文章目录
- 1.线程池概念
- 2.线程池的优点
- 3.线程池的应用场景
- 4.线程池的实现
- 5.STL和智能指针和线程安全
- 5.1其他常见锁
- 5.2读写锁
1.线程池概念
线程池是一种线程使用模式。
线程过多会带来调度开销,进而影响缓存局部性和整体性能。而线程池维护着多个线
程,等待着监督管理者分配可并发执行的任务。
2.线程池的优点
- 线程池避免了在处理短时间任务时创建与销毁线程的代价。
- 程池不仅能够保证内核的充分利用,还能防止过分调度。
可用线程的数量取决于可用的并发处理器、处理器内核、内存、网络、sockets等。
3.线程池的应用场景
(1).需要大量的线程来完成任务,且完成任务的时间比较短。
比如:WEB服务器完成网页请求这样的任务,使用线程池技术是非常合适的。因为单个任务小,而任务数量巨大 。
(2). 对性能要求苛刻的应用,比如要求服务器迅速响应客户请求。
(3).接受突发性的大量请求,但不至于使服务器因此产生大量线程的应用。
突发性大量客户请求,在没有线程池情况下,将产生大量线程,短时间内产生大量线程可能使内存到达极限。
4.线程池的实现
线程池对外暴露一个接口push接口,用于任务的加入。
图示:

threadpool.hpp
实现线程模板:
#include <iostream>
#include <assert.h>
#include <queue>
#include <memory>
#include <cstdlib>
#include <pthread.h>
#include <unistd.h>
#include <sys/prctl.h>
using namespace std;
const int Thread_num=10;
template <class T>
class threadpool{
private:
threadpool(const int num=Thread_num):threadnum(num)
{
assert(threadnum>0);
isrunning=false;
pthread_cond_init(&cond_,nullptr);
pthread_mutex_init(&mutex_,nullptr);
}
threadpool(const threadpool<T> &)=delete; //拷贝构造
threadpool<T>& operator=(const threadpool<T>&)=delete;
public:
~threadpool(){
pthread_mutex_destroy(&mutex_);
pthread_cond_destroy(&cond_);
}
static threadpool<T>*getInstance(){
static pthread_mutex_t mutex_static;
if(instance==nullptr){
//判断是否需要创建线程池
pthread_mutex_lock(&mutex_static);
if(instance==nullptr){
instance=new threadpool<T>();
}
pthread_mutex_unlock(&mutex_static);
}
pthread_mutex_destroy(&mutex_static);
return instance;
}
//类内函数默认第一个参数是this指针,而由于线程的执行函数只有一个参数,所以设置为静态函数,否则第一个参数被this占用
static void* threadroutine(void* arg){
pthread_detach(pthread_self()); //分离线程
threadpool<T>* pool=static_cast<threadpool<T>* >(arg);
prctl(PR_SET_NAME, "follower");
//线程不断的获取任务,并执行
while (true)
{
pool->lockQueue();
//判断是否为空
//为空则等待唤醒
//不为空,取任务执行
while (!pool->haveTask())
{
pool->waitForTask();
}
T t=pool->pop();
int em1,em2;
char op;
t.get(&em1,&em2,&op);
cout << "consumer[" << pthread_self() << "] " << (unsigned long)time(nullptr)
<< " 消费了一个任务: " << em1 << op << em2 << "=" << t() << endl;
pool->unlockQueue();
}
return nullptr;
}
void start(){
assert(!isrunning);
for(int i=0;i<threadnum;i++){
pthread_t tid;
pthread_create(&tid,nullptr,threadroutine,(void*)instance);
}
}
void push(const T& t)
{
lockQueue();
workqueue_.push(t);
choiceThreadForHandler();
unlockQueue();
}
private:
void lockQueue() { pthread_mutex_lock(&mutex_); }
void unlockQueue() { pthread_mutex_unlock(&mutex_); }
bool haveTask() { return !workqueue_.empty(); }
void waitForTask() { pthread_cond_wait(&cond_, &mutex_); }
void choiceThreadForHandler() { pthread_cond_signal(&cond_); }
T pop()
{
T temp =workqueue_.front();
workqueue_.pop();
return temp;
}
queue<T> workqueue_; //工作队列
int threadnum; //线程数量
pthread_mutex_t mutex_;
pthread_cond_t cond_;
bool isrunning; //判断线程池是否允许
static threadpool<T>* instance;
};
template<class T>
threadpool<T>* threadpool<T>::instance=nullptr;
注意点:
- 当某线程被唤醒时,其可能是被异常或是伪唤醒,或者是一些广播类的唤醒线程操作而导致所有线程被唤醒,使得在被唤醒的若干线程中,只有个别线程能拿到任务。此时应该让被唤醒的线程再次判断是否满足被唤醒条件,所以在判断任务队列是否为空时,应该使用while进行判断,而不是if。
pthread_cond_broadcast函数的作用是唤醒条件变量下的所有线程,而外部可能只Push了一个任务,我们却把全部在等待的线程都唤醒了,此时这些线程就都会去任务队列获取任务,但最终只有一个线程能得到任务。一瞬间唤醒大量的线程可能会导致系统震荡。这个现象也叫做惊群效应
为什么线程函数要设置为静态类型?
- 类内函数默认第一个参数是this指针,而由于线程的执行函数只有一个参数,所以设置为静态函数,否则第一个参数被this占用
- 静态成员函数属于类,而不属于某个对象,也就是说静态成员函数是没有隐藏的this指针的,因此我们需要将Routine设置为静态方法,此时Routine函数才真正只有一个参数类型为
void*的参数。
测试文件
#include "threadpool.hpp"
#include "task.hpp"
#include <ctime>
#include <thread>
const std::string ops = "+-*/%";
int main()
{
prctl(PR_SET_NAME, "main");
//使用智能指针
unique_ptr<threadpool<Task>>pool(threadpool<Task>::getInstance());
pool->start();
//生产任务
srand((unsigned long)time(nullptr) ^ getpid() ^ pthread_self());
while (true)
{
int em1=rand()%100,em2=rand()%30;
char op=ops[rand()%4];
Task t(em1,em2,op);
pool->push(t);
cout << "producter[" << pthread_self() << "] " << (unsigned long)time(nullptr)
<< " 生产了一个任务: " << em1 << op << em2 << "=?" << endl;
sleep(1);
}
return 0;
}
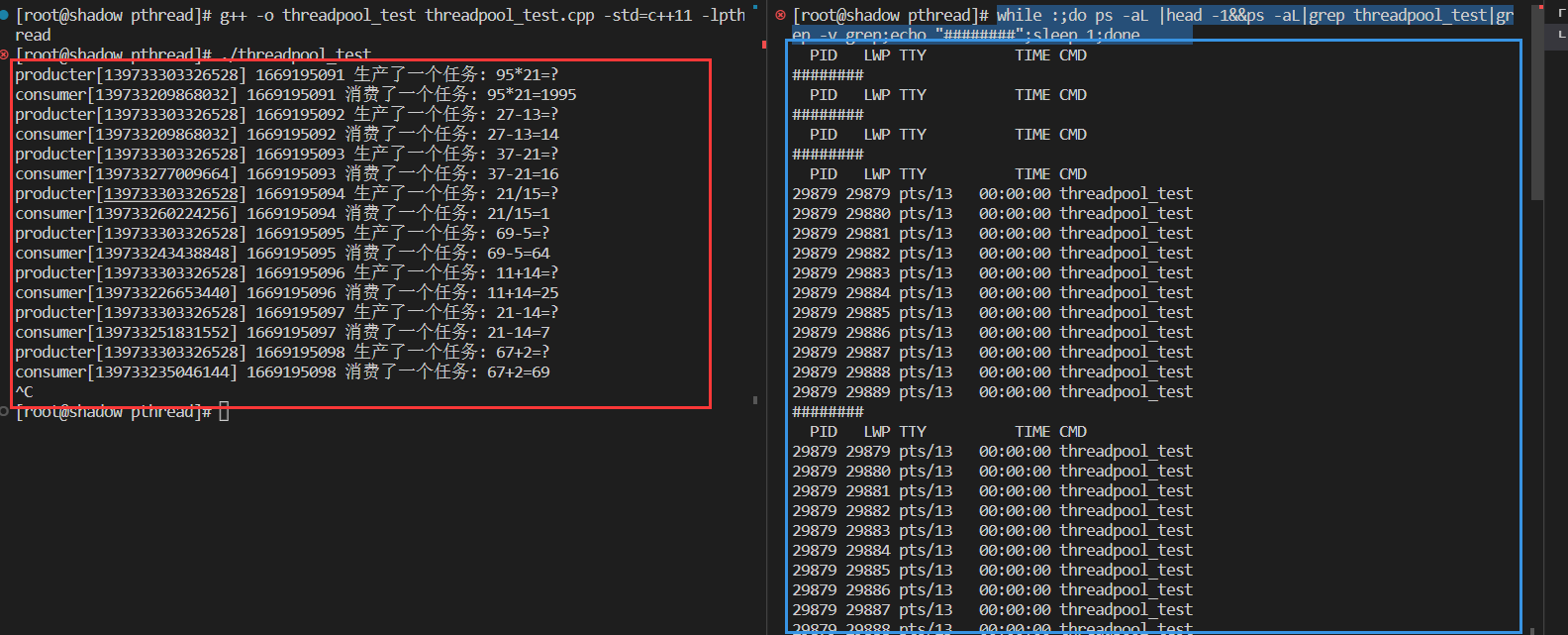
使用下面的指令对轻量级线程进行监控:
while :; ps -aL|grep -1&&ps -aL|grep threadpool_test|grep -v grep;echo "#######";sleep 1;done
执行结果:
5.STL和智能指针和线程安全
STL中的容器不是线程安全的
- STL 的设计初衷是将性能挖掘到极致, 而一旦涉及到加锁保证线程安全, 会对性能造成巨大的影响。
- 而且对于不同的容器, 加锁方式的不同, 性能可能也不同(例如hash表的锁表和锁桶).
- 因此 STL 默认不是线程安全. 如果需要在多线程环境下使用, 往往需要调用者自行保证线程安全
智能指针是否是线程安全的?
- 对于 unique_ptr, 由于只是在当前代码块范围内生效, 因此不涉及线程安全问题.
- 对于 shared_ptr, 多个对象需要共用一个引用计数变量, 所以会存在线程安全问题. 但是标准库实现的时候考虑到了这个问题, 基于原子操作(CAS)的方式保证 shared_ptr 能够高效, 原子的操作引用计数
5.1其他常见锁
- 悲观锁:在每次取数据时,总是担心数据会被其他线程修改,所以会在取数据前先加锁(读锁,写锁,
行锁等),当其他线程想要访问数据时,被阻塞挂起。 - 乐观锁:每次取数据时候,总是乐观的认为数据不会被其他线程修改,因此不上锁。但是在更新数据前,会判断其他数据在更新前有没有对数据进行修改。主要采用两种方式:版本号机制和CAS操作。
- CAS操作:当需要更新数据时,判断当前内存值和之前取得的值是否相等。如果相等则用新值更新。若不等则失败,失败则重试,一般是一个自旋的过程,即不断重试
自旋锁和挂起等待锁
- 自旋锁:轮询检测锁是否锁就绪
挂起等待锁适合在临界区长时间允许占有锁的情况。而挂起等待锁适合在临界区运行时间短,等待锁时间短的情况。
自旋锁的接口
pthread_spin_init();
与互斥锁的接口一样,只需要将mutex修改为spin即可
5.2读写锁
在编写多线程的时候,有一种情况是十分常见的。那就是,有些公共数据修改的机会比较少。相比较改写,它们读
的机会反而高的多。
通常而言,在读的过程中,往往伴随着查找的操作,中间耗时很长。给这种代码段加锁,会极大地降低我们程序的效率。而读写锁就可以解决读多写少的情况。
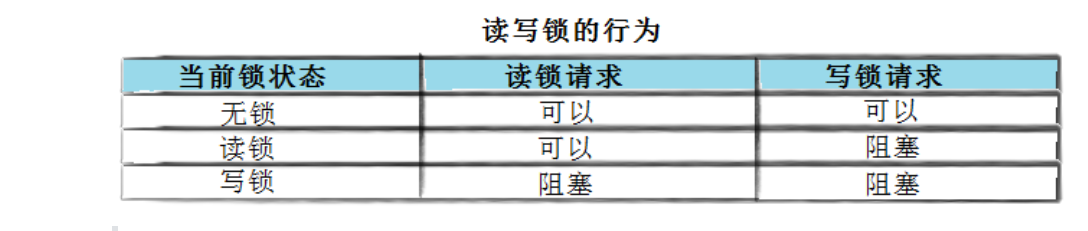
- **注意:写独占,读共享,读锁优先级高 **
接口
int pthread_rwlockattr_setkind_np(pthread_rwlockattr_t *attr, int pref);
/*
pref 共有 3 种选择
PTHREAD_RWLOCK_PREFER_READER_NP (默认设置) 读者优先,可能会导致写者饥饿情况
PTHREAD_RWLOCK_PREFER_WRITER_NP 写者优先,目前有 BUG,导致表现行为和
PTHREAD_RWLOCK_PREFER_READER_NP 一致
PTHREAD_RWLOCK_PREFER_WRITER_NONRECURSIVE_NP 写者优先,但写者不能递归加锁
*/
初始化
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock,const pthread_rwlockattr_t
*restrict attr);
销毁
int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);
**加锁和解锁 **
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);




![[附源码]java毕业设计氧气罐管理系统](https://img-blog.csdnimg.cn/46b2e1f38a5e4348bc2642f690c3c2dc.png)