本文提出了一种前瞻性失稳时间预测方法(PFTF),可用于实时或拟实时预测滑坡、冰崩等地质灾害的失稳时间。该方法基于改进的反速度法(Inverse Velocity Method),通过多窗口平滑、迭代更新、以及自动识别加速起点(Onset of Acceleration, OOA)实现。
[1] Leinauer J, Weber S, Cicoira A, et al. An approach for prospective forecasting of rock slope failure time[J]. Communications Earth & Environment, 2023, 4(1): 253.
一种用于预测岩质边坡破坏时间的前瞻性方法
📖 作者与单位信息
作者:Johannes Leinauer✉, Samuel Weber, Alessandro Cicoira, Jan Beutel, Michael Krautblatter
单位:
- Landslide Research Group, TUM School of Engineering and Design, Technical University of Munich, Munich, Germany
- WSL Institute for Snow and Avalanche Research SLF, Davos Dorf, Switzerland
- Climate Change, Extremes and Natural Hazards in Alpine Regions Research Center (CERC), Davos Dorf, Switzerland
- Department of Geography, University of Zurich, Zurich, Switzerland
- Department of Computer Science, University of Innsbruck, Innsbruck, Austria
通讯作者:Johannes Leinauer ✉ (johannes.leinauer@tum.de)
📌 这篇论文主要解决了什么问题?
边坡失稳(如滑坡、冰崩等)灾害通常在短时间内加速,如何基于实时监测位移数据,及时预警即将到来的失稳是个关键技术难题。传统的方法往往滞后或者预测不够稳定、不具备实时性。
📌 PFTF 模型做了什么?
PFTF 是一种前瞻性、迭代式、实时预测方法,核心是基于反速度法(Inverse Velocity Method),但对原方法做了结构化改进:
- 利用多个速度/平滑窗口,降低人为选择窗口长度带来的偏差。
- 定义了一套自动检测加速起点(onset of acceleration, OOA) 的机制,确保预测从合理位置开始。
- 通过多窗口的统计分析,估算预测失效时间的不确定性区间。
📌 它是怎么实现的?(方法流程)
📊 数据预处理:
将原始位移/倾斜数据整理成等时间步长的时间序列。
📉 数据平滑:
- 第一步:用多个窗口( w smooth w_{\text{smooth}} wsmooth)做移动平均平滑。
- 第二步:计算速度与反速度时,窗口内线性回归再平滑。
📈 反速度计算:
用多个速度窗口( w v w_v wv)计算反速度序列。
📍 加速起点(OOA)自动检测:
基于 4 个判据自动确定 OOA:
- 位移速率增加
- 所有 w v w_v wv 中反速度下降
- 所有 w v w_v wv 中 50% 分位数下降
- 当前反速度小于历史 1% 分位数
📅 失效时间预测:
基于 Fukuzono 方法( α = 2 \alpha=2 α=2)对 OOA 之后反速度线性回归外推,预测失稳时间。
📊 不确定性表达:
绘制 life expectancy 图和 boxplot,表示不同窗口预测结果及其均值与置信区间。
📌 实际应用效果如何?
作者在 14 个历史失稳案例(滑坡/冰崩)上测试,发现:
- PFTF 模型可以实时更新预测,每新增一个数据点就重新计算;
- 能较早、稳定检测 OOA;
- 预测结果随数据更新逐步收敛;
- 预测误差较小,不确定性合理。
📌 论文贡献总结:
- 提出了一种多窗口+实时迭代的失稳预测方法;
- 定义了 OOA 自动检测的标准判据;
- 提供了预测结果的不确定性量化方法;
- 全部实现开源 R 代码,方便其他学者/工程师复现与应用。
全文翻译
摘要
全球范围内,岩质边坡失稳是造成单次滑坡灾害的主要类型。山区气候变化加剧了失稳活动的发生频率,同时也提升了对可靠失稳时间预测的需求。当前最先进的预测模型在处理高频边坡变形数据时常常面临困扰。在前瞻性应用中,由于数据滤波、起始点定义和预测不确定性等因素仍具有一定的主观性,预测结果往往存在歧义。
本文提出了一种前瞻性的失稳时间预测模型,通过多重滤波处理和反速度百分位分析,尽量减少人为判断对结果的影响。该方法在14起历史边坡失稳事件(体积范围为 1 0 2 10^2 102– 1 0 8 10^8 108 m³)中进行了验证,涉及来自不同传感器的46组位移数据。在自动检测到加速度开始点后,所有事件的失稳时间预测精度为:高频数据误差为 − 1 ± 17 -1 \pm 17 −1±17 小时,日尺度数据误差为 − 1 ± 4 -1 \pm 4 −1±4 天,最终平均预测不确定度分别为 1 ± 1 1 \pm 1 1±1 天和 7 ± 4 7 \pm 4 7±4 天,且均可在实时估算过程中获得。
该前瞻性方法通过在多种灾难性边坡失稳类型及传感器数据中引入稳健而统一的预测概念,克服了长期以来存在的难题。
引言
在世界各地,不同规模的边坡不稳定性频繁地威胁着人类的生命、安全和财产[^1–4]。 仅大规模岩质边坡失稳事件(包括岩滑、岩崩和岩堆流)就在过去一千年中占据了58%的单次滑坡灾害(即广义上的顺坡方向质量运动)[^5]。 在当前持续的气候变化背景下,滑坡风险预计将显著增加[^6], 因此亟需具备广泛适用性的、具有成本效益的防灾减灾措施。诸如预警系统或危险区域人员撤离等应对手段,都依赖于对即将发生失稳事件的可靠预测[^7,8]。
局地监测系统可提供可用于预测边坡失稳时间的重要数据[^9]。 然而,为了满足社会、经济与科研等多方面的需求,现有的预测方法在实时处理现代监测数据方面仍需改进,并且亟需一个可适用于多种失稳机制的统一理论基础。所有边坡失稳事件均表现出特定幅度和持续时间的前兆性变形[^10]。 这些前兆信号(如变形速率的增加或地震活动的增强)源于不稳定岩体内部的裂隙逐步扩展与非弹性变形[^11]。
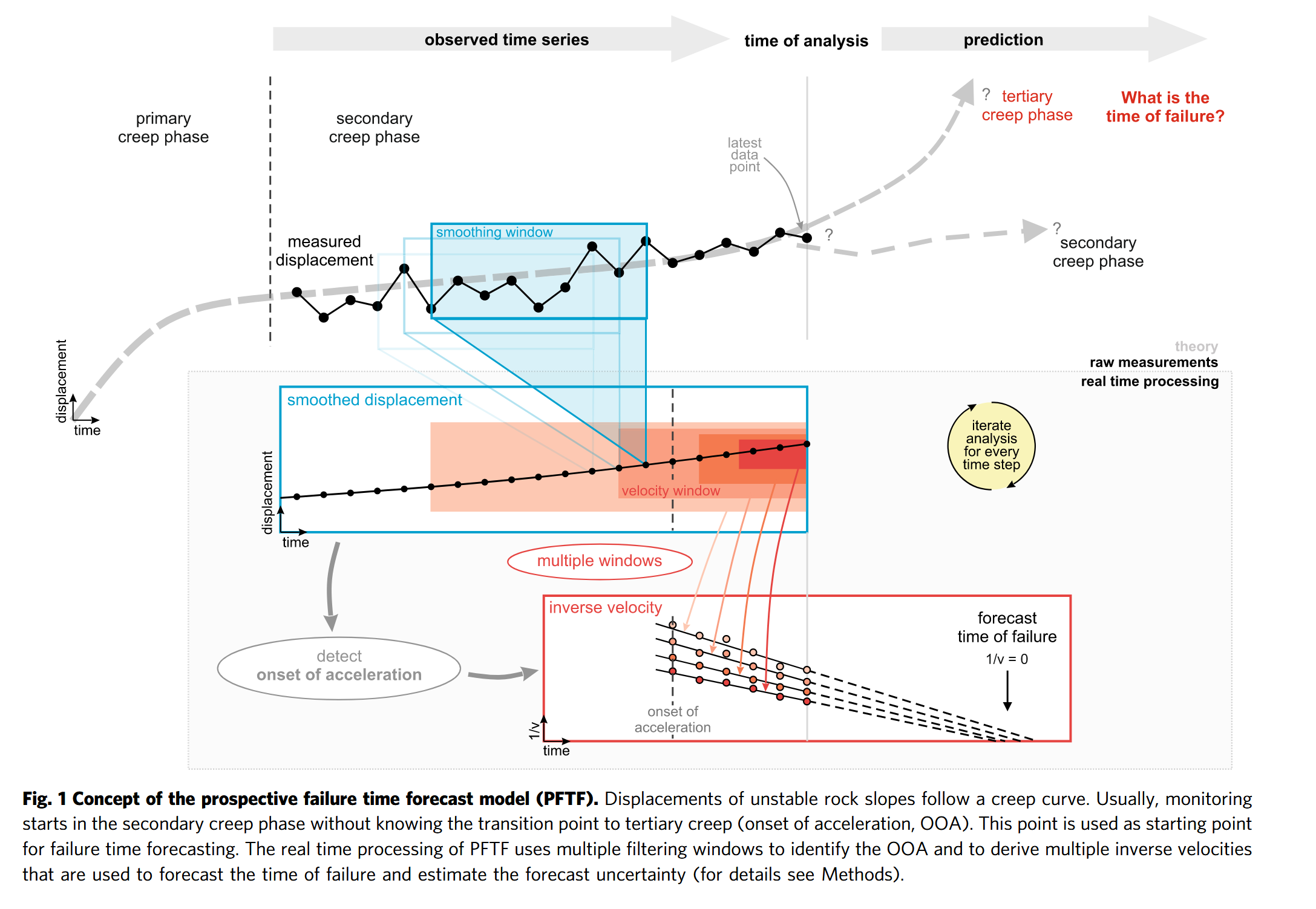
实测的失稳前表面位移过程可用经典的蠕变曲线描述[^9] (图1上图)。在次生蠕变阶段,在恒定应力条件下,稳定与不稳定作用相互抵消,使应变速率保持恒定。随着材料疲劳导致的应力增加,系统内部产生正反馈机制,使部分支撑结构逐渐失效[^12–15]。 最终,在加速蠕变阶段,应变速率与时间呈幂律关系,即进入三级蠕变状态。一般而言,滑坡体积越小、岩体越脆,加速阶段持续时间越短[^16], 可能从数秒到数天、数周甚至数月不等。当前,已有多种方法可用于该加速阶段内的失稳时间预测[9,17–22],其中最常用的是 Fukuzono 提出的反速度法[^19], 其因图解法相对简便而被广泛采用[^23–25]。
在该方法中,将边坡体反速度随时间绘制于图中,在三级蠕变期间进行线性拟合,外推曲线与横轴的交点(即速度无限大时刻)即为预测的失稳时间(图1下图)。尽管在事后分析中常能找到良好的反速度线性拟合以匹配实际失稳时间[7–9,26–30],但在实时场景中实现可靠的前瞻性预测仍是一大挑战[^31,32]。
现代监测系统已能通过原位设备(如裂缝计、倾斜计、全球导航卫星系统)或卫星与地基遥感技术[^29,33],在高时空分辨率下(近)实时地监测地表位移。这类数据为早期预警提供了机会,但当前的预测模型尚未与高频、往往噪声较大的变形数据相适配,因而预测结果仍然存在较大歧义。
尤其是在数据滤波、起始点判定与预测不确定性方面仍缺乏明确标准。滤波处理可以提升预测精度,但往往带有主观性[23,24,34,35]。尽管预测时间对平滑程度较为敏感,文献中大多数应用反速度法时仅使用了一个或两个主观选定的时间窗。预测结果对次生蠕变与三级蠕变过渡点(即速度从恒定转为加速的时刻)的定义也极为敏感。该点被称为加速度起始点(Onset of Acceleration, OOA),是预测的起始依据(见图1)[31,34]。
监测工作通常始于次生蠕变阶段,而在实时情境中,判断边坡何时进入三级蠕变仍具有挑战性(图1上图)。如果 OOA 设置过早,反速度回归可能纳入并非处于最终失稳阶段的数据点,导致误导性预测;反之,若 OOA 设置过晚,则可能遗漏重要观测值。
现代预警系统通常提供多个传感器的高频观测数据,因此前瞻性实时预测方法需具备大体自动化的起始点识别机制。然而,目前仅有少数新近提出的方法[24,35,^36],虽然在某些案例中效果良好,但仍可能出现非最优 OOA 或误报。进一步地,预测结果的可靠性与不确定性是决策者必须了解的信息,但在过去,这一部分往往被忽视[7,37]。
近年来,有学者尝试通过反速度回归的分布特性[38,39]、标准误的计算[^30], 或通过定义高概率失稳时间窗[^24] 来评估预测不确定性。然而,仍缺乏一种可用于统计学实时不确定性估计的标准流程。因此,目前尚未建立一种无需事后调整、具有清晰数据平滑过程、非主观 OOA 判定机制和系统性实时不确定性评估的完整预测概念。
本文提出了一种前瞻性失稳时间预测模型(Prospective Failure Time Forecast, PFTF),通过分析14次边坡失稳事件的46组日尺度或更高频率的观测数据,建立了一个在多种传感器与失稳类型中均适用的统一、稳健的预测框架。该方法可在加速度起始点被可靠识别后,自动实现包含不确定性估计的实时预测。总体上,数据频率越高、越接近实际失稳时刻,预测精度越高。本模型可在多种关键场景中为决策者提供有效支持。
概念框架
本研究提出的预测概念框架(见图1)包括迭代的实时数据处理、双阶段滤波处理(包含多个不同长度的滤波窗口,图1中蓝色和红色所示)、自动起始点判定机制以及每次预测结果的统计不确定性估计。我们将该框架集成并实现为一套可实际运行的前瞻性失稳时间预测模型(PFTF),其设计完全满足实时失稳预测的要求。
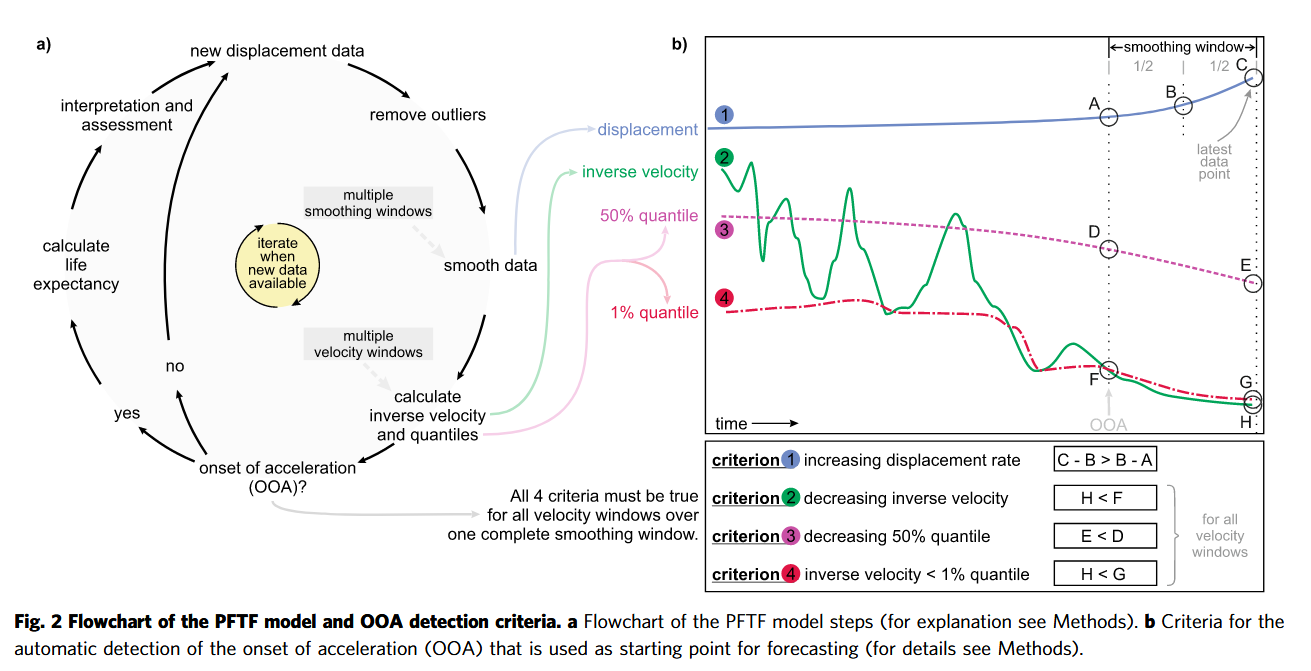
PFTF 会在每获取一个新数据点时执行一次迭代运算[24,25],仅使用已有的历史观测数据,且在计算时并不依赖实际失稳时刻。这一前向建模策略仅使用可预先获取的数据,因此其开源算法设计(见图2a)不仅支持对即将发生失稳事件的实时预测,也可用于对既往失稳事件进行前瞻性分析(即模拟实时预测)。该模型能够处理多源高频观测数据(详见方法部分)。
PFTF 的第一个关键组成部分是双阶段平滑策略,结合多个平滑窗口长度(详见“使用多重数据的前瞻性实时预测”部分),这一机制有助于实现加速度起始点(Onset of Acceleration, OOA)的自动检测(详见“自动 OOA 检测”部分)及预测结果的不确定性估计(详见“收敛预测”部分)。
在第一阶段的滤波中,采用滚动平均法对原始位移数据在特定平滑窗口( w smooth w_\text{smooth} wsmooth)内进行处理,以明确位移趋势。在第二阶段,根据多个速度计算窗口( w v w_v wv,详见方法部分)内的线性回归结果,计算每组位移数据的多个反速度值。用于计算速度的数据点数量取决于所选的速度窗口长度(图1中红框与箭头所示)。
第二个关键模块是自动 OOA 检测方法。该方法基于四项简单判定标准,并对平滑窗口( w smooth w_\text{smooth} wsmooth)内的所有数据点进行分析(图2b,详见方法部分):
- 标准1:要求位移速率持续增加;
- 标准2:要求所有速度窗口( w v w_v wv)对应的反速度均呈下降趋势;该标准与标准1不同,因为多组反速度数据可能呈现不同趋势;
- 标准3:要求整体表现为加速变形趋势,具体由反速度的50%分位数呈下降趋势表示;
- 标准4:要求存在短期加速趋势,即最近一次反速度小于历史所有反速度的第1百分位值,意味着当前速度大于99%的历史速度。
若上述四项标准在一个完整平滑窗口内同时满足,则判定为已发生 OOA。该过程由算法自动执行,无需人工干预。
一旦检测到 OOA,模型便使用 OOA 之后的所有反速度值,通过 Fukuzono 法(线性形式, α = 2 \alpha = 2 α=2)计算预期失稳时间[^19]。
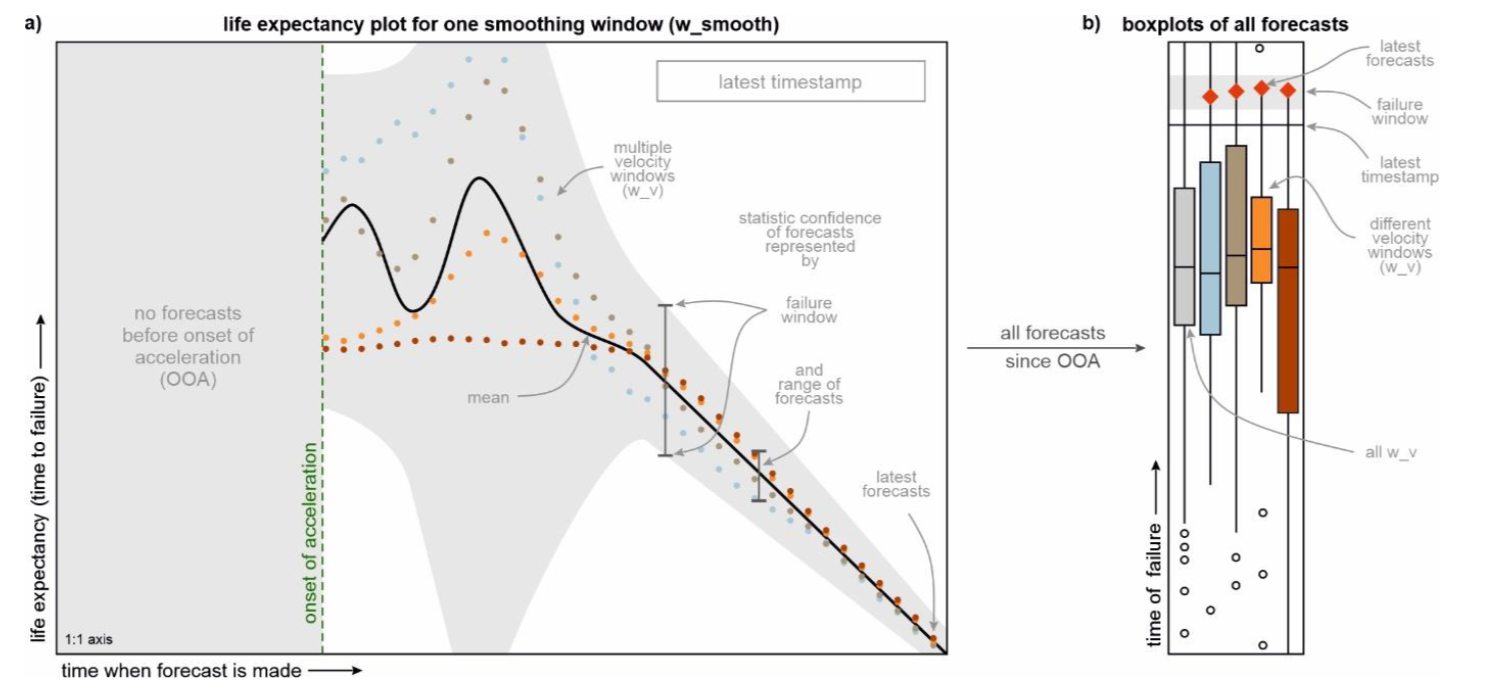
我们采用动态更新的剩余寿命图(life expectancy plots)对预测结果进行评估,该图将“预测失稳时间前剩余时间”与“预测发生时刻”进行对比绘制[24,34],并结合实时统计信息进行补充(详见补充图1a与方法部分)。
为实现不同试验场地间的实时不确定性统计评估,我们在原有失稳时间窗方法[^24]基础上进行了改进:引入多个平滑窗口并叠加使用,同时计算平均预测剩余时间。失稳时间窗的宽度及其边界的一致性可作为预测可靠性的有效指示器。此外,我们还在箱形图中展示重要的更新统计信息(见补充图1b)。
结果与讨论
多重数据滤波下的前瞻性实时预测
所提出的预测概念使得利用多种岩质边坡监测数据进行前瞻性失稳时间预测成为可能。借助多重平滑策略,我们可以有效减少原始数据中的初级仪器噪声,并将所有观测到的位移数据纳入反速度的计算过程之中。该方法在不降低对趋势变化敏感性的前提下提升了预测结果的稳定性[^35],且不同平滑窗口长度对预测的影响可在实时图示中直接分析(见补充图1)。
通常,平滑窗口长度从数小时到数天不等,但合理的窗口长度取决于以下因素:
- 信噪比 / 数据质量,主要受以下因素控制:
- 变形速率(信号强度)
- 测量技术(噪声强度)
- 测量频率
- 加速前兆阶段的预期持续时间及应急响应所需时间(平滑窗口应短于该时间)
- 其他自然噪声的幅度,会导致测得数据偏离理想线性反速度趋势[^24]
运动速率较快的不稳定体通常需要较短的平滑窗口,而运动缓慢且噪声较大的不稳定体则需更强的平滑处理[24]。此外,测量频率越高,记录的背景噪声越多,因此需要在更多观测点上进行滤波;相反,若监测频率较低(如每日一次),噪声影响则相对较小[24]。这也可能解释了 Iwata 与 Sasahara(2021)报告中测量时间间隔越长预测精度越高的现象[^40]。
然而,本研究对 Galterengraben、La Saxe、Veslemannen 和 Weissmiess 等地的分析表明:若监测频率过低,可能无法识别加速前兆,或因数据点过少而无法进行可靠预测。这一问题在地质力学性质较强、由脆性硬岩构成的边坡中尤为显著,其加速阶段可能非常短暂[24]。因此,我们认为高频率监测是实现有效预测的关键,尤其在加速阶段较短的情况下更为重要[35]。
建议监测频率为:体积大于
1
0
6
m
3
10^6\ \mathrm{m^3}
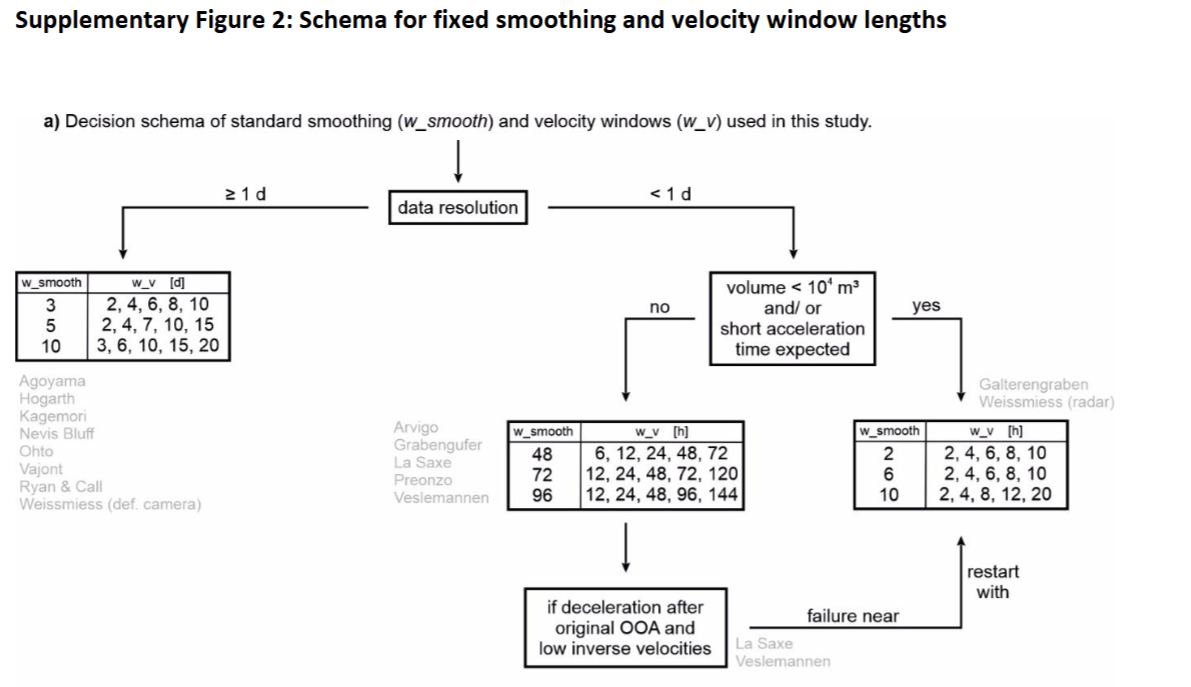
106 m3 的不稳定体,至少应达到日频或更高;体积较小者,则建议小时级或更高频率。此时应结合相应的数据滤波策略,依据具体频率与信噪比进行设定(参见补充图2)。许多监测方法可在不增加成本或操作负担的前提下实现更高频率的采样。
尽管延长平滑窗口有助于降低预测的不确定性,过度平滑却可能扭曲预测结果,并对时间序列引入滞后效应(参见“收敛预测”部分),从而导致预测时间滞后于实际失稳时间(即“失稳后预测”),应尽量避免。因此,平滑窗口应尽可能短,但又必须足够长以保证数据稳定性。
由于每个边坡的不稳定性具有特定的复杂性,目前仍无法制定统一的最优窗口长度标准。为确保本研究各监测点之间具有可比性,我们根据数据分辨率及预期加速阶段的时长,采用三组固定窗口长度(参见补充图2)。
在实际应用中,需对不稳定斜坡的地质过程及监测数据质量有详尽了解,由操作人员决定合理的平滑窗口长度,甚至可能需要同时使用多个窗口进行计算,尽管这会增加结果的解释难度。
此外,平滑窗口并非固定不变。在条件发生变化时(例如 OOA 后出现减速,但仍假设失稳即将发生),需对平滑窗口进行调整(详见补充图2及 La Saxe 与 Veslemannen 地点的情况)。
加速度起始点的自动检测
自动识别加速起始点(OOA)可最大程度减少在失稳迫近压力下进行关键实时判断时的人为主观性,同时也可与已有方法结合使用。我们提出的 OOA 检测方法在本研究测试的14个监测点中均表现出较强的鲁棒性(详见补充表与“收敛预测”部分)。
OOA 能够在失稳前0.1–200天之间成功识别,其判定时间与失稳体积和变形机制相关(参见“收敛预测”)。与平滑窗口类似,当趋势发生变化时(如出现新的加速或减速),应重新启动 OOA 分析。尽管应尽量减少误报的发生,但由于周期性加速与自然变异的存在,误报仍不可完全避免。
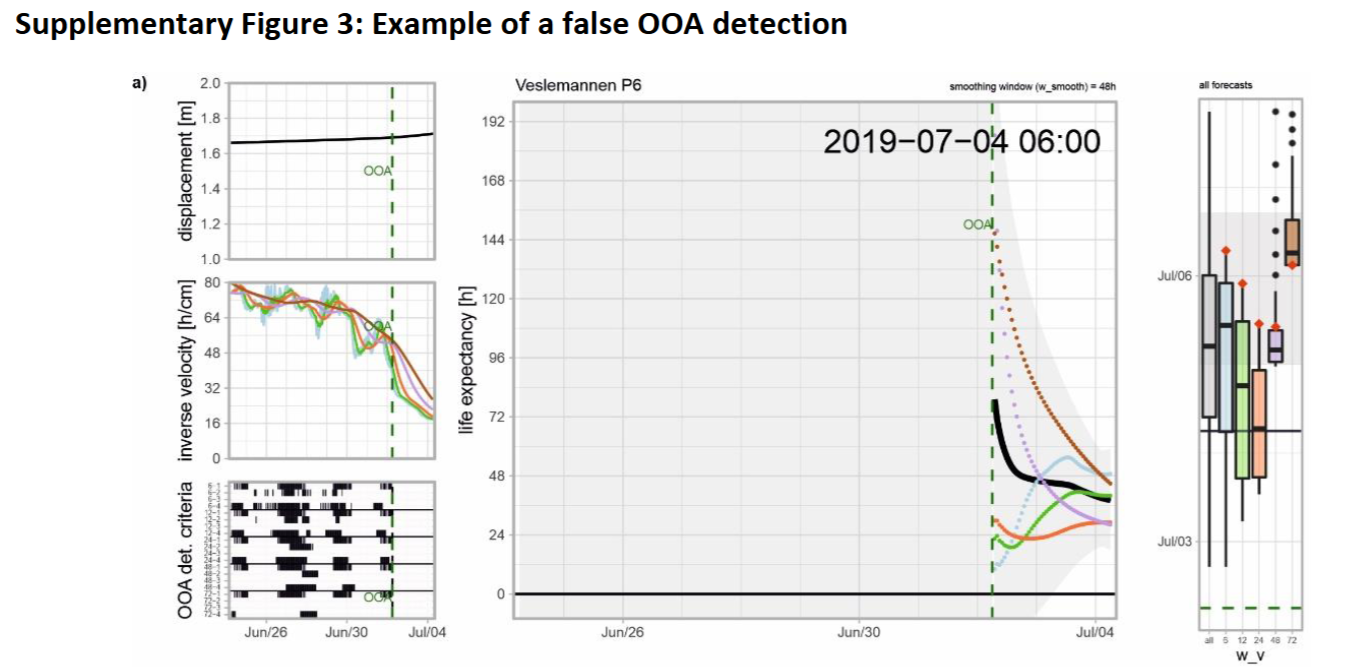
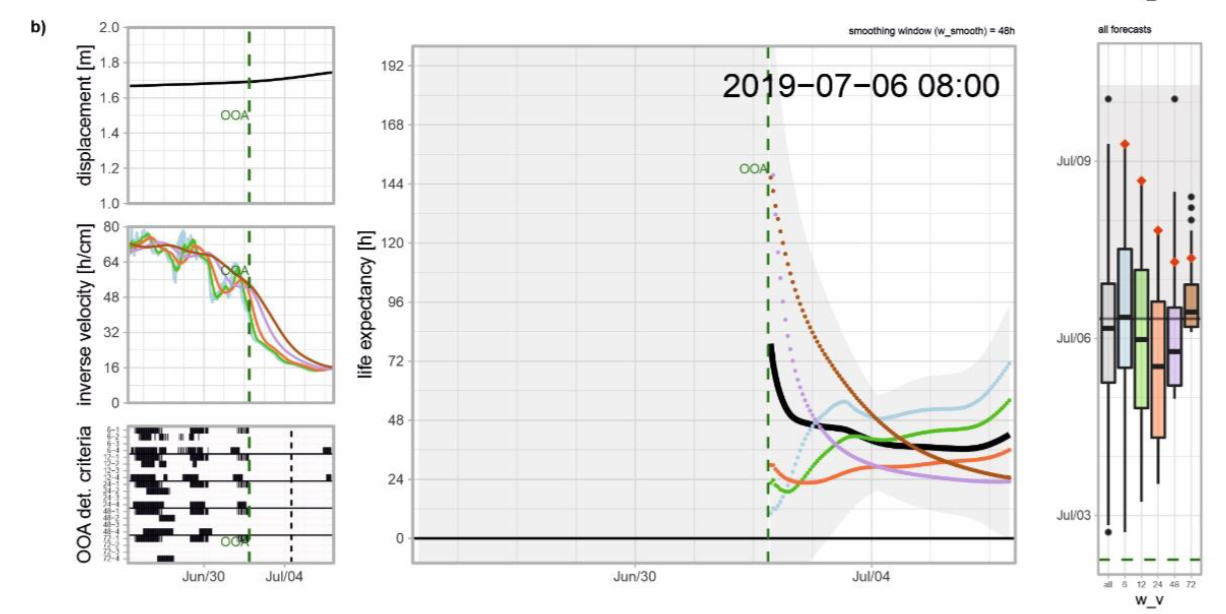
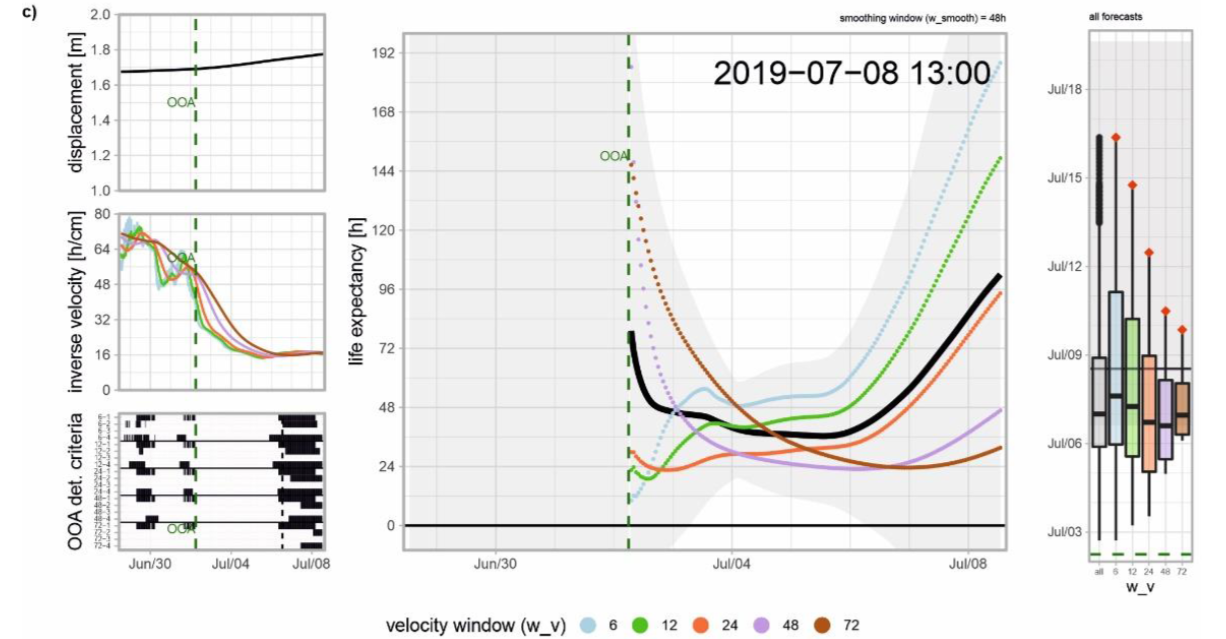
在14个测试站点中,PFTF 模型在 La Saxe 和 Veslemannen 出现了两次误判的 OOA。典型的寿命预测图(life expectancy plot)如补充图3所示:一旦出现持续减速且剩余寿命显著延长,即可判断为误判。此时,建议重新启动分析,仅使用减速阶段之后的数据,将获得更可靠的预测结果。
值得注意的是,OOA 的误判不一定立即引发误报。早期预警系统操作人员在评估预测结果后,可选择手动干预(若为误判),或发出报警(若超出阈值)。另一方面,若在实际失稳前无法及时识别 OOA,模型将出现漏报。此类情况约占所有分析的 4%。
导致此类误报或漏报的常见原因包括:信噪比差、噪声波动幅度接近或大于加速信号等问题。这时可通过改善监测质量、优化平滑窗口设置、引入多种方法联合应用及加深对不稳定机制的理解来提升预测效果。
汇聚预测结果。
通过使用多个窗口,本研究实现了对实时不确定性的估计,并通过寿命期望图中失效窗口及其均值的绘制进行表达。失效窗口的收敛意味着预测置信度的提升。在实际应用系统中,预设的报警限值可以通过水平线在图中绘制(例如设置在寿命期望为 24 小时时)。当失效窗口或其均值达到某些预警阈值时,可以触发不同的预警等级或应对措施。具体到某一场地,报警到失效的时间依赖于所需的应急响应时间(如撤离)和预期的安全水平。
此外,随着更新后的箱型图(boxplot)引入,读者可以更方便地评估历史预测结果的变化范围以及所采用平滑方法的影响。随着持续迭代更新,主要出现在预测尚未收敛之前的异常预测将表现为离群点。在不同速度窗口(
w
v
w_v
wv)下最新的失效时间预测(红色菱形标记)被叠加在图中,帮助评估最新预测与趋势。若该标记在箱体上方稳定存在,则表明失效时间预测趋于延后,反之则可能提前。尽管需要谨慎解读箱型图,但它提供的信息远多于仅包含寿命期望曲线的图,因为最新预测并不总是最准确的。
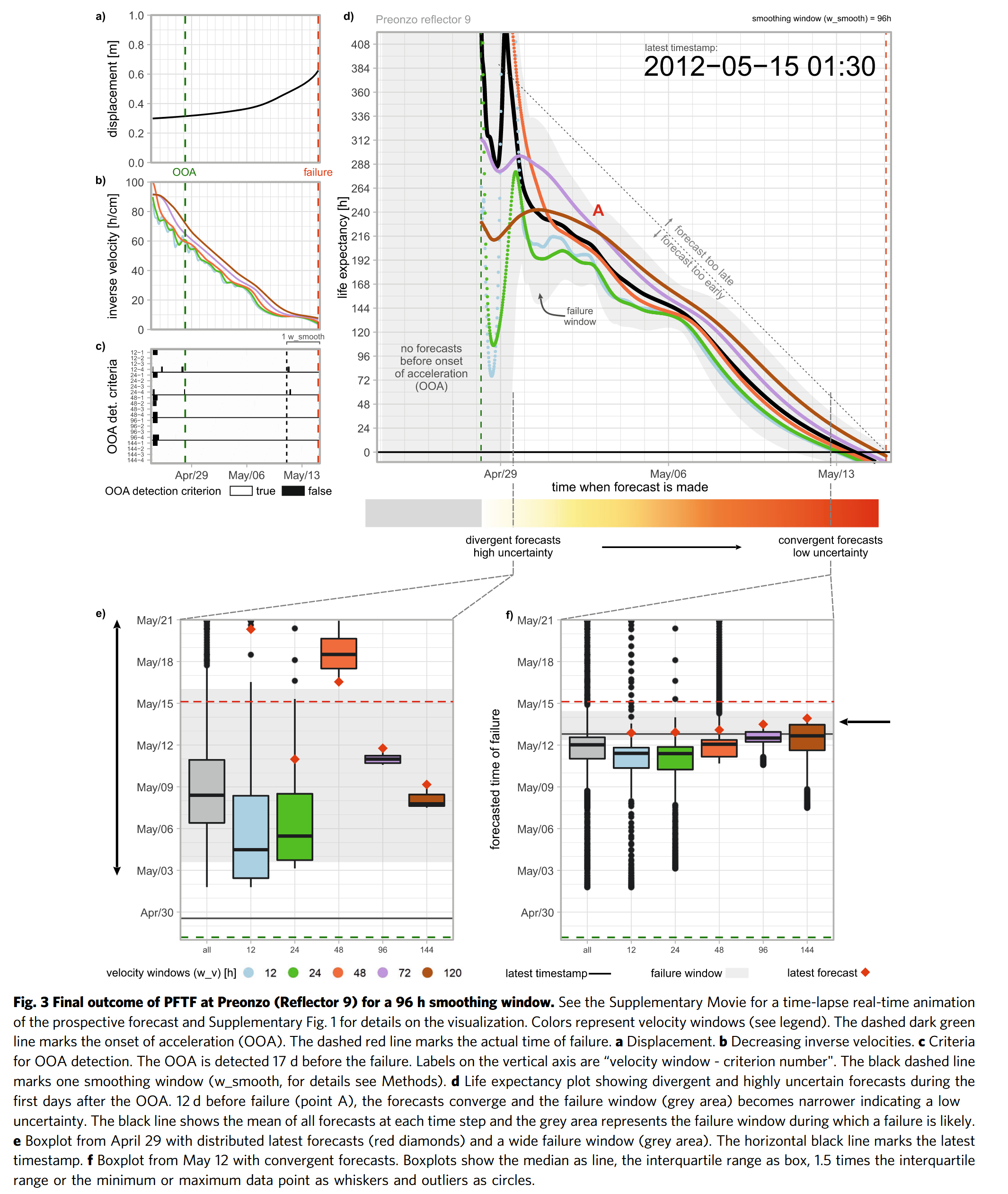
所有测试站点均呈现出失效前预测结果收敛的类似模式。例如,在 Supplementary Movie 中以 Preonzo 站点(反射器9)为例,展示了决策者在实时操作中看到的 PFTF 输出情况。图 3 展示了同一数据中临近失效前三周的预测结果及两个关键时刻(接近加速起点 OOA 和失效时刻)对应的箱型图。
PFTF 结果可分为三个阶段:
-
第一阶段(OOA 刚刚发生后):寿命期望(图 3d)呈高度分散,均值不稳定,缺乏明显下降趋势(如理想的 45° 下降线),失效窗口较宽。图 3e(4月29日)对应的箱型图表明箱体和失效窗口覆盖时间范围较大,最新预测结果(红菱形)在10天范围内波动,整体不确定性较高。
-
第二阶段(图 3d 中的 A 点):预测结果开始收敛,失效窗口变窄。该时间点的位置受平滑程度和 OOA 位置影响。
-
第三阶段(失效前 6–10 天):所有 w v w_v wv 的寿命期望值集中在较短时间内,均值曲线呈稳定 45° 下降,失效窗口缩小至约 2 天。图 3f(5月12日)所示箱型图显示,箱体和失效窗口覆盖范围变窄,最新预测结果趋于一致,此阶段不确定性较低。虽然均值预测比实际失效时间(5月15日)提前一天,但仍处于失效窗口内。
PFTF 模型在所有 46 个数据集中均展现出强大的前瞻性预测能力和鲁棒性。评估预测效果时,需结合预警时间与事件影响之间的关系,即“提前时间”。若作为早期预警工具使用,则预测需满足两个条件:一是足够早(寿命期望 < 提前时间),二是足够准(不确定性 < 提前时间)。
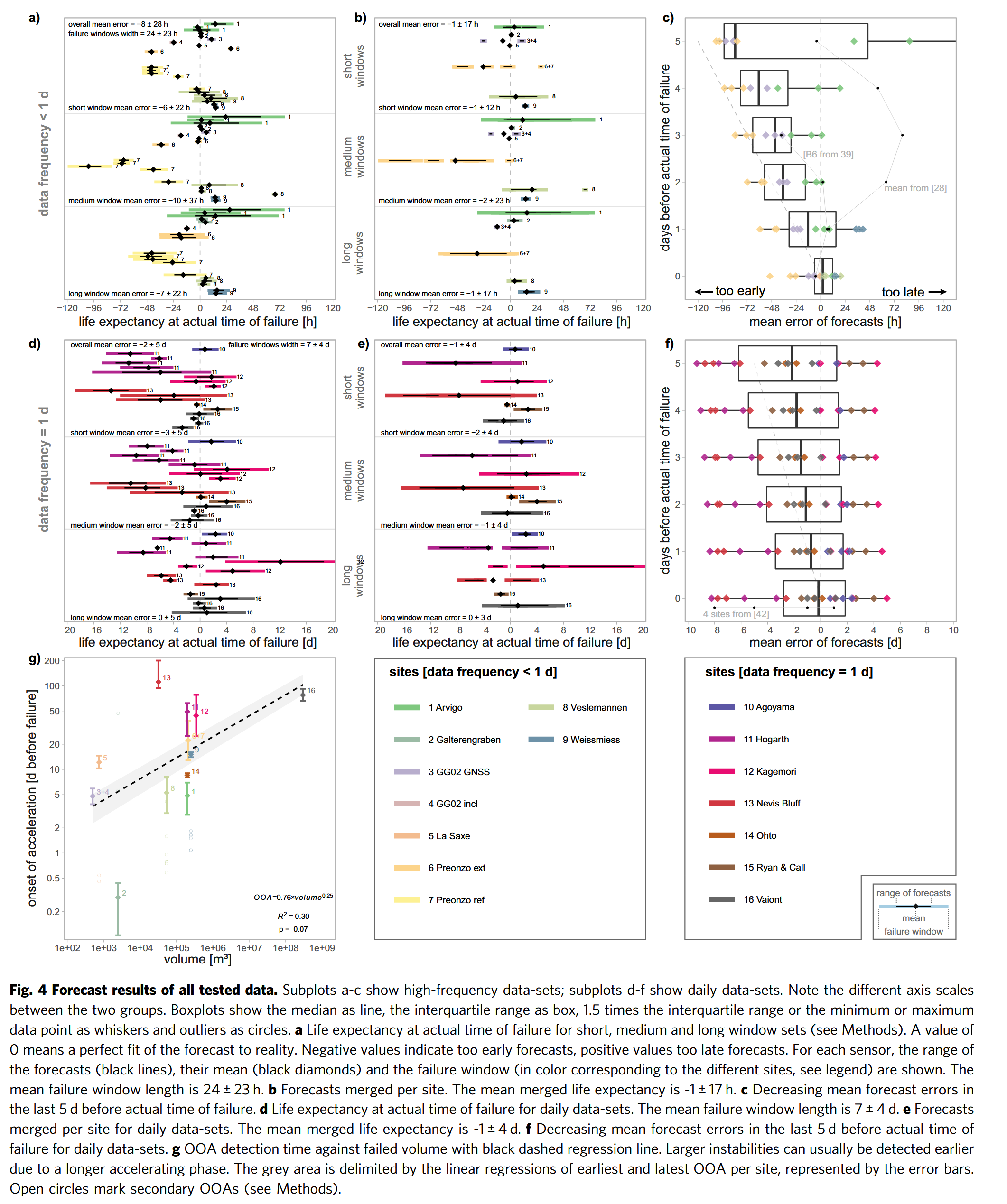
该模型在多种监测方式、不同地质条件下的滑坡过程和七个不同规模的失效中均成功应用。在实际失效时间点上的平均寿命期望为:亚日尺度数据 −1 ± 17 小时,日尺度数据 −1 ± 4 天,表明预测结果与实际情况拟合良好;平均失效窗口宽度分别为 24 ± 23 小时和 7 ± 4 天,与此前对 74 个露天矿边坡失效预测误差上限(约 21 小时)相符。结果表明:在较高采样频率的数据中,预测表现更优。
尽管日尺度数据中预测误差趋于减小的趋势不如亚日尺度明显,但在实际提前时间允许范围内,这种精度通常已足够。图 4a–f 对所有预测结果进行总结,按数据频率分为日尺度(d–f)与高频(a–c)两类。黑色菱形表示最可能失效时间,彩色条表示失效窗口宽度。各站点差异可能由不稳定体的非均匀变形或传感器位置造成。未来需对这些因素进行统计分析,并结合专家对监测数据与地质过程的理解进行判断。
一般而言,更强的平滑会缩短失效窗口,但同时可能将预测延后,从而存在“偏向不安全”的风险(图 4ab+de)。预测误差在临近失效时总体减小。由于日尺度数据的分辨率较低、加速阶段较长,因此这种误差减小趋势不如高频数据明显(图 4c+f)。失效窗口与不确定性在日尺度数据中更大,因此更高采样频率更可取(对比图 4a–c 与 d–f)。
OOA 与失效之间的加速时间与滑坡体积之间大致符合“大体积对应较长加速阶段”的假设16,但本研究中未发现显著统计相关性(基于 14 个站点的对数拟合: O O A = 0.76 ⋅ v o l u m e 0.25 OOA = 0.76 \cdot volume^{0.25} OOA=0.76⋅volume0.25, R 2 = 0.30 R^2 = 0.30 R2=0.30, p = 0.07 p = 0.07 p=0.07)。例如,体积最大滑坡 Vaiont 的 OOA 检测时间在 1963 年 2 月后趋势更新后约 50 天;而 Galterengraben 的加速阶段仅为 3–10 小时,尽管其不是最小体积,说明岩体脆性与体积共同影响最终加速速率;Grabengufer 体积最小,加速阶段却达 5 天,因其滑动发生在一个 40 万立方米的 sackung(深部重力变形)上。多个滑动过程和体积叠加可能影响加速持续时间。
跨传感器与滑坡类型的预测能力。
PFTF 模型可适用于多种滑坡类型(岩崩、岩滑、倾倒、冰崩、复杂滑坡等)和监测方式(GNSS、全站仪、位移计、倾斜仪、InSAR),预测体积范围从
1
0
2
10^2
102 到
1
0
8
10^8
108 m³。虽然由于测试站点的多样性,难以定量比较不同类型和监测方式的结果,但误差差异也可能由不稳定体属性、外部驱动因素(降雨、积雪、孔隙水压力)、传感器位置等引起。
PFTF 模型能够适应各种滑坡的原因,在于其采用了滑坡位移这一现象学量,能综合所有影响过程。与之前在同一站点的研究结果相比(文献 7、28、39、42、43),PFTF 表现相当或更优,特别是在实时预测、不确定性估计和鲁棒性方面(见图 4c+f 中的黑点)。
虽然 PFTF 提供了更多统计信息,辅助决策者评估预测有效性,但仍需地质知识补充,充分理解滑坡场地的过程机制。
影响预测性的两大方面为:
- 本模型中使用的线性反速度法存在简化;
- 外部因素对模型结果有影响。
本模型采用 Fukuzono 方法的线性简化形式,虽然理论上可能引入误差,但因其数学形式最简,实践中使用广泛。大多数情况偏离线性不大(经验值
α
=
2
\alpha=2
α=2),因此该简化有其合理性。个别情形下可能呈略微凸或凹曲线(如 Grabengufer 或 Weissmiess,见补充图 4),在凹形情况下,线性预测结果偏保守(过早);而在凸形情形下,预测可能滞后,造成风险。
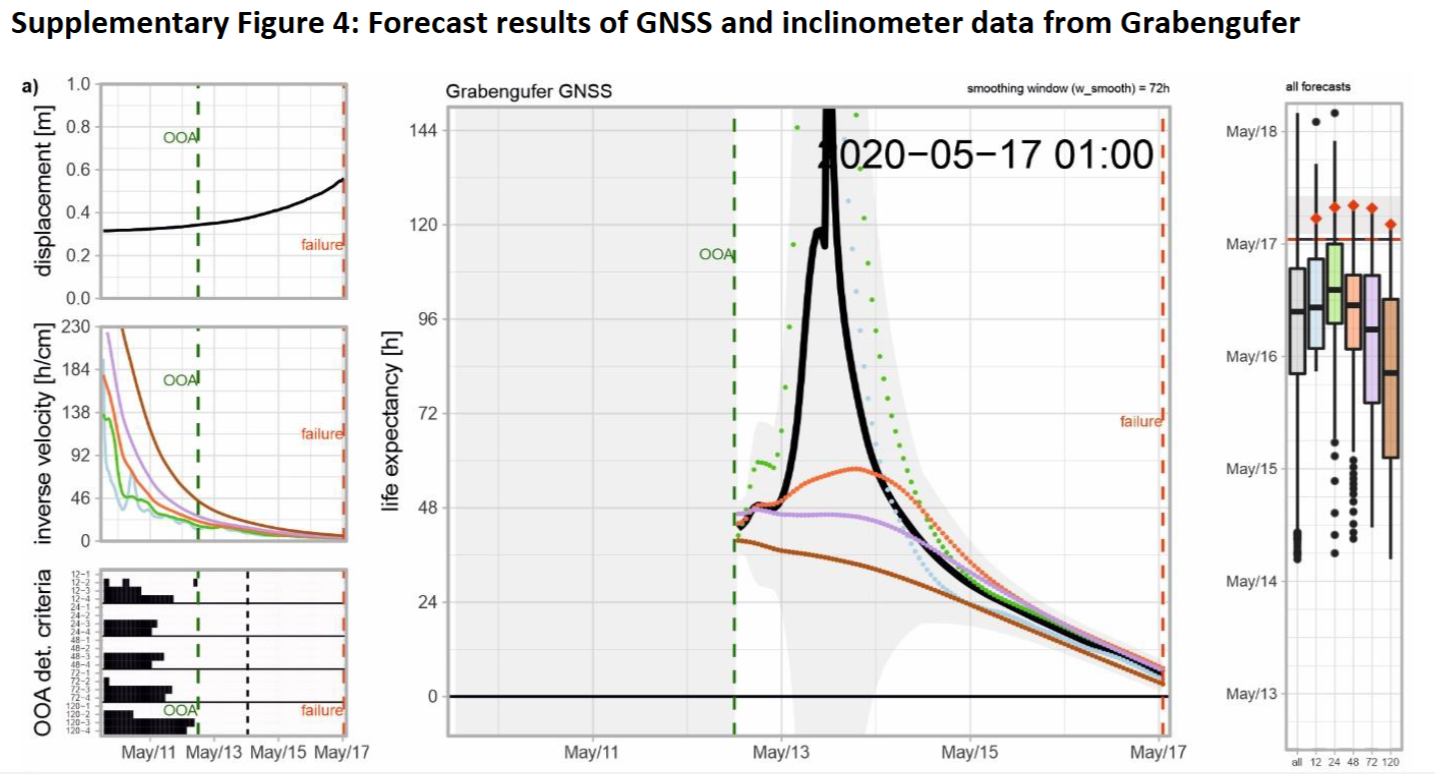
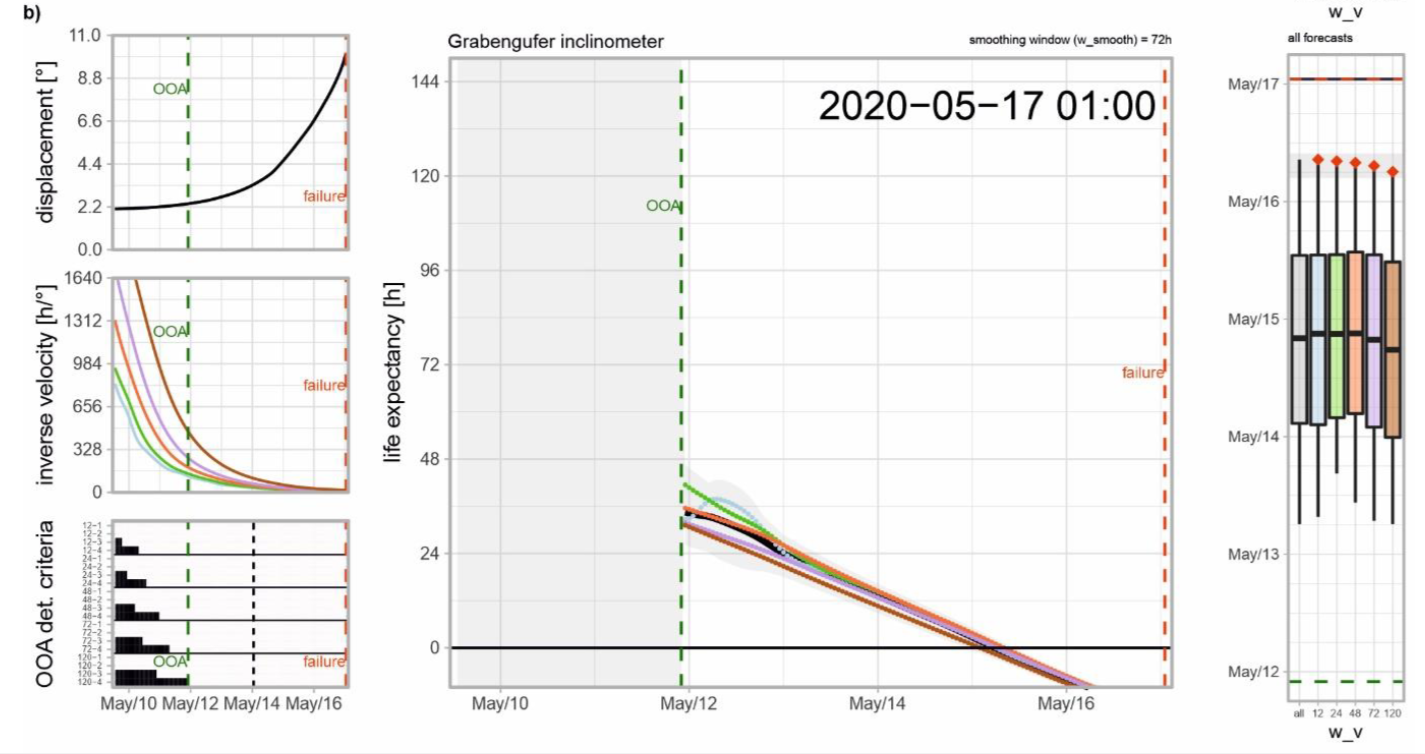
此时需要谨慎解读寿命期望图:若其均值曲线小于 45° 且最新预测位于箱体上方,则表明预测偏迟(凹型);在存在风险的疑难情况下,宁可过早预警以确保安全,即使成本较高。
预测精度也受到输入位移数据(包括其监测方向和三维曲率)、采样频率、滑坡类型和体积等因素影响。即便传感器的监测方向非运动方向或为相对位移(如雷达),PFTF 仍表现良好;它也可处理角度变化(如 Grabengufer 的角度与 GNSS 数据预测仅相差 1 天,原因是统一的固定窗口长度)。在复杂滑坡或实时系统中,判断传感器是否代表性强极具挑战,若传感器未能监测到最终失效部位,则预测可能失效。
PFTF 的有效预测前提是输入数据具代表性。因此输入数据选择和预测结果解读仍需依赖专家经验39,且需进一步研究。寻找最具代表性的传感器,可借助面域观测技术(如雷达、激光扫描、摄影测量)识别变形热点。然而,对于如 La Saxe 等复杂案例,即便如此仍难应对,且决策者需偏向保守。
更高采样频率有助于提高预测精度,但也需更强的平滑处理。使用多窗口策略,能减少主观性并清晰呈现不同窗口长度对结果的影响(见补充图 1)。虽然数据可能暗示加速时间与体积有关,但预测目标不是建立该关系,而是尽早检测 OOA 并合理设定平滑窗口长度。例如:若加速仅持续数小时,则用多日平滑窗口毫无意义。
本文中 La Saxe 与 Veslemannen 是两个具有挑战性的代表性案例。La Saxe 存在速度不一与失效前明显减速;Veslemannen 则受周期性外部因素主导。此类情况需结合经验、过程机制知识及次级 OOA 检测(图 4g 中圆圈)实现成功预测。检测趋势更新点并调整 OOA 可提升前瞻预测效果。
唯一预测结果全部“偏迟”的站点为 Weissmiess 冰崩,可能由以下原因导致:(i)雷达观测方向偏离运动方向;(ii)雷达观测始于 OOA 之后,无法准确识别加速起点;(iii)冰崩机制不同于岩体滑坡,表现为略凸型曲线,其变形速率在失效前两天从 1 m/d 上升至 3.5 m/d。
此案例也表明:加速趋势不仅出现在破裂前的岩体或土体,冰体也具相似特征。
总结:
PFTF 模型克服了传统回溯性预测方法的主要缺陷,能实现多种滑坡类型、体积、物质和传感器条件下的稳定预测。该方法可自动识别加速起点,并提供统一的预测输出与不确定性评估。在无线实时监测和内部破裂监测技术不断进步的背景下,PFTF 有望成为可靠、定量、实时自然灾害管理的核心工具。其适用范围可能超越岩质边坡,扩展至土质、人工边坡、结构物及冰体,支持决策者在多种关键情境下的应急响应。
方法
迭代前瞻性预测
PFTF 模型的算法通过每次获得新的数据点,迭代地计算前瞻性的实时(或模拟实时)预测。PFTF 模型的基本概念如图 1 所示。图 2a 展示了算法的主要步骤,包括:
- 每次迭代读取新的位移数据;
- 移除异常值/错误测量值;
- 平滑原始位移数据(见“数据平滑”);
- 使用多个速度窗口计算速度与反速度(见“反速度计算”);
- 计算反速度的 1% 和 50% 分位数(见“起始点定义”);
- 自动检测加速起始点(onset of acceleration, OOA),作为预测的起始点(见“起始点定义”);
- 计算并绘制失效时间(life expectancy)和失效时刻(见“预测与不确定性表达”)。
该流程的技术实现已通过开源 R 代码完成(RStudio 版本 2021.09.0,R 版本 4.1.3,参见代码可用性说明)。
数据预处理
PFTF 模型以位移数据作为输入。因此,位置数据被转换为相对位移,倾角数据被转换为相对角位移。所有数据被格式化为等间距的时间序列,且无缺失时间步,即每个时间步包含一个位移数据或缺失值(NA)。监测方法的详细信息见补充表格。
数据平滑
PFTF 模型采用两阶段的平滑方法与多个窗口,以实现 OOA 的检测与统计不确定性估计。首先,使用过去 n n n 个值的移动平均对原始位移数据进行平滑,其中 n n n 由所给的平滑窗口长度 w smooth w_{\text{smooth}} wsmooth 决定。为最小化主观判断的影响,建议使用多个平滑窗口。图 3a 展示了平滑后的位移曲线。
第二阶段的平滑在计算反速度时进行,通过在线性回归中使用多个速度窗口 w v w_v wv(见“反速度计算”)。为在本研究中实现不同场地间的可比性,定义了三组标准窗口,并基于简单的决策流程图(补充图 2)应用于分析数据。需注意,其他数据可能需要不同的平滑窗口长度。
反速度计算
从平滑后的位移数据中,通过对最近 n n n 个值(由速度窗口 w v w_v wv 的长度定义)执行线性回归来计算速度。该方法包含 w v w_v wv 内的所有位移数据,并提供过去 w v w_v wv 时间内的最优速度拟合。对于标准窗口集(补充图 2),每种情况下使用五个速度窗口,范围从 1.8 w smooth 1.8w_{\text{smooth}} 1.8wsmooth 到 5 w smooth 5w_{\text{smooth}} 5wsmooth。反速度计算为速度的倒数,即:
v inv = 1 v v_{\text{inv}} = \frac{1}{v} vinv=v1
相关结果见图 3b。
起始点定义
所有在起始点(加速起始,OOA)之后的反速度数据将用于线性外推预测失效时间。OOA 的实时检测基于四个判据(图 2b)。若在一个完整的 w smooth w_{\text{smooth}} wsmooth 时间窗内,四个条件全部满足,则认为当前时刻前 w smooth w_{\text{smooth}} wsmooth 即为 OOA:
- 位移速率增加:最近 w smooth w_{\text{smooth}} wsmooth 时间窗中后半段的位移差大于前半段。
- 反速度下降:在所有速度窗口 w v w_v wv 中,反速度在最近 w smooth w_{\text{smooth}} wsmooth 时间内均呈下降趋势。
- 50% 分位数下降:在所有 w v w_v wv 中,反速度的中位数在最近 w smooth w_{\text{smooth}} wsmooth 时间窗内下降,表示长期加速趋势。
- 反速度小于 1% 分位数:当前反速度小于历史反速度的 1% 分位数,即当前速度大于历史速度的 99%,表示短期急剧加速。
若位移数据出现减速阶段或过程机制变化,分析将仅在更新趋势之后的数据上重新启动,并确定次级 OOA(见补充图 2)。
预测与不确定性表达
预测使用 Fukuzono 方法的线性版本( α = 2 \alpha = 2 α=2):
v inv ( t ) = a ( t f − t ) v_{\text{inv}}(t) = a(t_f - t) vinv(t)=a(tf−t)
其中, t f t_f tf 表示预测的失效时间,其由 OOA 之后的所有反速度的线性外推与时间轴交点确定。结果通过 life expectancy 图表示,即将预测的剩余寿命(life expectancy)随预测时刻绘图。为便于识别趋势变化,图的坐标轴按 1:1 缩放。若预测结果一致,更新后的点将沿 45° 方向向下排列;若预测失效时间延后,曲线将变平缓,反之则变陡。
PFTF 会为每个 w smooth w_{\text{smooth}} wsmooth 绘制一张 life expectancy 图,每个 w v w_v wv 生成一个彩色点(见补充图 1)。预测不确定性通过“失效窗口”估算,该窗口为每个时间点所有预测的最早与最晚时间之间的区间,再在该区间两侧各延伸一半宽度。在 life expectancy 图中,所有 w v w_v wv 在每个时间点的平均预测以黑线表示,失效窗口以灰色区域表示。
此外,还会生成自 OOA 以来所有预测的标准箱型图。每个 w v w_v wv 对应一个彩色箱体,所有 w v w_v wv 的总体预测为灰色箱体。每个 w v w_v wv 的最新失效时间预测以红色菱形标记,当前时间以灰色横线标出,失效窗口同样以灰色区域标示(见补充图 1)。
结果的统计评估
如图 4 所示,为分析所有场地的预测结果,提取了失效前五天至当天之间的 life expectancy、其均值及失效窗口。平均误差为所有预测均值的平均值;不确定性用标准差表示。图 4b 与 4e 中,每个场地的所有预测合并为一条曲线;合并均值为各场地均值的平均。
图 4g 中 OOA 检测时间为每个场地所有值的均值与范围。对均值 OOA 检测时间与体积的 log 10 \log_{10} log10 值进行线性回归,回归带由最小与最大 OOA 检测时间的回归线界定。
场地选择
所选的历史边坡失稳事件基于其可用性与文献记录。除 Weissmiess(冰崩)外,其他均为岩质边坡滑坡。这些场地均具备日采样或更高频率的数据,覆盖从加速前到失效的全过程,监测方法与体积各异,详情见补充表格。
数据可获取性
所用监测数据来源列于补充表格。14 个场地中,有 10 个数据源于已发表研究,4 个为第三方机构或个人提供(Arvigo、Galterengraben、Preonzo 和 Weissmiess)。完整数据集可通过以下地址获取:
https://doi.org/10.14459/2023mp168886848
代码可获取性
PFTF 模型的 R 代码及使用说明为完全开源,地址如下:
https://doi.org/10.5281/zenodo.8010361









![[Godot] C#2D平台游戏基础移动和进阶跳跃代码](https://i-blog.csdnimg.cn/direct/5951af83e0ea4472a16bee492c67dda1.png)