目录
一、前言
二、算法讲解
1、Dijkstra--朴素算法:O(n * n)
2、Dijkstra--堆优化算法:O(mlogm)
3、Bellman_ford贝尔曼算法: O(n * m)
4、Spfa算法:O(n * m)
5、Spfa处理负环:O(n * m)
6、Floyd算法:O(n^3)
一、前言
最短路问题变化很多,不同数据范围的变化,也会导致算法运用的不同,下面给大家总结了不同最短路问题,不同数据范围应该用怎样的方式去解决。
二、算法讲解
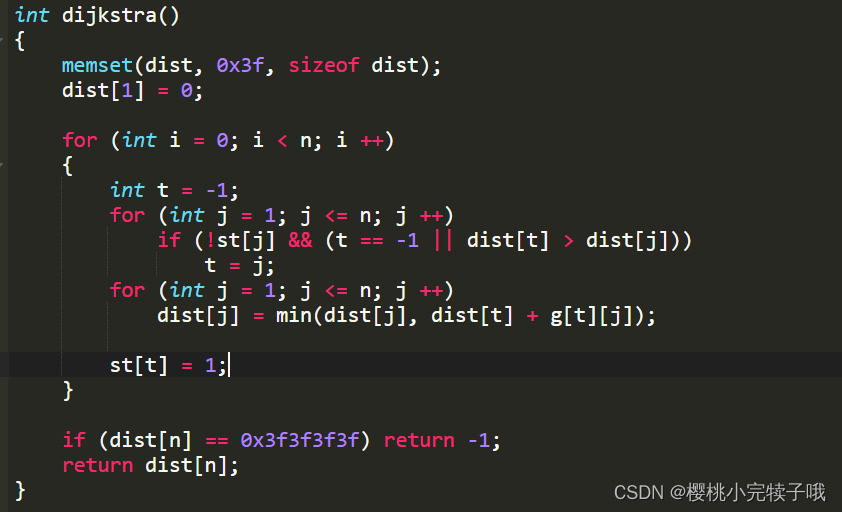
1、Dijkstra--朴素算法:O(n * n)
算法描述:
(1)初始化距离数组:dist[1] = 0, dist[i] = INF
(2)迭代n次,每次迭代确定一个min加入集合S(这里确定的min一定是上一次迭代所更新的所有邻边里的一条),n次迭代之后确定所有起点到所有点的最短距离
(3)将不在S集合中dist_min的点--->t
(4)t --->S
(5)用t更新到其他点的距离(相当于更新t的邻边)
算法简述:
简单来说,迭代后的效果就是利用每一次确定的一个点的最短距离,去更新他们的邻边的距离,n次迭代后,就确定了所有点到起点的最短距离。
适用范围:
适用于m >= n * n的无负权边的稠密图,用邻接矩阵存图。
代码实现:
2、Dijkstra--堆优化算法:O(mlogm)
算法描述:
(1)利用优先队列,代替朴素算法中找最小值那一步
(2)优先队列中存放两个关键字 距离 和 起点
(3)每次取出堆顶元素,即所有待更新中距离的最小值
(4)更新前需要判断,该点是否已经确定过了最短距离,若确定了,则跳过,反之则进行更新操作
(5)更新后,再将所更新的邻边加入堆中
算法简述:
简单来说,每次遍历确定一个堆顶元素(所有边中的最短距离),利用已经确定了最短距离的点,去更新他们的邻边,将这些更新邻边放入队列中,直至堆中没有元素,即所有点到起点的最短距离已经确定
适用范围:
适用于 n = m的无负权边的稀疏图,用邻接表存图。
代码实现:

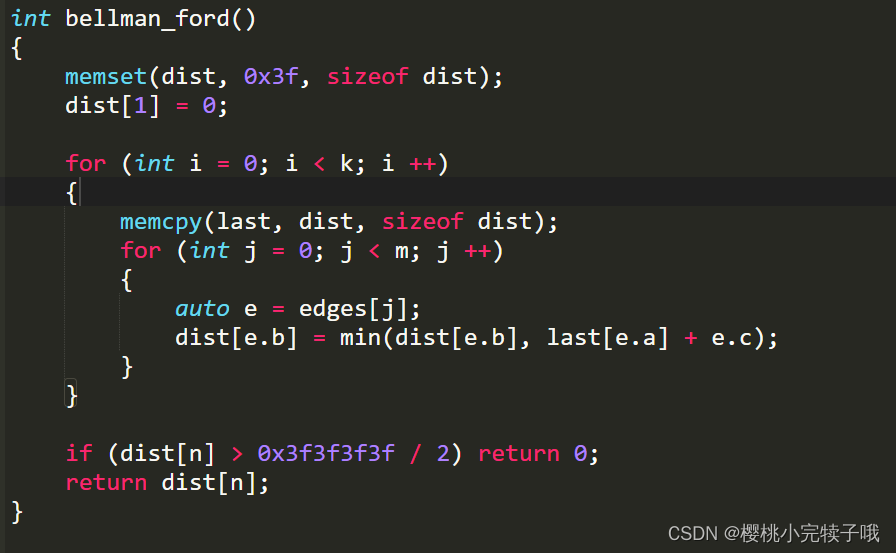
3、Bellman_ford贝尔曼算法: O(n * m)
算法描述:
(1)独特的存图方式 struct Edge{ int a, b, c;}edges[M];
(2)注意连锁想象需要备份
(3)初始化dist, 松弛dist[x.b] = min(dist[x.b], backup[x.a]+x.w);
(4)松弛k次,每次访问m条边
算法简述:
简单来说,经过k条边,循环k次,每次循环只会更新所有已经确定了的点的邻近的一条边,需要注意每一次循环利用上一次循环的结果,去更新本次循环的距离,所以需要备份
适用范围:
适用于有边数限制的最短路问题。
代码实现:
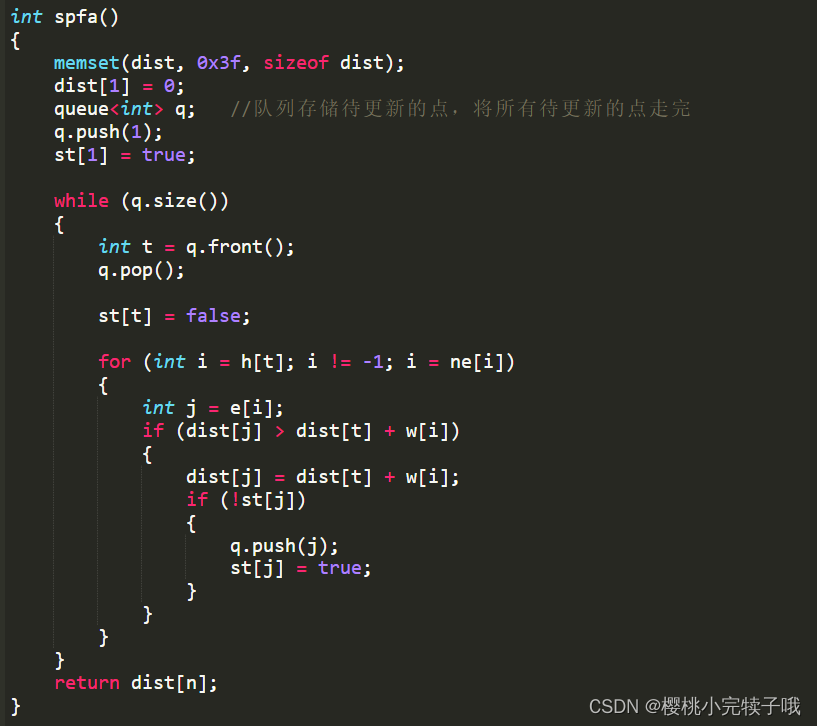
4、Spfa算法:O(n * m)
算法描述:
(1)利用队列优化贝尔曼算法中松弛一步进行优化
(2)将修改过最短距离的点加入队列中,因为修改了该点,其出边点的最短距离会变化,需要重新更新
(3)更新队列中当前点的所有出边
算法简述:
简单来说,就是将修改过了点,加入队列,用其重新更新其出边的点,直至队列中不存在值了,就说明所以点都找到了最短距离
适用范围:
n = m, 使用于存在负权边的稀疏图,用邻接表存
代码实现:
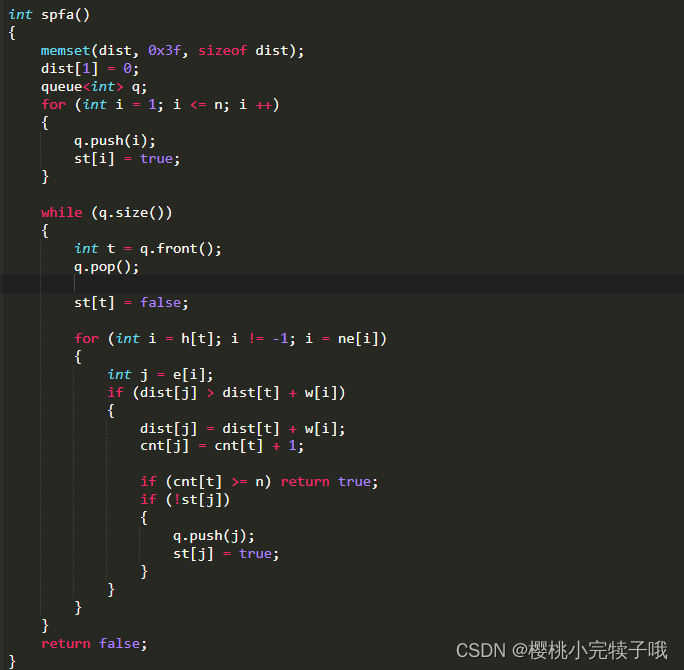
5、Spfa处理负环:O(n * m)
算法描述:
(1)若需要用来判断是否存在负环,则需要将所有的点都加入到队列中进行更新,因为可能起点1不在负环中
(2)在更新最短距离的同时,更新一下当前点的是第几次更新的结果,当前点的更新次数等于其入边的更新次数 + 1,即cnt[j] = cnt[t] + 1;
(3)判断当前点的更新次数有没有超过总点数n,超过了,说明有负权回路,即if (cnt[t] > n) return true;
算法简述:
简单来说,就是遍历所有的点,计数第i个点的最短距离是第几次更新得到的结果,如果是第n + 1及以上次更新得到,说明存在负权回路。
代码实现:
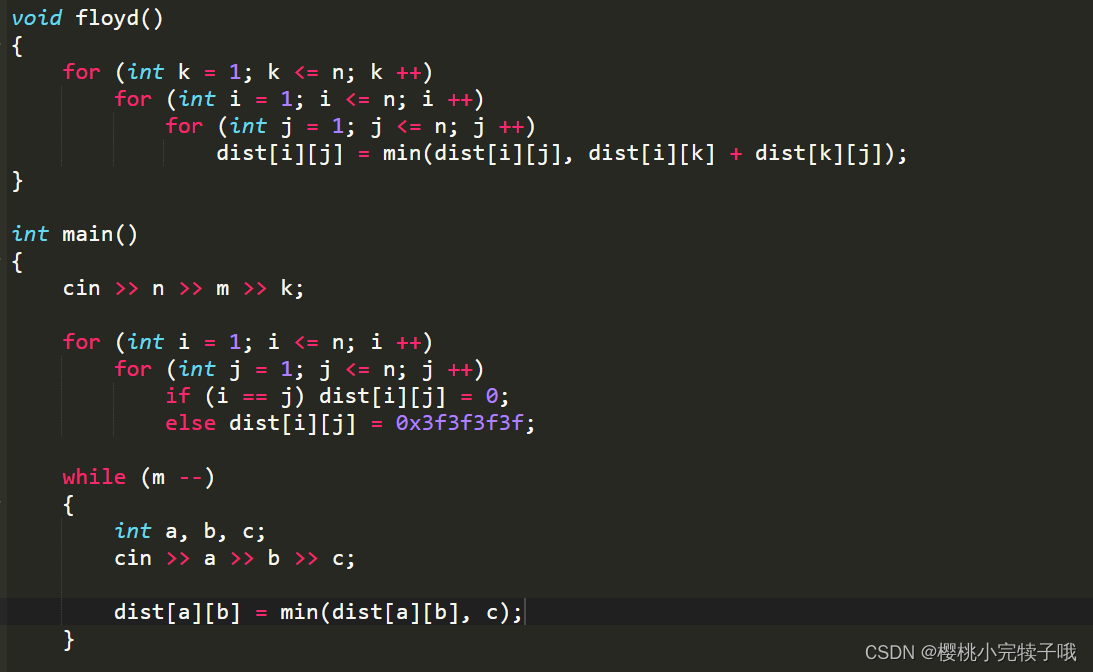
6、Floyd算法:O(n^3)
算法描述:
(1)独特初始化dist方式,如果i == j,则令其dist = 0, 反之为 0x3f3f3f3f,这样可以处理自环问题,
(2)根据动态规划的思想,用三层循环更新dist
(3)循环k, i, j, dist[i][j] = min(dist[i][j], dist[i][k] + dist[k][j]);
算法简述:
简单来说,就是三层循环,一个公式。
适用范围:
适用于多源化求最短路,即给你多组(a, b), 让你求出a ---> b的最短路径
代码实现:
码字不易,留下双击和关注吧!