关于激光雷达传感器(根据特性进行分类介绍)
- 0一些激光雷达的厂商总结
- 1 基本介绍
- 2 基本分类及组成
- 2.1 激光雷达的相关分类
- 2.1.1 机械式激光雷达:
- 2.1.2 混合固态激光雷达:
- 2.1.3 固态激光雷达:OPA和Flash固态激光雷达
- 2.2 机械式激光雷达系统组成
- 3 基本原理
- 3.1 工作过程:
- 3.2 测距原理
- 4 激光雷达域ROS
Author(作者): Nirvana Of Phoenixl
*Proverbs for you(送给你的哦):There is no doubt that good things will always come, and when it comes late, it can be a surprise.如有转载请注明,谢谢!
本文主要介绍关于激光传感器的分类,对于不同工作员的激光传感器,帮助记录并理解激光传感器。如有错误请指正,如转载请注明。
0一些激光雷达的厂商总结
激光雷达应用场合很多在机器人、无人驾驶、测绘、安防灯领域。



1 基本介绍
激光雷达传感器实际上可以分为两部分:激光和雷达。激光(Light Amplification by Stimulated Emission of Radiation)原子受激辐射的光,故名“激光”其光子光学特性高度一致。因此激光相比普通光源单色性、方向性好,亮度更高。雷达,是英文Radar的音译,源于radio detection and ranging的缩写,意思为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。雷达是利用电磁波探测目标的电子设备。雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。
激光雷达(英文:Laser Radar),是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。

2 基本分类及组成
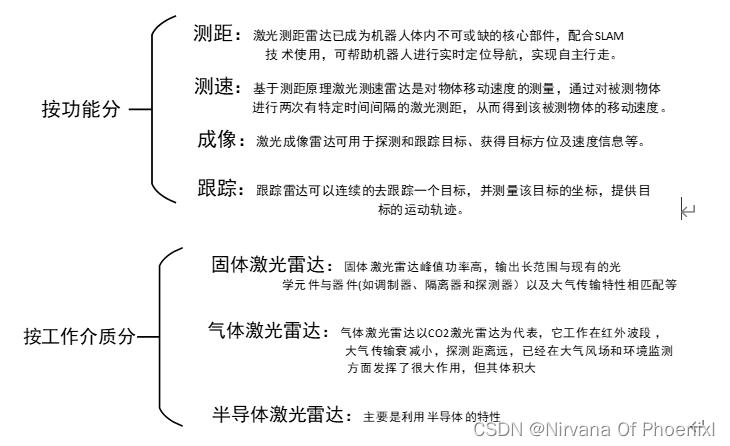
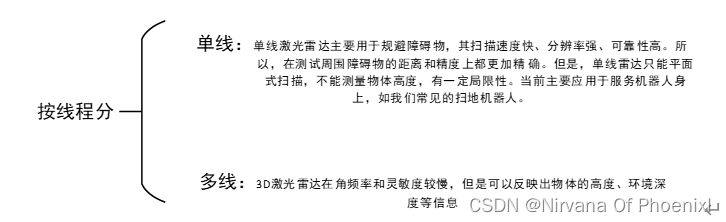
2.1 激光雷达的相关分类
激光雷达应用场合很多在机器人、无人驾驶、测绘、安防等领域应用。按照不同的标准和方式可以将其分为不同的类别。下面介绍几种分类,在目前来说最明显也最广泛的分类为按照结构或者扫描方式分类。
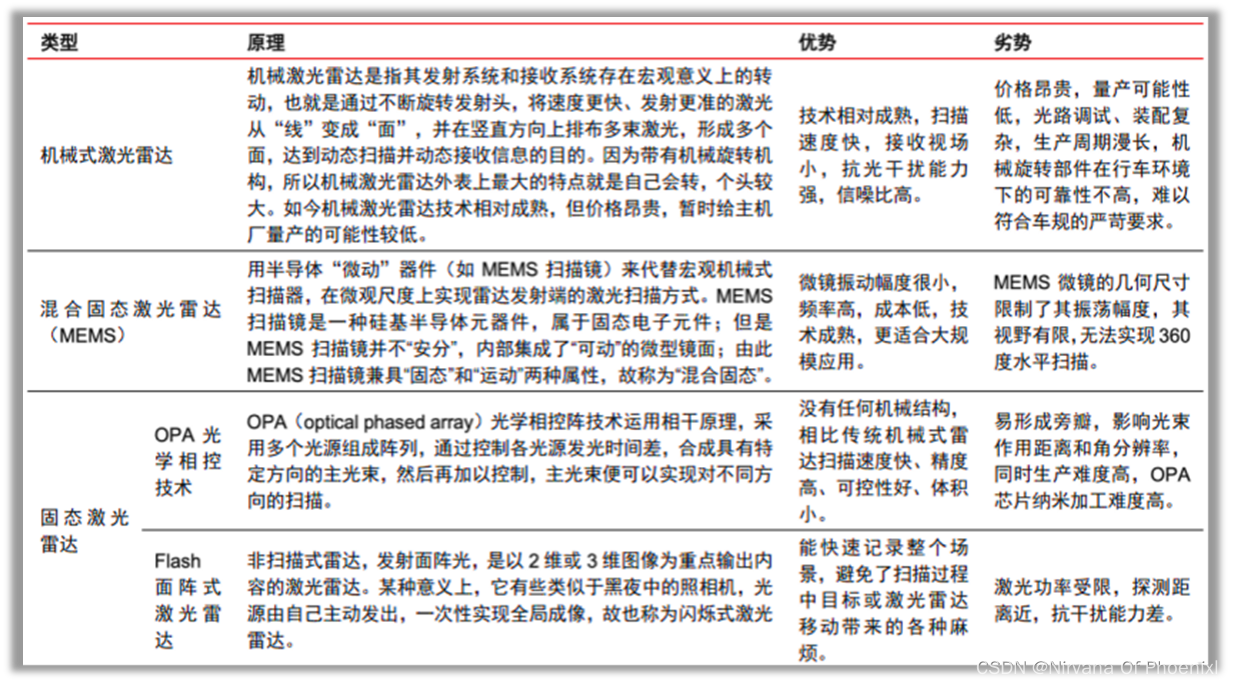
通常来说我们会将激光雷达按照结构分为三类:机械式激光雷达、固态激光雷达、混合固态激光雷达。
2.1.1 机械式激光雷达:
指其发射系统和接收系统存在宏观意义上的转动,也就是通过不断的旋转发射头,将速度根块、发射更准的激光从“线”变成“面”,并在竖直方向上排布多束激光,形成多个面,达到动态扫描并动态接收信息的目的。因其带有机械旋转机构,其最大特点是自生可以转动。也是目前应用最为广泛的和成熟的激光传感器,在激光雷达市场占有统治地位。
2.1.2 混合固态激光雷达:
机械式激光雷达在工作时发射系统和接收系统360°旋转,而混合固态激光雷达工作时,但从外观上是看不到旋转的,巧妙之处在于将机械旋转部件做的更加小巧且深深隐藏于外壳。
2.1.3 固态激光雷达:OPA和Flash固态激光雷达

2.2 机械式激光雷达系统组成
激光雷达主要包括激光发射、扫描系统、激光接收和信息处理四大系统,这四个系统相辅相成,形成传感闭环。首先激光发射系统中激励源周期性地驱动激光器,发射激光脉冲,激光调制器通过光束控制器控制发射激光的方向和线数,最后通过发射光学系统,将激光发射至目标物体;扫描系统负责以稳定的转速旋转起来,实现对所在平面的扫描,并产生实时的平面图信息;激光接收系统中光电探测器接受目标物体反射回来的激光,产生接收信号;信息处理系统中接收信号经过放大处理和数模转换,经由信息处理模块计算,获取目标表面形态、物理属性等特性,最终建立物体模型。
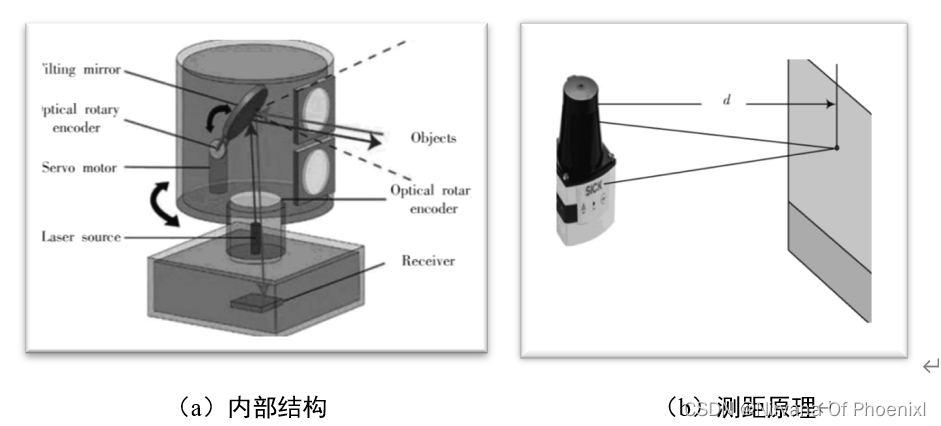
机械式激光雷达传感器
3 基本原理
3.1 工作过程:
激光雷达的工作过程与雷达工作原理类似,激光雷达通过测量激光信号的时间差和相位差来确定距离,但其最大优势在于能够利用多谱勒成像技术,创建出目标清晰的 3D 图像。激光雷达通过发射和接收激光束,分析激光遇到目标对象后的折返时间,计算出到目标对象的相对距离(下图),并利用此过程中收集到的目标对象表面大量密集的点的三维坐标、反射率和纹理等信息,快速得到出被测目标的三维模型以及线、面、体等各种相关数据,建立三维点云图,绘制出环境地图,以达到环境感知的目的。由于光速非常快,飞行时间可能非常短,因此要求测量设备具备非常高的精度。从效果上来讲,激光雷达维度(线束)越多,测量精度越高,安全性就越高。
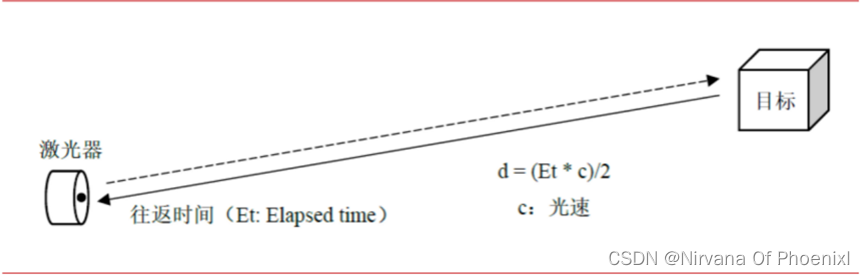
3.2 测距原理
相比于可见光、红外线等传统被动成像技术,激光雷达技术具有如下显著特点:一方面,它颠覆传统的二维投影成像模式,可采集目标表面深度信息,得到目标相对完整的空间信息,经数据处理重构目标三维表面,获得更能反映目标几何外形的三维图形,同时还能获取目标表面反射特性、运动速度等丰富的特征信息,为目标探测、识别、跟踪等数据处理提供充分的信息支持、降低算法难度;另一方面,主动激光技术的应用,使得其具有测量分辨率高,抗干扰能力强、抗隐身能力强、穿透能力强和全天候工作的特点。

4 激光雷达域ROS
基于ROS 的激光雷达传感器在每次测距时,都采用激光三角测距技术,产生激光扫描区域周围的环境,在通过实时监测导航遇到障碍物反射回来的激光测距信号,就可以快速得到周围物体与移动机器人之间的距离,降低导航的横向偏差。
ROS中激光雷达的数据就是一串距离值,每隔1度一个距离值(具体情况得看激光雷达的参数),通过实测激光雷达的数据并保存,在利用串口或者网口与具体系统通信,实现数据交互。
ROS中涉及激光雷达传递的消息类型有两种,一种是针对2D雷达:sensor_msgs::LaserScan;一种是针对3D雷达的即点云数据的:sensor_msgs::PointCloud2。其中2D激光雷达LaserScan,3D点云数据PointCloud2。