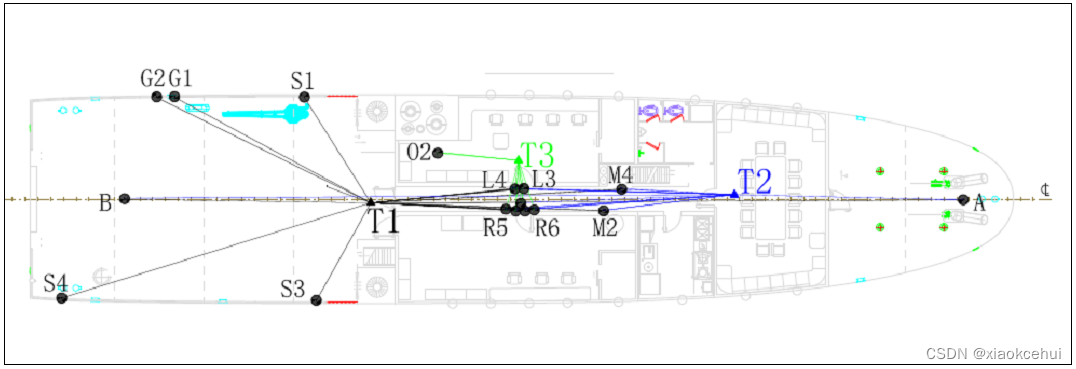
科考船长约40m,实地考察以后,计划布设3个测站T1~T3,T1布置于后甲板,T2布置于前甲板,T2布置于姿态传感器所在房间内。根据测站位置,尽可能多布设公共点。测量完成以后,导出各测站数据,测站及部分关键点坐标图见下图。
(2)将所有测点置于T1测站坐标系统
计算从T3和T2至T1的转换九参数。 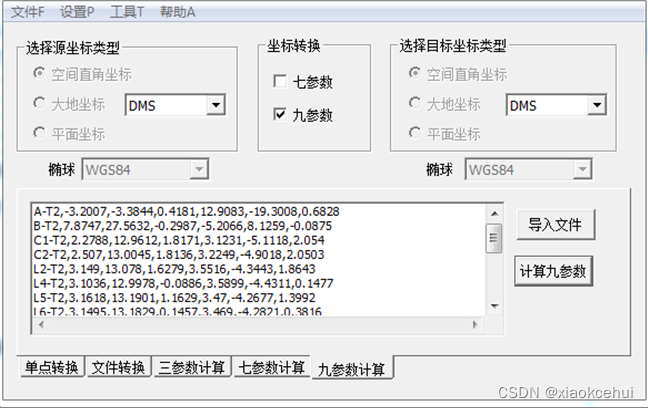
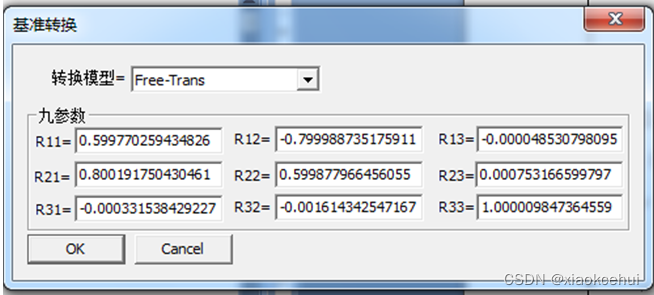
利用九参数,将T2和T3测点转换至T1坐标系统,得到了在T1坐标系统下的全部测站坐标。
(3)计算船舶坐标系统下各设备的位置和角度关系
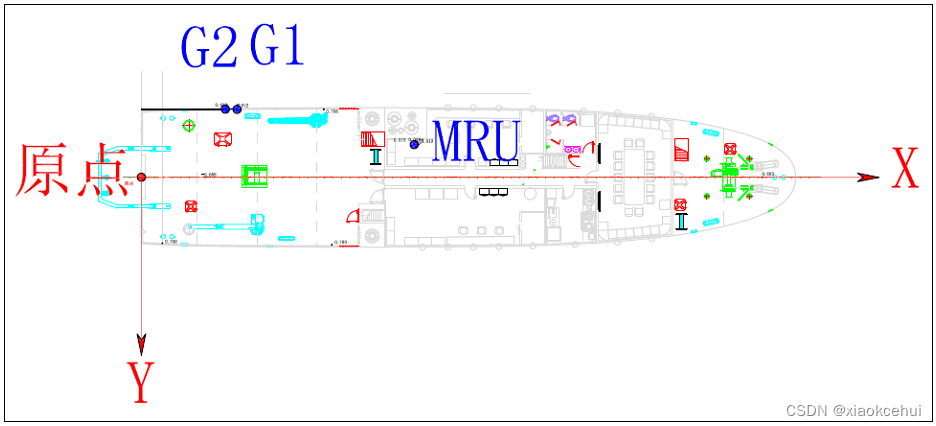
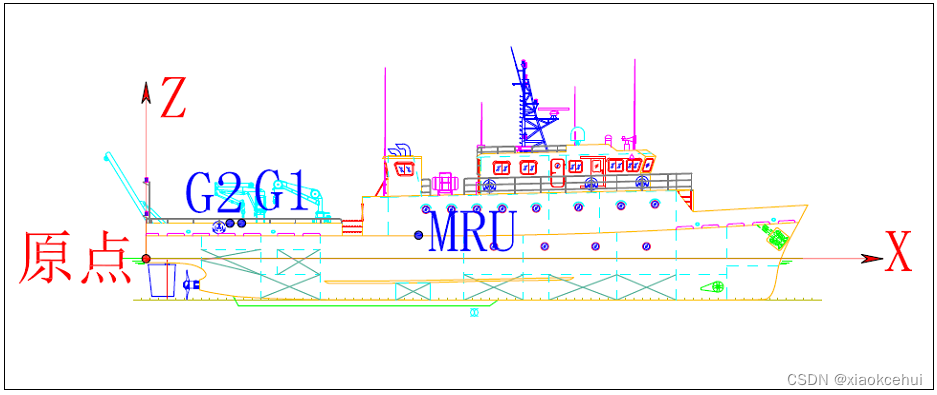
以船舶轴线为X轴(向前为正),船尾中心垂线与水线的交点为原点,船尾边线为Y轴(向右为正),垂直于XY平面为Z轴(向上为正),建立船舶坐标系统,获取MRU和多波束安装杆的位置以及船舶轴线与姿态传感器的航向的夹角。 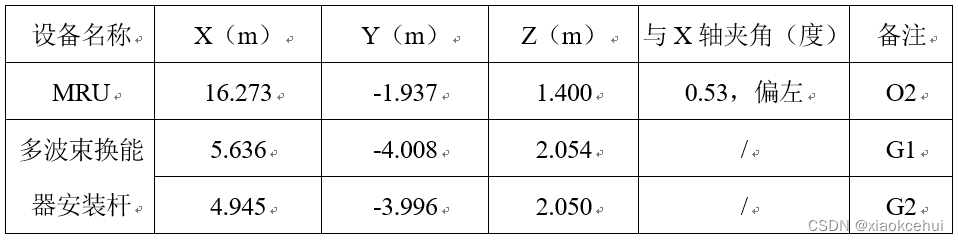
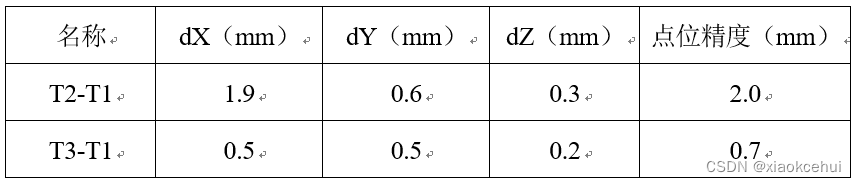
(4)精度评估
评估坐标转换精度及点位精度。