第7章:失速
目录
- 引言
- 失速的原因
- 升力曲线
- 失速恢复
- 接近失速时的飞机行为
- 接近失速时的飞行控制使用
- 失速识别
- 失速速度
- 失速警告
- 人工失速警告装置
- 基本失速要求(EASA和FAR)
- 机翼设计特性
- 翼型剖面的影响
- 机翼平面形状的影响
- 关键要点1
- 超失速(深度失速)
- 超失速预防-推杆装置
- 影响失速速度的因素
- 1g失速速度
- 重量变化对失速速度的影响
- 力的合成与分解
- 使用三角函数分解力
- 水平转弯中的升力增加
- 载荷系数对失速速度的影响
- 高升力装置对失速速度的影响
- 重心位置对失速速度的影响
- 起落架对失速速度的影响
- 发动机功率对失速速度的影响
- 马赫数(可压缩性)对失速速度的影响
- 机翼污染对失速速度的影响
- 对飞行员关于结冰引起失速的警告
- 由于结冰导致的稳定器失速
- 大雨对失速速度的影响
- 鸭式布局的失速和恢复特性
- 螺旋
- 螺旋的主要原因
- 螺旋的阶段
- 质量和平衡对螺旋的影响
- 螺旋恢复
- 失速的特殊现象
- 高速抖振(激波失速)
- 第173页问题的答案
- 关键要点2
- 问题
- 关键要点1(完成)
- 关键要点2(完成)
- 答案
注意:本章中将参考EASA认证规范(CS23,CS25)失速要求等,但必须强调,这些参考仅供培训目的,不受修订行动的约束。
引言
失速是一种潜在危险的机动,涉及高度损失和控制丧失。飞行员必须能够清晰明确地识别即将发生的失速,以便防止它发生。不同类型的飞机表现出各种失速特性,有些比其他的更不理想。适航当局规定了飞机必须具备的最低失速品质。
失速的原因
翼型的升力系数( C L \mathrm{C}_{\mathrm{L}} CL)随攻角增加而增加,直至最大值( C LMAX C_{\text{LMAX}} CLMAX)。任何超过这个失速角或临界攻角的进一步增加,都将使气流无法平滑地沿上翼面轮廓流动,气流将从表面分离,导致 C L C_{L} CL减小,阻力迅速增加。由于翼型的 C LMAX \mathrm{C}_{\text{LMAX}} CLMAX对应于最小稳定飞行速度(1g失速速度),它是一个重要的参考点。
失速是由气流分离引起的。当边界层缺乏足够的动能或逆压梯度变得过大时,就会发生分离。
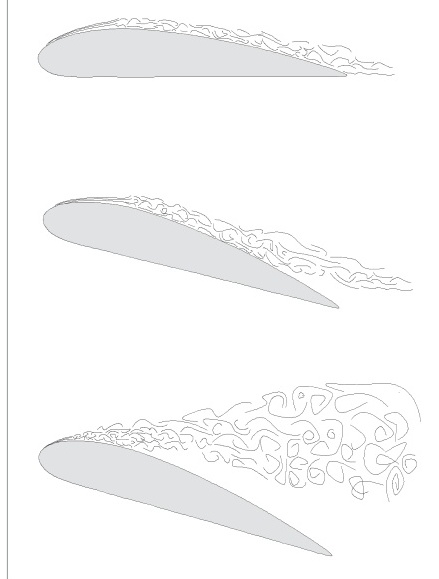
图7.1显示,在低攻角下,几乎没有气流在后缘前分离,气流以湍流边界层的形式附着在表面后部。
随着攻角增加,逆压梯度增加,减少了动能,边界层将开始从后缘处的表面分离。
攻角进一步增加使分离点向前移动,产生压力差的机翼面积变小。在高于约 1 6 ∘ 16^{\circ} 16∘的攻角下,极其陡峭的逆压梯度将导致如此多的分离,以至于产生的升力不足以平衡飞机重量。
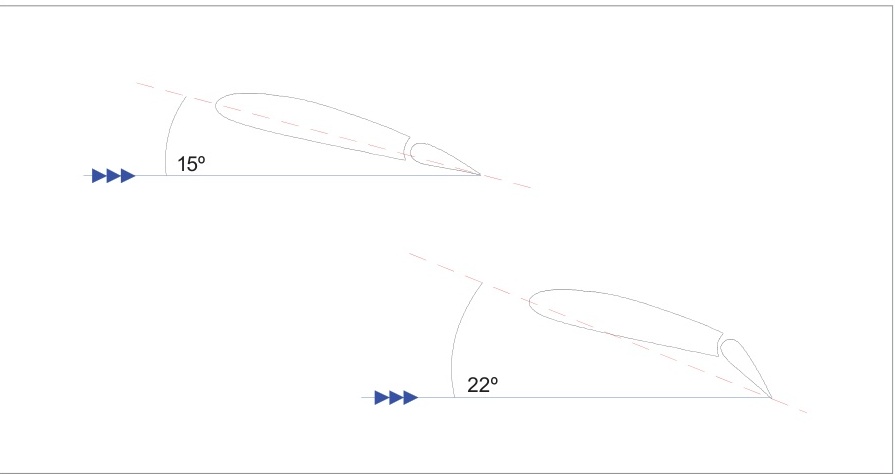
重要的是要记住,攻角是弦线与相对气流之间的角度。因此,如果攻角增加到临界角或超过临界角,飞机可以在任何空速或飞行姿态下失速。——飞机可以在任何空速或姿态下失速。
升力曲线
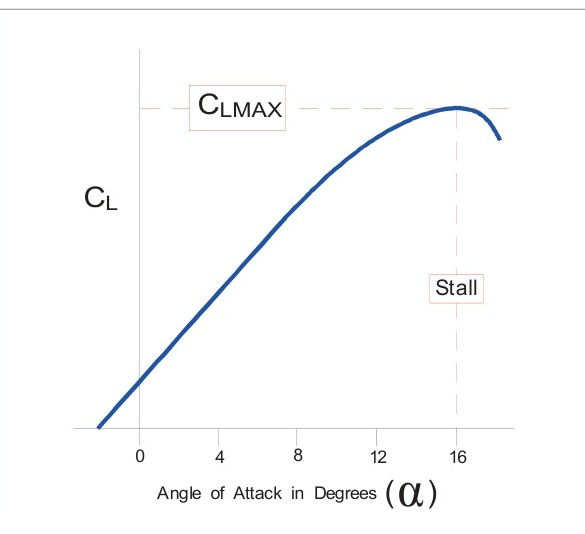 图7.2
图7.2
图7.2显示,当攻角从零升力值增加时,曲线在相当大的范围内是线性的。随着分离效应开始被感觉到,曲线的斜率开始下降。最终,升力达到最大值并开始减小。发生这种情况的角度称为失速角或临界攻角,相应的升力系数值是 C L M A \mathrm{C}_{\mathrm{LMA}} CLMAx。典型的失速角约为 1 6 ∘ 16^{\circ} 16∘。
失速恢复
要从失速中恢复或防止完全失速,必须减小攻角以减少逆压梯度。这可能仅仅包括释放后压力,或者可能需要平稳地向前移动俯仰控制,取决于飞机设计和失速的严重程度。(然而,过度向前移动俯仰控制可能会对机翼施加负载荷并延迟恢复)。对于大多数现代喷气式运输机,通常只需将机头降低到地平线或略低于地平线,同时应用最大授权功率以最小化高度损失。
在直翼飞机上,应使用方向舵防止失速和恢复过程中的机翼下沉。在后掠翼飞机上,建议使用副翼防止机翼下沉,并配合少量平稳应用的协调方向舵。(现代高速喷气式运输机上的方向舵非常强大,粗心使用可能会产生过多的滚转,导致飞行员诱导振荡 - PIO)。
允许空速增加,并通过对俯仰控制适度的后压力恢复失去的高度。拉得太用力可能会触发二次失速,或更糟,可能会超过极限载荷系数并损坏飞机结构。随着攻角降低到临界角以下,逆压梯度将减小,气流将重新附着,升力和阻力将恢复到正常值。
接近失速时的飞机行为
失速特性因不同类型的飞机而异。然而,对于现代飞机在大多数正常机动中,失速的开始是渐进的。失速的第一个迹象可能由以下任何或所有情况提供:
-
飞行控制反应迟钝,
-
失速警告或失速预防装置,或
-
空气动力学抖振。
各种飞机类型的详细行为将在后面讨论。
接近失速时的飞行控制使用
在通常与失速相关的低速下,动压处于非常低的值,需要更大的控制偏转才能达到相同的响应;此外,飞行控制将感觉不灵敏或"软绵绵"。如果发生意外失速,至关重要的是失速和恢复应该在没有太多机翼下沉的情况下发生。移动控制面会修改弦线,因此也会修改攻角。一架接近失速角飞行的飞机可能有一个机翼产生的升力略低于另一个;那个机翼将倾向于下沉。尝试用副翼抬起下沉的机翼将增加其攻角,图7.3,并可能导致机翼完全失速,导致该机翼以更快的速度下沉。在接近失速的速度下,必须谨慎使用副翼。在直翼飞机上,应使用方向舵使飞机偏航,刚好足以增加下沉机翼的速度以保持机翼水平姿态。后掠翼飞机的基本失速要求设计为使副翼能够成功地使用到"失速识别"(第148页和第154页),但如果平稳应用并与副翼协调,可以使用少量方向舵。
失速识别
当飞机的行为给飞行员一个明确且具有可接受性质的明显指示时,飞机被认为已失速。
可接受的失速指示,单独或组合出现,包括:
(1) 无法轻易阻止的机头向下俯冲;
(2) 强度和严重程度足以强烈有效地阻止进一步减速的抖振;或
(3) 俯仰控制达到后止动点,并且在恢复开始前控制保持完全向后一段时间时,不再发生俯仰姿态的增加。
失速速度
在起飞和着陆期间需要以低速(高攻角)飞行,以便将所需的跑道长度保持在合理的最小值。正常操作允许的最低速度与失速速度之间必须有足够的安全裕度。
原型机在型号认证前进行的飞行测试中进行失速测试,并确定失速速度以纳入飞行手册。
"小型"飞机(CS-23)使用 V s 0 V_{s0} Vs0和 V s 1 V_{s1} Vs1作为失速速度的基础。
对于"大型"飞机(CS-25),使用参考失速速度 V S R V_{SR} VSR。
- 参考失速速度 ( V S R ) \left(V_{SR}\right) (VSR)是由飞机制造商定义的校准空速。 V S R V_{SR} VSR不得小于1g失速速度。 V S R V_{SR} VSR表示为:
V S R ≥ V C L M A X n Z W V_{SR}\geq \frac {V_{CLMAX}}{\sqrt {n_{ZW}}} VSR≥nZWVCLMAX
其中:
| 变量 | 解释 |
|---|---|
| V CLMAX V_{\text{CLMAX}} VCLMAX | 在第149页星号项目中规定的机动过程中,当载荷系数校正的升力系数首次达到最大值时获得的校准空速。 |
| 此外,当机动受到在选定攻角处突然将机头向下推的装置(例如推杆)限制时, V CLMAX V_{\text{CLMAX}} VCLMAX不得小于该装置操作瞬间存在的速度。 | |
| n z w \mathrm{n}_{\mathrm{zw}} nzw | V CLMAX V_{\text{CLMAX}} VCLMAX时垂直于飞行路径的载荷系数 |
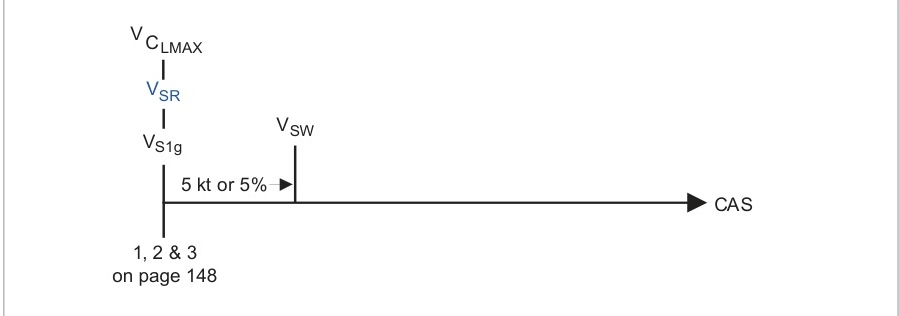
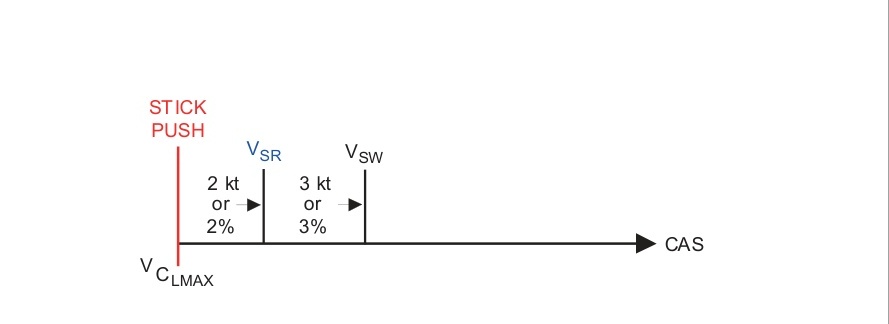
注意:在没有推杆的飞机上, V S R V_{SR} VSR可以被认为与1g失速速度 ( V s 1 g ) \left(V_{s1g}\right) (Vs1g)相同。但是,不可能以低于推杆激活速度的速度飞行,因此对于装有推杆的飞机, V S R V_{SR} VSR将比推杆激活速度高2节或 2 % 2\% 2%。(参见图7.4和图7.5,了解失速速度和失速警告的标识说明)。
从第76页的"样本"飞机,在 C LMAX \mathrm{C}_{\text{LMAX}} CLMAX时的速度为 150 k t 150kt 150kt。这可以被视为该飞机的 V C L M A X \mathrm{V}_{\mathrm{CLMAX}} VCLMAX。在 1 g 1\mathrm{g} 1g时, V S R \mathrm{V}_{\mathrm{SR}} VSR因此为150 kt。
-
V CLMAX V_{\text{CLMAX}} VCLMAX的确定条件为:
-
在失速速度时零推力。
-
螺旋桨俯仰控制(如适用)处于起飞位置。
-
飞机在其他方面(如襟翼和起落架)处于使用 V S R V_{SR} VSR的测试或性能标准中存在的状态。
-
当 V S R V_{SR} VSR被用作确定是否符合所需性能标准的因素时所使用的重量。
-
导致参考失速速度最高值的重心位置;以及
-
飞机调整为直线飞行,速度由制造商选择,但不低于 1.13 V S R 1.13\mathrm{V}_{\mathrm{SR}} 1.13VSR且不高于 1.3 V S R 1.3\mathrm{V}_{\mathrm{SR}} 1.3VSR*
-
-
*从稳定的配平状态开始,施加纵向控制以减速飞机,使速度减小不超过每秒一节。
-
除了上述要求外,当安装了在选定攻角处突然将机头向下推的装置(例如推杆)时,参考失速速度 V S R V_{SR} VSR不得小于该装置操作速度之上2节或 2 % 2\% 2%,以较大者为准。
V S R V_{SR} VSR将随上述每个条件而变化。影响 V S R V_{SR} VSR的其他因素包括载荷系数、超过零的推力和机翼污染。所有这些影响将在后面详细说明。
失速警告
在为每种构型确定了失速速度后,必须有明确且明显的警告,在失速前有足够的提前量,以避免失速本身。
(a) 在任何正常位置的襟翼和起落架下,必须向飞行员提供足够的裕度以防止在直线和转弯飞行中意外失速的明确且明显的警告。
(b) 警告可以通过飞机固有的空气动力学特性或通过在预期飞行条件下提供明显区分指示的装置提供。然而,需要驾驶舱内机组人员注意的视觉失速警告装置本身是不可接受的。如果使用警告装置,它必须在本段(a)项规定的飞机每种构型下,按照本段©和(d)项规定的速度提供警告。
© 当速度以不超过每秒1节的速率减小时,失速警告必须在每种正常构型下,以速度 V s w V_{sw} Vsw开始,该速度超过按照第148页失速识别确定的失速速度不少于5节或 5 % 5\% 5%校准空速,以较大者为准。一旦启动,失速警告必须持续到攻角降低到大约失速警告开始时的攻角。
(d) 除了本段©项的要求外,当速度以不超过每秒一节的速率减小时,在直线飞行中发动机怠速和重心位置如第149页所述,每种正常构型下的 V w ′ V_{w'} Vw′必须超过 V S R V_{SR} VSR不少于3节或 3 % 3\% 3%校准空速,以较大者为准。
(e) 失速警告裕度必须足够,使飞行员能够防止失速(如第148页 - 失速识别中定义),当在失速警告开始后不少于一秒钟开始恢复时,在减速转弯中至少有1.5g垂直于飞行路径的载荷系数和至少每秒2节的空速减速率,襟翼和起落架处于任何正常位置,飞机调整为1.3 V S R V_{SR} VSR的直线飞行,并具有保持1.3 V S R V_{SR} VSR水平飞行所需的功率或推力。
(f) 在系统故障后可能使用的高升力装置的每种异常构型中也必须提供失速警告(包括飞行手册程序涵盖的所有构型)。
人工失速警告装置
充分的失速警告可能由气流相对较早分离并通过摇晃机翼产生空气动力学抖振以及通过抖动尾翼提供,这可能通过升降舵控制传递并摇晃控制柱,但这通常不够充分,因此通常在所有飞机上安装模拟自然抖振的装置。
小型飞机上的人工失速警告通常由蜂鸣器或喇叭提供。现代大型飞机上使用的人工失速警告装置是操纵杆抖动器,结合灯光和噪音发生器。
操纵杆抖动器
操纵杆抖动器代表它所替代的东西;它摇晃操纵杆并提供触觉警告。如果操纵杆抖动器在飞行员手不在控制装置上时激活,例如当飞机处于自动驾驶状态时,非常安静的操纵杆抖动器可能无法作为失速警告发挥作用,因此会并行添加噪音发生器。
操纵杆抖动器是一对简单的电动机,每个都夹在飞行员的控制柱上,旋转不平衡重量。当电机运行时,它会摇晃操纵杆。
人工失速警告装置可以从多种不同类型的探测器开关接收信号,所有这些开关都由攻角变化激活。
拍板开关(前缘失速警告叶片)
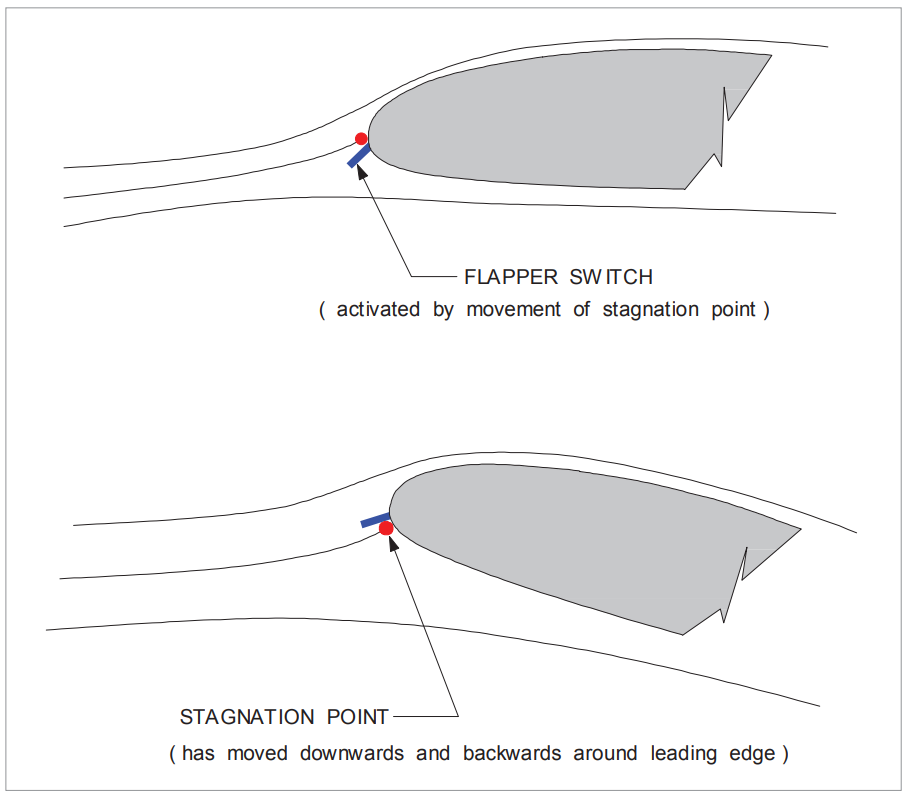
图7.6。随着攻角增加,驻点向下移动并绕前缘向后移动。拍板开关的位置使得在适当的攻角下,驻点移动到其下侧,增加的压力抬起并关闭开关。
攻角叶片
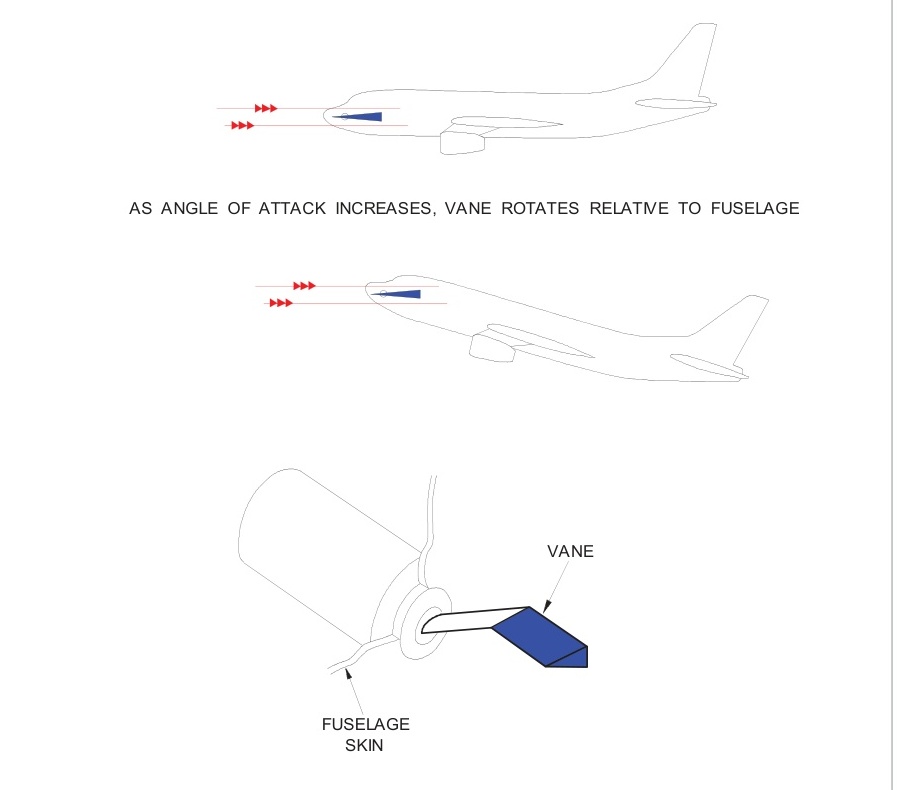
图7.7。安装在机身侧面,叶片与相对气流流线型,机身围绕它旋转。操纵杆抖动器在适当的攻角下激活。
攻角探头
也安装在机身侧面,它由探头中的槽组成,对相对气流角度的变化敏感。
所有这些都感知攻角,因此自动考虑飞机质量的变化;大多数还计算攻角变化率,并在接近失速的速率更快的情况下提供更早的警告。探测器通常针对构型变化进行基准补偿,并且始终加热或防冰。通常在两侧都有传感器,以抵消任何侧滑效应。
基本失速要求(EASA和FAR)
-
在飞机失速之前,必须能够通过不反向使用副翼和方向舵产生和纠正滚转和偏航。不得出现异常的机头上仰。纵向控制力必须在失速前和整个失速过程中保持正值。此外,必须能够通过正常使用控制装置迅速防止失速并从失速中恢复。
-
对于水平机翼失速,在失速和恢复完成之间发生的滚转不得超过约20°。
-
对于转弯飞行失速,失速后飞机的动作不得过于剧烈或极端,以至于使用正常的驾驶技巧难以进行迅速恢复并重新获得对飞机的控制。恢复过程中发生的最大坡度角不得超过:
-
在原转弯方向约60度,或在相反方向30度,对于减速率不超过每秒1节;以及
-
在原转弯方向约90度,或在相反方向60度,对于减速率超过每秒1节。
-
机翼设计特性
已经表明,失速是由气流分离引起的,特征是升力损失和阻力增加,这将导致飞机失去高度。这通常是正确的,但飞机在失速或接近失速时的行为和操控方面有些取决于机翼翼型剖面和平面形状的设计。
翼型剖面的影响
翼型剖面的形状将影响其失速方式。对于某些剖面,失速发生得非常突然,升力下降非常明显。对于其他剖面,接近失速更加渐进,升力的减少不那么灾难性。
一般来说,飞机不应该太突然地失速,飞行员应该在操控品质方面得到充分的警告,表明失速的接近。这种警告通常表现为抖振和对控制的整体反应不足。如果特定的机翼设计失速太突然,将需要提供某种人工预失速警告装置,甚至失速预防装置。
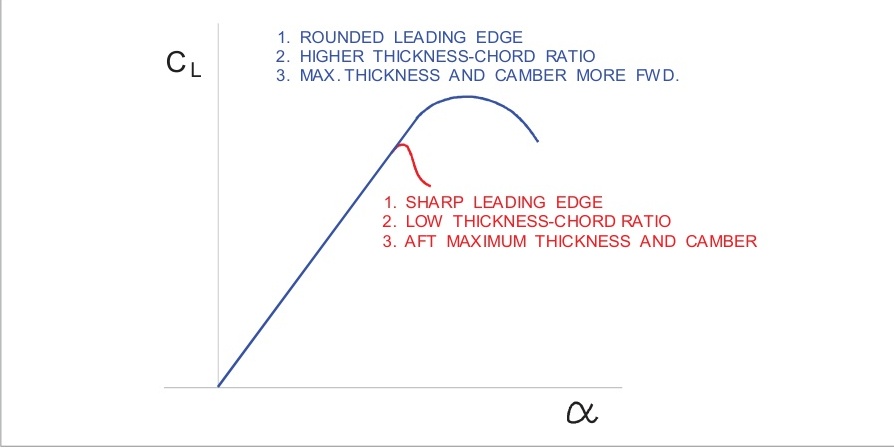
影响接近失速时行为的翼型剖面设计特征包括:
-
前缘半径,
-
厚弦比,
-
弯度,特别是靠近前缘的弯度量,以及
-
最大厚度和最大弯度点的弦向位置。
一般来说,机头越尖锐(前缘半径小),翼型剖面越薄,或最大厚度和弯度位置越靠后,失速就越突然。例如,为高速高效运行设计的翼型剖面,图7.8。
上述列出的翼型剖面的失速特性可用于鼓励失速发生,或延迟失速,在机翼跨度上的特定位置。
机翼平面形状的影响
在基本机翼平面形状上,气流分离不会在所有展向位置同时发生。
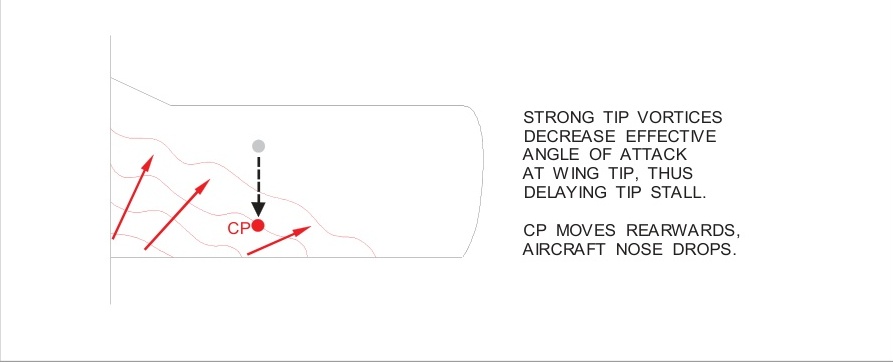
矩形机翼
图7.9。在矩形机翼上,分离倾向于从根部开始,并向翼尖扩散。升力的减少最初发生在靠近飞机重心的内侧,如果它在一个机翼上比另一个先发生,飞机几乎没有滚转的倾向。飞机失去高度,但在这样做时,它或多或少保持机翼水平。升力损失在飞机重心前方感觉到,压力中心向后移动,因此机头下降,攻角减小。因此,飞机自然倾向于远离导致失速的高攻角。来自根部的分离气流浸没后机身和尾部区域,空气动力学抖振可以提供接近失速的警告。由于位于分离气流区域之外,副翼在失速过程开始时往往保持有效。所有这些因素提供了对失速最理想的响应类型:
-
副翼有效性,
-
机头下降,
-
空气动力学抖振,以及
-
没有剧烈的机翼下沉。
不幸的是,矩形机翼具有不可接受的机翼弯曲特性,并且空气动力学效率不是很高,因此大多数现代飞机都有锥形和/或后掠平面形状。
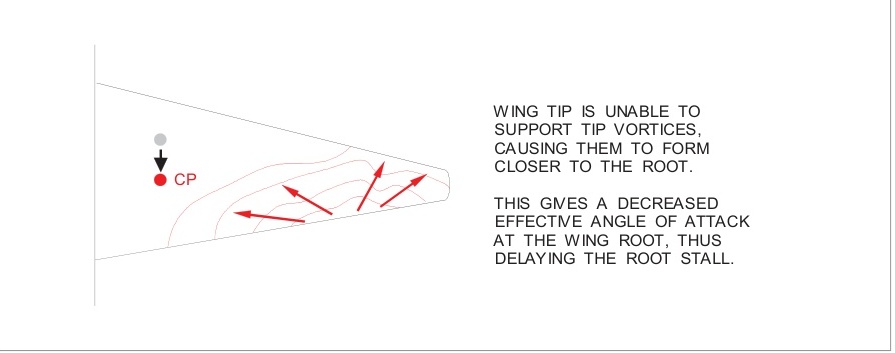
锥形机翼
图7.10。分离倾向于首先发生在机翼尖区域,减少这些区域的升力。如果允许实际机翼以这种方式失速,失速将给副翼带来抖振,也许还会导致剧烈的机翼下沉。(失速时的机翼下沉增加了飞机进入螺旋的倾向)。尾部不会有抖振,没有强烈的机头向下俯冲力矩,几乎没有,如果有的话,副翼有效性。为了提供有利的失速特性,锥形机翼必须使用以下一种或多种方法进行修改:
-
几何扭转(外洗),从根部到翼尖的入射角减小。这减小了翼尖处的攻角,根部将倾向于首先失速。
-
翼型剖面可能在整个跨度上变化,使得更大厚度和弯度的剖面位于翼尖附近。这种剖面更高的 C LMAX \mathrm{C}_{\text{LMAX}} CLMAX延迟失速,使根部倾向于首先失速。
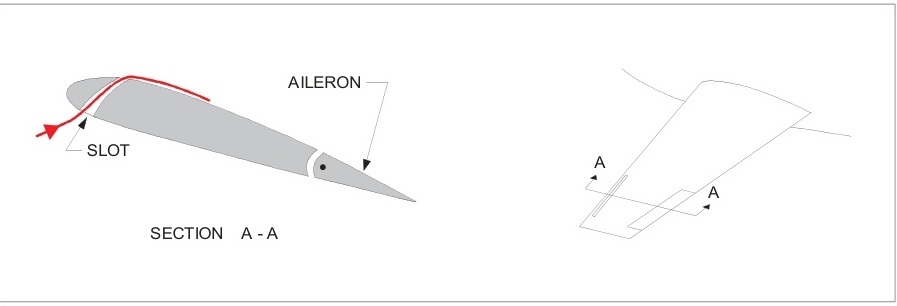
- 前缘缝翼,图7.11,位于翼尖附近,重新激活(增加)边界层的动能。它们增加局部 C LMAX \mathrm{C}_{\text{LMAX}} CLMAX,对于延迟翼尖分离和保持副翼有效性都很有用。缝翼和缝道的功能将在第8章中详细描述。
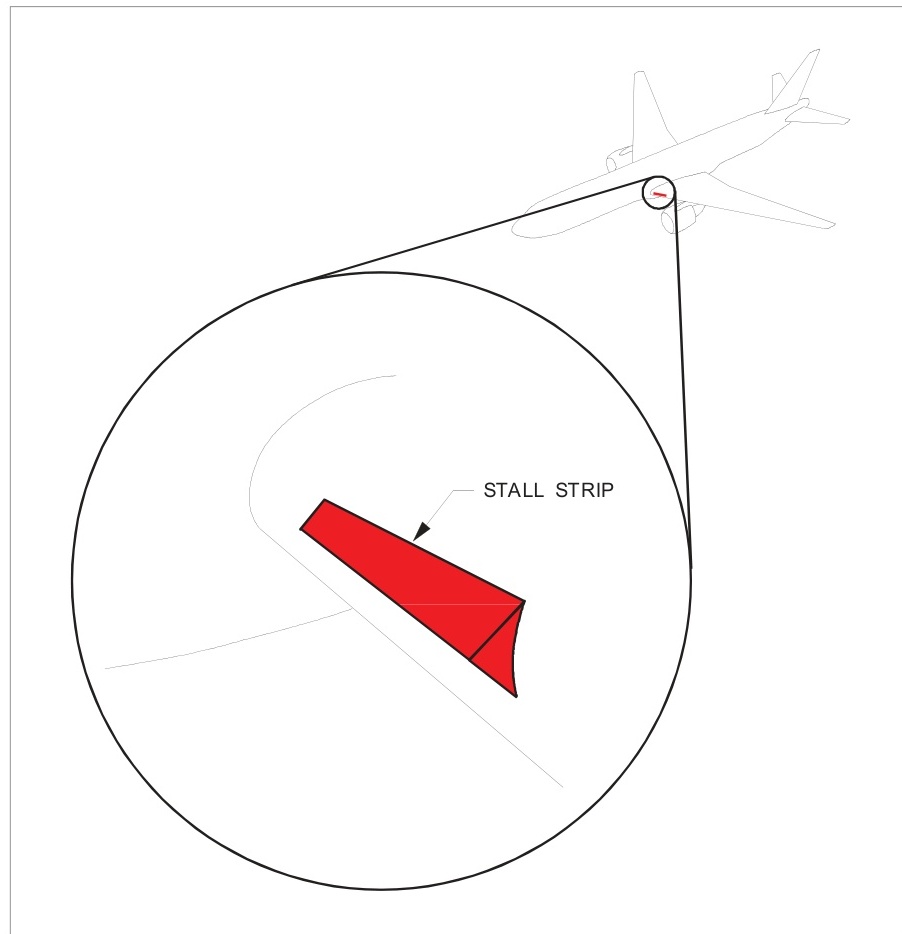
- 改善失速模式的另一种方法是强制从根部开始失速。在根部使用前缘半径较小的翼型剖面会促使气流在较低攻角下分离,但会降低整体机翼效率。同样的效果可以通过在机翼前缘安装失速条(小三角形条带),图7.12,来实现。
在较高攻角下,失速条会促进分离,但不会影响巡航时机翼的效率。
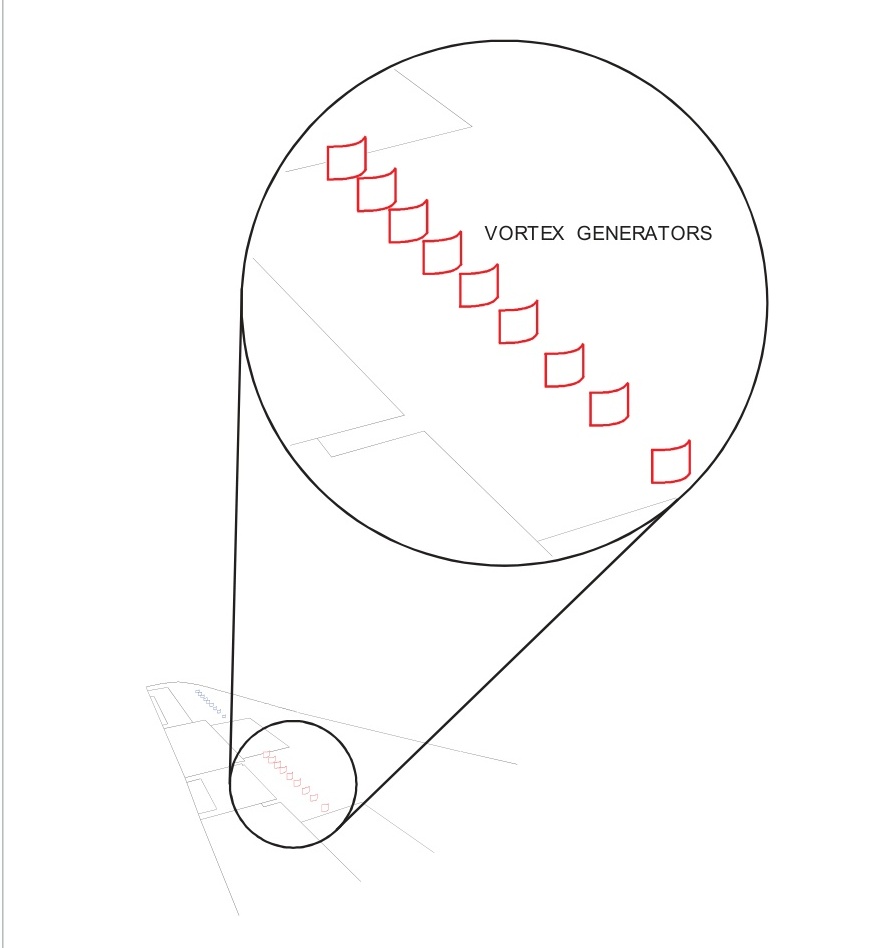
- 涡流发生器,图7.13,是一排小型、薄的翼型形状的叶片,垂直(约2.5厘米)伸入气流中。它们各自产生一个小涡流,使高能量的自由流与边界层混合并增加其动能。这重新激活边界层并倾向于延迟分离。
后掠
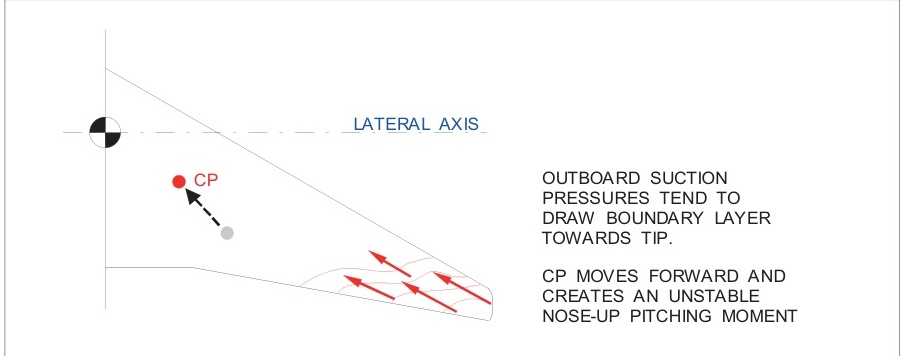
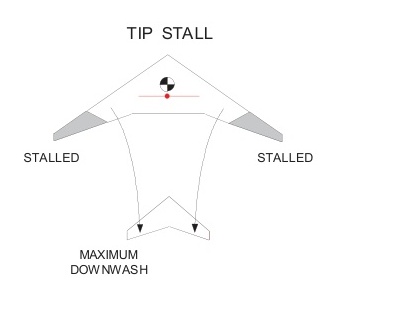
图7.14。后掠翼的设计是为了允许更高的最大速度,但它增加了翼尖附近首先失速的倾向。翼尖处升力的损失使压力中心向前移动,产生机头上仰力矩。
有效的升力产生集中在内侧,最大下洗现在影响尾翼,图7.15,增加了机头上仰力矩。
俯仰上仰
一旦后掠翼开始失速,压力中心向前移动和尾翼处增加的下洗都会导致飞机机头迅速上升,进一步增加攻角。这是一种非常不理想且不可接受的失速响应,可能导致俯仰控制完全丧失,从中恢复可能非常困难,甚至不可能。这种现象被称为俯仰上仰,是许多高速、后掠翼飞机的一种非常危险的特性。
后掠翼倾向于翼尖失速是由于边界层从根部到翼尖的展向流动。以下设计特点可以纳入,以最小化这种影响并使后掠翼飞机具有更可接受的失速特性:
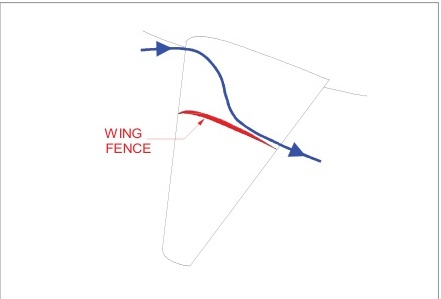
机翼栅栏(边界层栅栏),图7.16,是薄金属栅栏,通常从前缘延伸到后缘,位于上表面,旨在防止边界层向外漂移。
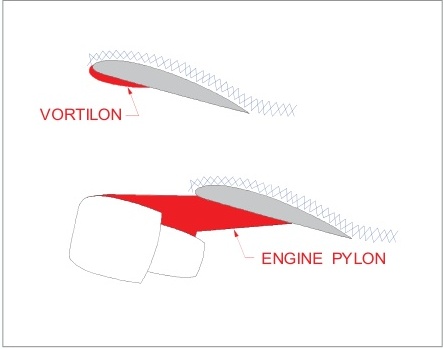
涡流栅,图7.17,也是薄金属栅栏,但比完整的弦向栅栏小。它们位于机翼前缘的下侧。机翼上安装的发动机吊舱的支撑塔架也以同样的方式起作用。在高攻角下,一个小但强烈的涡流在机翼上表面产生,起到空气动力学机翼栅栏的作用。
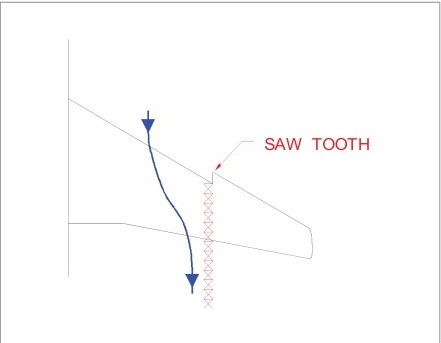
锯齿状前缘,图7.18,在高攻角下也会在机翼上表面产生强烈的涡流,最小化边界层的展向流动。(在现代高速喷气式运输机上很少使用)。
关键要点 1
自学
以下四页包含一个复习辅助工具,旨在鼓励学生熟悉任何新术语,以及"失速"的关键要素。
在这些陈述中填入缺失的词语,参考前面的段落。
失速涉及到________的损失和_________的损失。
飞行员必须能够清晰明确地_________失速。
失速是由气流_________引起的。
分离可能发生在边界层缺乏足够的_________能量或__________________梯度变得过大时。
不利压力梯度随着_________角度的增加而增加。
失速发生时的攻角的其他名称是_________角和_________攻角。
失速发生时的升力系数是_________。
失速可以在任何_________或飞行_________下发生。
典型的失速角约为_________°。
要从失速中恢复,_________ 角必须_________。
在失速恢复过程中使用最大功率以最小化_________损失。
在小型飞机上,应使用_________来防止机翼在失速时_________。
在后掠翼飞机上,应使用_________来防止机翼在失速时_________。
通过适度的_________压力在_________控制上恢复失速过程中损失的高度。
失速的最初迹象可能是_________飞行控制,失速_________装置或空气动力学_________。
在接近失速的速度下,必须谨慎使用_________来_________下沉的机翼。
可接受的失速指示是:
(1) 无法轻易阻止的机头_________俯仰。
(2) 严重的_________。
(3) 俯仰控制达到_________止动点,并且不再发生_________姿态的增加。
参考失速速度 ( V S R ) \left(V_{SR}\right) (VSR)是由__________________定义的校准空速。
V S R V_{SR} VSR不得_________于_________失速速度。
当安装了在选定的__________________角度时突然推动_________的装置时, V S R V_{SR} VSR不得_________于该装置操作时速度之上_________节或_________%,以_________者为准。
在直线和转弯飞行中,必须向飞行员提供具有足够_________以防止意外失速的失速警告,且该警告必须_________和_________。
可接受的失速警告可能包括飞机固有的_________特性或在预期飞行条件下提供明显区分指示的_________。
失速警告必须在超过失速速度不少于_________节或_________%校准空速(以较大者为准)的速度下开始。
小型飞机上的人工失速警告通常由_________或_________给出。
大型飞机上的人工失速警告通常由_________抖动器给出,结合_________和噪音发生器。
人工失速警告装置可以通过_________开关、_________叶片或攻角_________激活。
大多数攻角传感器计算攻角的_________变化率,以在加速接近失速时提供_________警告。
EASA要求的失速特性,直到飞机失速时为止,包括:
a. 必须能够通过不反向使用_________和_________产生和纠正_________。
b. 不得出现异常的机头上仰_________。
c. 纵向控制力必须_________。
d. 必须能够通过正常使用_________迅速防止_________并从失速中恢复。
e. 在失速和完成恢复之间不应有过度的_________。
f. 对于转弯飞行失速,失速后飞机的动作不得过于_________或_________,以至于使用正常的驾驶_________难以迅速_________并重新获得对飞机的_________。
具有小前缘_________的翼型将在_________攻角失速,且失速将更加明显。
具有大厚弦比的翼型将在_________攻角失速,且失速将更加平缓。
在__________________附近有弯度的翼型将在更高的攻角失速。
矩形机翼平面形状将倾向于首先在_________失速。
矩形机翼平面形状通常具有理想的失速特性;这些特性是:
a. 在失速时副翼_________。
b. 在失速时机头_________。
c. 在失速时具有空气动力学_________。
d. 在失速时没有剧烈的机翼_________。
为了使锥形平面形状的机翼具有所需的失速特性,设计中可以包含以下装置:
a. _________(从根部到翼尖的入射角递减)。
b. 在翼尖处具有_________厚度和弯度的翼型。
c. 在翼尖处的前缘_________。
d. 安装在机翼内侧前缘的失速_________。
e. _________发生器,在翼尖处重新激活_________层。
后掠翼由于机翼上表面从根部到翼尖的边界层的展向流动而增加了翼尖失速的倾向。延迟后掠翼平面形状翼尖失速的方法有:
a. 机翼_________,通常从前缘延伸到后缘的薄金属栅栏,位于机翼上表面。
b. _________,也是薄金属栅栏,但较小,位于机翼前缘的下侧。
c. 锯齿状_________前缘,在高攻角时在机翼上表面产生涡流。
d. 吊舱式机翼发动机的发动机_________也起到涡流发生器的作用。
e. _________发生器也用于延迟后掠翼的翼尖失速。
后掠翼平面形状的翼尖失速使飞机在失速时有_________-_________的倾向。这是由于当机翼尖先失速时,_________向前移动所致。
关键要点1,连同单词插入可在第XXX页找到。
超失速(深度失速)
后掠翼倾向于首先在翼尖附近失速。由于翼尖位于重心后方较远处,翼尖处升力的损失导致俯仰姿态迅速增加,进一步增加攻角。图7.19。
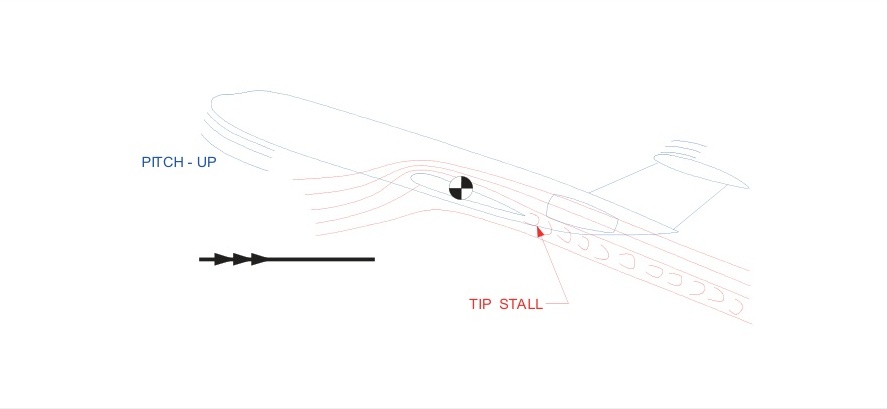
这种由俯仰上仰引起的攻角"自动"增加,使更多的机翼失速。阻力将迅速增加,升力将减少,飞机将开始以恒定的、机头高的俯仰姿态下沉。这导致攻角迅速额外增加,图7.20。
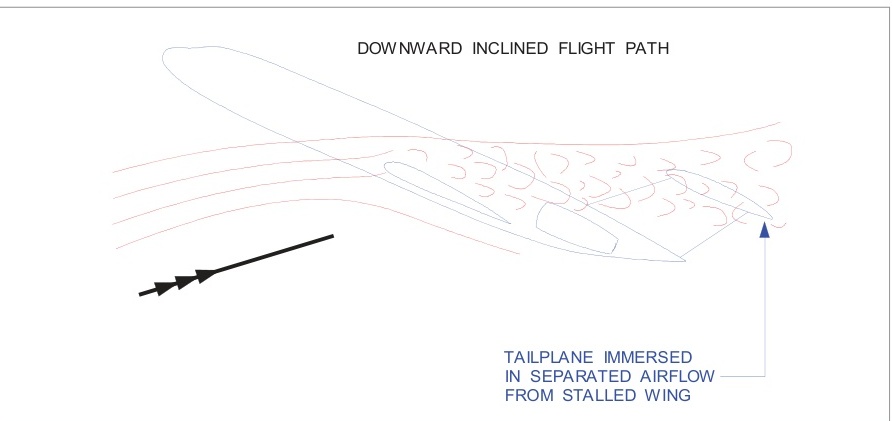
从失速机翼分离的气流将使高位尾翼浸没在低能量湍流空气中,图7.20。升降舵效能大大降低,使飞行员无法降低攻角。飞机将稳定在所谓的"超失速"或"深度失速"状态。
显然,后掠翼和高位尾翼('T’型尾翼)的组合是"超失速"或"深度失速"中涉及的因素。在这两者中:
已经证明,通过设计修改(机翼栅栏、涡流栅和锯齿状前缘)可以减少后掠翼的俯仰上仰倾向,这些修改最小化了边界层从根部到翼尖的展向流动。这些装置延迟翼尖失速。涡流发生器也经常用于后掠翼上,以延迟翼尖失速并改善失速特性。
也可以鼓励机翼根部首先失速。这可以通过修改根部的翼型剖面、安装失速条以及在机翼内侧安装效率较低的前缘襟翼(克鲁格襟翼)来实现。
DC-9、MD-80、Boeing 727、Fokker 28等飞机都有后掠翼和高位尾翼('T’型尾翼)。它们还有后部、机身安装的发动机。后部安装发动机的唯一贡献是,它们是设计师首先将尾翼放在垂直尾翼顶部的原因。就其本身而言,在后部机身上安装发动机并不会导致超失速。
超失速预防 - 推杆器
具有超失速特性的飞机设计必须安装一个装置,以防止它失速。这个装置是推杆器。一旦这样的飞机开始失速,就为时已晚;超失速的发展对人类来说太快,无法响应,而且飞机随后无法解除失速。
推杆器是一种连接到升降舵控制系统的装置,它在超失速发生前物理地向前推动控制杆,降低攻角。
推力通常约为80磅。这被认为足够有效,但在失控情况下不会太高而无法控制。在发生故障的情况下,提供了"卸载"推杆器系统的措施。一旦卸载,推杆器通常无法在飞行中重置。
一旦激活,当攻角降低到适当值以下时,推杆器将自动脱离。
影响失速速度的因素
第148页详细介绍了飞机失速的校准空速( V S R V_{SR} VSR)。我们知道失速是由超过临界攻角引起的。失速与飞机的速度无关;临界攻角可以在任何飞机速度下超过。然而,已经证明,如果飞机在平直飞行中以不超过每秒1节的速率减速,可以确定它失速的校准空速。正是基于这个参考失速速度( V S R V_{SR} VSR),建立了推荐的起飞、机动、进近和着陆速度,以在正常操作期间提供足够的失速裕度( 1.05 ∼ V s R 1.05\mathrm{\sim V}_{\mathrm{sR}} 1.05∼VsR, 1.1 ∼ V S R 1.1\mathrm{\sim V}_{\mathrm{SR}} 1.1∼VSR, 1.2 ∼ V S R 1.2\mathrm{\sim V}_{\mathrm{SR}} 1.2∼VSR, 1.3 V R 1.3V_{\mathrm{R}} 1.3VR等)。
影响 V s R V_{sR} VsR的因素有:
-
重量变化。
-
飞机机动(增加载荷系数)。
-
构型变化( C LMAX \mathrm{C}_{\text{LMAX}} CLMAX和俯仰力矩的变化)。
-
重心位置。
-
发动机推力和螺旋桨滑流。
-
马赫数。
-
机翼污染。
-
大雨。
1g失速速度
在平直飞行中,飞机的重量由升力平衡。
载荷系数 ( n ) 或 ′ g ′ = 升力 重量 \text{载荷系数}(n)\text{或}'g'=\frac{\text{升力}}{\text{重量}} 载荷系数(n)或′g′=重量升力
虽然(n)是载荷系数的正确符号,但升力与重量的关系多年来一直被俗称为’g’。(1g对应于我们日常生活中作用于我们的力)。如果产生的升力大于重量,载荷系数或’g’将大于一;作用于飞机及其中的一切,包括飞行员的力将更大。
如果升力 = 重量,载荷系数将为一,从升力公式:
L = 1 / 2 ρ V 2 C L S \mathrm{L}=1/2\rho\mathrm{V}^{2}\mathrm{C}_{\mathrm{L}}\mathrm{S} L=1/2ρV2CLS
可以看出,当公式中的其他因素变化时,升力将变化。我们认为密度(ρ)和机翼面积(S)在此例中是恒定的。如果发动机减速,阻力将减少速度 ( V ) (V) (V),从公式中可以看出,升力将减少。为了保持升力恒定并在减速时维持1g飞行,必须通过增加攻角来增加 C L C_{L} CL。
任何进一步的速度减少都需要进一步增加攻角,每个较低的校准空速对应于更大的攻角。最终,在某个校准空速下,机翼达到其失速角 ( C LMAX ) \left(C_{\text{LMAX}}\right) (CLMAX),超过该角度,任何试图通过增加攻角来维持升力的尝试都将导致失速。我们可以转换升力公式来显示这种关系:
V s1g = 1 1 / 2 ρ C LMAX S V_\text{s1g}= \sqrt{\frac{1}{1/2 \rho C_\text{LMAX} S}} Vs1g=1/2ρCLMAXS1
重量变化对失速速度的影响
在1g飞行的 C LMAX \mathrm{C}_{\text{LMAX}} CLMAX下,重量变化需要升力变化,从 V s 1 g V_{s1g} Vs1g公式可以看出,例如,重量(升力)增加将增加 V s 1 g V_{s1g} Vs1g。
两种不同重量下的基本失速速度之间的关系可以从以下公式获得:
V s1g new = V s1g old new weight old weight V_\text{s1g new} = V_\text{s1g old} \sqrt{\frac{\text{new weight}}{\text{old weight}}} Vs1g new=Vs1g oldold weightnew weight
失速发生的攻角不会受到重量的影响。(前提是 C LMAX \mathrm{C}_{\text{LMAX}} CLMAX的适当值不受速度影响 - 在大于M0.4的速度下会受到影响,见第177页XXX)。要在水平飞行中保持给定的攻角,如果重量改变,必须改变动压(校准空速)。
例如:在588 600 N重量下,飞机在150节校准空速下失速。在470 880 N重量下的 V s 1 g 失速 V_{s1g}\text{失速} Vs1g失速速度是多少?
V s1g new = 150 470880 588600 V_\text{s1g new} = 150 \sqrt{\frac{470880}{588600}} Vs1g new=150588600470880
应该注意的是,重量减少20%导致失速速度大约减少10%。(作为"经验法则",这种关系可以用来节省计算器电池,以及考试中的时间!)。由于重量增加导致的失速速度变化可以用同样的方式计算。
力的分解与合成
力是一个矢量量。它有大小和方向,可以用一条通过其施加点的直线表示,其长度表示力的大小,其方向对应于力作用的方向。
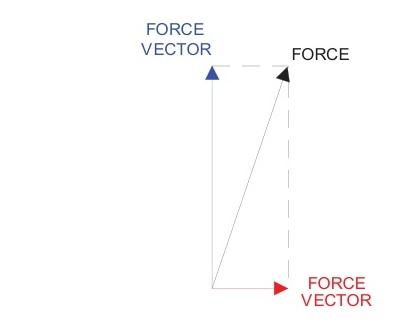
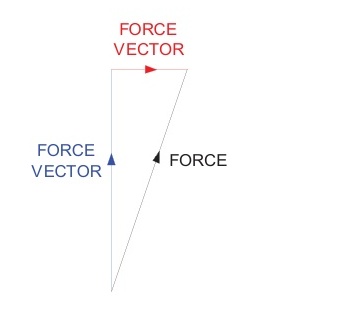
作为矢量量,力可以相加或相减形成合力,或者可以通过简单的绘制表示它们的矢量过程分解 - 分解成两个或更多的分量。图7.21。
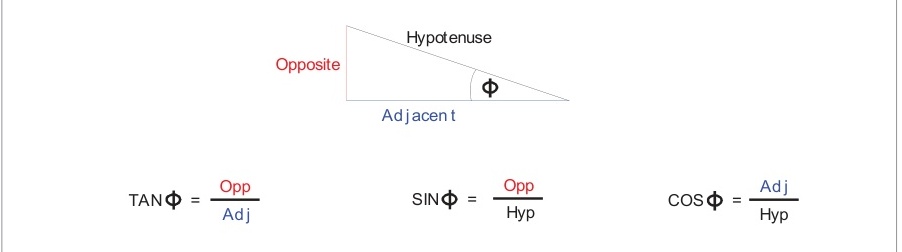
使用三角函数分解力
如果已知直角三角形的一个角和一边的长度,可以使用三角函数计算其他边的长度。这种技术用于将力分解为其水平和垂直分量。
水平转弯中的升力增加
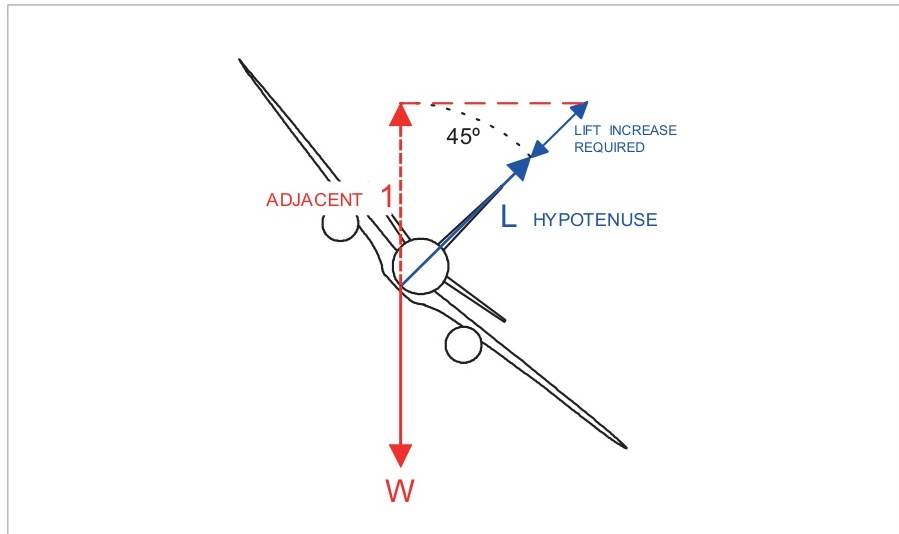
图7.23显示了一架飞机在水平 4 5 ∘ 45^{\circ} 45∘倾斜转弯中。重量始终垂直向下作用。为了保持高度,向上力必须与向下力相同。升力从水平方向倾斜 4 5 ∘ 45^{\circ} 45∘,可以分解为两个分量或矢量:一个垂直和一个水平。从图示中可以看出,在水平转弯中,必须增加升力以产生等于重量的向上力矢量。我们知道垂直力必须等于重量,所以垂直力可以表示为1。使用三角函数可以找到垂直力与升力之间的关系,其中 Φ Φ Φ(phi)是倾斜角:
cos φ = A D J ( 1 ) H Y P ( ∼ L ) \cos φ=\frac{\mathrm{ADJ}(1)}{\mathrm{HYP}(\mathrm{\sim L})} cosφ=HYP(∼L)ADJ(1),转换这个公式得到, L = 1 cos φ L=\frac{1}{\cos φ} L=cosφ1
在这种情况下 φ = 45 φ=45 φ=45度
L = 1 0.707 = 1.41 L=\frac{1}{0.707}=1.41 L=0.7071=1.41
这表明:
在 4 5 ∘ 45^{\circ} 45∘倾斜中,升力必须比重量大1.41倍
另一种说法是:在水平 4 5 ∘ 45^{\circ} 45∘倾斜转弯中,升力必须增加41%。
载荷系数对失速速度的影响
已经证明,要倾斜飞机并保持高度,升力必须大于重量。而且在转弯中的额外升力是通过增加攻角获得的。为了考虑升力与重量之间的关系,我们使用载荷系数。
载荷系数(n)或’g’ = 升力 重量 \text{载荷系数(n)或'g'} = \frac{\text{升力}}{\text{重量}} 载荷系数(n)或’g’=重量升力
(a) 在转弯中增加升力,增加载荷系数。
(b) 随着倾斜角增加,载荷系数增加。
在 C LMAX \mathrm{C}_{\text{LMAX}} CLMAX的平直飞行中,不可能转弯并保持高度。试图增加升力会使飞机失速。如果在高于失速速度的指示空速下开始转弯,在某个倾斜角度, C L C_{L} CL将达到其最大值,飞机将在高于1g失速速度的速度下失速。
水平转弯中的升力增加仅是倾斜角的函数。使用以下公式,可以计算失速速度作为倾斜角或载荷系数的函数。 V s t V_{st} Vst是转弯中的失速速度
V s t = V s 1 cos ϕ V_{\mathrm{st}}=V_{\mathrm{s}} \sqrt{\frac{1}{\cos \phi}} Vst=Vscosϕ1
使用我们的示例飞机:1g失速速度为150节校准空速,那么在 4 5 ∘ 45^{\circ} 45∘倾斜中的失速速度将是多少?
V st = 150 1 0.707 = 178 节校准空速 V_\text{st} = 150 \sqrt{\frac{1}{0.707}} = 178 \text{ 节校准空速} Vst=1500.7071=178 节校准空速
在 6 0 ∘ 60^{\circ} 60∘倾斜中的失速速度将是:
V st = 150 1 0.5 = 212 节校准空速 V_\text{st} = 150 \sqrt{\frac{1}{0.5}} = 212 \text{ 节校准空速} Vst=1500.51=212 节校准空速
在 4 5 ∘ 45^{\circ} 45∘倾斜中的失速速度比 V s 1 g V_{s1g} Vs1g大19%,而在 6 0 ∘ 60^{\circ} 60∘倾斜中的失速速度比 V s 1 g V_{s1g} Vs1g大41%,由于这些是比率,对任何飞机都适用。
随着倾斜角的增加,失速速度将以递增的速率增加。在起飞和着陆期间特别是在高 C L C_{L} CL下运行时,应只使用适度的倾斜角来操纵飞机。对于现代高速喷气式运输机,服役中应使用的最大倾斜角为 3 0 ∘ 30^{\circ} 30∘(紧急机动除外)。正常最大值为 2 5 ∘ 25^{\circ} 25∘,但在较高高度,正常最大值为 1 0 ∘ 10^{\circ} 10∘至 1 5 ∘ 15^{\circ} 15∘。
如果1g失速速度为 150 k t 150kt 150kt,计算在 2 5 ∘ 25^{\circ} 25∘和 3 0 ∘ 30^{\circ} 30∘倾斜转弯中的失速速度。(答案见第191页XXX)。
如果在 1 5 ∘ 15^{\circ} 15∘倾斜转弯中的失速速度为153节校准空速,需要计算在 4 5 ∘ 45^{\circ} 45∘倾斜转弯中的失速速度,你需要先计算1g失速速度,如下:
V s t = V s1g 1 cos 15 ° V_{\mathrm {st}}=V_\text{s1g} \sqrt{\frac{1}{\cos 15°}} Vst=Vs1gcos15°1
↓ \downarrow ↓
V s 1 g = 153 1.02 = 150 节校准空速 V_{s1g}=\frac {153}{1.02}=150 \text{ 节校准空速} Vs1g=1.02153=150 节校准空速
高升力装置对失速速度的影响
现代高速喷气式运输机具有后掠翼,相对较低的厚度/弦比(例如,A310为 12 % 12\% 12%)。这些机翼的 C L M A X \mathrm {C}_{\mathrm {LMAX}} CLMAX整体值相当低,干净构型下的失速速度相应较高。为了降低着陆和起飞速度,使用各种装置来增加 C L M A X \mathrm {C}_{\mathrm {LMAX}} CLMAX的可用值。除了降低失速速度外,这些高升力装置通常会改变失速特性。这些装置包括:
a) 前缘襟翼和缝翼
b) 后缘襟翼
从1g失速公式: V s1g = L 1 / 2 ρ C L M A X S V_\text{s1g} = \sqrt{\frac {\mathrm {L}}{1/2ρ C_{\mathrm {LMAX}} S}} Vs1g=1/2ρCLMAXSL
可以看出, C LMAX \mathrm {C}_{\text {LMAX}} CLMAX的增加将降低失速速度。使用最现代的高升力装置,可以将 C LMAX \mathrm {C}_{\text {LMAX}} CLMAX增加多达 100 % 100\% 100%。高升力装置将在第8章中详细描述。高升力装置降低失速速度,从而降低最小飞行速度,提供更短的起飞和着陆距离 - 这是它们的唯一目的。
重心位置对失速速度的影响
CS-25.103(b)规定, V C L M A X V_{\mathrm {CLMAX}} VCLMAX是在导致参考失速速度最高值的重心位置下确定的。
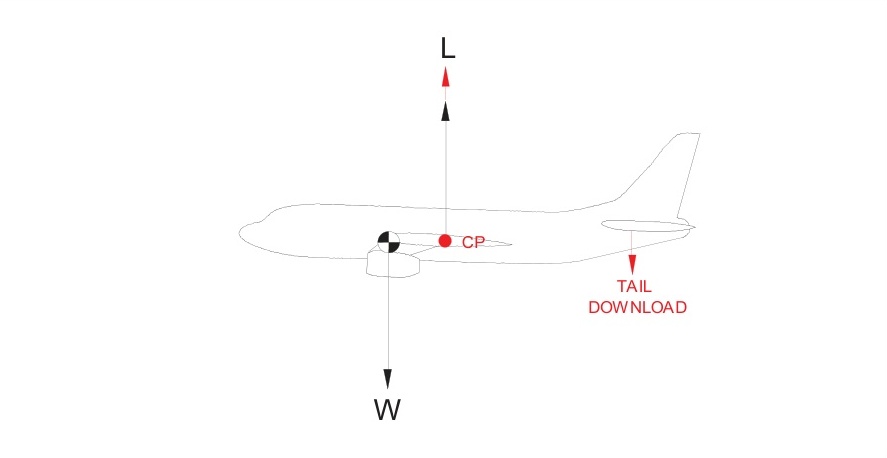
如果重心在压力中心前面,如图7.24所示,产生向下的俯仰力矩,且没有推力/阻力力矩与之对抗,尾翼必须提供向下的载荷以保持平衡。必须增加升力以保持向上力等于增加的向下力。从1g失速公式可以看出, C LMAX \mathrm {C}_{\text {LMAX}} CLMAX将被更多次地除入增加的升力。
V s1g = L 1 / 2 ρ C L MAX S V_\text{s1g} = \sqrt{\frac {{L}}{1/2ρ C_{\text{L MAX}} S}} Vs1g=1/2ρCL MAXSL
起落架对失速速度的影响
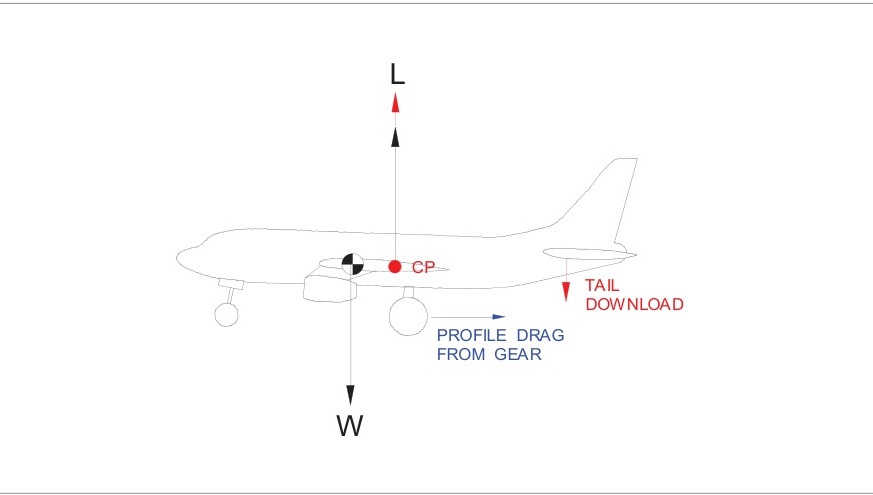
从图7.25可以看出,放下起落架时,重心下方的型阻增加。这将产生向下的俯仰力矩,必须通过增加尾部向下载荷来平衡。必须增加升力以平衡增加的向下力。
由于起落架伸出方向导致的重心移动对失速速度的影响微不足道。影响更大的是放下起落架时增加的型阻。
发动机功率对失速速度的影响
CS-25.103(bb)规定, V CLMAX V_{\text {CLMAX}} VCLMAX是在失速速度下零推力时确定的。
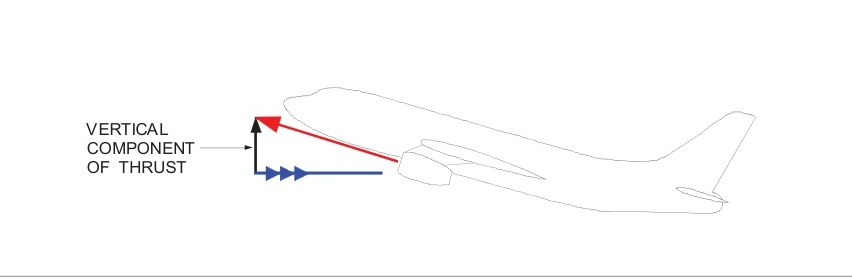
在确定 V CLMAX \mathrm {V}_{\text {CLMAX}} VCLMAX时,发动机必须处于零推力状态,并假设飞机重量完全由升力支撑。如果在接近失速时施加推力,飞机的高机头姿态会产生推力的垂直分量,如图7.27所示,这有助于支撑重量,需要的升力更少。带螺旋桨的飞机会有螺旋桨滑流产生的额外效应。
影响这种关系的最重要因素是发动机类型(螺旋桨或喷气式)、推重比以及在 C LMAX \mathrm {C}_{\text {LMAX}} CLMAX时推力矢量的倾角。
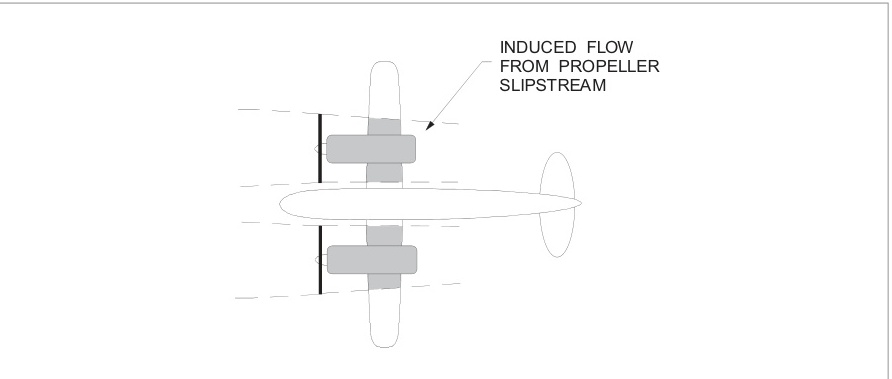
螺旋桨
图7.26。螺旋桨后的滑流速度大于自由流速度,取决于产生的推力。因此,当螺旋桨飞机处于低空速和高功率时,螺旋桨滑流内的动压远大于外部动压,这产生的升力比零推力时大得多。在给定的攻角和空速下,飞机的升力将受到很大影响。如果飞机处于着陆拉平阶段,突然减小功率将导致升力显著减少,可能导致重着陆。另一方面,通过适当地"轰"发动机,可以避免潜在的重着陆。
喷气式
典型的喷气式飞机不会经历螺旋桨驱动飞机中遇到的诱导流速度,因此唯一显著的因素是推力的垂直分量,如图7.27所示。由于这个垂直分量有助于支撑飞机重量,保持飞机飞行所需的空气动力升力更少。如果推力很大,并且在最大升力角度给予很大的倾角,对失速速度的影响可能非常大。由于喷气式发动机几乎没有诱导流,无论是否使用功率,失速时的攻角基本相同。
使用功率时的失速速度低于不使用功率时。这在第15章研究风切变时将被证明是重要的。
马赫数(可压缩性)对失速速度的影响
当飞机飞行速度更快时,机翼周围的流线模式会发生变化。在速度超过声速的四成( M 0.4 M0.4 M0.4)时,这些变化开始变得显著。这种现象被称为可压缩性。这将在第13章中详细讨论。
由机翼穿过空气产生的压力波以声速在机翼前方传播。这些压力波将机翼前方的空气向上引导至机翼上表面的低压区。
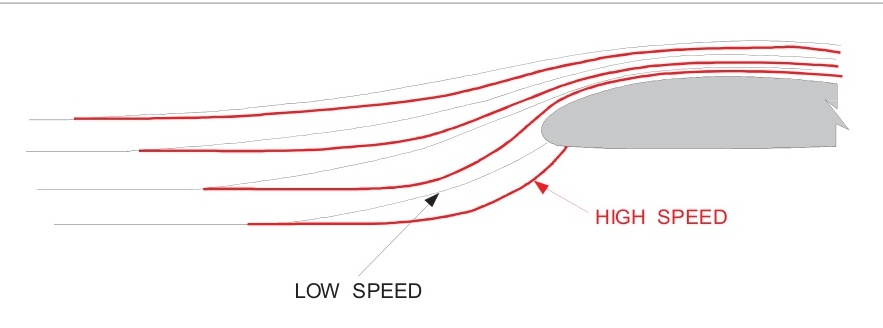
图7.28显示,在低速时,流线模式在机翼前方很远处就受到影响,空气有一定距离可以向上流动。随着速度增加,机翼越来越接近其前导压力波,流线模式在前方较短距离内受到影响,因此必须以更陡的角度接近机翼。
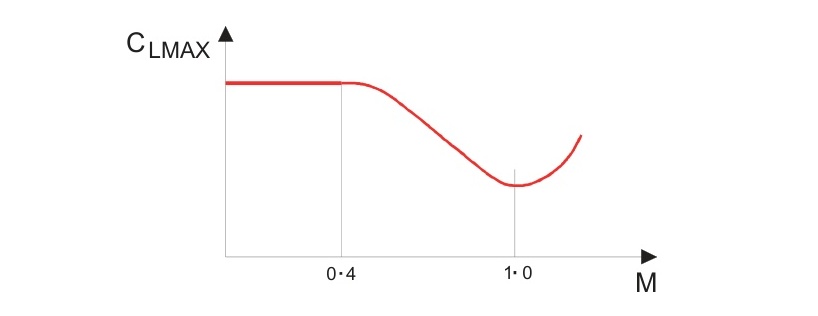
流线模式的这种变化加剧了前缘附近的不利压力梯度,导致在较小的攻角下发生气流分离。在M0.4以上, C LMAX C_\text{LMAX} CLMAX减小,如图7.29所示。
参考1g失速速度公式:
V s1g = L 1 / 2 ρ C L MAX S V_\text{s1g} = \sqrt{\frac {{L}}{1/2ρ C_{\text{L MAX}} S}} Vs1g=1/2ρCL MAXSL
如果 C LMAX {C}_{\text{LMAX}} CLMAX减小, V s1g V_\text{s1g} Vs1g将增加。
随着高度增加,要保持恒定的EAS,TAS会增加。此外,外部空气温度随高度增加而降低,导致当地声速降低。马赫数与TAS成正比,与当地声速(a)成反比:
M = TAS a M=\frac {\text{TAS}}{a} M=aTAS
因此,在恒定EAS下,随着高度增加,马赫数将增加。
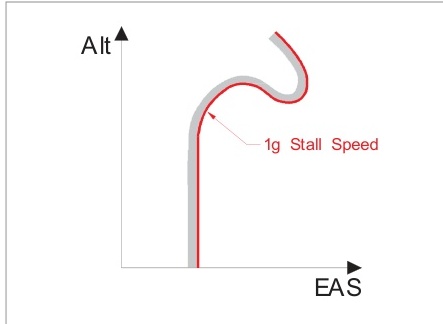
图7.30显示了在恒定载荷系数(n)下失速速度随高度的变化。这种曲线被称为给定载荷系数的失速边界,其中高度对等效空速作图。在这个载荷系数(1g)下,飞机不能在此边界左侧的速度下飞行。很明显,在较低高度范围内,失速速度不随高度变化。这是因为在这些低高度, V V_{} V处的马赫数小于 M 0.4 M0.4 M0.4,太低而无法产生可压缩性效应。最终(约30000英尺), V s V_{s} Vs处的马赫数随高度增加到足以使这些效应变得重要,失速速度随高度增加的现象变得明显。
使用前面的示例飞机, V s 1 V_{s1} Vs1为 150 k t 150kt 150kt,在约29000英尺高度使用ISA值时等于 M 0.4 M0.4 M0.4。
机翼污染对失速速度的影响
参考:
AIC 106/2004 “飞机上的霜冻、冰和雪”,以及
AIC 98/1999 “涡轮螺旋桨和其他螺旋桨驱动飞机:冰引起的失速”。
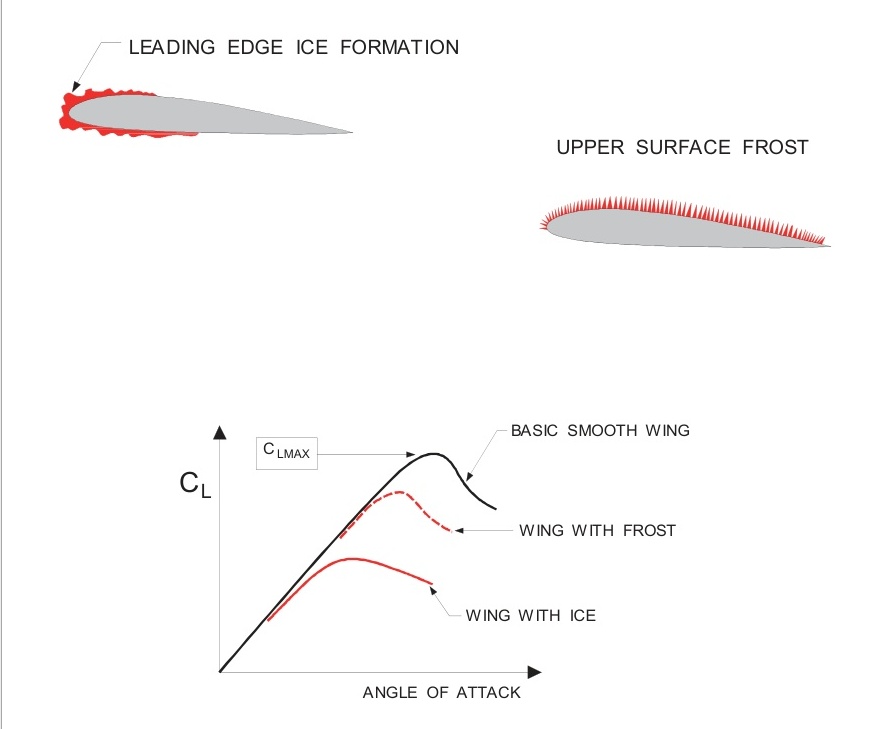
机翼上的任何污染,尤其是冰、霜或雪,都会极大地改变空气动力学轮廓并影响边界层的性质。
| 冰 | 机翼前缘形成的冰将产生: |
| a) 局部轮廓的大幅变化,导致严重的局部不利压力梯度。 | |
| b) 高表面摩擦和边界层动能的显著减少。 | |
| 这些导致 C LMAX \mathrm {C}_{\text {LMAX}} CLMAX大幅减小,在攻角不变的情况下可能使失速速度增加约 30 % 30\% 30%。 | |
| 冰的额外重量也会增加失速速度,但主要因素是 C LMAX \mathrm {C}_{\text {LMAX}} CLMAX的减少。 | |
| 霜冻 | 霜冻的影响更为微妙。机翼上表面积累的硬霜层会产生相当粗糙的表面纹理。 |
| 测试表明,机翼前缘和上表面的冰、雪或霜,其厚度和表面粗糙度类似于中等或粗砂纸,可以减少高达 30 % 30\% 30%的升力(失速速度增加 10 % 10\% 10%至 15 % 15\% 15%)并增加 40 % 40\% 40%的阻力。 | |
| 虽然基本形状和空气动力学轮廓没有变化,但表面粗糙度的增加增加了皮肤摩擦并减少了边界层的动能。分离将在低于干净光滑机翼的攻角和升力系数下发生。 | |
| 雪 | 雪的影响可能类似于霜冻,因为它会增加表面粗糙度。如果飞机上有一层雪,必须在飞行前清除。雪本身不仅会增加皮肤摩擦阻力,还可能掩盖机身结冰。雪在滑行或起飞过程中不会被吹走。 |
机长在法律上必须确保飞机在起飞时空气动力学上是干净的。了解应用于机身的任何除冰或防冰液的有效时间非常重要。如果在起飞前超过这个时间,必须再次处理飞机。
虽然由霜冻形成导致的 C LMAX \mathrm {C}_{\text {LMAX}} CLMAX减少通常不如冰形成导致的那么大,但它通常是意外的,因为人们可能认为只有空气动力学形状的大变化(如冰导致的)才会减少 C LMAX \mathrm {C}_{\text {LMAX}} CLMAX。然而,边界层的动能是影响气流分离的重要因素,这种能量会因表面粗糙度的增加而减少。图7.31的插图典型地说明了冰和霜形成对 C LMAX \mathrm {C}_{\text {LMAX}} CLMAX的一般影响。
由冰形成导致的失速速度增加不容易量化,因为冰的积累和形状是无法预测的。即使是少量的冰也太多了。在飞行中绝不能允许冰或霜留在任何空气动力学表面上,也不能允许冰、霜、雪或其他污染物在飞行前留在飞机上。
对飞行员关于冰引起的失速的警告
最近有一些案例涉及在结冰条件下失去控制,原因是在明显高于正常失速速度的情况下未检测到失速,伴随着剧烈的滚转振荡。
由于冰引起的失速,飞机的控制可能会丧失,其开始可能非常隐蔽*,难以察觉。
关于识别和从隐蔽的冰引起的机翼失速中恢复的建议如下:
a) 在结冰条件下性能损失可能表明机身结冰严重积累(即使看不见),这会导致升力逐渐损失和阻力显著增加;
b) 这种冰的积累可能导致飞机在比正常失速速度高约30%的速度下失速;
c) 冰引起的机翼失速的纵向特性可能非常温和,以至于飞行员可能不知道它已经发生;
d) 飞机上安装的失速警告系统可能不会提醒飞行员注意隐蔽的冰引起的机翼失速(攻角将低于触发开关所需的攻角),因此不应依赖它来警告这种情况。然而,机身抖动可能有助于识别机翼失速的开始;
e) 第一个线索可能是滚转控制问题。这可能表现为逐渐增加的滚转振荡或剧烈的机翼下垂;
f) 滚转振荡和高阻力的开始结合可能导致飞机进入高下降率,除非采取迅速的恢复措施;
g) 如果在结冰条件下出现滚转控制问题,飞行员应怀疑飞机已进入冰引起的机翼失速,并应立即采取失速恢复措施(减小攻角)。还应激活除冰系统。如果飞机配备了防冰系统,应根据飞行手册/操作手册的程序和建议,在进入结冰条件前激活。如果防冰系统尚未使用,则应立即激活。还应考虑通过调整航迹和/或高度(如果可能)离开结冰条件。
由冰引起的稳定器失速
尾翼是一个翼型,由于它比机翼薄,可能在机翼之前经历结冰。效果将与机翼相同;失速将在较低的攻角下发生。尾翼通常在负攻角下运行,产生向下的载荷,因此如果尾翼失速并且失去向下的载荷,飞机的机头将下降,纵向控制将丧失。
冰污染的尾翼失速可能由机翼襟翼的放下而引发。放下襟翼增加了下洗,这增加了尾翼的负攻角。如果尾翼有冰污染,这可能足以导致它失速。在这种情况下的恢复程序是再次收回襟翼,从而减少下洗。
大雨对失速速度的影响
重量
大雨会在飞机上形成一层水膜,略微增加其重量,可能高达 1 − 2 % 1-2\% 1−2%,这本身就会增加失速速度。
空气动力学效应
水膜会扭曲翼型,使表面变粗糙,并改变整个飞机上的气流模式。 C LMAX \mathrm {C}_{\text {LMAX}} CLMAX将减小,导致失速速度增加。
阻力
水膜将增加干扰阻力、型阻和形阻。在小雨中,阻力可能增加 5 % 5\% 5%,在中雨中增加 20 % 20\% 20%,在大雨中增加高达 30 % 30\% 30%。这显然增加了所需的推力。
冲击
另一个考虑因素,虽然不影响失速速度,是大雨对飞机的冲击效应。动量将损失,空速将减小,需要增加推力。同时,大雨也会将飞机向下推。任何给定情况下的雨量会有所不同,但在最后进近阶段突然进入倾盆大雨的飞机将受到动量损失和高度减少的影响,类似于微下击暴流风切变的效应。(第15章)。
鸭式布局的失速和恢复特性
在传统的后尾翼配置中,机翼在尾翼之前失速,在失速时保持纵向控制和稳定性。在鸭式布局中,如果机翼先失速,稳定性就会丧失,但如果前翼先失速,则控制就会丧失,C的最大值会降低。
螺旋
当飞机意外或故意失速时,飞机的运动在某些情况下可能发展成螺旋。螺旋的重要特征是:
a) 飞机沿着一条陡峭的螺旋路径围绕垂直螺旋轴下降,
b) 两个机翼的攻角都远高于失速角,
c) 飞机围绕垂直螺旋轴有高旋转率,
d) 从上方看,飞机围绕螺旋轴执行圆形路径,螺旋的半径通常小于机翼的半翼展,
e) 飞机在螺旋中可能处于"正立"或"倒立"位置。
螺旋是所有飞行机动中最复杂的之一。螺旋可以定义为导致自转的加剧失速,这意味着旋转是稳定的,如果没有干预,将由于空气动力学力而继续。在螺旋过程中,机翼保持不均匀失速。
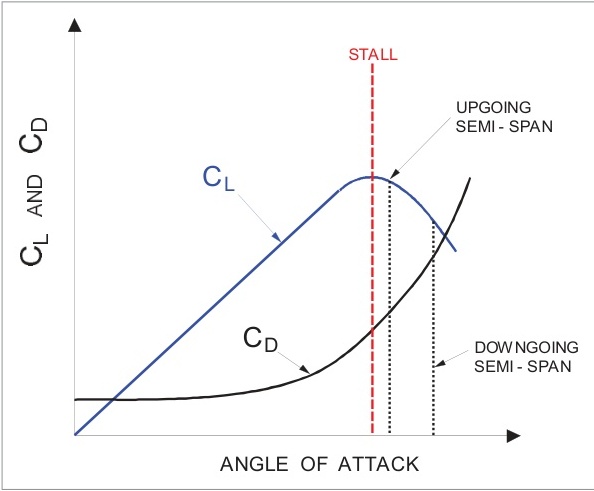
螺旋的主要原因
在螺旋发生前必须先发生失速。当一个机翼比另一个更严重失速时,就会发生螺旋,如图7.32所示。更严重失速的机翼将下垂,飞机的机头将向下垂的机翼方向偏航。
意外螺旋的原因是在执行机动时超过临界攻角,同时使用的方向舵输入过多或不足以配合使用的副翼(交叉控制)。如果不及时采取正确的失速恢复措施,失速可能发展成螺旋。
协调使用飞行控制很重要,特别是在低空速和高攻角飞行期间。虽然大多数飞行员能够在常规机动中保持协调飞行,但当出现分心时,这种能力往往会下降,他们的注意力在重要任务之间分散。导致问题的分心包括专注于驾驶舱内外的情况、机动避开其他飞机以及在起飞、爬升、进近或着陆期间机动避开障碍物。
如果飞机上的力以其他方式不平衡,也可能发展成螺旋,例如,由于多发飞机上的发动机故障引起的偏航力,或者如果重心因不平衡的燃油负载而横向位移。
螺旋的阶段
螺旋有三个阶段。
-
初始螺旋是第一阶段,从飞机失速和旋转开始到螺旋完全发展。
-
完全发展的螺旋存在于角速率、空速和垂直下降率从一个转弯到下一个转弯稳定的时间。
-
第三阶段,螺旋恢复,始于反螺旋力克服促螺旋力时。
如果飞机接近临界攻角,并且一个机翼比另一个失去更多升力,那个机翼将下垂。其相对气流将向上倾斜,增加其有效攻角。当飞机围绕其重心滚转时,上升的机翼有较小的有效攻角,保持比另一个更少的失速状态。这种不平衡升力的情况随着飞机向低机翼偏航而增加,加速外侧高机翼并减慢内侧低机翼的速度。与任何失速一样,机头下垂,随着惯性力开始产生效应,螺旋通常稳定在稳定的旋转率和下降率。
至关重要的是,从意外螺旋中恢复应尽快开始,因为许多飞机不容易从完全发展的螺旋中恢复,而其他飞机在恢复输入生效前继续旋转数圈。从初始螺旋恢复通常比从完全发展的螺旋恢复需要更少的高度和时间。每架飞机的螺旋特性都不同,单个飞机的螺旋特性根据构型、载荷和其他因素而变化。
质量和平衡对螺旋的影响
飞机的总质量及其分布都影响飞机的螺旋特性。较高的质量通常意味着较慢的初始螺旋率,但随着螺旋的进行,螺旋率可能趋于增加。较高的角动量延长了重载飞机从螺旋中恢复所需的时间和高度。
重心位置更为重要,影响飞机对螺旋的抵抗力以及螺旋本身的所有阶段。
a) 重心向前限制移动使飞机更稳定,控制力将更高,这使得不太可能做出大的、突然的控制动作。当调整好后,如果释放控制,飞机将倾向于回到水平飞行,但失速速度将更高。
b) 重心向后限制移动会降低纵向静态稳定性并减小俯仰控制力,这使得飞机更容易失速。一旦进入螺旋,重心越靠后,螺旋姿态就越平坦。
c) 如果重心超出后限制,或者如果功率没有及时减小,螺旋更可能变平。平坦螺旋的特征是接近水平的俯仰和滚转姿态,螺旋轴靠近重心。虽然平坦螺旋中每转的高度损失可能比正常螺旋少,但极高的偏航率(通常超过每秒400°)导致高下降率。平坦螺旋中的相对气流几乎是直上的,使机翼保持在高攻角。更重要的是,尾部上方的上升气流可能使升降舵和方向舵失效,使恢复变得不可能。
螺旋恢复
从简单失速中恢复是通过减小攻角来实现的,这恢复了机翼上的气流;螺旋恢复还涉及停止旋转。螺旋的极其复杂的空气动力学可能要求不同飞机采用截然不同的恢复程序,因此不存在适用于所有飞机的通用螺旋恢复程序。
对于某些飞机,推荐的恢复程序只是将功率降至怠速并释放对控制的压力。在另一极端,某些飞机的设计使得从发展的螺旋中恢复需要明确的控制动作,精确地与旋转中的某些点同步,持续数圈。
以下是正立螺旋的一般恢复程序。始终参考所飞行的特定飞机的飞行手册,并遵循制造商的建议。
-
将油门调至怠速。这最小化高度损失并减少平坦螺旋发展的可能性。它还消除了多发飞机中可能的不对称推力。发动机扭矩和螺旋桨陀螺效应可能增加单发飞机的攻角或旋转率,加剧螺旋。
-
使副翼回中。副翼位置通常是平坦螺旋或正常螺旋中更高旋转率的促成因素。
-
施加全方向舵以对抗螺旋。螺旋方向最可靠地从转弯协调器确定。不要使用侧滑指示器中的球;其指示不可靠,可能受到其在驾驶舱内位置的影响。
-
将升降舵控制迅速移至大约中立位置。一些飞机仅需放松后压,而其他飞机则需要全前俯仰控制行程。
上述四项可以同时完成。
-
保持推荐的控制位置直到旋转停止。
-
当旋转停止时,使方向舵回中。如果在旋转停止后保持方向舵偏转,飞机可能会进入另一个方向的螺旋!
-
通过对俯仰控制施加渐进的后压,从随后的俯冲中恢复。
a) 拉得太猛可能触发二次失速,或超过极限载荷系数并损坏飞机结构。
b) 从俯冲中恢复太慢可能导致飞机超过其空速限制,特别是在空气动力学干净的飞机中。
在螺旋恢复期间关闭油门是避免恢复过程中速度过度增加的另一个原因。
c) 当恢复正常飞行时增加功率,注意遵守功率和转速限制。
失速的特殊现象
交叉控制失速
交叉控制失速可能发生在高攻角飞行时,同时施加与副翼相反方向的方向舵,或者在与副翼相同方向施加过多方向舵。这将通过侧滑指示器中的球偏离中立位置显示出来。
交叉控制失速可能几乎没有警告就发生;一个机翼将比另一个早得多失速,可能发生相当剧烈的机翼下垂。必须抵制用副翼阻止机翼下垂的"本能"反应。应始终使用方向舵保持飞机平衡、协调的飞行(球在中间),特别是在低空速/高攻角时。
加速失速
加速失速是由突然或过度的控制动作引起的。加速失速可能发生在飞行路径突然变化期间,例如陡转弯或从俯冲中快速恢复。它被称为"加速失速",因为它发生在大于1g的载荷系数下。加速失速通常比1g失速更剧烈,而且由于相对较高的空速,往往是意外的。
二次失速
二次失速可能在尝试从失速中恢复时触发。这通常是由于试图加快失速恢复而发生:要么在失速警告时没有充分减小攻角,要么在尝试恢复失去的高度之前没有给飞机足够的时间开始再次飞行。在仍然施加全功率的情况下,放松后压并允许飞机飞行,然后再施加适度的后压以恢复失去的高度。
大型飞机
在大型飞机的航空公司"型号"转换训练中,不练习完全失速。为了使飞行员熟悉其飞机的特性,只进行接近失速(摇杆振动器激活)的训练。
(a) 喷气式飞机(后掠翼):在接近失速时没有特殊考虑。
(i) 无功率失速:在摇杆振动器激活时,平稳地将机头降至地平线或稍低,以解除机翼失速;同时增加功率至最大推荐值以最小化高度损失,使用滚转控制防止机翼下垂,收起起落架并选择起飞襟翼。
(ii) 有功率失速:与无功率失速相同。
(b) 多发螺旋桨。
(i) 无功率失速:在摇杆振动器激活时,平稳地将机头降至地平线或稍低,以解除机翼失速;同时增加功率至最大推荐值以最小化高度损失,使用方向舵和副翼控制防止机翼下垂,收起起落架并选择起飞襟翼。
(ii) 有功率失速:与无功率失速相同。
喷气式和螺旋桨飞机之间的主要区别是在功率应用期间明显的快速变化的螺旋桨扭矩和滑流。飞行员必须在应用控制输入以抵消当发动机处于高功率设置或快速应用功率时螺旋桨产生的变化的滚转和偏航力矩时,保持方向舵和副翼之间的协调。在失速和恢复期间必须防止偏航。
小型飞机
© 单发螺旋桨
(i) 无功率失速:在失速警告时,平稳地将机头降至地平线或稍低,以解除机翼失速;同时增加功率至最大推荐值以最小化高度损失,使用方向舵防止机翼下垂,如适用则收起起落架。
(ii) 单发螺旋桨飞机的有功率失速和恢复有额外的复杂性。在与有功率失速相关的高机头姿态和低空速下,螺旋桨将产生相当大的"转向效应"。(这些在第16章中有详细说明)。
为了在接近有功率失速和从中恢复期间保持协调飞行,单发螺旋桨飞机的飞行员必须用正确的方向舵和副翼组合来补偿螺旋桨的转向效应。在接近失速时AND恢复期间保持协调飞行(球在中间)至关重要。任何偏航倾向都可能轻易发展成螺旋。当飞机机头在失速时下垂,陀螺效应也将明显,增加机头左偏航力矩——对于顺时针旋转的螺旋桨。
在起飞或复飞期间,当飞行员注意力分散时,意外的有功率失速很容易转变为螺旋。在失速的第一个迹象出现时采取正确的失速恢复动作至关重要。(向前移动俯仰控制;使滚转控制回中;并用方向舵防止机翼下垂)。
爬升和下降转弯中的失速和恢复
当飞机在恒定坡度的水平协调转弯中时,内侧机翼比外侧机翼在空气中移动得更慢,因此产生的升力更少。如果副翼保持中立,飞机有继续向坡度方向滚转的倾向(过度坡度倾向)。当达到所需的坡度角时,飞行员不应将副翼回中,而必须保持与坡度方向相反的副翼;空速越低,所需的副翼输入越大。
内侧(较低)机翼由于降低的副翼可能有更大的有效攻角,可能首先达到临界攻角。必须始终使用方向舵保持协调飞行(球在中间)。
在爬升转弯中,空速将更低,在单发螺旋桨飞机中,螺旋桨及其滑流产生的滚转和偏航力将增加对不寻常的方向舵和副翼输入的要求。例如,对于一个顺时针旋转螺旋桨的飞机,在低速左转爬升中,飞行员可能需要保持大量的右滚转副翼和右方向舵。如果在这种情况下的飞机失速,过度的控制偏转可能使飞机剧烈偏航或滚转。在飞行的所有阶段正确协调控制至关重要,以防止意外螺旋的可能性。
结论
无论在什么构型、姿态或功率设置下出现失速警告,正确的飞行员操作是将攻角降低到失速角以下以解除机翼失速,施加最大允许功率以最小化高度损失,并防止任何偏航发展以最小化螺旋的可能性(基本上按这个顺序)。“保持球在中间”。
高速抖振(激波失速)
在解释飞行基本原理时,我们认为在低于声速四成(M 0.4)的速度下,空气是不可压缩的。也就是说,认为压力对空气密度没有影响。在高于M 0.4的速度下,这种假设不再实用,因为飞机周围气流中的密度变化开始对飞机的行为产生差异。

在高空,大型高速喷气式运输机将以略高于其临界马赫数的速度巡航,机翼上会有一个小激波。如果这样的飞机超速,激波将迅速变大,导致激波附近的静压急剧增加。局部增加的不利压力梯度将导致边界层在激波后立即分离,图7.33。这被称为"激波失速"。分离的气流将使尾部区域浸没在非常活跃的湍流尾流中,并导致严重的机身抖振——这是一种非常不希望的现象。
高速抖振(激波失速)可能严重损坏飞机结构,因此安装了一种人工警告装置,如果飞机超过其最大运行速度限制 ( V M O / M M O ) ∗ by \left(\mathrm {V}_{\mathrm {MO}}/\mathrm {M}_{\mathrm {MO}}\right)^{*}\text {by} (VMO/MMO)∗by哪怕是一小部分,也会警告飞行员。高速警告是声音警告(“咔嗒声”、喇叭或警笛),与"低速"高攻角"摇杆振动器"警告容易区分。
我们已经看到,接近临界攻角可能导致机身抖振("低速"抖振),现在我们已经表明,飞行速度过快也会导致机身抖振("高速"抖振)。任何机身抖振都是不希望的,可能迅速导致结构损坏,此外还会使乘客不安。
将会表明,在高巡航高度(36000至42000英尺),高攻角失速警告与高速警告之间的余量可能只有 15 k t 15kt 15kt。
∗ V M O {}^{*}V_{\mathrm {MO}} ∗VMO是最大运行指示空速, M M O \mathrm {M}_{\mathrm {MO}} MMO是最大运行马赫数。(这些将在第14章中详细讨论)。
注意:从运行角度看,有必要以经济上可能的最快速度飞行,设计师不断尝试增加飞机可以飞行的最大速度,而不会出现任何不希望的特性。在认证飞行测试期间,会调查预计的最大速度并确定最大运行速度。最大运行速度限制 ( V M O / M M O ) \left(V_{\mathrm {MO}}/M_{\mathrm {MO}}\right) (VMO/MMO)提供了一个速度余量,飞机可以在其中暂时超速,并在出现任何不希望的特性之前由飞行员恢复。(俯冲、控制效能损失和几个稳定性问题——这些都将在后面的章节中详细说明)。
第173XXX页问题的答案
如果 V s 1 g = 15 V_{s1g}=15 Vs1g=15 k t kt kt C A S CAS CAS,在 2 5 ∘ 25^{\circ } 25∘和 3 0 ∘ 30^{\circ } 30∘坡度中的失速速度。(带有 % \% %比较)
2 5 ∘ = 158 25^{\circ }=158 25∘=158 kt CAS(比 V s 1 g ) \left.V_{s1g}\right) Vs1g)增加 5 % 5\% 5%的失速速度)[升力增加 10 % 10\% 10%]
3 0 ∘ = 161 30^{\circ }=161 30∘=161 kt CAS(比 V s g ) \left.V_{sg}\right) Vsg)增加 7 % 7\% 7%的失速速度)[升力增加 15 % 15\% 15%]
4 5 ∘ = 178 45^{\circ }=178 45∘=178 kt CAS(比 V s 1 g ) \left.V_{s1g}\right) Vs1g)增加 19 % 19\% 19%的失速速度)[升力增加 41 % 41\% 41%]
6 0 ∘ = 212 k t C A S 60^{\circ }=212\mathrm {kt}\mathrm {CAS} 60∘=212ktCAS(比 V s 1 g ) \left.V_{s1g}\right) Vs1g)增加 41 % 41\% 41%的失速速度)[升力增加 100 % 100\% 100%]
关键要点 2
自学
在以下陈述中填入缺失的词语,参考前面段落的内容。
后掠翼是导致________失速的主要因素。
具有超失速倾向的飞机设计必须配备________。
影响 V s R V_{sR} VsR的因素有:
a. ________的变化。
b. 飞机的机动(增加________________)。
c. 构型变化(________和________力矩的变化)。
d. 发动机________和螺旋桨________。
e. ________数。
f. 机翼________。
g. 严重________。
在平直飞行中,载荷系数为________。
在较高重量下,飞机的失速速度将________。
如果重量减少50%,失速速度将________大约________%。
载荷系数随________________而变化。
转弯中失速速度的增加与________________的平方根成正比。
高升力装置将________失速速度,因为 C LMAX \mathrm{C}_{\text{LMAX}} CLMAX________。
重心前移将________失速速度,这是由于尾部________载荷增加。
放下起落架将增加失速速度,这是由于尾部________载荷增加。
增加发动机功率将降低失速速度,这是由于螺旋桨________和/或推力的________倾斜。
马赫数对失速速度的影响始于M________。
压缩性的影响通过降低________来增加失速速度。
机翼前缘结冰可以________失速速度________%。
机翼上的霜冻形成可以________失速速度________%。
飞机在________前必须没有任何________、和。
机身污染________失速速度,方式是降低________,增加不利的________________和/或降低边界层的________能量。
结冰引起的失速迹象可能是飞机________的丧失、振荡或________下降和高________率。人工失速警告将,但空气动力学________可能有助于识别机翼失速的开始。
非常大的________可以________失速速度,这是由于水膜改变了机翼的________轮廓。
在自旋发生前必须先________。
在稳定自旋中,________机翼处于失速状态,一侧比另一侧更严重。
如果飞机上的力不平衡,自旋也可能发展,例如,由于多发飞机上的________故障引起的偏航力,或者如果________因不平衡的________载荷而横向位移。
以下是正常自旋恢复的一般程序:
-
将油门调至________。
-
________副翼。
-
施加全________以对抗自旋。
-
将________操纵迅速移至大约中立位置。
-
________推荐的操纵位置直到旋转停止。
-
当旋转停止时,使________回中。
-
通过对________操纵施加________压力,从随后的俯冲中恢复。
保持侧滑指示器的________在________中可以避免交叉操纵失速。
如果超过________攻角,失速可以在任何________或飞行________下发生。
二次失速可能由于在失速警告时没有充分________攻角________,或者在尝试________失去的高度之前没有给飞机足够的________开始再次________而触发。
单发螺旋桨飞机在意外失速和恢复过程中的另一个复杂因素是由于螺旋桨产生的________和________力。保持平衡、协调的飞行尤为重要,特别是在________空速、高________角时。
无论在什么构型、姿态或功率设置下出现失速警告,正确的飞行员操作是将攻角________到失速角以下以解除机翼失速,施加最大允许________以最小化高度损失,并防止任何________发展以最小化________的可能性。“保持________在中间”。
如果由于意外超速在机翼上形成大型激波,局部增加的________压力梯度将导致________________在激波________立即分离。这被称为"________失速"。
关键要点2,带有填词的内容可在XXX页找到。
问题
-
飞机将在相同的以下条件下失速:
a. 攻角和相对于地平线的姿态。
b. 不管相对于地平线的姿态如何,空速相同。
c. 不管相对于地平线的姿态如何,攻角相同。
d. 不管高度、坡度角和载荷系数如何,指示空速相同。
-
无后掠的机翼典型的失速攻角为:
a. 4°。
b. 16°。
c. 30°。
d. 45°。
-
如果飞机重量增加但重心位置不变,失速攻角将:
a. 保持不变。
b. 减小。
c. 增加。
d. 重心位置不影响失速速度。
-
如果攻角增加到失速角以上:
a. 升力和阻力都将减小。
b. 升力将减小而阻力将增加。
c. 升力将增加而阻力将减小。
d. 升力和阻力都将增加。
-
飞机失速的攻角:
a. 顺风飞行时比逆风飞行时发生在较小的攻角。
b. 取决于机翼上气流的速度。
c. 是速度和密度高度的函数。
d. 无论总重量如何都将保持恒定。
-
一架重量为237,402牛的飞机在132节时失速。当重量为356,103牛时,它将在以下速度失速:
a. 88节。
b. 162节。
c. 108节。
d. 172节。
-
对于1g失速速度为60节IAS的飞机,在稳定的60°转弯中的失速速度将是:
a. 43节。
b. 60节。
c. 84节。
d. 120节。
-
对于处于稳定转弯中的飞机,失速速度将:
a. 与平飞时相同。
b. 比平飞时低。
c. 比平飞时高,且攻角较低。
d. 比平飞时高,且攻角相同。
-
机翼前缘结冰将:
a. 不影响失速速度。
b. 导致飞机在更高的速度和更高的攻角下失速。
c. 导致飞机在更高的速度和更低的攻角下失速。
d. 导致飞机在更低的速度下失速。
-
升力除以重量得到:
a. 机翼负荷。
b. 升阻比。
c. 展弦比。
d. 载荷系数。
-
飞机的失速速度最受以下因素影响:
a. 空气密度的变化。
b. 飞机载荷的变化。
c. 飞行高度的变化。
d. 俯仰姿态的变化。
-
失速可能通过以下方式延迟到更高的攻角:
a. 增加不利压力梯度。
b. 增加机翼上表面的表面粗糙度。
c. 通过结冰积累导致前缘变形。
d. 增加边界层的动能。
-
失速诱导条将:
a. 导致机翼首先在根部失速。
b. 导致机翼首先在翼尖失速。
c. 延迟机翼根部失速。
d. 重新激活机翼根部的边界层。
-
在没有机翼扭转的高度锥形机翼上,失速将开始于:
a. 整个翼展同时。
b. 翼展的中心。
c. 根部。
d. 翼尖。
-
机翼后掠将:
a. 减少低速时的诱导阻力。
b. 增加翼尖失速的倾向。
c. 减少翼尖失速的倾向。
d. 导致失速发生在较低的攻角。
-
后掠翼上边界层栅栏的目的是:
a. 重新激活边界层并防止分离。
b. 控制展向流动并延迟翼尖失速。
c. 在机翼上表面产生涡流。
d. 维持层流边界层。
-
具有外洗的机翼将有:
a. 翼尖弦长小于根部弦长。
b. 翼尖安装角小于根部安装角。
c. 翼尖安装角大于根部安装角。
d. 翼尖弯度小于根部弯度。
-
在没有扭转的非锥形机翼上,下洗:
a. 从根部到翼尖增加。
b. 从翼尖到根部增加。
c. 在整个翼展上保持恒定。
d. 在翼展中心最大,在根部和翼尖较小。
-
厚度恒定且无后掠的机翼:
a. 由于展向流动的增加,将首先在翼尖失速。
b. 由于缺乏任何特定的失速诱导特性,可能在失速时出现机翼下垂。
c. 接近失速时由于压力中心向前移动而机头向下俯冲。
d. 将在整个翼展上均匀失速。
-
缝翼通过以下方式增加失速攻角:
a. 增加前缘弯度。
b. 延迟分离。
c. 减小有效攻角。
d. 减少展向流动。
-
与其他机翼平面形状相比,矩形机翼有首先在以下位置失速的倾向:
a. 机翼根部,提供充分的失速警告。
b. 机翼翼尖,提供不充分的失速警告。
c. 机翼翼尖,提供充分的失速警告。
d. 前缘,即机翼根部与机身连接处。
-
涡流发生器用于:
a. 减少诱导阻力。
b. 减少边界层分离。
c. 诱导根部失速。
d. 抵消翼尖涡流的影响。
-
摇杆振动器是:
a. 一种在高马赫数下工作的超速警告装置。
b. 一种人工稳定装置。
c. 一种使控制杆振动以提供失速警告的装置。
d. 一种通过向下俯冲来防止失速的装置。
-
失速警告装置必须设置为在以下情况下工作:
a. 在失速速度。
b. 在略低于失速速度的速度。
c. 在比失速速度高约5%至10%的速度。
d. 在比失速速度高约20%的速度。
-
就在失速前,机翼前缘驻点位于:
a. 失速警告叶片上方。
b. 失速警告叶片下方。
c. 失速警告叶片顶部。
d. 由于极高的攻角,位于前缘顶部。
-
机翼安装的失速警告探测叶片应位于:
a. 上表面约中弦处。
b. 下表面约中弦处。
c. 前缘下表面。
d. 前缘上表面。
-
失速警告装置(如摇杆振动器)系统的输入数据是:
a. 仅攻角。
b. 攻角,在某些系统中还包括攻角变化率。
c. 仅空速。
d. 空速,有时还包括空速变化率。
-
推杆器是:
a. 一种防止飞机失速的装置。
b. 一种配平系统。
c. 一种在高速时帮助飞行员移动控制的装置。
d. 一种在高速时自动补偿俯仰变化的装置。
-
在完全发展的自旋中:
a. 两个机翼的攻角都将为正。
b. 两个机翼的攻角都将为负。
c. 一个机翼的攻角将为正,另一个将为负。
d. 下降的机翼将处于失速状态,上升的机翼将不处于失速状态。
-
要从自旋中恢复,升降舵应:
a. 向上移动以增加攻角。
b. 向下移动以减小攻角。
c. 设置为中立位置。
d. 允许自由浮动。
-
高速抖振(激波失速)是由以下原因引起的:
a. 在高攻角下边界层在激波前分离。
b. 边界层在激波后立即分离。
c. 激波撞击飞机尾部。
d. 激波撞击机身。
-
在30°坡度的水平转弯中,失速速度将增加:
a. 7%。
b. 30%。
c. 1.07%。
d. 15%。
-
大雨可能因以下哪种原因增加飞机的失速速度?
a. 水增加了空气的粘度。
b. 大雨可能堵塞皮托管,导致错误的空速指示。
c. 水膜对气动表面的额外重量和变形。
d. 大雨的冲击将减慢飞机速度。
-
如果水平尾翼提供向下的力并因结冰污染而失速:
a. 机翼将失速,由于飞机重心后方的冰的重量,飞机将向上俯仰。
b. 由于冰形成导致水平尾翼上的重量增加,飞机将向上俯仰,这将导致机翼失速。
c. 因为它提供向下的力,飞机将向上俯仰。
d. 飞机将向下俯仰。
-
结冰引起的失速迹象可能是:
-
人工失速警告装置。
-
空速接近正常失速速度。
-
剧烈的横滚振荡。
-
机身抖振。
-
剧烈的机翼下垂。
-
在"正常"飞行姿态下极高的下降率。
a. 1、2、4和5。
b. 1、3和5。
c. 1、4和6。
d. 3、4、5和6。
-
-
如果一架轻型单发螺旋桨飞机在向左爬升转弯中带动力失速,以下哪项是首选的恢复动作?
a. 升降舵操纵杆向前,副翼操纵杆中立,方向舵防止机翼下垂。
b. 升降舵操纵杆中立,方向舵中立,副翼防止机翼下垂,功率降至怠速。
c. 升降舵操纵杆向前,副翼和方向舵防止机翼下垂。
d. 升降舵操纵杆中立,方向舵中立,副翼操纵杆中立,功率降至怠速。
-
如果摇杆振动器在后掠翼喷气式运输机起飞后立即在转弯时激活,以下哪项陈述包含首选的行动方案?
a. 减小攻角。
b. 增加推力。
c. 监控仪表以确保它不是虚假警告。
d. 减小坡度角。
关键要点 1(已完成)
失速涉及到高度的损失和控制的损失。
飞行员必须能够清晰明确地识别失速。
失速是由气流分离引起的。
分离可能发生在边界层缺乏足够的动能或不利压力梯度变得过大时。
逆压梯度随着攻角的增加而增加。
失速发生时的攻角的其他名称是失速角和临界攻角。
失速发生时的升力系数是** C LMAX \mathrm {C}_{\text {LMAX}} CLMAX**。
失速可以在任何空速或飞行姿态下发生。
典型的失速角约为16°。
要从失速中恢复,攻角必须减小。
在失速恢复过程中使用最大功率以最小化高度损失。
在小型飞机上,应使用方向舵来防止机翼在失速时下垂。
在后掠翼飞机上,应使用副翼来防止机翼在失速时下垂。
通过适度的向后压力在升降舵控制上恢复失速过程中损失的高度。
失速的最初迹象可能是迟钝飞行控制,失速警告装置或空气动力学抖振。
在接近失速的速度下,必须谨慎使用副翼来抬起下沉的机翼。
可接受的失速指示是:
(1) 无法轻易阻止的机头下俯俯仰。
(2) 严重的抖振。
(3) 俯仰控制达到后止动点,并且不再发生俯仰姿态的增加。
参考失速速度 ( V S R ) \left(V_{SR}\right) (VSR)是由飞机制造商定义的校准空速。
V S R V_{SR} VSR不得小于1g失速速度。
当安装了在选定的攻角时突然推动机头的装置时, V S R V_{SR} VSR不得小于该装置操作时速度之上2节或2%,以较大者为准。
在直线和转弯飞行中,必须向飞行员提供具有足够余量以防止意外失速的失速警告,且该警告必须清晰和明显。
可接受的失速警告可能包括飞机固有的空气动力学特性或在预期飞行条件下提供明显区分指示的装置。
失速警告必须在超过失速速度不少于5节或5%校准空速(以较大者为准)的速度下开始。
小型飞机上的人工失速警告通常由喇叭或蜂鸣器给出。
大型飞机上的人工失速警告通常由摇杆抖动器给出,结合灯光和噪音发生器。
人工失速警告装置可以通过襟翼开关、攻角叶片或攻角探头激活。
大多数攻角传感器计算攻角的变化率,以在加速接近失速时提供更早警告。
EASA要求的失速特性,直到飞机失速时为止,包括:
a. 必须能够通过不反向使用副翼和方向舵产生和纠正偏航。
b. 不得出现异常的机头上仰趋势。
c. 纵向控制力必须为正。
d. 必须能够通过正常使用控制装置迅速防止失速并从失速中恢复。
e. 在失速和完成恢复之间不应有过度的滚转。
f. 对于转弯飞行失速,失速后飞机的动作不得过于剧烈或极端,以至于使用正常的驾驶技能难以迅速恢复并重新获得对飞机的控制。
具有小前缘半径的翼型将在较小攻角失速,且失速将更加明显。
具有大厚弦比的翼型将在较高攻角失速,且失速将更加平缓。
在前缘附近有弯度的翼型将在更高的攻角失速。
矩形机翼平面形状将倾向于首先在根部失速。
矩形机翼平面形状通常具有理想的失速特性;这些特性是:
a. 在失速时副翼有效性。
b. 在失速时机头下垂。
c. 在失速时具有空气动力学抖振。
d. 在失速时没有剧烈的机翼下垂。
为了使锥形平面形状的机翼具有所需的失速特性,设计中可以包含以下装置:
a. 外翼减小(从根部到翼尖的入射角递减)。
b. 在翼尖处具有更大厚度和弯度的翼型。
c. 在翼尖处的前缘缝翼。
d. 安装在机翼内侧前缘的失速条。
e. 涡流发生器,在翼尖处重新激活边界层。
后掠翼由于机翼上表面从根部到翼尖的边界层的展向流动而增加了翼尖失速的倾向。延迟后掠翼平面形状翼尖失速的方法有:
a. 机翼栅栏,通常从前缘延伸到后缘的薄金属栅栏,位于机翼上表面。
b. 涡流片,也是薄金属栅栏,但较小,位于机翼前缘的下侧。
c. 锯齿状前缘,在高攻角时在机翼上表面产生涡流。
d. 吊舱式机翼发动机的发动机短舱也起到涡流发生器的作用。
e. 涡流发生器也用于延迟后掠翼的翼尖失速。
后掠翼平面形状的翼尖失速使飞机在失速时有上仰-俯仰的倾向。这是由于当机翼尖先失速时,压力中心向前移动所致。
关键要点 2(已完成)
正确的陈述
关键要点 2
自学
在以下陈述中填入缺失的词语,参考前面段落的内容。
后掠翼是导致超失速失速的主要因素。
具有超失速倾向的飞机设计必须配备推杆装置。
影响 V s R V_{sR} VsR的因素有:
a. 重量的变化。
b. 飞机的机动(增加载荷系数)。
c. 构型变化( C LMAX \mathrm{C}_{\text{LMAX}} CLMAX和俯仰力矩的变化)。
d. 发动机推力和螺旋桨滑流。
e. 马赫数。
f. 机翼污染。
g. 严重降雨。
在平直飞行中,载荷系数为一。
在较高重量下,飞机的失速速度将更高。
如果重量减少50%,失速速度将减少大约25%。
载荷系数随坡度角而变化。
转弯中失速速度的增加与载荷系数的平方根成正比。
高升力装置将降低失速速度,因为 C LMAX \mathrm{C}_{\text{LMAX}} CLMAX增加。
重心前移将增加失速速度,这是由于尾部下压载荷增加。
放下起落架将增加失速速度,这是由于尾部下压载荷增加。
增加发动机功率将降低失速速度,这是由于螺旋桨滑流和/或推力的向上倾斜。
马赫数对失速速度的影响始于M0.4。
压缩性的影响通过降低** C LMAX \mathrm{C}_{\text{LMAX}} CLMAX**来增加失速速度。
机翼前缘结冰可以增加失速速度30%。
机翼上的霜冻形成可以增加失速速度15%。
飞机在起飞前必须没有任何积雪、霜冻和结冰。
机身污染增加失速速度,方式是降低** C LMAX \mathrm{C}_{\text{LMAX}} CLMAX,增加不利的压力梯度和/或降低边界层的动**能量。
结冰引起的失速迹象可能是飞机性能的丧失、滚转振荡或机翼下降和高下降率。人工失速警告将缺失,但空气动力学抖振可能有助于识别机翼失速的开始。
非常大的降雨可以增加失速速度,这是由于水膜改变了机翼的空气动力学轮廓。
在自旋发生前必须先失速。
在稳定自旋中,两个机翼处于失速状态,一侧比另一侧更严重。
如果飞机上的力不平衡,自旋也可能发展,例如,由于多发飞机上的发动机故障引起的偏航力,或者如果重心因不平衡的燃油载荷而横向位移。
以下是正常自旋恢复的一般程序:
-
将油门调至怠速。
-
使副翼回中。
-
施加全方向舵以对抗自旋。
-
将升降舵操纵迅速移至大约中立位置。
-
保持推荐的操纵位置直到旋转停止。
-
当旋转停止时,使方向舵回中。
-
通过对俯仰操纵施加渐进的后压力,从随后的俯冲中恢复。
保持侧滑指示器的球在中间中可以避免交叉操纵失速。
如果超过临界攻角,失速可以在任何速度或飞行姿态下发生。
二次失速可能由于在失速警告时没有充分减小攻角或,或者在尝试恢复失去的高度之前没有给飞机足够的时间开始再次飞行而触发。
单发螺旋桨飞机在意外失速和恢复过程中的另一个复杂因素是由于螺旋桨产生的滚转和偏航力。保持平衡、协调的飞行尤为重要,特别是在低空速、高攻角角时。
无论在什么构型、姿态或功率设置下出现失速警告,正确的飞行员操作是将攻角降低到失速角以下以解除机翼失速,施加最大允许功率以最小化高度损失,并防止任何偏航发展以最小化螺旋的可能性。“保持球在中间”。
如果由于意外超速在机翼上形成大型激波,局部增加的逆压力梯度将导致边界层在激波后立即分离。这被称为"激波失速"。
答案
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| c | b | a | b | d | b | c | d | c | d | b | d |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| a | d | b | b | b | a | b | b | a | b | c | c |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 | 32 | 33 | 34 | 35 | 36 | 37 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| b | c | b | a | a | b | b | a | c | d | d | a | a |